一种遥控自走式多杆升降果树修剪机
1.本实用新型涉及一种农林业机械,尤其是涉及一种用于果树田间特定树形修剪的装置。
技术背景
2.果树的整形修剪作为果园种植管理中一个及其重要的环节越来越多受到了种植管理者的重视,目前市面上果树整形修剪多采用手工剪、手工锯或者电动、气动等工具进行徒手修剪,修剪过程中需要登高修剪,危险系数高,常有意外发生;修剪工人在树下修剪也容易被掉落树枝砸中受伤。随着我国人口老龄化加剧,从事一线农林业生产作业的人员往往年龄偏大,手脚不灵活,能进行户外登高作业的人员非常有限,因此,提供一种机械化修剪设备来代替人工作业显得尤为迫切。
技术实现要素:
3.为了解决上述问题,本实用新型提供一种遥控自走式多杆升降果树修剪机。它具备遥控操作,能在林间遥控自动行走,对特定树枝进行遥控切割修剪。
4.本实用新型的目的是这样实现的:一种遥控自走式多杆升降果树修剪机,包括动力系统、行走系统、升降系统、切割系统和控制系统,其特征在于,所述的升降系统由一层摆臂、二层折臂、摆臂油缸、折臂油缸、转台和转台底座组成,转台上铰接一层摆臂和摆臂油缸的下端,一层摆臂上端铰接二层折臂一端,摆臂油缸的上端铰接在一层摆臂下部;折臂油缸两端分别铰接在一层摆臂上部和二层折臂上;转台底座安装在行走系统的底盘装置上,转台带动升降系统整体完成左右各180
°
旋转。
5.所述的切割系统由旋转臂转动机构、旋转臂、切割臂油缸,切割臂,电动链锯,四连杆机构组成,旋转臂转动机构安装在二层折臂上并连接带动旋转臂,旋转臂由四连杆机构分别与切割臂和切割臂油缸一端铰接,切割臂油缸另一端与旋转臂上一点位铰接,切割臂外端安装有电动链锯。
6.摆臂油缸安装位置设计标准为,以其柱塞的伸缩能实现一层摆臂在一点范围内30
°
左右的摆动角为准。
7.折臂油缸安装位置设计标准为,以其柱塞的伸缩能完成二层折臂所联动的切割系统的电动链锯的高度比一层摆臂延展1-5米高度为准。
8.所述的动力系统由内燃机、液压装置、发电机、电控箱和传动部件组成,内燃机输出动力除皮带传动供给行走系统外,转换为两套动力输出,一是液压输出,二是电力输出;液压输出线路为,内燃机通过皮带带动液压泵,驱动由液压油箱、液压泵、溢流阀系列组件组成液压回路运行,驱动摆臂油缸、折臂油缸和切割臂油缸,完成一层摆臂、二层折臂和切割臂的升降、折叠和切割臂的切割动作;电力输出线路为,内燃机通过皮带轮大小调节速比后,驱动发电机,再经过电控箱内的稳压装置、系列开关完成符合要求的电力输出,驱动转台、旋转臂的旋转和电动链锯的锯断作业。
9.所述的行走系统由底盘装置和履带装置组成,由内燃机提供动力,驱动底盘装置的变速箱系列传动机构,将动力传递到履带装置的橡胶履带上,设置一变速箱分动器,用以控制使得两侧履带之间产生速度差,从而完成转向;设置多级变速箱的档位,通过变换档位实现前进、后退、快慢速度的行走动作控制。
10.所述的控制系统,采用液电一体化及远程控制的遥控系统,设置液压控制ecu控制器和远程遥控装置,通过无线电信号进行远程遥控,通过遥控器发出电信号,在行走系统、升降系统和切割系统终端配有接收器;液压部分通过信号转化,实现对液压电磁换向阀的三个不同位置进行变换,分别完成各路液压油缸伸出、缩进、停止系列动作,从而控制各个关节动作;电控部分动作通过无线电电信号对继电器进行控制,完成电路的开、闭,从而控制各个旋转电机的启停,从而达到控制设备的效果。
