一种新型马铃薯原原种繁育网棚打药机的制作方法
1.本技术涉及农药喷洒机技术领域,具体是一种新型马铃薯原原种繁育网棚打药机。
背景技术:
2.现有技术中,马铃薯原原种经常使用网棚进行繁育,逐渐取代传统种植方式,成为主要种植手段之一。
3.马铃薯原原种在成长过程需要通过喷洒农药的方式进行病虫害房子,可是,由于大棚空间封闭并且高度有限,相比于种植于大田的作物能够使用机动农具来喷洒农药,网棚中繁育的马铃薯原原种通常采用人工的方式来喷洒农药。
4.可是通过人工的方式来喷洒农药,不止浪费大量的人力,而且工作效率低下,另外由于大棚空间封闭,所以弥散在空气中的农药会对工作人员的身体造成损害。
技术实现要素:
5.本技术提供了一种新型马铃薯原原种繁育网棚打药机,能够解决现有的马铃薯原原种的网棚繁育需要人工进行农药喷洒的问题。
6.本技术的技术方案是一种新型马铃薯原原种繁育网棚打药机,使用时被放置在网棚中并且沿着田垄的延伸方向行进,所述打药机包括:在行进方向上依次管道连通的用于储存药液的储液罐、用于输送所述储液罐中药液的液泵和用于接收药液并且向所述田垄喷洒药液的喷药组件;
7.其中,所述喷药组件包括若干段设置方向与所述行进方向垂直并且在水平方向上延伸的送药杆和从所述送药杆延伸出的喷洒方向朝下的喷头;
8.以及,所述打药机还包括:设置在所述储液罐下端的用于带动所述储液罐沿着田垄的延伸方向行进的驱动结构、设置在所述驱动结构上端的用于获取并传送关于驱动结构的行进信息的传感器组和接收所述行进信息并根据所述行进信息控制所述驱动结构的行进方向和行进路程以及控制所述液泵是否输送药液的控制器。
9.可选地,所述打药机还包括:内部设置有空腔的基壳;
10.所述储液罐、液泵和控制器设置在所述基壳的空腔内,并且所述喷药组件设置在所述基壳在行进方向上的后端,以及所述驱动结构设置在所述基壳的底端。
11.可选地,若干段送药杆依次首尾可拆卸连接。
12.可选地,与所述基壳的后端连接的送药杆的设置形状为t形,t形的送药杆中的相对两端为圆管状并且分别同轴连接设置形状为圆管状的送药杆。
13.可选地,所述圆管状的送药杆的设置数量为六个,并且t形的送药杆中相对两端的每一端均连接有三个圆管状的送药杆。
14.可选地,t形的送药杆中的相对两端和圆管状送药杆远离t形的送药杆的一端均沿着圆周方向等间距延伸出若干个远离圆管状送药杆中心轴的互相不接触的凸起并且若干
个所述凸起远离所述中心轴的一侧连接有覆盖所述凸起并且与所述中心轴同轴设置的圆环;
15.其中,相邻两个所述凸起之间的弧长大于所述凸起靠近所述中心轴一侧的弧长;
16.以及,圆管状送药杆靠近t形的送药杆的一端的外端面延伸出若干个可伸进相邻两个凸起之间并且能绕所述中心轴转动的连接片,所述连接片在靠近t形的送药杆的一端沿着圆周方向延伸出在所述连接片转动后与所述凸起靠近所述液泵的一侧抵接的卡片。
17.可选地,t形的送药杆中的相对两端和圆管状送药杆远离t形的送药杆的一端上凸起的设置数量均为三个;
18.以及,每个所述圆管状送药杆中连接片的设置数量也为三个。
19.可选地,所述传感器组包括用于获取行进方向的位置传感器和用于获取行进路程的距离传感器。
20.综上可知,本技术提供了一种新型马铃薯原原种繁育网棚打药机,使用时被放置在网棚中并且沿着田垄的延伸方向行进,打药机包括:在行进方向上依次管道连通的储液罐、液泵和喷药组件,以及设置在储液罐下端的驱动结构、设置在驱动结构上端的用于获取行进信息的传感器组和接收行进信息并根据行进信息控制驱动结构的行进方向和行进路程以及控制液泵是否输送药液的控制器。由于本技术可以通过控制器控制驱动结构的行进方向和行进路程以及控制液泵是否输送药液来实现农药的自动喷洒,所以本技术能够解决现有的马铃薯原原种的网棚繁育需要人工进行农药喷洒的问题,用于获取行进信息,既提高了生产效率,也增强了生产的技术性和安全性。
