基于数据分析的无人驾驶收割机控制方法及系统与流程
本发明涉及收割机控制,尤其涉及一种基于数据分析的无人驾驶收割机控制方法及系统。
背景技术:
1、农业是国民经济的基础,现代农业装备是现代农业的重要支撑。作为精准农业的一项核心技术,农业机械化广泛应用于农业生产过程。例如,作为农业生产过程的关键性环节——农作物收割,其具有收割速度较慢、工作环境简单等特点,作业具有重复性,因此,针对农作物收割产生了农业收割机。农作物收割机需要驾驶人员在收割机驾驶舱内进行现场操作,长时间的人工操作不仅会使驾驶员疲惫,影响作业效率,而且还会造成驾驶员注意力不集中,容易在现场发生机械伤人事故;同时,需要人工驾驶的收割机在进行大面积的农作物收割工作时,由于驾驶员在农田里观察的距离有限,有时会发生漏割农作物的生产事故。针对上述问题,无人驾驶收割机技术逐渐发展起来。
2、但是,目前对无人驾驶收割机的控制技术仍然存在一些弊端,例如,无法准确控制无人驾驶收割机的收割路线,导致收割时会出现一些小范围内漏收现象;控制无人驾驶收割机时缺乏有效的监察,在出现机械问题时,无法进行及时的问题反馈,从而导致无人驾驶收割机的农作物收集产量不稳定以及效率较低。因此,如何提高无人驾驶收割机的控制技术成为了亟待解决的问题。
技术实现思路
1、本发明提供一种基于数据分析的无人驾驶收割机控制方法及系统,其主要目的在于解决如何提高无人驾驶收割机的控制技术的问题。
2、为实现上述目的,本发明提供的一种基于数据分析的无人驾驶收割机控制方法,包括:
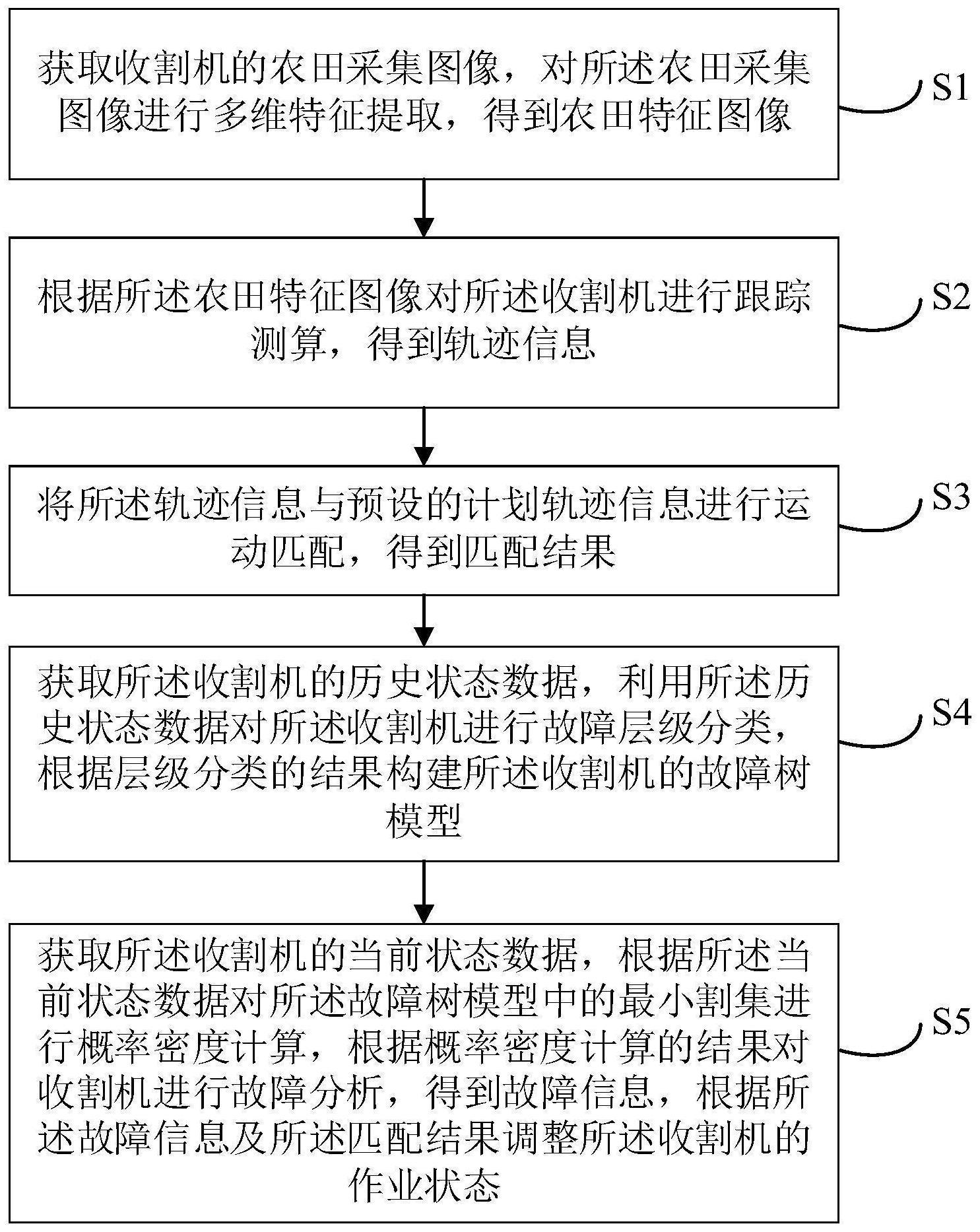
3、获取收割机的农田采集图像,对所述农田采集图像进行多维特征提取,得到农田特征图像;
4、根据所述农田特征图像对所述收割机进行跟踪测算,得到轨迹信息;
5、将所述轨迹信息与预设的计划轨迹信息进行运动匹配,得到匹配结果;
6、获取所述收割机的历史状态数据,利用所述历史状态数据对所述收割机进行故障层级分类,根据层级分类的结果构建所述收割机的故障树模型;
7、获取所述收割机的当前状态数据,根据所述当前状态数据对所述故障树模型中的最小割集进行概率密度计算,根据概率密度计算的结果对收割机进行故障分析,得到故障信息,根据所述故障信息及所述匹配结果调整所述收割机的作业状态。
8、可选地,所述根据所述农田特征图像对所述收割机进行跟踪测算,得到轨迹信息,包括:
9、根据所述农田特征图像获取所述收割机的状态信息,将所述状态信息进行组合,得到状态参数;
10、利用所述状态参数及预设的滤波器计算所述收割机的估计状态值及估计状态协方差;
11、根据所述估计状态值及估计状态协方差对所述收割机进行状态测算,得到轨迹信息。
