基于移动式灌溉系统的精准决策与灌溉的精准控制方法
本发明涉及智慧农林业领域,具体为基于移动式灌溉系统的精准决策与灌溉的精准控制方法。
背景技术:
1、创新农业生产方式,以自动化代替传统手工作业的形式,将智能化科技带到农业当中是未来科技发展的必经之路。传统移动式灌溉装置的灌溉形式多为大面积喷洒,忽略了对于作物的准确定位,使得多数水肥资源渗入土壤,营养物质流失,不仅增加了培养开支,也影响了生态环境,如何利用创新发明提高农业灌溉装置的水资源,肥料与药物的利用率和对于灌溉主体的流体冲击力的把控是当下亟待解决的问题。
2、针对上述问题,现有公开的专利有应对策略,如《一种智能温室大棚移动式精准灌溉机器人》(公布号cn113424735a)主要是对已浇灌的土壤周围识别,采集土壤照片实现精准灌溉。但是并未有对于当前区域内作物的历史灌溉情况的捕捉分析。
3、《一种多通道移动式果园灌溉施肥机及灌溉施肥方法》,(公布号cn113179733a)主要是对精准控制肥料配比和施肥配方的控制。由上述可见,目前专利创新技术中多数是以土壤与作物生长情况,创新水肥配比为主,少有通过优化灌溉决策与灌溉喷头跟踪以实现水肥与药分类移动施灌相关方面的技术研究。
4、因此目前现有的精准识别技术大多都偏向于合理的水肥配比和土壤识别,其缺点在于并未准确的识别不同生长期的果实的具体位置和具体精准喷灌的施灌点与具体决策模型的技术,容易出现过量灌溉或灌溉资源浪费的现象。其难点在于灌溉模型的合理化构建和喷灌机构的精准化位移。随着智慧农机和大数据技术的发展,新时代农业灌溉应与喷灌机构的精准定位,喷灌方法的精准决策相结合,提升灌溉水平,为此我们提出了基于移动式灌溉系统的精准决策与灌溉的精准控制方法。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了基于移动式灌溉系统的精准决策与灌溉的精准控制方法,解决当前水肥一体化移动装置在实施喷灌时水肥资源难以准确灌溉至指定作物而造成浪费水肥资源,在移动设备作业中无法同时兼顾施肥与施药,同时忽略各个作物群受灌时受到的灌溉冲击力对作物影响的问题。通过引入智慧灌溉系统参与决策,视觉检测及作业区域中传感器获取实时样本数据,单片机控制电机机构群协同实施灌溉系统中的决策方案,返回已灌数据和当前区域作物群的各项生长指数,以达到提升水肥资源利用率和药物利用率的效果。
3、(二)技术方案
4、为实现上述所述目的,本发明提供如下技术方案:基于移动式灌溉系统的精准决策与灌溉的精准控制方法,包括以下步骤:
5、第一步:装置开启预处理;
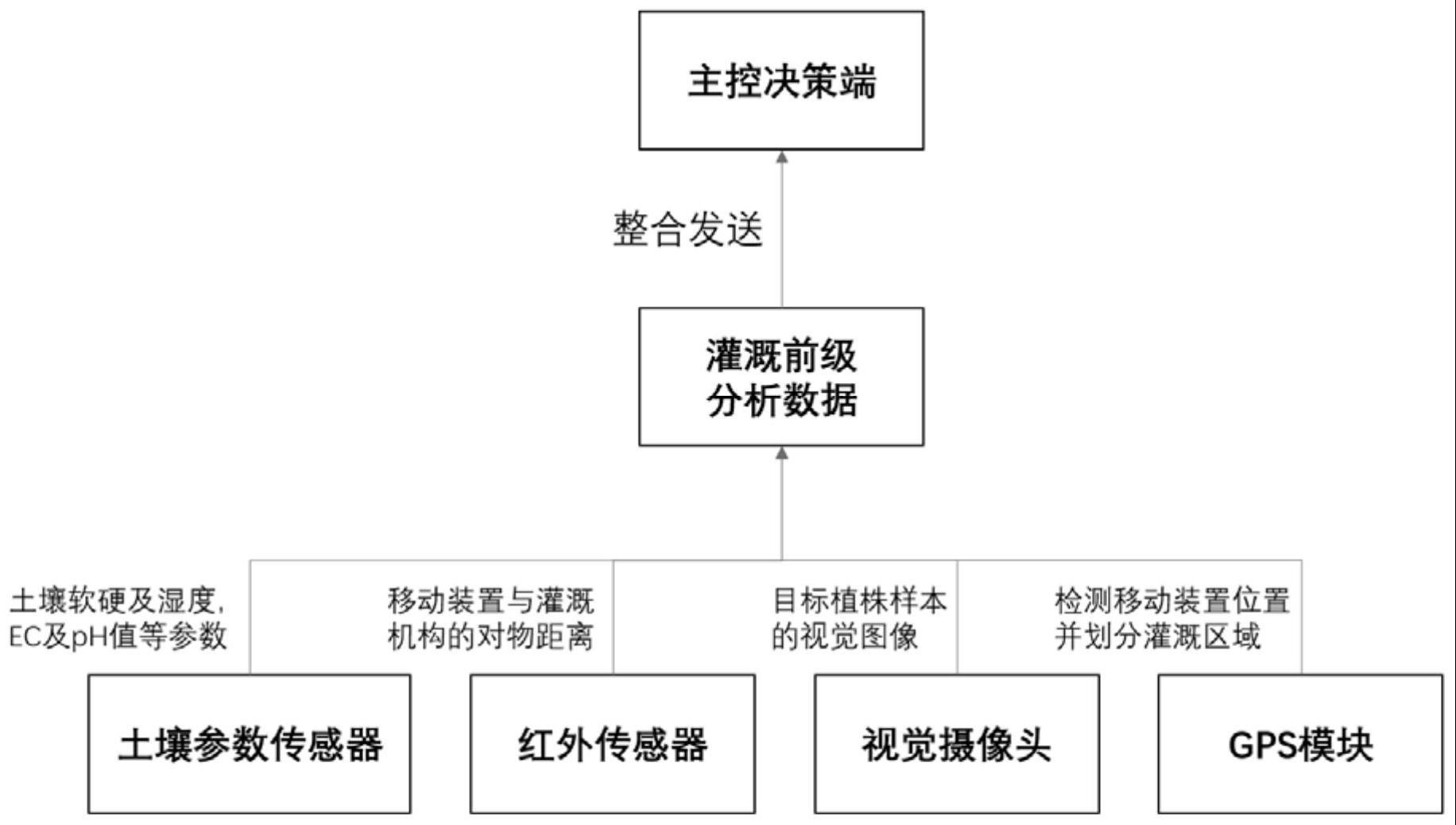
6、第二步:传感器模块收集环境信息并构建当前作物生长情况模型;
7、第三步:主控端处理图像信息和自然环境数据;
8、第四步:硬件执行端根据主控与智慧灌溉系统共同决策跟踪样本目标;
9、第五步:施灌作业数据传回智慧灌溉系统执行分析操作,构建未来作物生长模型供用户操作。
