一种用于割草设备的智能遥控装置及其控制方法与流程
本发明属于智能设备,特别涉及一种用于割草设备的智能遥控装置及其控制方法。
背景技术:
1、随着生活水平的提高和智能技术的应用,人们对于户外草坪的护理需求大大提高。对于大型复杂的草坪场地,如草坪地面坑洼不平、低矮障碍物较多的田边等,人们会通过无线遥控装置远程操作大型自行走设备,如割草机进行作业。但是这类自行走设备功率大,速度快。用户手持的无线遥控装置一旦误操作或者掉落,容易引起不必要的操作,产生危险。
技术实现思路
1、针对遥控割草设备过程中,遥控装置出现不必要的操作,引起安全风险的问题,本发明的目的是提供一种用于割草设备的智能遥控装置及其控制方法。
2、为实现上述目的,本发明采用如下技术方案:
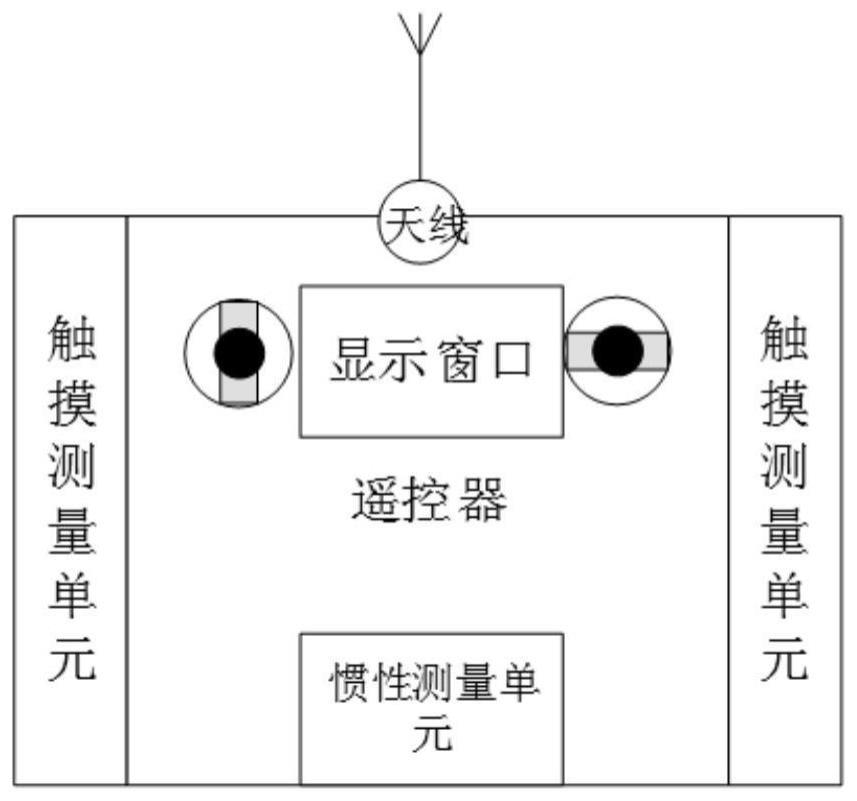
3、一种用于割草设备的智能遥控装置,包括触摸测量单元、惯性测量单元、操控单元、主控单元、无线通信单元、电源电路,其中:
4、所述触摸测量单元位于遥控装置外表面;
5、所述惯性测量单元位于遥控装置内部,用于检测遥控装置的姿态参数;
6、所述操控单元用于发送改变自行走设备运动状态的指令;
7、所述主控单元分别与触摸测量单元、惯性测量单元、操控单元、无线通信单元相连,用于实时检测惯性测量单元的信号强度,并根据信号强度给操控单元下达控制自行走设备行走的指令;
8、所述无线通信单元用于智能遥控装置与自行走设备的通信;
9、所述电源电路用于给触摸测量单元、惯性测量单元、操控单元、主控单元、无线通信单元提供电源。
10、还包括显示单元,由电源电路提供电源,用于显示自行走设备和遥控装置的状态信息和动作信息。
11、所述触摸测量单元位于遥控装置背面和/或遥控装置左右两侧。
12、所述操控单元为摇杆、按键、开关的一种或多种。
13、所述惯性测量单元为陀螺仪。
14、所述自行走设备具有如下工作模式:
15、全速行走,此模式下自行走设备驱动电机在额定功率下输出;
16、低速行走,此模式下自行走设备驱动电机输出功率不超过额定功率的60%;
17、待机工作模式,此模式下自行走设备驱动电机停止或锁止。
18、所述工作模式触发条件如下:
19、全速行走,触摸测量单元被触发;
20、低速行走,触摸测量单元被触发后中止触发;
21、待机工作模式,触摸测量单元被触发后中止触发并持续中止触发状态超预设时间。
22、所述自行走设备为割草机。
23、一种割草设备的其控制方法,包括以下步骤:
24、(1)用户遥控自行走设备进行工作同时用户双手握住遥控装置两侧,触发位于智能遥控装置外表面的多路触摸测量单元;
25、(2)多路触摸测量单元产生触摸信号传输至主控单元;
26、(3)主控单元实时检测到至少一路触摸信号,并与设定的信号阈值进行比较,并根据信号强度给操控单元下达控制自行走设备行走的指令。
27、所述步骤(3)中,
28、若惯性测量单元的信号强度处于正常值,且遥控装置无其他故障,主控单元发送全速行走指令给操控单元以控制自行走设备,用户操作自行走设备进行正常工作;
29、若检测到惯性测量单元的有效信号强度超过设定阈值,主控单元立即发送待机指令给自行走设备,自行走设备停止所有运行动作,进入待机模式,直至主控单元发送模式切换指令;
