一种茶叶采摘机械夹爪
1.本实用新型涉及茶叶采摘技术领域,具体涉及一种茶叶采摘机械夹爪。
背景技术:
2.本实用新型对于背景技术的描述属于与本实用新型相关的相关技术,仅仅是用于说明和便于理解本实用新型的
技术实现要素:
,不应理解为申请人明确认为或推定申请人认为是本实用新型在首次提出申请的申请日的现有技术。
3.现有的茶叶采摘机械爪的采摘方式较多,但针对功能简单的机械夹爪则较多,同时能够满足多种功能的采摘装置,存在结构复杂、使用效率较低等问题。例如公告号为cn111149514b的中国发明专利,公开了“旋折式茶叶单芽采摘机械手”,其通过夹爪机构、驱动夹爪机构转动的旋折机构以及驱动旋折机构转动的输送机构完成机械手的组装;利用气缸驱动实现夹爪机构的开合功能,在利用旋折机构中的旋转电机实现旋转功能,最后经过输送机构中的输送电机将茶叶收集到采收盒中,从而完成整个茶叶采摘过程。此种采摘机械手通过旋转式的采摘方式,但是对于茶叶的品质缺少判断,导致茶叶采摘的品质较低;例如公开号cn109005908b的中国发明专利,公开了“一种便携式柑子采摘装置”,其通过控制单元的按钮控制剪切单元转动调整方向,继而控制舵机使得夹爪上的锯齿切刀将柑子剪切下,进而控制剪切夹爪转动九十度放入进料斗内,通过布袋落入到存储箱内,其中剪切装置主要利用夹爪固定,舵机带动锯齿实现剪切功能,此机构装置实现了半自动化的控制设计。现有的茶叶采摘装置,可以实现茶叶的采摘,但是采摘茶叶的品质较低,而且采摘后不能够实现自动收集。
实用新型内容
4.本实用新型的目的在于提供一种茶叶采摘机械夹爪,以解决现有的茶叶采摘装置采摘茶叶后,无法自动收集的问题。
5.本实用新型解决上述技术问题的技术方案如下:
6.一种茶叶采摘机械夹爪,其包括安装板以及设置在安装板上的夹爪采摘组件,安装板包括夹取端和出料端,安装板设有吸附管道,吸附管道的两端分别延伸至夹取端和出料端;出料端连通有吸附收集装置,夹爪采摘组件采摘茶叶后,茶叶在吸附收集装置的作用下,经吸附管道,从夹取端吸附至出料端并进行收集。
7.采用上述技术方案的有益效果为:夹爪采摘组件将茶叶采摘下来,当夹爪采摘组件松开茶叶时,在吸附收集装置的作用下,茶叶被吸入到吸附管道中,并从出料端落入到吸附收集装置中。本技术方案在安装板上设置吸附管道,使得夹爪采摘组件采摘茶叶后即可通过吸附管道完成茶叶收集工作,本技术方案集茶叶的采摘和收集为一体,不仅采摘效率更高同时对茶叶的损伤更小,克服了现有茶叶的采摘和收集分工完成的问题。
8.进一步地,夹爪采摘组件包括设置在安装板上的控制器、舵机、齿条滑块以及设置在夹取端的开合夹爪,齿条滑块与开合夹爪连接,齿条滑块与安装板滑动配合并设有齿槽,
舵机的输出轴与齿槽啮合;舵机与控制器电性连接。
9.采用上述技术方案的有益效果为:当舵机工作时,舵机的输出轴转动,使得齿条滑块在安装板上实现位移,位移的过程中调整开合夹爪的开合,开合夹爪打开和闭合完成采摘茶叶一次。舵机提供一定的驱动力,使磁条滑条实现的位移的过程中调整开合夹爪的开合,此种连接结构更为紧凑,并且通过调整舵机的工作状态,即可改变开合夹爪的采摘速度,使用更为灵活。
10.进一步地,吸附管道靠近夹取端的两侧沿安装板的横向分别设有夹爪滑槽,齿条滑块的运动方向沿安装板的纵向;开合夹爪包括第一连接臂、第二连接臂以及分别在夹爪滑槽中滑动的第一抓取臂和第二抓取臂,第一连接臂和第二连接臂分别与齿条滑块和相对应的抓取臂铰接。
