一种基于无人机的松塔采摘器的制作方法
1.本实用新型涉及林业种植技术领域,具体涉及一种基于无人机的松塔采摘器。
背景技术:
2.松塔是一种成簇生长的林木球果,成熟后具有极高的药用价值和营养价值。松树树高 15-20米,冠幅2-5m,松塔生长在松树树梢位置,由于松塔果柄木质化程度高,果实分离力大,松树枝条韧性强等问题,导致松果采摘过程中出现采摘失败的情况。
3.目前松果采摘绝大部分还是以人工采摘为主,采摘作业比较复杂,松树很高,地形陡峭,人工进行高空采摘松果十分危险,采摘作业效率低、劳动量大,果农采摘比及时会导致经济损失,因此亟需提供一种松塔采摘器。
技术实现要素:
4.本发明的目的是为了解决现有技术中松果采摘绝大部分还是以人工采摘为主,采摘作业比较复杂,松树很高,地形陡峭,人工进行高空采摘松果十分危险,采摘作业效率低、劳动量大的问题,进而提供一种基于无人机的松塔采摘器。
5.本实用新型为解决上述问题采取的技术方案是:一种基于无人机的松塔采摘器,包括偏振机构、调节杆、固定杆、左振动板和右振动板;所述松塔采摘通过绳索悬吊在无人机下方,所述绳索远离无人机的一端连接固定杆,所述左振动板和所述右振动板分别设置在固定杆的左右两侧,所述左振动板和所述右振动板的一端均和固定杆转动连接,所述偏振机构的壳体连接在左振动板靠近固定杆的一端下部,所述偏振机构的曲柄轴连接在右振动板的上部,所述绳索和所述固定杆间设置有调节杆。
6.进一步地,所述偏振机构还包括连接在壳体上的电机、偏心轮和连杆;所述偏心轮连接在电机的输出轴上,所述连杆的一端连接偏心轮,另一端连接曲柄轴,所述曲柄轴伸出到偏振机构壳体外部且与偏振机构壳体滑动连接。
7.进一步地,所述左振动板靠近固定杆的一端连接有多个左辅助杆,所述右振动板靠近固定杆的一端连接有多个右辅助杆,所述左辅助杆和所述右辅助杆相互交错设置。
8.进一步地,所述左振动板和所述右振动板间的活动夹角r为30
°‑
60
°
。
9.进一步地,所述左振动板和所述右振动板均由多个水平和竖直交错的杆子连接而成,所述杆子由铝合金或碳纤维制成。
10.进一步地,所述左振动板和所述右振动板的左右两端均连接有多个伸缩杆。
11.进一步地,所述松塔采摘器还包括安装在无人机上的控制系统,所述控制系统包括图像传输系统、前后雷达和仿地雷达,用于控制无人机的整体高度能够识别出松塔的位置。
12.进一步地,所述无人机为四旋翼无人机或六旋翼无人机,所述无人机采用两冲程汽油机为动力。
13.本实用新型具有以下有益技术效果:
14.本实用新型通过无人机悬挂升起至松树上方,启动偏振机构中的电机,偏心轮通过连杆带动曲柄轴往复伸缩运动,曲柄轴带动左振动板绕着固定杆转动,同时偏振机构由于偏心轮的运动壳体产生振动效果,壳体连接在右振动板上,进而带动右振动板也绕着固定杆转动,拍打松树树枝,通过振动树枝来使树枝上的松塔掉落,实现采摘工作,减轻人工采摘的劳动压力,提高采摘效率。
15.本实用新型可进行较高和距离树木主干较远的松塔采摘,通过无人机的图像传输系统,遥控器显示的画面控制无人机位置,前后雷达测障碍和仿地雷达监控高度确定松塔的位置,适用于呈现高度非结构化的东北林地结构,通过无人机悬吊作业能够适用于地形复杂,茂密树林等多种情况。本实用新型采用的左振动板和右振动板可绕着固定杆折叠,设备体积小,容易携带,减轻采摘人员的负担。
附图说明
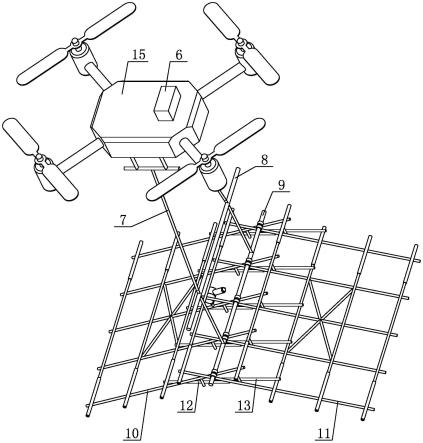