10、优选的,所述第一步中预处理的内容如下:整机上电后主控端和用户端处智慧灌溉系统初始化,上下位机与传感器端进行与扫描与预处理,射灌机构预灌溉,保障机构内流通行径的畅通,确保装置作业过程中各单位运行正常。
11、优选的,所述第二步的具体内容为:传感器通过摄像头模块与测距模块测量装置与目标作物的实时距离,作物目前生长数据通过帧格式打包传输,主控板将对传输信息根据预设编码表分类处理所得数据。
12、优选的,所述第三步的具体内容为:主控端接收图像,对于具体图像数据,采用“rgb模型”与“hsv模型”和“边缘像素采集”方式实时处理,演算结果其中包括“样本距离”、“样本情况”以及“样本周边环境”,基于循环神经网络,关联该区域在时间跨度上的变化,构建实时样本生长高度,生长状态等数据曲线,打包样本数据并传输回用户控制的智慧灌溉系统端;
13、同时将样本位置及装置相对作物位置等物理数据根据模糊自适应pid演算并查询模拟推理表,解模糊得到相关迫近所需的位移参数,再将表中目标移动数值传输于下位硬件执行端。
14、优选的,所述第四步的具体内容为:获得实时信号与数据后,硬件执行端将迫近作物样本并开始作业,上端三向施灌结构将配合药物配比方案实施果实端喷灌,下端三向施灌结构将配合水肥配比方案实施根茎端喷灌,实时喷灌量,喷灌机构将实时数据均返回于用户层面操控的智慧灌溉系统。
15、优选的,所述第五步的具体内容为:当区域内灌溉作业完成后,灌溉设备将传回当前区域内的作业情况,通过智慧灌溉系统端的算法决策优化方案,基于神经网络算法构建作物生长高度,病状等综合状态在时间维度上的历史变化与未来变化,同时通过各区域的生长模型曲线与农林大数据中相关植株的生活条件与习性相结合,结算出当期各个片区最适环境所需的用户层面可调节的自然条件。
16、(三)有益效果
17、与现有技术相比,本发明提供了基于移动式灌溉系统的精准决策与灌溉的精准控制方法,具备以下有益效果:
18、1、该基于移动式灌溉系统的精准决策与灌溉的精准控制方法,结合水肥药协同作业的控制模型优选地执行自适应灌溉操作。这是由于本发明中水肥药上下位三向控制机构基于视觉与模糊自适应pid算法达到精确位移,位移主体通过此项优化方案,能够稳定且迅速的迫近样本,控制对作物样本间距,合理地弥补传统灌溉对于灌溉主体与受灌物距离把控的不足。
19、2、该基于移动式灌溉系统的精准决策与灌溉的精准控制方法,合理地根据水肥重量对流体的喷灌速度的影响改变流体压强进而优化其对植株的冲击影响。这是由于本发明中基于演算流体重量与流体喷射方向对于目标土壤灌溉点的冲击力度和药物对目标果实的耐压度及精准度,及时调整灌溉流体压强或喷射端管口结构,优化了移动端实时灌溉时对于灌溉主体的冲击力把控。
20、3、该基于移动式灌溉系统的精准决策与灌溉的精准控制方法,构建有关优化作物水肥药生长所需的智慧灌溉系统模型高效地深化作物整体的可控性。这是由于本发明中所使用的用户层所控智慧灌溉系统基于循环神经网络对于决策方的优化,基于历史灌溉经验与已灌溉的水肥药曲线,结合实时情况,寻找最优灌溉量,呈现所灌地区的整体灌溉分布和各区域灌溉程度及未来生长曲线,增强主控决策的合理性与实用性。