11.采用上述技术方案的有益效果为:当齿条滑块向夹取端位移时,第一连接臂和第二连接臂之间的夹角增大,第一抓取臂和第二抓取臂相互分离,开合夹爪处于张开的状态;确定要采摘的茶叶后,齿条滑块向出料端位移,第一连接臂和第二连接臂之间的夹角逐渐减小,第一抓取臂和第二抓取臂相互靠近,直至第一抓取臂和第二抓取臂闭合,从而将茶叶采摘下来。开合夹爪为联动结构,采摘茶叶的效率高。
12.进一步地,夹爪滑槽中均设有抓取臂限位组件,抓取臂限位组件包括限位杆和套设在限位杆上的弹性件,限位杆沿夹爪滑槽的延伸方向设置在夹爪滑槽中,抓取臂套设在相应的限位杆上;弹性件的两端分别与夹爪滑槽的内壁和相对应的抓取臂连接。
13.采用上述技术方案的有益效果为:第一抓取臂和第二抓取臂在张开和闭合的过程中,都沿着限位杆滑动,限位杆不仅起到限位的作用,还能避免第一抓取臂和第二抓取臂与夹爪滑槽中脱离,使得第一抓取臂和第二抓取臂的滑动更为稳定。
14.进一步地开合夹爪上设有相对设置的激光发生器和激光接收器,激光发生器和激光接收器均与控制器通信连接。
15.采用上述技术方案的有益效果为:激光发生器与激光接收器组合使用,当茶叶叶茎通过激光射线时进行计数,对于不符合要求的茶叶则不计数,激光接收器将计数结果传输给控制器。激光发生器和激光接收器起到计数的作用,在采摘过程中可以及时获取采摘数据,简化人工操作。
16.进一步地,开合夹爪上设有相对设置的压力传感器,压力传感器与控制器通信连接。
17.进一步地,安装板上设置有用于监控茶叶形态的摄像头,摄像头位于吸附管道的上方;摄像头与控制器通信连接。
18.进一步地,安装板上还设置有连接机械臂装置的外部接口,外部接口与控制器电性连接。
19.进一步地,舵机和齿条滑块的外侧分别设有防护罩。
20.采用上述技术方案的有益效果为:在茶叶采摘的过程中,舵机和齿条滑块工作过程中不可避免的会落入灰尘和茶叶,严重时会导致舵机和齿条滑块无法正常运作,设置防护罩可以避免此问题的发生,减少清理维修舵机和齿条滑块的次数。
21.本实用新型具有以下有益效果:
22.1.本实用新型在安装板上设置吸附管道,使得夹爪采摘组件采摘茶叶后即可通过
吸附管道完成茶叶收集工作,本技术方案集茶叶的采摘和收集为一体,不仅采摘效率更高同时对茶叶的损伤更小,克服了现有茶叶的采摘和收集分工完成的问题。
23.2.本实用新型的舵机提供一定的驱动力,使磁条滑条实现的位移的过程中调整开合夹爪的开合,此种连接结构更为紧凑,并且通过调整舵机的工作状态,即可改变开合夹爪的采摘速度,使用更为灵活。
24.3.本实用新型限位杆不仅起到限位的作用,还能避免第一抓取臂和第二抓取臂与夹爪滑槽中脱离,使得第一抓取臂和第二抓取臂的滑动更为稳定。
25.4.本实用新型的激光发生器和激光接收器起到计数的作用,在采摘过程中可以及时获取采摘数据,简化人工操作。
26.5.本实用新型设置防护罩可以避免舵机和齿条滑块工作过程中落入灰尘和茶叶,减少清理维修舵机和齿条滑块的次数。
附图说明
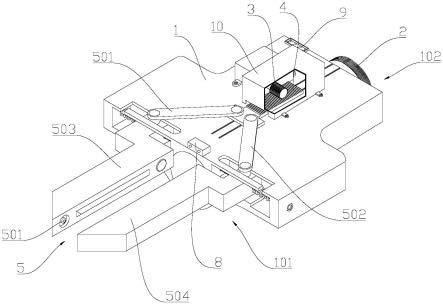
27.图1为本实用新型茶叶采摘机械夹爪的结构示意图。
28.图2为本实用新型的安装板的结构示意图。
29.图3为本实用新型的限位组件的结构示意图。
30.图4为本实用新型的齿条滑块的结构示意图。
31.图5为本实用新型的第一抓取臂的结构示意图。
32.图6为本实用新型的第二抓取臂的结构示意图。
33.图中:1-安装板;101-夹取端;102-出料端;103-夹爪滑槽;131-限位杆;132-弹性件;2-吸附管道;3-舵机;4-齿条滑块;401-齿槽;5-开合夹爪;501-第一连接臂;502-第二连接臂;503-第一抓取臂;504-第二抓取臂;601-激光发生器;602-激光接收器;7-压力传感器;8-摄像头;9-外部接口;10-防护罩。
具体实施方式
