一种农用无人机离心喷头间距调节控制方法与流程
本技术涉及无人机控制领域,更具体地,涉及一种农用无人机离心喷头间距调节控制方法。
背景技术:
1、农用无人机在农业喷洒方面具有广阔的应用前景,现常用于农作物保护、农作物营养调节等。农用无人机可进行精准喷洒,将化学药剂、营养剂等均匀地喷洒在作物表面,实现农作物保护,对农作物进行调节,降低损失率和增加产量。例如在果树、蔬菜、玉米、水稻等农作物上进行的病虫害的药剂喷洒;也可以喷洒液体肥料、微量元素以及其他激素等,以提高作物体质和生长效率。
2、大部分的无人机在喷洒作业过程中采用固定间距的喷头来实现农业作业。但是由于不同的农作物生长状态和生长环境的不同,这种固定间距的喷头布局可能会导致作业效果低下、药剂浪费、或者产生使用方面上的不便。另一方面,无人机的飞行高度也会影响喷头之间的间距。如果无人机飞行高度较高,则需要较大的喷头间距,以保证药液能够在飞行过程中均匀喷洒在目标区域。而如果飞行高度较低,则需要较小的喷头间距,以保证喷洒的药剂在覆盖面积内能够均匀分布。
3、如何使得喷头之间的间距可以根据实际作业情况进行精细化、量化的调节,为农业作业提供更加灵活、高效、可控的方案,是近年来研究的热门方向。
技术实现思路
1、本技术提供一种农用无人机离心喷头间距调节控制方法。通过收集和分析喷洒剂种类、雾化盘转速、无人机飞行高度、无人机旋翼的风场速度等信息并进行实时运算,从而计算得到最佳的无人机离心喷头间距,以保障喷洒剂喷洒的均匀且无死角。本技术不仅可以提高农用无人机的作业效率,减少药剂浪费和人工成本,以期通过环保、高效的喷洒方式为农业生产提供新的技术支持。
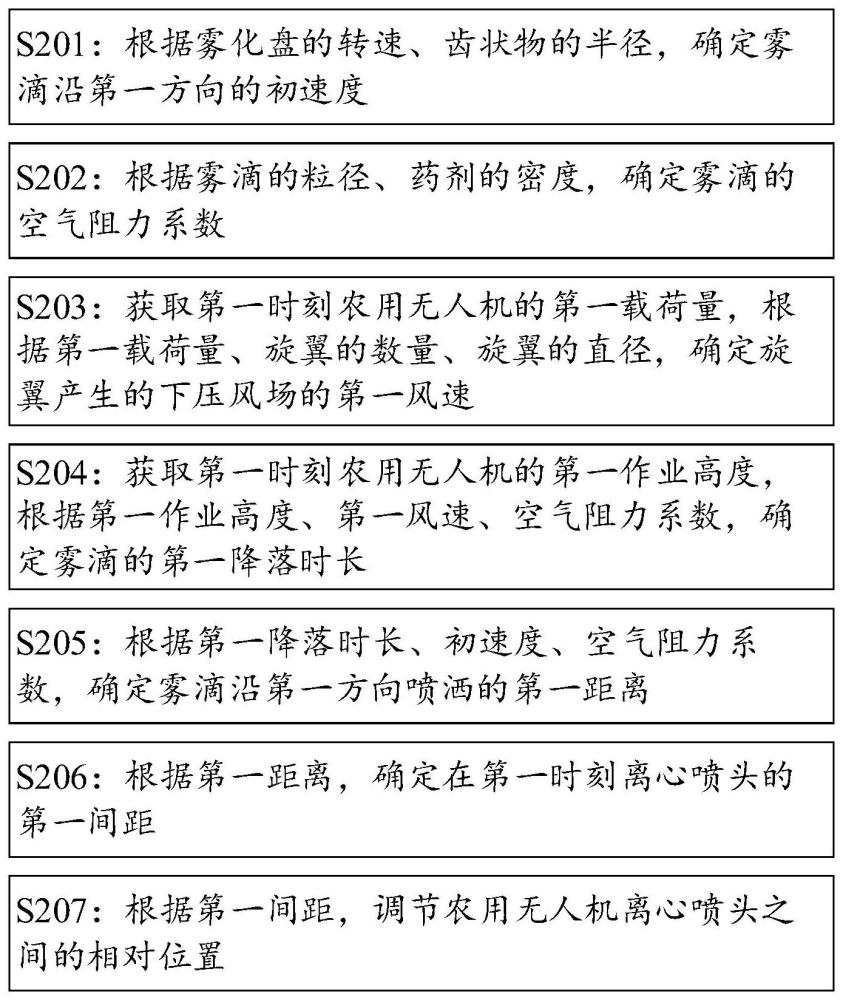
2、第一方面,提供一种农用无人机离心喷头间距调节控制方法,离心喷头包括雾化盘,雾化盘边缘设置有齿状物,雾化盘通过旋转使齿状物撞击药剂,药剂被雾化成雾滴从离心喷头喷洒出。该调节方法具体包括以下步骤,获取农用无人机的作业数据,作业数据包括雾滴的粒径、雾化盘的转速、齿状物的半径、药剂的密度、农用无人机旋翼的数量以及旋翼的直径;根据雾化盘的转速、齿状物的半径,确定雾滴沿第一方向的初速度,其中,第一方向与雾化盘相切,第一方向垂直于重力方向;根据雾滴的粒径、药剂的密度,确定雾滴的空气阻力系数;获取第一时刻农用无人机的第一载荷量,根据第一载荷量、无人机旋翼的数量、旋翼的直径,确定旋翼产生的下压风场的第一风速;获取第一时刻农用无人机的第一作业高度,根据第一作业高度、第一风速、空气阻力系数,确定雾滴的第一降落时长;根据第一降落时长、初速度、空气阻力系数,确定雾滴沿第一方向喷洒的第一距离;根据第一距离,确定在第一时刻离心喷头的第一间距;根据第一间距,调节农用无人机离心喷头之间的相对位置。
