一种双臂托举式猕猴桃液体授粉无人机
1.本实用新型涉及果树授粉装置技术领域,具体涉及一种双臂托举式猕猴桃液体授粉无人机。
背景技术:
2.猕猴桃属于雌雄异株型的果树,在生产上必须配置授粉树。但是由于猕猴桃花期常常遇恶劣天气、雌雄花期不遇或授粉昆虫数量不足等问题,最终导致自然条件下授粉受精不良,致使出现坐果率低及果实品质差等情况。因此,仅仅依靠自然授粉已经不能实现猕猴桃的优质丰产,亟需适宜的人工辅助授粉以应对该产业难题。
3.人工授粉最初多采用纸袋收集花粉,采用人工点授法,即用带橡皮头的铅笔、毛笔或棉棒沾些许花粉点授到雌蕊柱头上,但这种方法操作较为繁琐,工作量大,不利于节约人力、物力。后来陆续出现了授粉枪、授粉无人机等。目前授粉枪多需要人工进行喷施,存在工人长时间作业易疲惫、换粉次数多、液体授粉中花粉分布不均匀、喷头易堵塞等缺陷。目前授粉无人机多位于果树上方进行作业,并不适合猕猴桃。猕猴桃为藤本、攀缘植物,需搭架栽培,花期时,猕猴桃花多位于猕猴桃枝干、叶片侧下方。因此,有必要研发一种适用于猕猴桃的授粉无人机。
技术实现要素:
4.本实用新型的目的是提供一种双臂托举式猕猴桃液体授粉无人机,以解决现有技术的不足。
5.本实用新型采用以下技术方案:
6.一种双臂托举式猕猴桃液体授粉无人机,包括机身、螺旋桨及底座,机身内外包括花粉液仓、第一压力泵、第二压力泵、第一喷头、第二喷头、第一摄像头、第二摄像头和电池;
7.花粉液仓设于机身内中间位置,花粉液仓顶端一部分伸出机身顶端,作为花粉液加注口,花粉液加注口内设有过滤网,花粉液加注口处设有顶盖;花粉液仓底端一部分伸出机身底端,作为清洗出口,清洗出口处设有底盖;花粉液仓内顶端两侧分别设有第一搅拌轴、第二搅拌轴,第一搅拌轴、第二搅拌轴底端分别设有第一搅拌叶片、第二搅拌叶片,第一搅拌叶片、第二搅拌叶片位于花粉液仓内上部,用于驱动第一搅拌轴、第二搅拌轴的第一搅拌电机、第二搅拌电机分别设于第一搅拌轴、第二搅拌轴花粉液仓外部对应位置;花粉液仓内下部设有主动轮、从动轮和输送带,主动轮和从动轮通过输送带连接,主动轮驱动电机设于主动轮转轴花粉液仓外部对应位置,输送带外侧均匀设有若干翅片,所述翅片为长方形翅片,长方形翅片倾斜设在输送带上,输送带上方长方形翅片向第一连接管的方向倾斜,若干长方形翅片在一圈输送带上倾斜方向一致;花粉液仓内设有液位计,用于测量花粉液仓内花粉液的高度;
8.第一压力泵、第二压力泵分别位于花粉液仓两侧,第一压力泵通过第一连接管和花粉液仓连通,第一连接管顶端所在高度等于或稍低于上方输送带高度,第一连接管上设
有第一单向阀以使花粉液单向从花粉液仓流至第一压力泵;第二压力泵通过第二连接管和花粉液仓连通,第二连接管底端所在高度等于或稍高于下方输送带高度,第二连接管上设有第二单向阀以使花粉液单向从花粉液仓流至第二压力泵;第一压力泵通过第三连接管伸至机身一侧外部,第二压力泵通过第四连接管伸至机身另一侧外部;
9.第一喷头、第二喷头包括喷头本体和喷柄,喷柄由斜管和横管组成,斜管和横管连接角度在120
°‑
150
°
,喷头本体设在斜管端部,第一喷头的横管端部和第三连接管连通,第二喷头的横管端部和第四连接管连通;第一喷头和第二喷头以机身垂直中心线对称分布,第一喷头和第二喷头形成倒八型;
10.第一摄像头、第二摄像头设在机身外顶端,分别位于花粉液加注口两侧;
11.电池用于给液体授粉无人机所需用电部件供电,电池设于机身内。
12.进一步地,还包括与第一摄像头、第二摄像头、第一压力泵、第二压力泵、液位计、第一搅拌电机、第二搅拌电机和主动轮驱动电机通信连接的主控制器,主控制器设于机身内。
13.进一步地,花粉液仓外壁缠绕冷却液管,冷却液管顶端穿出机身,作为冷却液进出口,冷却液进出口处设有冷却液管盖。
14.进一步地,第一搅拌叶片、第二搅拌叶片为八字搅拌叶片。
15.进一步地,第一喷头、第二喷头的斜管和横管连接角度在135
°
。
16.进一步地,电池为无线充电锂电池。
17.本实用新型的有益效果:
18.1、本实用新型双臂托举式猕猴桃液体授粉无人机设有第一喷头和第二喷头,第一喷头和第二喷头以机身垂直中心线对称分布,第一喷头和第二喷头在机身两侧形成倒八型,适用于猕猴桃授粉。