34.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
35.实施例
36.请参照图1,一种茶叶采摘机械夹爪,其包括安装板1以及设置在安装板1上的夹爪采摘组件,安装板1包括夹取端101和出料端102,安装板1设有吸附管道2,吸附管道2的两端分别延伸至夹取端101和出料端102,夹爪采摘组件设置在夹取端101用于采摘茶叶,出料端102连通有吸附收集装置,在本实施例中吸附收集装置为带有负压风机的收集箱,此处吸附收集装置为现有技术,具体的结构和工作原理不再赘述。夹爪采摘组件将茶叶采摘下来,当夹爪采摘组件松开茶叶时,在吸附收集装置的作用下,茶叶被吸入到吸附管道2中,并从出料端102落入到吸附收集装置中。在安装板1上设置吸附管道2,使得夹爪采摘组件采摘茶叶后即可通过吸附管道2完成茶叶收集工作,本机械夹爪集茶叶的采摘和收集为一体,不仅采摘效率更高同时对茶叶的损伤更小,克服了现有茶叶的采摘和收集分工完成的问题。
37.请参照图1至图3,安装板1呈t型,宽度小的一端为出料端102,宽度大的一端为夹取端101,吸附管道2设置在沿安装板1轴线的中部。吸附管道2为圆形通孔,吸附管道2靠近
出料端102的一端延伸出安装板1并加工有螺纹,加工的螺纹用于安装吸附收集装置。吸附管道2靠近夹取端101的两侧分别设有夹爪滑槽103,夹爪滑槽103沿安装板1的横向设置,夹爪滑槽103沿吸附管道2的轴线对称设置,夹爪滑槽103均为长方形的凹槽,夹爪滑槽103的上方设置有条形通孔。夹爪滑槽103中均设有抓取臂限位组件,抓取臂限位组件包括限位杆131和套设在限位杆131上的弹性件132,限位杆131横向设置在夹爪滑槽103中,在本实施例中,限位杆131为长螺钉,弹性件132为弹簧,限位杆131从安装板1的侧壁横向穿过夹爪滑槽103并钉入到夹爪滑槽103的内壁中。值得说明的是,限位杆131在安装时并未伸入到管道中。
38.图1和图2,夹爪采摘组件包括设置在安装板1上的控制器、舵机3、齿条滑块4以及开合夹爪5,舵机3和齿条滑块4均设置在安装板1上,舵机3的输出轴加工有外齿,舵机3与控制器电性连接。控制器的型号为at89c2051单片机或stc12c2051单片机,齿条滑块4呈条形,齿条滑块4上设有齿槽401,舵机3的输出轴与齿槽401啮合,齿条滑块4与开合夹爪5连接。舵机3和齿条滑块4的外侧分别设有防护罩10,防护罩10之间连通,方便舵机3的输出轴与齿条滑块4连接。齿条滑块4的防护罩10沿着齿条滑块4的位移方向的两端均设有开口,用于齿条滑块4进行移动,在茶叶采摘的过程中,舵机3和齿条滑块4工作过程中不可避免的会落入灰尘和茶叶,严重时会导致舵机3和齿条滑块4无法正常运作,设置防护罩10可以避免此问题的发生,减少清理维修舵机3和齿条滑块4的次数。沿安装板1的纵向方向的端面设有导滑槽,舵机3的输出轴转动,使得齿条滑块4沿着导滑槽位移。当舵机3工作时,舵机3的输出轴转动,使得齿条滑块4在安装板1上实现位移,位移的过程中调整开合夹爪5的开合,开合夹爪5打开和闭合完成采摘茶叶一次。舵机3提供一定的驱动力,使磁条滑条实现的位移的过程中调整开合夹爪5的开合,此种连接结构更为紧凑,并且通过调整舵机3的工作状态,即可改变开合夹爪5的采摘速度,使用更为灵活。