附图说明
21.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
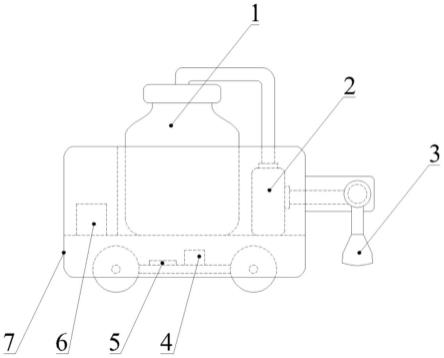
22.图1为本技术实施例中一种新型马铃薯原原种繁育网棚打药机的侧视图;
23.图2为本技术实施例中一种新型马铃薯原原种繁育网棚打药机的后视图;
24.图3为本技术实施例中相邻两个送药杆的连接示意图;
25.图4为本技术实施例中相邻两个送药杆未连接时的径向剖视图;
26.图5为本技术实施例中相邻两个送药杆连接时的径向剖视图;
27.其中,1-储液罐;2-液泵;3-喷药组件;31-送药杆;311-凸起;312-圆环;313-连接片;32-喷头;4-驱动结构;5-传感器组;6-控制器;7-基壳。
具体实施方式
28.下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本技术相一致的所有实施方式。仅是与权利要求书中所详述的、本技术的一些方面相一致的系统和方法的示例。
29.本技术提供了一种新型马铃薯原原种繁育网棚打药机,使用时被放置在网棚中并且沿着田垄的延伸方向行进,如图1和图2所示,图1为本技术实施例中一种新型马铃薯原原
种繁育网棚打药机的侧视图,图2为本技术实施例中一种新型马铃薯原原种繁育网棚打药机的后视图,打药机包括:储液罐1、液泵2、喷药组件3、驱动结构4、传感器组5和控制器6。
30.储液罐1、液泵2和喷药组件3在行进方向上依次管道连通,其中,储液罐1用于储存药液,液泵2用于通过管道从储液罐1中抽取药液并且通过管道将药液输送至喷药组件3,喷药组件3用于接收药液并且向田垄喷洒药液。喷药组件3包括若干段设置方向与行进方向垂直并且在水平方向上延伸的送药杆31和从送药杆31延伸出的喷洒方向朝下的喷头32。
31.驱动结构4设置在储液罐1下端,用于带动储液罐1沿着田垄的延伸方向行进。
32.具体地,驱动结构4包括驱动器和通过传动结构与驱动器连接的轮架,以及设置在轮架下端的轮子。驱动器启动后,通过传动结构,带动沿着行进方向上相对两侧轮子之间的轮轴转动,进而带动轮子转动,最后带动储液罐1沿着田垄的延伸方向行进。
33.传感器组5设置在驱动结构4上端,用于获取并传送关于驱动结构4的行进信息。
34.具体地,在打药机行进过程中,需要确保打药机按照直线行走,并且不能碰撞到网棚的端处,所以设置传感器组5保证可以迅速获取参照驱动结构4的包括行进方向和行进路程等行进信息并将行进信息传送至控制器6进行分析并得出相关控制命令。
35.控制器6接收行进信息并根据行进信息控制驱动结构4的行进方向和行进路程以及控制液泵2是否输送药液。
36.具体地,控制器6接收传感器组5传送的行进信息后,根据行进信息分析驱动结构4是否已经偏离原定的行进方向,如果偏离,控制器6传送修正命令至驱动结构4,驱动结构4根据修正命令修正行进方向。控制器6还根据行进信息分析驱动结构4的行驶路程,如果驱动结构4已经行进了预定距离,控制器6传送停止命令至液泵2和驱动结构4,液泵2和驱动结构4接收到停止命令后,立刻停止输送药液和带动储液罐1行进。