12、可选地,所述利用所述状态参数及预设的滤波器计算所述收割机的估计状态值及估计状态协方差,包括:
13、利用下式利用所述状态参数及预设的滤波器计算所述收割机的估计状态值及估计状态协方差:
14、fk=axk-1+bck-1
15、
16、其中,fk表示为所述收割机在k时刻的估计状态值;xk-1表示为所述收割机在k-1时刻的状态参数;b表示为所述滤波器的增益矩阵;ck-1表示为所述收割机在k-1时刻的运动噪声;dk表示为所述收割机在k时刻的估计状态协方差;a表示为所述滤波器输出的收割机的状态转移矩阵;表示为所述滤波器输出的收割机的状态转移矩阵的转置;dk表示为所述收割机在k时刻的估计状态协方差;dk-1表示为所述收割机在k-1时刻的估计状态协方差。
17、可选地,所述根据所述估计状态值及估计状态协方差对所述收割机进行状态测算,得到轨迹信息,包括:
18、根据所述估计状态值及估计状态协方差对所述收割机进行优化状态计算,得到优化状态值;
19、根据所述优化状态值计算所述收割机的轨迹,得到轨迹信息。
20、可选地,所述根据所述估计状态值及估计状态协方差对所述收割机进行优化状态计算,得到优化状态值,包括:
21、利用下式根据所述估计状态值及估计状态协方差对所述收割机进行优化状态计算:
22、
23、其中,gk表示所述收割机在k时刻的优化状态值;h表示为单位矩阵,dk-1表示为所述收割机在k-1时刻的估计状态协方差;dk表示为所述收割机在k时刻的估计状态协方差;i表示为与所述优化状态值的维度相等的单位矩阵;b表示为所述滤波器的增益矩阵;表示为所述滤波器的增益矩阵的转置;表示为转置符号。
24、可选地,所述将所述轨迹信息与预设的计划轨迹信息进行运动匹配,得到匹配结果,包括:
25、将所述轨迹信息与所述计划轨迹信息进行向量表示,得到与所述轨迹信息对应的第一表示向量及所述计划轨迹信息对应的第二表示向量;
26、计算所述第一表示向量与所述第二表示向量之间的距离;
27、利用下式计算所述第一表示向量与所述第二表示向量之间的距离:
28、
29、其中,o表示为所述第一向量与所述第二向量之间的距离;表示为所述第一向量α与所述第二向量β构成的矩阵的转置;d-1表示所述收割机的估计状态协方差的倒数;[α,β]表示为所述第一向量α与所述第二向量β构成的矩阵;表示为转置符号;
30、根据所述距离对所述第一表示向量与所述第二表示向量进行相似性检验,根据相似性检验的结果生成匹配结果;
31、利用下式根据所述距离对所述第一表示向量与所述第二表示向量进行相似性检验:
32、