19.2、本实用新型花粉液仓设有上搅拌系统和下搅拌系统,上搅拌系统包括2个搅拌电机、2个搅拌轴及2个搅拌叶片,下搅拌系统包括主动轮、从动轮、设若干翅片的输送带及主动轮驱动电机,能保证花粉在液体中充分混匀,克服了花粉在液体中分布不均的缺陷,同时可以灵活根据花粉液仓内花粉液的多少控制是否开启上搅拌系统。
20.3、本实用新型输送带外侧均匀设有若干长方形翅片,长方形翅片倾斜设在输送带上,输送带上方长方形翅片向第一连接管的方向倾斜,若干长方形翅片在一圈输送带上倾斜方向一致;第一连接管顶端所在高度等于或稍低于上方输送带高度,第二连接管底端所在高度等于或稍高于下方输送带高度,这样下搅拌系统不仅起到搅拌均匀的作用,同时有引流及减少压力泵(第一压力泵、第二压力泵)功耗的作用。
21.4、本实用新型花粉液仓内设有液位计,可以根据液位计测得的花粉液仓内花粉液的高度,控制是否开启上搅拌系统。同时由于花粉液仓内设有液位计,机身及花粉液仓不需要透明的材质来观察花粉液情况,从而利于保持花粉活力(黑暗条件下有利于保持花粉活力)。
22.5、本实用新型花粉液加注口内设有过滤网,可过滤掉花粉液中花瓣残片、花药皮等杂质,有效防止喷头的堵塞。
23.6、本实用新型在机身顶端设有花粉液加注口,利于花粉液加入,在机身底端还设有清洗出口,方便清洗。
24.7、本实用新型第一连接管上设有第一单向阀以使花粉液单向从花粉液仓流至第一压力泵,第二连接管上设有第二单向阀以使花粉液单向从花粉液仓流至第二压力泵,从而有效防止花粉液倒流。
25.8、本实用新型花粉液仓外壁优选缠绕冷却液管,有利于保持花粉活力,同时对机身内温度起到调节的作用。
附图说明
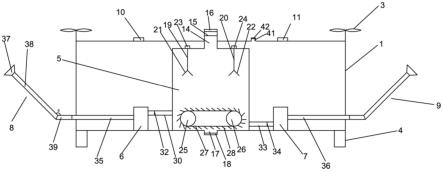
26.图1为本实用新型垂直剖面结构示意图(示意出花粉液仓内部)。
27.图2为本实用新型垂直剖面结构示意图(示意出花粉液仓外部)。
28.图3为本实用新型机身内水平剖面结构示意图。
具体实施方式
29.下面结合实施例和附图对本实用新型做更进一步地解释。下列实施例仅用于说明本实用新型,但并不用来限定本实用新型的实施范围。
30.一种双臂托举式猕猴桃液体授粉无人机,如图1至图3所示,包括机身1、飞行电机2、转轴(图1至图3未示意出)、螺旋桨3及底座4(飞行电机2、转轴、螺旋桨3的结构、连接、工作等根据无人机技术领域常规手段实现,本实用新型不具体描述)。机身1内外包括花粉液仓5、第一压力泵6、第二压力泵7、第一喷头8、第二喷头9、第一摄像头10、第二摄像头11、电池12和主控制器13。
31.花粉液仓5设于机身1内中间位置,花粉液仓5顶端一部分伸出机身1顶端,作为花粉液加注口14,利于花粉液加入。花粉液加注口14内设有过滤网15,可过滤掉花粉液中花瓣残片、花药皮等杂质,有效防止喷头的堵塞,过滤网15优选为不锈钢过滤网。花粉液加注口14处设有顶盖16。花粉液仓5底端一部分伸出机身1底端,作为清洗出口17,方便清洗。清洗出口17处设有底盖18。花粉液仓5内顶端两侧分别设有第一搅拌轴19、第二搅拌轴20,第一搅拌轴19、第二搅拌轴20底端分别设有第一搅拌叶片21、第二搅拌叶片22,第一搅拌叶片21、第二搅拌叶片22可选为八字搅拌叶片,第一搅拌叶片21、第二搅拌叶片22位于花粉液仓5内上部,用于驱动第一搅拌轴19、第二搅拌轴20的第一搅拌电机23、第二搅拌电机24分别设于第一搅拌轴19、第二搅拌轴20花粉液仓5外部对应位置。花粉液仓5内下部设有主动轮25、从动轮26和输送带27,主动轮25和从动轮26通过输送带27连接,主动轮驱动电机28设于主动轮转轴29花粉液仓5外部对应位置,输送带27外侧均匀设有若干翅片28,所述翅片28为长方形翅片,长方形翅片倾斜设在输送带27上,输送带27上方长方形翅片向第一连接管30的方向倾斜,若干长方形翅片在一圈输送带27上倾斜方向一致。若干长方形翅片和输送带27可一体成型,长方形翅片和输送带27材质可选用硅胶材质,长方形翅片硅胶满足耐液体冲击且不易变形的要求,输送带27硅胶满足传输的要求。花粉液仓5内设有液位计31,用于测量花粉液仓5内花粉液的高度。
