动物监视系统、动物监视服务器、动物监视方法以及动物监视程序与流程
本发明涉及动物监视系统、动物监视服务器、动物监视方法以及动物监视程序。本发明特别是涉及一种能够远程监视宠物等的监视对象动物的动物监视系统、动物监视服务器、动物监视方法以及动物监视程序。
背景技术:
1、近年来,远程监视宠物等的动物的行动的宠物监护服务的使用正在普及。当使用这样的服务时,例如,用户能够掌握饲主等的用户的眼睛无法到达的地方的宠物的运动、排泄、睡眠状态等,对宠物的健康管理有用。
2、在过去,已知有下述的看护装置,该看护装置涉及特定看护对象的状态的看护装置,该看护装置包括:获得机构,该获得机构获得成为检测对象的看护对象的动作的检测结果和该看护对象所在的当前场所或当前时刻;检索机构,该检索机构通过参照存储机构来检索:与由获得机构获得的检测结果相对应的检测动作内容且与由获得机构获得的当前场所或当前时刻相对应的识别信息,上述存储机构按照看护对象的种类而将识别该种类的看护对象中的多个状态的识别信息与该看护对象的检测动作内容和该看护对象所在的场所或该动作的时间段相关联地存储;特定机构,该特定机构将由检索机构检索到的识别信息特定为看护对象的当前状态(例如,参照专利文献1)。按照专利文献1所记载的看护装置,能够学习看护对象的动作,不论是何种看护对象,都能够更准确地通知各种状态。
3、现有技术文献
4、专利文献
5、专利文献1:jp特开2017-068856号公报
技术实现思路
1、发明要解决的课题
2、然而,在专利文献1所记载的监护装置中,在监护宠物等的动物的日常的细微动作的场合,除了加速度传感器以外,还需要陀螺仪传感器等的其他多种多样的传感器。因此,在对宠物等的动作进行更高精度的动作判定的场合,存在各传感器的电力消耗变大的情况。
3、因此,本发明的目的在于提供一种动物监视系统、动物监视服务器、动物监视方法以及动物监视程序,其能够在抑制电力消耗的同时高精度地观察监视对象动物的行动。
4、用于解决课题的技术方案
5、为了实现上述目的,本发明提供一种动物监视系统,该动物监视系统对监视对象动物进行监视的动物监视系统,该动物监视系统包括:动作检测部,该动作检测部安装于监视对象动物,检测监视对象动物的动作信息;行动推定部,该行动推定部根据动作检测部所检测的动作信息来推定监视对象动物的行动;以及节电控制部,该节电控制部在行动推定部推定为监视对象动物的行动处于不活跃状态时开始进行抑制动作检测部中的耗电量的控制。
6、发明的效果