16.图1是本实用新型吊装在无人机上的结构示意图;
17.图2是本实用新型的斜轴测示意图;
18.图3是本实用新型的等轴测示意图;
19.图4是本实用新型的主视图;
20.图5是本实用新型的俯视图;
21.图6是本实用新型的左视图;
22.图7是偏振机构的结构示意图;
23.图中:1、电机;2、偏心轮;3、连杆;4、曲柄轴;5、壳体;6、控制系统;7、绳索;8、调节杆;9、固定杆;10、左振动板;11、右振动板;12、左辅助杆;13、右辅助杆;14、伸缩杆;15、无人机。
具体实施方式
24.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合说明书附图及实施例,对本实用新型进行进一步详细说明,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
25.具体实施方式一:结合图1至图7说明本实施方式,本实施方式所述一种基于无人机的松塔采摘器,包括偏振机构、调节杆8、固定杆9、左振动板10和右振动板11;所述松塔采摘通过绳索7悬吊在无人机15下方,所述绳索7远离无人机15的一端连接固定杆 9,所述左振动板10和所述右振动板11分别设置在固定杆9的左右两侧,所述左振动板 10和所述右振动板11的一端均和固定杆9转动连接,所述偏振机构的壳体5连接在左振动板10靠近固定杆9的一端下部,所述偏振机构的曲柄轴4连接在右振动板11的上部,所述绳索7和所述固定杆9间设置有调节杆8。
26.具体实施方式二:结合图1至图7说明本实施方式,本实施方式所述偏振机构还包括连接在壳体5上的电机1、偏心轮2和连杆3;所述偏心轮2连接在电机1的输出轴上,所述连杆3的一端连接偏心轮2,另一端连接曲柄轴4,所述曲柄轴4伸出到偏振机构壳体5外部且与偏振机构壳体5滑动连接。
27.本实施例中左振动板10和右振动板11的反复绕轴运动的动力由偏振机构提供,偏
心轮2通过连杆3带动曲柄轴4往复伸缩运动,曲柄轴4带动左振动板10绕着固定杆9转动,同时偏振机构由于偏心轮2的运动壳体5产生振动效果,壳体5连接在右振动板11 上,进而带动右振动板11也绕着固定杆9转动。
28.其它组成及连接关系与具体实施方式一相同。
29.具体实施方式三:结合图1至图7说明本实施方式,本实施方式所述左振动板10靠近固定杆9的一端连接有多个左辅助杆12,所述右振动板11靠近固定杆9的一端连接有多个右辅助杆13,所述左辅助杆12和所述右辅助杆13相互交错设置。
30.本实施例中左振动板10和右振动板11均由多个水平和竖直交错的杆子连接而成,所述杆子由铝合金或碳纤维制成,杆子间通过焊接或者绳索捆扎固定,左振动板10和右振动板11靠近固定杆9的一端均连接有多个右辅助杆13,左辅助杆12和右辅助杆13相互交错设置起到辅助振动拍打树枝作用。
31.其它组成及连接关系与具体实施方式一相同。
32.具体实施方式四:结合图1至图7说明本实施方式,本实施方式所述左振动板10和所述右振动板11间的活动夹角r为30
°‑
60
°
。
33.本实施例中左振动板10和右振动板11间的活动夹角由偏振机构中曲柄轴4的预设位置决定,左振动板10和右振动板11间的活动夹角r限制为30
°‑
60
°
时,振动拍打树枝的效果最佳。
34.其它组成及连接关系与具体实施一相同。
35.具体实施方式五:结合图1至图7说明本实施方式所述左振动板10和所述右振动板 11均由多个水平和竖直交错的杆子连接而成,所述杆子由铝合金或碳纤维制成,杆子间通过焊接或者绳索捆扎固定。