32.第一压力泵6、第二压力泵7分别位于花粉液仓5两侧。第一压力泵6通过第一连接管30和花粉液仓5连通,第一连接管30顶端所在高度等于或稍低于上方输送带27高度,第一连接管30上设有第一单向阀32以使花粉液单向从花粉液仓5流至第一压力泵6,防止花粉液倒流。第二压力泵7通过第二连接管33和花粉液仓5连通,第二连接管33底端所在高度等于
或稍高于下方输送带27高度,第二连接管33上设有第二单向阀34以使花粉液单向从花粉液仓5流至第二压力泵7,防止花粉液倒流。第一压力泵6通过第三连接管35伸至机身1一侧外部,第二压力泵7通过第四连接管36伸至机身1另一侧外部。
33.第一喷头8、第二喷头9包括喷头本体37和喷柄,喷柄由斜管38和横管39组成,斜管38和横管39连接角度θ在120
°‑
150
°
,优选在135
°
,喷头本体37设在斜管38端部,第一喷头8的横管39端部和第三连接管35连通,第二喷头9的横管39端部和第四连接管36连通。第一喷头8和第二喷头9以机身1垂直中心线对称分布,第一喷头8和第二喷头9形成倒八型。
34.第一摄像头10、第二摄像头11设在机身1外顶端,分别位于花粉液加注口14两侧。
35.电池12用于给液体授粉无人机所需用电部件供电,包括给第一搅拌电机23、第二搅拌电机24、主动轮驱动电机28、第一压力泵6、第二压力泵7、第一摄像头10、第二摄像头11和飞行电机2供电。电池12优选为无线充电锂电池,电池12设于机身1内。第一摄像头10、第二摄像头11也可由自带电池供电。
36.主控制器13与飞行电机2、第一摄像头10、第二摄像头11、第一压力泵6、第二压力泵7、液位计31、第一搅拌电机23、第二搅拌电机24和主动轮驱动电机28通信连接,主控制器13设于机身1内。主控制器13用于包括接收第一摄像头10、第二摄像头11传送的花朵位置数据控制无人机的飞行,并进行第一压力泵6、第二压力泵7的花粉液流速调节;接收液位计31测量的花粉液仓5内花粉液高度数据控制第一搅拌电机23、第二搅拌电机24的转动,及主动轮驱动电机28的转动,花粉液仓5上部还有花粉液,第一搅拌电机23、第二搅拌电机24及主动轮驱动电机28均开启,花粉液仓5上部无花粉液,下部有花粉液,只有主动轮驱动电机28开启。
37.优选地,花粉液仓5外壁还缠绕冷却液管40,冷却液管40顶端穿出机身1,作为冷却液进出口41,冷却液进出口41处设有冷却液管盖42。设置冷却液管40有利于保持花粉活力,同时对机身1内温度起到调节的作用。
38.工作时,第一摄像头10、第二摄像头11、第一搅拌电机23、第二搅拌电机24及主动轮驱动电机28开启(花粉液仓5上部还有花粉液,第一搅拌电机23、第二搅拌电机24及主动轮驱动电机28均开启;花粉液仓5上部无花粉液,下部有花粉液,只有主动轮驱动电机28开启;如图1所示,输送带27逆时针旋转),并驱动飞行电机2,进而带动转轴转动,进而带动螺旋桨3旋转,进而带动无人机起飞,无人机飞行在两行猕猴桃之间,位于猕猴桃枝干、叶片及花朵的下方,通过第一摄像头10、第二摄像头11观察需要授粉花朵位置,第一摄像头10和第一压力泵6联动,第二摄像头11和第二压力泵7联动,由主控制器13根据第一摄像头10、第二摄像头11传送的花朵位置数据控制无人机的飞行,并进行第一压力泵6、第二压力泵7的花粉液流速调节。
39.主控制器13接收第一摄像头10、第二摄像头11传送的花朵位置数据,并根据接收的数据控制无人机的飞行,并进行第一压力泵6、第二压力泵7的花粉液流速调节,及接收液位计31测量的花粉液仓5内花粉液高度数据,并根据接收的数据控制第一搅拌电机23、第二搅拌电机24的转动,及主动轮驱动电机28的转动,这些根据通信及人工智能领域常规技术手段实现即可,因其不是本实用新型要求保护的内容,本实用新型在此不具体阐述。
40.清洗时,将顶盖16和底盖18打开,用清水对花粉液仓5内进行冲洗,花粉液仓5冲洗干净后,关闭底盖18,花粉液仓5内加入清水,关上顶盖16,打开第一压力泵6和第二压力泵
7,对管道、压力泵、喷头进行清洗。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1