一种蔬菜采收剪根机构及其使用方法与流程
本发明涉及植物工厂自动化设备的,特别是一种蔬菜采收剪根机构及其使用方法。
背景技术:
1、随着科学技术的不断发展,愈来愈多的自动化技术被应用到农业种植领域,这些技术被用来降低种植农作物所需的人力成本,提高工作效率,降低生产成本。营养液栽培是植物工厂的一种主要方式,植物生长初期需要海绵来吸取营养液。目前常见的植物工厂种植方式是将种子播种的海绵上,海绵通过定植杯放在栽培槽里进行种植生长。植物生长以后根系会嵌入海绵中。在植株生长成熟后,植物的采收过程中,需要分离植株和定植杯,并将植株与海绵连接的根系剪除,从而方便后续的包装过程。目前植物工厂的上述过程一般采用人工作业,生产效率低下,且现有的植物工厂内的自动化设备一般采用固定位置剪根,而由于植物生产时海绵与植物的相对位置存在差异,通过固定位置去剪根会导致把植物剪掉或者海绵没有完全剪掉的情况,影响蔬菜植株的剪根采收效率。
技术实现思路
1、为此,需要提供一种蔬菜采收剪根机构及其使用方法,现有植物工厂设备中,无法快速脱离定植杯、精确剪除植株上带有海绵块的根系。
2、为实现上述目的,本发明提供了一种蔬菜采收剪根机构,包括:
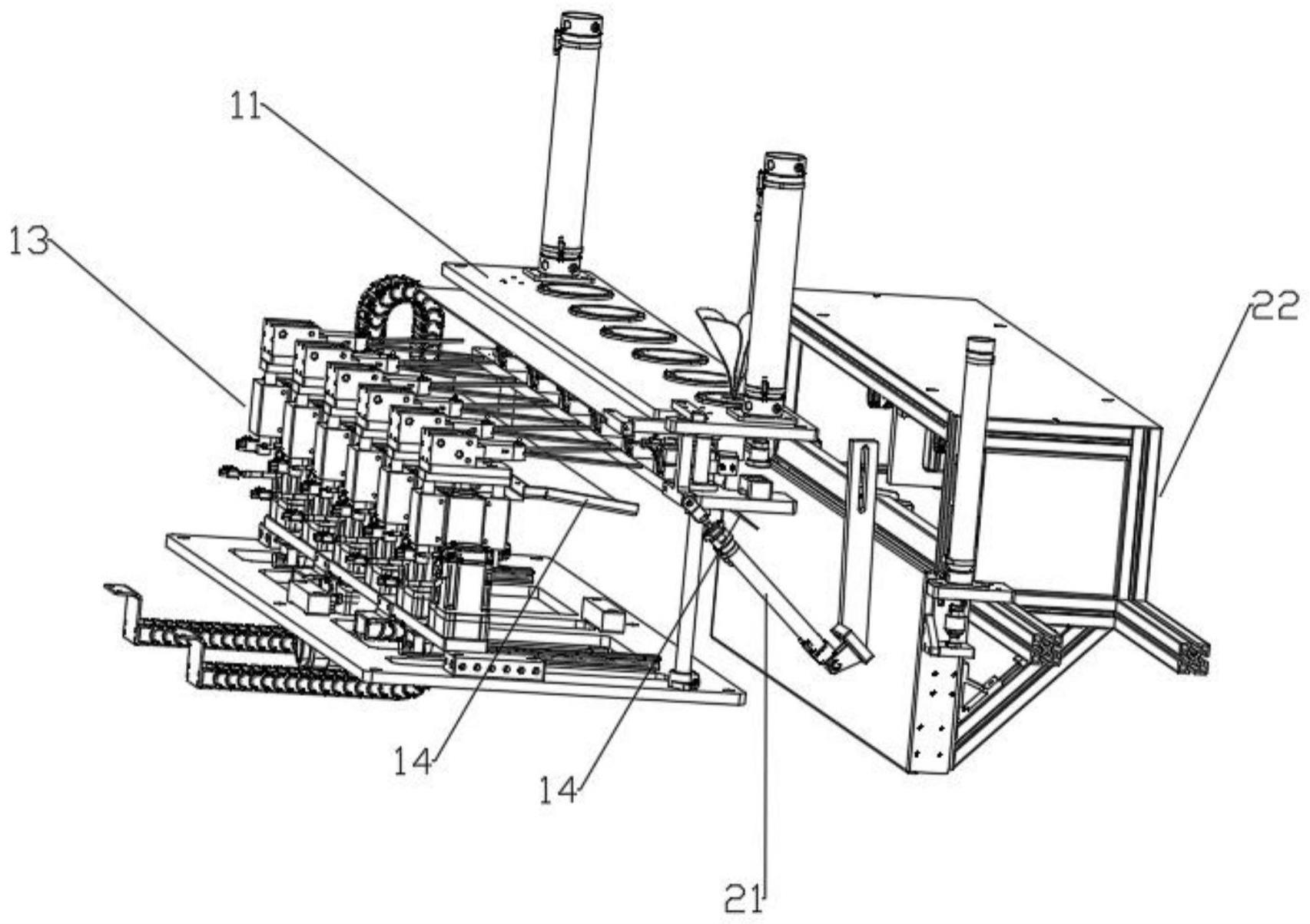
3、剪根装置,所述剪根装置包括放置托架、夹爪单元和气剪单元,所述放置托架用于放置根部带有定植杯的蔬菜植株,所述夹爪单元位于放置托架的下方,所述夹爪单元用于抓取定植杯并通过下降运动使得定植杯和蔬菜植株相分离,所述气剪单元位于放置托架的侧边,所述气剪单元用于对蔬菜植株的根系进行剪切;
4、视觉检测装置,所述视觉检测装置包括视觉背景单元和视觉相机单元,所述视觉相机单元和气剪单元分别位于放置托架相对的两侧边,所述视觉背景单元翻转设置在放置托架上,所述视觉背景单元用于为视觉相机单元提供统一纯色背景,所述视觉相机单元用于拍摄获取蔬菜植株根部的位置信息,所述气剪单元用于根据视觉相机获取的蔬菜植株根部的位置信息升降至对应高度。
5、进一步,所述放置托架包括放置托板和支撑柱,所述支撑柱支撑固定所述放置托板,所述放置托板上间隔设置有多个放置孔。多个放置孔能够同时放置多株蔬菜,提高设备的工作效率。
6、进一步,所述视觉背景单元包括纯色背景板、连接件和翻转气缸,所述纯色背景板位于放置托板靠近气剪单元的侧边,所述纯色背景板的靠近放置托板的侧边与放置托板的底面通过转轴转动连接,所述翻转气缸通过连接件驱动所述纯色背景板翻转运动。