技术特征:
1.基于移动式灌溉系统的精准决策与灌溉的精准控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于移动式灌溉系统的精准决策与灌溉的精准控制方法,其特征在于:所述第一步中预处理的内容如下:整机上电后主控端和用户端处智慧灌溉系统初始化,上下位机与传感器端进行与扫描与预处理,射灌机构预灌溉,保障机构内流通行径的畅通,确保装置作业过程中各单位运行正常。
3.根据权利要求1所述的基于移动式灌溉系统的精准决策与灌溉的精准控制方法,其特征在于:所述第二步的具体内容为:传感器通过摄像头模块与测距模块测量装置与目标作物的实时距离,作物目前生长数据通过帧格式打包传输,主控板将对传输信息根据预设编码表分类处理所得数据。
4.根据权利要求1所述的基于移动式灌溉系统的精准决策与灌溉的精准控制方法,其特征在于:所述第三步的具体内容为:主控端接收图像,对于具体图像数据,采用“rgb模型”与“hsv模型”和“边缘像素采集”方式实时处理,演算结果其中包括“样本距离”、“样本情况”以及“样本周边环境”,基于循环神经网络,关联该区域在时间跨度上的变化,构建实时样本生长高度,生长状态等数据曲线,打包样本数据并传输回用户控制的智慧灌溉系统端;
5.根据权利要求1所述的基于移动式灌溉系统的精准决策与灌溉的精准控制方法,其特征在于:所述第四步的具体内容为:获得实时信号与数据后,硬件执行端将迫近作物样本并开始作业,上端三向施灌结构将配合药物配比方案实施果实端喷灌,下端三向施灌结构将配合水肥配比方案实施根茎端喷灌,实时喷灌量,喷灌机构将实时数据均返回于用户层面操控的智慧灌溉系统。
6.根据权利要求1所述的基于移动式灌溉系统的精准决策与灌溉的精准控制方法,其特征在于:所述第五步的具体内容为:当区域内灌溉作业完成后,灌溉设备将传回当前区域内的作业情况,通过智慧灌溉系统端的算法决策优化方案,基于神经网络算法构建作物生长高度,病状等综合状态在时间维度上的历史变化与未来变化,同时通过各区域的生长模型曲线与农林大数据中相关植株的生活条件与习性相结合,结算出当期各个片区最适环境所需的用户层面可调节的自然条件。
技术总结
本发明涉及智慧农林业领域,且公开了基于移动式灌溉系统的精准决策与灌溉的精准控制方法,包括以下步骤:第一步:装置开启预处理;第二步:传感器模块收集环境信息并构建当前作物生长情况模型;第三步:主控端处理图像信息和自然环境数据;第四步:硬件执行端根据主控与智慧灌溉系统共同决策跟踪样本目标;第五步:施灌作业数据传回智慧灌溉系统执行分析操作,构建未来作物生长模型供用户操。
技术研发人员:唐睿智,陈鑫浩,林海,李思道,郑伟杰,李扬翊,王奕博,李小语,李可,张忠林
受保护的技术使用者:广州大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!