3、基于本技术方案,通过获取无人机的设定参数和/或通过无人机上设置的传感器传输的数据,可通过感知无人机飞行的高度从而判断喷洒的雾滴在无人机旋翼风场等的作用力下的降落时间,根据降落时间计算出雾滴在初速度方向的扩散距离,并根据扩散距离调节无人机离心喷头之间的间距。本技术不仅可以提高农用无人机的作业效率,减少药剂浪费和人工成本,以期通过环保、高效的喷洒方式为农业生产提供新的技术支持。
4、结合第一方面,在第一方面的某些实现方式中,确定雾滴的第一降落时长包括:
5、
6、其中,h为第一作业高度,vs为第一风速,μ为空气阻力系数,通过获取农用无人机在第一时刻的第一作业高度h,确定雾滴的第一降落时长t。
7、基于本技术方案,通过计算和/或探测无人机飞行的高度可以计算喷洒的雾滴在无人机旋翼风场等的作用力下的降落时间,可知降落时间与无人机飞行高度、旋翼产生的下压风场的风速以及雾滴自身受到的空气阻力系数相关。根据降落时间计算出雾滴在初速度方向的扩散距离,并根据扩散距离调节无人机离心喷头之间的间距。本技术不仅可以提高农用无人机的作业效率,减少药剂浪费和人工成本,以期通过环保、高效的喷洒方式为农业生产提供新的技术支持。
8、结合第一方面,在第一方面的某些实现方式中,确定雾滴的第一距离包括:
9、
10、其中,rf为雾滴沿第一方向喷洒的第一距离,vx为雾滴的初速度,μ为空气阻力系数,t为雾滴的第一滴落时长,根据雾滴的第一滴落时长t的值确定雾滴沿第一方向喷洒的第一距离rf的值。
11、基于本技术方案,通过计算得到的雾滴的滴落时长,可计算雾滴沿初速度方向的运动距离,雾滴沿初速度方向的喷洒距离与雾滴的初速度、以及雾滴自身受到的空气阻力系数相关。根据计算得到的扩散距离调节无人机离心喷头之间的间距。本技术不仅可以提高农用无人机的作业效率,减少药剂浪费和人工成本,以期通过环保、高效的喷洒方式为农业生产提供新的技术支持。
12、结合第一方面,在第一方面的某些实现方式中,确定离心喷头的第一间距包括:
13、n≤2rf
14、其中,n为无人机喷头的第一间距,rf为雾滴在第一方向喷洒的第一距离。
15、基于本技术方案,通过计算得到的雾滴在第一方向的喷洒距离设定两喷头之间的间距。本技术可以在无人机作业期间根据不同的高度调节喷头之间的间距,也可以根据农作物的高度设定无人机作业的作业高度,从而自动调节盼头之间的间距;本技术不仅可以提高农用无人机的作业效率,减少药剂浪费和人工成本,以期通过环保、高效的喷洒方式为农业生产提供新的技术支持。
16、结合第一方面,在第一方面的某些实现方式中,确定雾滴的粒径包括:
17、d=an+bf+c
18、其中,d为雾滴的粒径,n为雾化盘的转速,f为雾化盘的流量,a、b、c为待定系数;确定待定系数包括通过实测雾滴的粒径d的数值进行拟合。
19、基于本技术方案,通过实验测试得到的雾滴粒径值与雾化盘转速以及雾化盘流量两个因变量拟合从而确定拟合公式的待定系数的值,得到雾滴粒径的计算公式,在无人机作业过程中,可根据雾化盘的转速以及雾化盘的流量确定雾滴的粒径,从而确定雾滴滴落时间以及相应的喷洒距离。本技术不仅可以提高农用无人机的作业效率,减少药剂浪费和人工成本,以期通过环保、高效的喷洒方式为农业生产提供新的技术支持。