7、纯色背景板通过翻转气缸进行翻转设置,在视觉相机单元拍照完成后,可以向上翻转,避免纯色背景板影响气剪单元的工作,同时纯色背景板与放置托板的底面连接,当纯色背景板向上翻转时,且最后的翻转位置为水平位置,限制了翻转位置。
8、进一步,所述纯色背景板的长度方向与放置托板的长度方向相一致,所述连接件包括固定件和t型转动件,所述固定件固定在放置托板上,所述t型转动件的竖直端与固定件转动连接,所述t型转动件水平的两端分别与纯色背景板的宽度侧边和翻转气缸的输出轴连接。
9、通过固定件和t型转动件的设置连接,方便翻转气缸的驱动纯色背景板进行翻转运动。
10、进一步,所述夹爪单元包括升降板、气缸夹爪和升降气缸,所述升降板通过滑动轴承套设在支撑柱上,所述升降气缸竖直固定在放置托板上,所述升降气缸的输出轴与升降板连接,所升降板上固定有多个所述气缸夹爪,所述气缸夹爪的位置与放置托板的放置孔一一对应。
11、气缸夹爪用于夹住蔬菜植株根系上的定植杯,升降气缸通过升降板带动气缸夹爪下移,从而使得定植杯与蔬菜植株根系相分离。
12、进一步,所述夹爪单元还包括第一限制拖链,所述第一限制拖链的一端固定设置,所述第一限制拖链的另一端与升降板相固定,所述夹爪单元的气管和电线穿设在第一限制拖链内,所述气缸夹爪的夹爪上固定有弧形的夹板,所述夹板在竖直方向上延伸设置。
13、第一限制拖链跟随升降板的升降而进行伸展或收缩,气管和电线穿设在第一限制拖链内,避免在升降过程中,气管和电线方式相互折弯缠绕,减少气管发生损坏弧形并在竖直方向上延伸的夹板能够有效的夹住定植杯,有效保证定植杯和蔬菜植株的脱离。
14、进一步,所述气剪单元包括固定底板、剪根滑轨、滑动气缸、滑动底板、升降电缸、伺服电机、伺服驱动器和气剪,所述剪根滑轨固定在固定底板上,所述滑动底板滑动设置在剪根滑轨上,所述剪根滑轨沿水平朝向放置托架的方向延伸设置,所述滑动气缸驱动所述滑动底板沿剪根滑轨滑动,所述滑动底板设有多个所述升降电缸,所述升降电缸上设有所述气剪,所述气剪的位置与放置托板上的放置孔位置相对应,所述伺服驱动器与伺服电机、视觉相机单元均电性连接,所述伺服驱动器用于接受视觉相机单元得到的位置信息并通过伺服电机驱动升降电缸分别升降至对应位置。
15、剪根单元的滑动气缸和升降电缸使得气剪能够进行横向和竖直方向的运动,从而完成剪根动作,