36.本实施例中左振动板10和右振动板11均由铝合金或碳纤维的杆子制成,其中铝合金密度低、力学性能佳、加工性能好、无毒、易回收、导电性、传热性及抗腐蚀性能优良等特点,在船飞行器运输领域广泛使用;碳纤维碳具有耐高温、抗摩擦、导热及耐腐蚀等特性,碳纤维的密度小,因此比强度和比模量高。碳纤维增强环氧树脂复合材料,其比强度及比模量在现有工程材料中是最高的。综上所述左振动板10和右振动板11均由铝合金或碳纤维的杆子制成有效减轻无人机的负载重量。
37.其它组成及连接关系与具体实施一相同。
38.具体实施方式六:结合图1至图6说明本实施方式,本实施方式所述左振动板10和所述右振动板11的左右两端均连接有多个伸缩杆14。
39.本实施例中左振动板10和右振动板11的左右两端均连接有多个伸缩杆14,当振动效果不佳或者树木面积过宽,可将伸缩杆14拉伸并固定,振打树枝面积范围广泛,伸缩杆14也采用铝合金或碳纤维制成
40.其它组成及连接关系与具体实施一相同。
41.具体实施方式七:结合图1至图7说明本实施方式,本实施方式所述松塔采摘器还包括安装在无人机15上的控制系统6,所述控制系统6包括图像传输系统、前后雷达和仿地雷达,用于控制无人机15的整体高度能够识别出松塔的位置。
42.本实施例中无人机飞到树上以后通过无人机的图像传输系统或者加装图传系统,遥控器显示的画面控制无人机位置,飞无人机上装前后雷达测障碍和仿地雷达监控高度;
优选采用的是植保混动无人机传输前方的图像和下方的图像gps定位,前后雷达和仿地雷达无人机里有主控,控制平衡和电机和遥控器接收机通过无线电用遥控器操作。本实用新型控制系统6采用的图像传输系统、前后雷达和仿地雷达均为现有电器元件,型号采用通用标准件或本领域技术人员知晓的部件、其结构和原理都为本技术人员均可通过技术手册得知,本实用新型的无人机控制程序为现有计算机程序,不涉及对软件程序的创新。
43.其它组成及连接关系与具体实施一相同。
44.具体实施方式八:结合图1至图7说明本实施方式,本实施方式所述无人机15为四旋翼无人机或六旋翼无人机,所述无人机15采用两冲程汽油机为动力。
45.本实施例中无人机15优选为四旋翼无人机或六旋翼无人机,多旋翼无人机其通过每个轴上的电动机转动带动旋翼,产生升推力。通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运行轨迹。无人机15采用两冲程汽油机为动力,汽油机燃油采用混合油,汽油加机油,油动无人机具有较好的抗风能力,载重大,续航能力强。
46.其它组成及连接关系与具体实施一相同。
47.本实用新型的工作原理:
48.本实用新型在工作时首先无人机15将松塔采摘器悬挂升起至松树上方,通过无人机的图像传输系统,遥控器显示的画面控制无人机位置,前后雷达测障碍和仿地雷达监控高度确定松塔的位置,启动偏振机构中的电机1,偏心轮2通过连杆3带动曲柄轴4往复伸缩运动,曲柄轴4带动左振动板10绕着固定杆9转动,同时偏振机构由于偏心轮2的运动壳体5产生振动效果,壳体5连接在右振动板11上,进而带动右振动板11也绕着固定杆9转动。拍打松树树枝,通过振动树枝来使树枝上的松塔掉落,实现采摘工作。
49.上述所述实施例仅是优选和示例形的,不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1