7、按照本发明的动物监视系统、动物监视服务器、动物监视方法以及动物监视程序,能够提供一种动物监视系统、动物监视服务器、动物监视方法以及动物监视程序,能够在抑制电力消耗的同时高精度地观察监视对象动物的行动。
技术特征:
1.一种动物监视系统,该动物监视系统为对监视对象动物进行监视的动物监视系统,该动物监视系统包括:
2.根据权利要求1所述的动物监视系统,其中,上述不活跃状态是上述监视对象动物静止的状态。
3.根据权利要求1或2所述的动物监视系统,其中,上述行动推定部采用行动推定模型,该行动推定模型中,将表示监视对象动物的动作的动作信息、和表示与上述动作对应的监视对象动物的行动的行动信息的组合作为行动训练数据来接收,通过基于上述行动训练数据的机器学习,从上述监视对象动物的动作信息输出表示该监视对象动物的行动的行动信息,
4.根据权利要求1~3中任一项所述的动物监视系统,其中,上述动作检测部具有3轴加速度传感器、3轴陀螺仪传感器以及3轴地磁传感器;
5.根据权利要求4所述的动物监视系统,其中,上述节电控制部通过下述方式抑制上述电力消耗,该方式为,上述3轴加速度传感器、上述3轴陀螺仪传感器或上述3轴地磁传感器的动作的停止;以及将上述3轴加速度传感器、上述3轴陀螺仪传感器及上述3轴地磁传感器中至少一个的采样频率变更为预定的采样频率。
6.一种动物监视服务器,该动物监视服务器为对监视对象动物进行监视的动物监视服务器,该动物监视服务器包括:
7.一种动物监视方法,该动物监视方法为对监视对象动物进行监视的动物监视系统中的动物监视方法,该动物监视方法包括:
8.一种动物监视程序,该动物监视程序为对监视对象动物进行监视的动物监视系统用的动物监视程序,其中,使计算机实现下述的功能:
技术总结
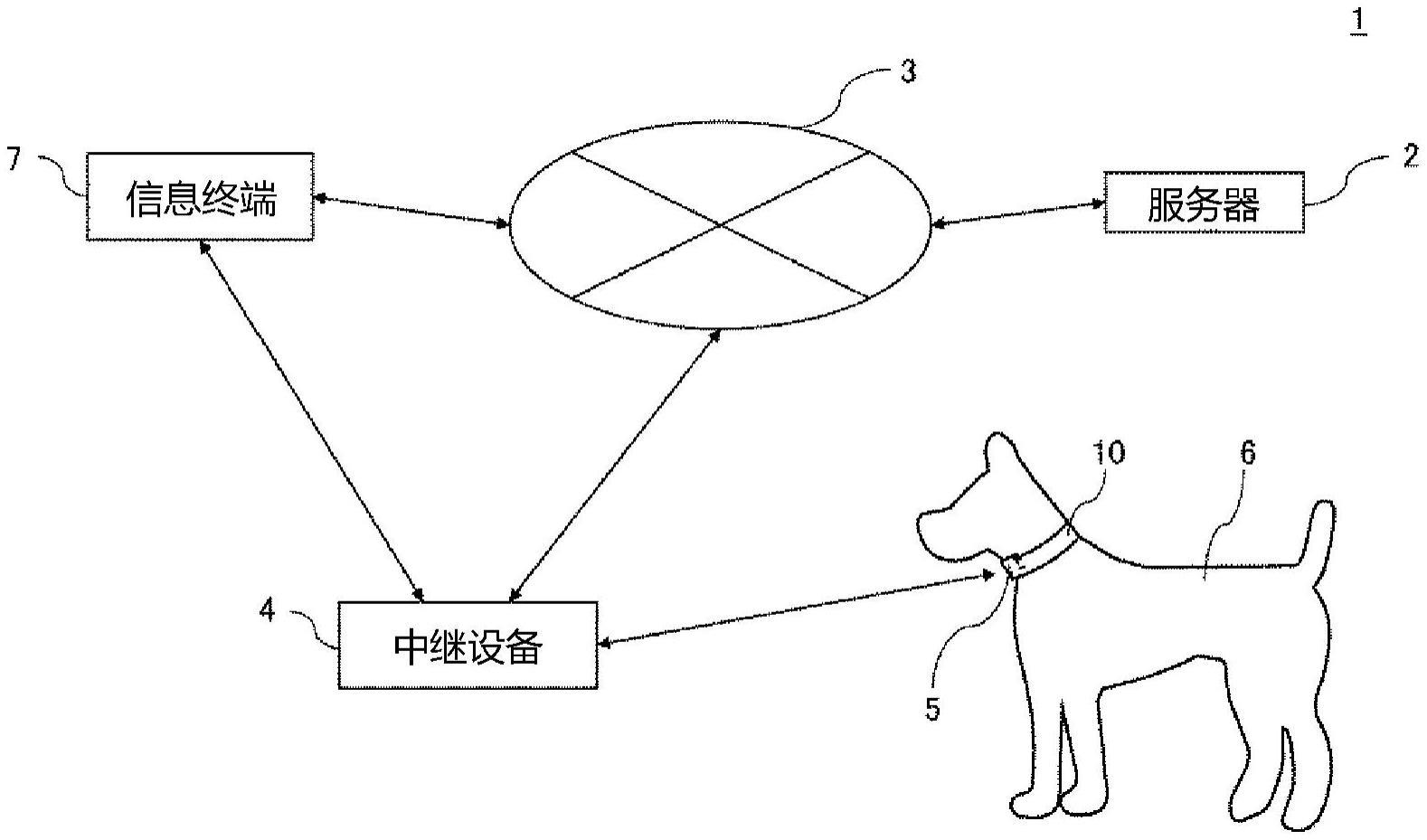
提供一种动物监视系统,动物监视服务器,动物监视方法以及动物监视程序,其能够在抑制电力消耗的同时高精度地观察监视对象动物的行动。对监视对象动物(6)进行监视的动物监视系统(1)包括:动作检测部(502),该动作检测部(502)安装于监视对象动物(6),检测监视对象动物(6)的动作信息;行动推定部(212),该行动推定部(212)根据动作检测部(502)所检测的动作信息来推定监视对象动物(6)的行动;节电控制部(508),该节电控制部(508)在行动推定部(212)推定为监视对象动物(6)的行动处于不活跃状态时开始抑制动作检测部(502)中的电力消耗的控制。
技术研发人员:深田笃,大城启吾
受保护的技术使用者:株式会社宠音
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!