11.本实用新型具有以下有益效果:(1)能在林果树行之间远离机器主体遥控控制各种操作,实现树枝的定向剪除,有效避免剪下来的树枝砸伤人,作业安全;(2)所有动作包括行走、升降、切割都由内燃机提供动力,不额外增加动力来源;(3)一人即可完成全部作业,且无需登高作业,提高了修剪速度,生产效率大大提高并减轻了劳动强度和改善了户外作业的舒适度。
附图说明
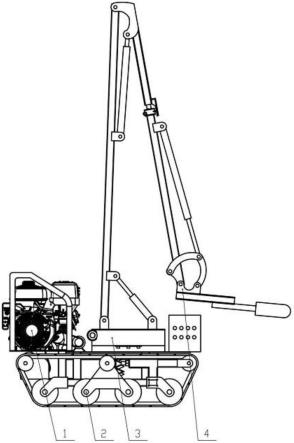
12.图1本实用新型总体结构示意图
13.图2本实用新型升降系统、切割系统结构示意图
14.图3本实用新型遥控接收器线路示意图
15.附图标记:动力系统1;行走系统2;升降系统3,其中转台:3-1,一层摆臂3-2,摆臂油缸1-3,折臂油缸3-4,二层折臂3-5;切割系统4,其中:旋转臂转动机构4-1,旋转臂4-2,切割臂油缸4-3,切割臂4-4,电动链锯4-5,四连杆机构4-6。
具体实施方式
16.实施例:如图1所示,一种遥控自走式多杆升降果树修剪机由动力系统1、行走系统2、升降系统3、切割系统4和控制系统组成,通过控制系统进行远程遥控控制。动力系统1由内燃机提供动力,通过皮带连接发电机机及液压泵提供电力及液压输出,驱动升降系统3各部分液压件工作,以及电力驱动电动链锯4-6运转,从而完成锯断树枝作业。
17.行走系统2也是由动力系统1的内燃机提供动力,通过皮带连接变速箱传递动力,通过遥控装置遥控两边履带的启停,实现行走系统的转向、前进、后退等不同的行走动作。
18.升降系统3由以下部分组成:转台3-1、转台底座(图中未标号)、一层摆臂3-2、摆臂油缸3-3、折臂油缸3-4、二层折臂3-5。转台3-1可以带动整个升降系统做360
°
旋转(左右各180
°
旋转)。转台底座上设置水平滑轨,转台3-1还可在行走系统不动的情况下做一定距离的水平移动,避免在近距离频繁启动行走系统。当选择出合适的切割位置后,一层摆臂3-2在摆臂油缸3-3的推动下,可沿中间位置做30
°
的摆动,其目的也是在垂直方向微调切割位置,二层折臂3-5在折臂油缸3-4的推动下带动切割臂4-4做高度位置的调整,其调整范围设定在1米到5米之间。
19.切割系统4由旋转臂转动机构4-1、旋转臂4-2、切割臂油缸4-3、切割臂4-4、电动链
锯4-5及四连杆机构4-6组成。旋转臂转动机构4-1在电机驱动下带动旋转臂4-2旋转,从而适应不同角度生长的树枝,使电动链锯4-5可以改变切割角度,当完成角度调整后,切割臂油缸4-3伸缩,将切割臂4-4下压和抬起,电动链锯4-5完成切割树枝作业。
20.控制系统具体操作如下,在遥控器端配有16路控制按键,分别按:一号按键电动链锯开启并保持锁定,二号按键电动链锯停止并保持锁定,三号按键旋转臂顺时针转动松开即停止,四号按键旋转臂逆时针转动松开即停止,五号按键转台底座顺时针旋转松开即停止,六号按键转台底座逆时针旋转松开即停止,七号按键切割臂油缸柱塞伸出切割臂下压松开即停止,八号按键切割臂油缸柱塞缩回切割臂上抬松开即停止,九号按键折臂油缸柱塞伸出折臂上抬松开即停止,十号按键折臂油缸柱塞缩回折臂下压松开即停止,十一号按键摆臂油缸推动摆臂上扬松开即停止,十二号按键摆臂油缸拉动摆臂下压松开即停止,十三号按键按下行走系统左边离合器分离,失去动力整机向左转向,松开按键动力结合继续向前行走,十四号按键按下右边离合器分离,失去动力整机向右转向,松开按键动力结合继续向前行走,十五号按键按下油门拉线放松,油门减小,长按到底熄火,十六号按键按下油门线拉紧,油门加大。控制装置的接收端线路图如图3所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1