33、其中,sim(α,β)表示为所述第一向量α与所述第二向量β之间的相似值;o表示为所述第一向量与所述第二向量之间的距离。
34、可选地,所述对所述农田采集图像进行多维特征提取,得到农田特征图像,包括:
35、将所述农田采集图像进行图像转换,得到多个初始特征图像;
36、对所述初始特征图像进行特征拼接,得到特征拼接图像;
37、将所述特征拼接图像进行特征重构,得到所述农田特征图像。
38、可选地,所述利用所述历史状态数据对所述收割机进行故障层级分类,包括:
39、将所述历史状态数据中历史故障作为顶事件,所述历史故障对应的故障原因作为底事件;
40、根据所述底事件生成所述顶事件的最小割集,将所述最小割集作为故障层级分类的结果。
41、可选地,所述根据所述故障信息及所述匹配结果调整所述收割机的作业状态,包括:
42、根据所述故障信息生成维修指令,并利用所述维修指令对所述收割机进行故障维修;
43、根据所述匹配结果对所述收割机进行角度分析,根据角度分析的结果调整所述收割机的行驶路线。
44、为了解决上述问题,本发明还提供一种基于数据分析的无人驾驶收割机控制系统,所述系统包括:
45、图像特征提取模块,用于获取收割机的农田采集图像,对所述农田采集图像进行多维特征提取,得到农田特征图像;
46、跟踪测算模块,用于根据所述农田特征图像对所述收割机进行跟踪测算,得到轨迹信息;
47、运动匹配模块,用于将所述轨迹信息与预设的计划轨迹信息进行运动匹配,得到匹配结果;
48、故障树模型生成模块,用于获取所述收割机的历史状态数据,利用所述历史状态数据对所述收割机进行故障层级分类,根据层级分类的结果构建所述收割机的故障树模型;
49、作业状态调整模块,用于获取所述收割机的当前状态数据,根据所述当前状态数据对所述故障树模型中的最小割集进行概率密度计算,根据概率密度计算的结果对收割机进行故障分析,得到故障信息,根据所述故障信息及所述匹配结果调整所述收割机的作业状态。
50、本发明实施例通过对农田采集图像进行多维特征提取,得到农田特征图像,可以为收割机提供收割路线规划依据,提高收割的全面性;根据农田特征图像对收割机进行跟踪测算,得到轨迹信息,将轨迹信息与计划轨迹信息进行运动匹配可以实时监测收割机的收割路线,防止收割机出现轨迹偏移,避免出现农作物漏割现象;根据故障信息及匹配结果调整收割机的作业状态,可以及时检查收割机的作业状态是否正常,并获取故障信息及时进行故障修理,保持收割机的正常作业,从而保持农作物收集产量的稳定性。因此本发明提出的基于数据分析的无人驾驶收割机控制方法及系统,可以解决如何提高无人驾驶收割机的控制技术的问题。
- 还没有人留言评论。精彩留言会获得点赞!