20、结合第一方面,在第一方面的某些实现方式中,确定雾滴的空气阻力系数包括:
21、
22、其中,μ为空气阻力系数,d为雾滴的粒径,ρ为药剂的密度。
23、基于本技术方案,通过雾滴的粒径以及喷洒药剂的密度计算出离心喷头喷洒出的雾滴自身所受到的空气阻力系数,在无人机作业过程中,可根据不同类型的药剂确定雾滴自身的空气阻力系数,从而进一步精细化调节喷头之间的间距。本技术不仅可以提高农用无人机的作业效率,减少药剂浪费和人工成本,以期通过环保、高效的喷洒方式为农业生产提供新的技术支持。
24、结合第一方面,在第一方面的某些实现方式中,确定旋翼产生的下压风场的第一风速包括:
25、
26、其中,vs为第一风速,m为无人机旋翼的数量,d为旋翼的直径,l为无人机的第一载荷量,g为重力加速度。
27、基于本技术方案,通过无人机的旋翼数量、直径、无人机的载荷量计算无人机作业过程中旋翼产生的下压风场的风速,从而确定喷洒的雾滴在风场作用力下的降落速度,进一步精细化调节喷头之间的间距。本技术不仅可以提高农用无人机的作业效率,减少药剂浪费和人工成本,以期通过环保、高效的喷洒方式为农业生产提供新的技术支持。
28、结合第一方面,在第一方面的某些实现方式中,当农用无人机处于第二时刻时还包括获取第二时刻农用无人机的第二载荷量、以及农用无人机的第二作业高度;根据第二作业高度,确定雾滴的第二降落时长;根据第二降落时长,确定雾滴沿第一方向喷洒的第二距离、以及离心喷头的第二间距,根据第二间距,调节农用无人机离心喷头之间的相对位置。其中,第二时刻为第一时刻之后的时刻,第二时刻包括农用无人机的载荷量和/或农用无人机的作业高度发生变化的时刻。
29、第二方面,提供了一种计算机可读存储介质,该计算机可读存储介质包括计算机程序,当其在计算机设备上运行时,使得计算机设备中的处理单元执行第一方面或者第一方面的各种实现方式的方法。
30、第三方面,提供了一种芯片,该芯片包括处理器与数据接口,处理器通过数据接口读取存储器上存储的指令,以执行第一方面或者第一方面的各种实现方式的方法。
31、第四方面,提供了一种离心喷头间距调节的控制系统,该控制系统安装于农用无人机中,所述农用无人机还包括旋翼、储液箱、至少一组离心喷头。其中,旋翼通过旋转控制农用无人机飞行作业,储液箱用于存储待喷洒的药剂,离心喷头用于喷洒药剂,控制系统用于执行第一方面或者第一方面的各种实现方式的方法。
32、第五方面,提供了一种农用无人机,该农用无人机包括旋翼、储液箱、至少一组离心喷头以及控制器。其中,旋翼通过旋转控制农用无人机飞行作业,储液箱用于存储待喷洒的药剂,离心喷头用于喷洒药剂,控制器用于执行第一方面或者第一方面的各种实现方式的方法,控制器还用于根据第一方面或者第一方面的各种实现方式确定的第一间距调节至少一组离心喷头之间的相对位置。
- 还没有人留言评论。精彩留言会获得点赞!