39.请参照图1、图5和图6,开合夹爪5包括第一连接臂501、第二连接臂502以及分别在夹爪滑槽103中滑动的第一抓取臂503和第二抓取臂504,第一抓取臂503和第二抓取臂504均包括折弯部和剪切部,折弯部伸入到夹爪滑槽103中并套设在限位杆131上,弹性件132设置在折弯部的外壁与夹爪滑槽103的内壁之间的位置,第一抓取臂503和第二抓取臂504在张开和闭合的过程中,都沿着限位杆131滑动,限位杆131不仅起到限位的作用,还能避免第一抓取臂503和第二抓取臂504与夹爪滑槽103中脱离,使得第一抓取臂503和第二抓取臂504的滑动更为稳定。第一连接臂501的一端通过销钉与第一连接臂501的折弯部铰接,第一连接臂501的另一端通过销钉与齿条滑块4铰接。第二连接臂502的一端通过销钉与第二连接臂502的折弯部铰接,第二连接臂502的另一端通过销钉与齿条滑块4铰接。第一抓取臂503和第二抓取臂504的剪切部相互平行设置并设有尖角,并且闭合后的第一抓取臂503和第二抓取臂504呈y型。当齿条滑块4向夹取端101位移时,第一连接臂501和第二连接臂502之间的夹角增大,第一抓取臂503和第二抓取臂504相互分离,开合夹爪5处于张开的状态;确定要采摘的茶叶后,齿条滑块4向出料端102位移,第一连接臂501和第二连接臂502之间的夹角逐渐减小,第一抓取臂503和第二抓取臂504相互靠近,直至第一抓取臂503和第二抓取臂504闭合,从而将茶叶采摘下来。开合夹爪5为联动结构,采摘茶叶的效率高。
40.开合夹爪5上设置有相对设置的激光发生器601和激光接收器602,在本实施例中,激光发生器601设置在第一抓取臂503的剪切部的内侧,激光接受器相对设置在第二抓取臂
504的剪切部的内侧,并且激光发生器601和激光接收器602靠近相对应的剪切部的尖角,在其他实施例中,激光发生器601和激光接收器602设置的位置可以互换。激光发生器601与激光接收器602组合使用,当茶叶叶茎通过激光射线时进行计数,对于不符合要求的茶叶则不计数,激光接收器602将计数结果传输给控制器。激光发生器601和激光接收器602配合使用起到计数的作用,在采摘过程中可以及时获取采摘数据,简化人工操作。开合夹爪5上设有相对设置的压力传感器7,压力传感器7设置在相对应的抓取臂的剪切部的内侧,在本实施例中,激光发生器601与相对应的压力传感器7之间设置有剪切刃,激光接收器602与相对应的压力传感器7之间设有与剪切刃相匹配的凹槽。安装板1上设置有用于监控茶叶形态的摄像头8,所述摄像头8位于所述吸附管道2的上方。安装板1上还设置有连接机械臂的外部接口9,所述外部接口9与所述控制器电性连接。
41.激光发生器601、激光接收器602、摄像头8和压力传感器7均与控制器通信连接。当采摘茶叶时,激光发生器601和激光接收器602产生激光射线,当茶叶的叶径通过激光射线时则进行计数,激光接收器602将计数结果传输给控制器。压力传感器7实现机械夹爪压力值大小的测定,反馈到控制器然后控制舵机3,实现夹爪力度的控制,安装在安装板1上的摄像头8对优质茶叶的外形进行判断,符合要求的茶叶则通过吸附管道2进行吸附收集。
42.机械夹爪的工作过程:1)摄像头8对茶叶形态进行摄像,判断茶叶是否符合采摘需求和茶叶的采摘位置,摄像头8将结果传输给控制器;2)当确定所需采摘的茶叶后,控制器将信号传输给舵机3,舵机3工作,齿条滑块4位移,第一抓取臂503和第二抓取臂504张开;3)确定茶叶位于第一抓取臂503和第二抓取臂504之间后,第一抓取臂503和第二抓取臂504缓慢闭合,实现茶叶叶茎的固定和切割,在此过程中,压力传感器7读取夹紧力值并反馈给控制器,若压力传感器7的夹紧力值达到夹断数值,激光传感器对其进行计数,反之则不能计数;4)当该位置的茶叶采摘完成后,机械夹爪复位重新捕捉符合采摘要求的茶叶。
43.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1