30、若检测不到触摸测量信号时,主控单元发送低速行走指令,控制自行走设备进入低速模式,同时遥控装置按照设定的阈值时间t0进行倒计数,若在t0回零后,仍检测不到触摸信号,主控单元发送指令给操控单元控制自行走设备进入待机模式,若在t0回零前,主控单元重新检测到至少一路触摸信号,认为用户已准备重新进行遥控装置,主控单元停止当前倒计数,按设定的新阈值时间t1重新进行倒计数,其中t1<t0,若t1回零后,始终能够检测到触摸信号,则主控单元发送指令控制自行走设备重新回到全速模式进行工作,若t1回零前,触摸信号丢失,则停止t1倒计数,重新按t0开始倒计数,直至自行走设备进入待机模式或全速模式。
31、有益效果:本发明针对遥控自行走设备过程中,遥控装置出现不必要的操作,引起安全风险的问题,提供了一种智能遥控装置及其控制方法,能够保护自行走设备和用户安全。本发明的遥控装置具有防跌落安全功能,一旦遥控装置发生跌落,能够立即停止自行走设备动作。本发明的遥控装置具有防误操作安全功能,一旦用户手离开遥控装置,遥控装置能够降低自行走设备运行速度,保证安全,直至停止。
技术特征:
1.一种用于割草设备的智能遥控装置,其特征在于:包括触摸测量单元、惯性测量单元、操控单元、主控单元、无线通信单元、电源电路,其中:
2.根据权利要求1所述的用于割草设备的智能遥控装置,其特征在于:还包括显示单元,由电源电路提供电源,用于显示自行走设备和遥控装置的状态信息和动作信息。
3.根据权利要求1所述的用于割草设备的智能遥控装置,其特征在于:所述触摸测量单元位于遥控装置背面和/或遥控装置左右两侧。
4.根据权利要求1所述的用于割草设备的智能遥控装置,其特征在于:所述操控单元为摇杆、按键、开关的一种或多种。
5.根据权利要求1所述的用于割草设备的智能遥控装置,其特征在于:所述惯性测量单元为陀螺仪。
6.根据权利要求1所述的用于割草设备的智能遥控装置,其特征在于:所述自行走设备具有如下工作模式:
7.根据权利要求6所述的用于用于割草设备的智能遥控装置,其特征在于:所述工作模式触发条件如下:
8.根据权利要求1所述的用于用于割草设备的智能遥控装置,其特征在于:所述自行走设备为割草机。
9.一种基于权利要求1至8任一所述的智能遥控装置的割草设备控制方法,其特征在于:包括以下步骤:
10.根据权利要求9所述的控制方法,其特征在于:所述步骤(3)中,
技术总结
本发明公开了一种用于割草设备的智能遥控装置及其控制方法,包括触摸测量单元、惯性测量单元、操控单元、主控单元、无线通信单元、电源电路,其中:所述触摸测量单元位于遥控装置外表面;所述惯性测量单元位于遥控装置内部,用于检测遥控装置的姿态参数;所述操控单元用于发送改变自行走设备运动状态的指令;所述主控单元分别与触摸测量单元、惯性测量单元、操控单元、无线通信单元相连,用于实时检测惯性测量单元的信号强度,并根据信号强度给操控单元下达控制自行走设备行走的指令;所述无线通信单元用于智能遥控装置与自行走设备的通信;所述电源电路用于提供电源。本发明能够保护自行走设备和用户安全。
技术研发人员:丁广华,花跃学,刘贯营,刘楷
受保护的技术使用者:南京苏美达智能技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!