16、进一步,所述气剪单元还包括第二限制拖链,所述第二限制拖链的一端固定设置,所述第二限制拖链的另一端与滑动底板相连接,所述气剪单元的电线和气管穿设在第二限制拖链内,所述固定底板远离放置托架的侧边固定有定位挡块,所述滑动气缸和滑动底板通过连接块连接,所述定位挡块与连接块的侧面活动挡接。
17、第二限制拖链跟随滑动底板的往复滑动而进行伸展或收缩,气管和电线设置在二限制拖链内,避免在升降过程中,气管和电线方式相互折弯缠绕,避免气管发生损坏定位挡块用于定位滑动底板向外滑动的距离。
18、进一步,所述视觉相机单元包括安装架、安装箱体、拍照相机和相机光源,所述安装架位于放置托架的侧边,所述安装箱体固定在安装架上,所述安装箱体朝向放置托架的侧面为开放侧面,所述安装箱体内设有多个朝向放置托架的所述拍照相机和所述相机光源。
19、拍照相机用于对蔬菜植株的根部进行拍照,并获取植株根部和海绵块的高度位置信息,之后将信息传输给气剪单元,使其对对应高度的根部进行剪切,保证剪根后,海绵块连同根系完全剪除掉,保证蔬菜采收的质量。
20、进一步,所述视觉相机单元还包括挡污板和防污气缸,所述安装箱体的开放侧面的两侧边固定有竖直滑轨,所述挡污板滑动设置在竖直滑轨上,所述防污气缸的输出轴与挡污板相连接,所述挡污板滑动遮挡安装箱体的开放侧面。
21、当蔬菜进行剪根时,防污气缸驱动挡污板遮挡安装箱体的开放侧面,避免剪根时的部分杂屑飞溅到安装箱体内,相机镜头沾到脏污进而导致视觉判断精度下降的问题。
22、上述的蔬菜采收剪根机构的使用方法,包括如下步骤:
23、(1)外部机器或人工将成熟的蔬菜植株放置到放置托架上,此时蔬菜植株的根部依然带有定植杯;
24、(2)夹爪单元上升抓取蔬菜植株根部的定植杯,之后夹爪单元下降,带动定植本与蔬菜植株的根部相互脱离;
25、(3)视觉背景单元翻转,在蔬菜植株根部的背面形成统一纯色背景;
26、(4)视觉相机单元对拍摄获取蔬菜植株根部并获取其位置信息,视觉相机单元将位置信息传递给气剪单元;
27、(5)视觉背景单元翻转至初始位置避免阻挡气剪单元,气剪单元根据得到的位置信息,分别升降至对应高度,剪除蔬菜植株的根系及其上的海绵块。
28、上述技术方案具有以下有益效果:
29、本发明中,夹爪单元能够完成蔬菜植株根部和定植杯的自动化分离,而视觉背景单元能够为视觉相机提供一个统一的纯色背景,当视觉相机单元用于拍摄获取蔬菜植株根部和海绵块位置信息时,可以提升视觉单元得到的蔬菜根部的精确度性,从而使得气剪单元能够精确的减除连同海绵块的蔬菜植物根系,保证蔬菜的采收质量。
- 还没有人留言评论。精彩留言会获得点赞!