37.在一些实施例中,打药机还包括:内部设置有空腔的基壳7。储液罐1、液泵2和控制器6设置在基壳7的空腔内,并且喷药组件3设置在基壳7在行进方向上的后端,以及驱动结构4设置在基壳7的底端。
38.具体地,基壳7的设置可以保护储液罐1、液泵2和控制器6等结构稳定地运作,提高本技术的实用性。
39.在一些实施例中,若干段送药杆31依次首尾可拆卸连接。
40.在一些实施例中,与基壳7的后端连接的送药杆31的设置形状为t形,t形的送药杆31中的相对两端为圆管状并且分别同轴连接设置形状为圆管状的送药杆31。圆管状的送药杆31的设置数量为六个,t形的送药杆31中相对两端的每一端均连接有三个圆管状的送药杆31。
41.具体地,送药杆31设置有t形方便了与液泵2的连接,也方便了与其他送药杆31的连接,提高了本技术的实用性。
42.在一些实施例中,t形的送药杆31中的相对两端和圆管状送药杆31远离t形的送药杆31的一端均沿着圆周方向等间距延伸出若干个远离圆管状送药杆31中心轴的互相不接触的凸起311并且若干个凸起311远离中心轴的一侧连接有覆盖凸起311并且与中心轴同轴设置的圆环312。其中,相邻两个凸起311之间的弧长大于凸起311靠近中心轴一侧的弧长。
43.圆管状送药杆31靠近t形的送药杆31的一端的外端面延伸出若干个可伸进相邻两个凸起311之间并且能绕中心轴转动的连接片313,连接片313在靠近t形的送药杆31的一端
沿着圆周方向延伸出在连接片313转动后与凸起311靠近液泵2的一侧抵接的卡片。
44.具体地,如图3、图4和图5所示,图3为本技术实施例中相邻两个送药杆的连接示意图,图4为本技术实施例中相邻两个送药杆未连接时的径向剖视图,图5为本技术实施例中相邻两个送药杆连接时的径向剖视图,连接片313的设置形状为l形,并且直角端设置在远离所述送药杆31管身的一端。在需要连接两个送药杆31时,将一个送药杆31的连接片313端与另一个送药杆31的凸起311端相对,并且将连接片313伸入两个相邻凸起311之间,然后转动连接片313,直至连接片313与凸起311靠近液泵2的一侧抵接。
45.在一些实施例中,t形的送药杆31中的相对两端和圆管状送药杆31远离t形的送药杆31的一端上凸起311的设置数量均为三个。以及,每个圆管状送药杆31中连接片313的设置数量也为三个。
46.具体地,根据通常的网棚结构,t形的送药杆31每端连接三个圆管状送药杆31能适用大多数的网棚。
47.在一些实施例中,传感器组5包括用于获取行进方向的位置传感器和用于获取行进路程的距离传感器。
48.具体地,位置传感器可以是电子罗盘传感器,距离传感器可以是里程传感器。
49.综上可知,本技术实施例提供了一种新型马铃薯原原种繁育网棚打药机,使用时被放置在网棚中并且沿着田垄的延伸方向行进,打药机包括:在行进方向上依次管道连通的储液罐1、液泵2和喷药组件3,以及设置在储液罐1下端的驱动结构4、设置在驱动结构4上端的传感器组5和接收行进信息并根据行进信息控制驱动结构4的行进方向和行进路程以及控制液泵2是否输送药液的控制器6。由于本技术实施例可以通过控制器6控制驱动结构4的行进方向和行进路程以及控制液泵2是否输送药液,所以本技术实施例可以实现农药的自动喷洒,并且取代了人工农药喷洒的工作方式,既提高了生产效率,也增强了生产的技术性和安全性。
50.以上对本技术的实施例进行了详细说明,但内容仅为本技术的较佳实施例,不能被认为用于限定本技术的实施范围。凡依本技术范围所作的均等变化与改进等,均应仍属于本技术的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1