桔球分瓣同步旋转机构及其分瓣机的制作方法
1.本发明具体涉及一种桔球分瓣同步旋转机构及其分瓣机。
背景技术:
2.桔子罐头生产过程中需要大量人工,尤其是分瓣工序需要的人工最多,传统是通过手工方式分瓣,具体是手持分瓣弓对准分瓣线进行定向切割,这种操作方式不仅工作时间长,劳动强度大,而且效率低。目前已有的自动分瓣设备采用类似人工的方法,包括桔球放置工位和切割工位两部分,将桔球预先放在放置工位上并传动进入切割工位,在运动过程中利用工业相机对桔球拍照,通过工控机内机器视觉系统在图像上找到分瓣线后,采用旋转机构旋转桔球至切割位置,由切割刀具对桔球进行定向切割。在桔球旋转切割过程中,上部的桔球旋转机构压住桔球,在摩擦力作用下,带动桔球和下部托桔盘一起旋转,起始时完整桔球还可以随桔球旋转机构运动,能实现桔球起始部分的精准切割,但是当桔球分瓣到大部分桔瓣已分散开的程度时,在继续旋转的过程中,桔瓣就会发生倾斜,使得上下无法完全对齐,会造成切割位点的偏移,切割刀具会切到桔肉上,无法实现完整桔球的分瓣精准切割,造成部分原料的浪费。
技术实现要素:
3.本发明的目的是:提供一种实现桔球上托件和桔球下托件同步旋转,避免在分瓣切割过程中桔球发生位置偏移,达到对完整桔球分瓣精准切割和大幅降低原料浪费的桔球分瓣同步旋转机构及其分瓣机。
4.为了达到上述目的,本发明的第一个技术方案是:一种桔球分瓣同步旋转机构,包括呈上下布置的上分瓣机构和下分瓣机构,以及设在上分瓣机构和下分瓣机构一侧的切割机构,所述上分瓣机构包括上电机、上电机驱动模块、升降组件和桔球上托件,所述上电机与升降组件固定连接,所述上电机与上电机驱动模块导线连接,且上电机的电机轴与桔球上托件传动连接,所述下分瓣机构包括桔球下托件,其创新点在于:所述下分瓣机构还包括下电机、下电机驱动模块和无线电源接收模块,所述无线电源接收模块为下电机供电,所述下电机与下电机驱动模块导线连接,且下电机的电机轴与桔球下托件传动连接;还包括分瓣同步机构,所述分瓣同步机构包括无线电源发射模块、同步运动发射模块、同步运动接收模块和同步信号控制模块,所述无线电源发射模块与无线电源接收模块无线连接,所述同步信号控制模块与同步运动发射模块导线连接,同步运动发射模块与同步运动接收模块无线连接,所述同步运动接收模块与下电机驱动模块导线连接;所述上电机驱动模块与同步信号控制模块导线连接,所述同步信号控制模块接收分瓣角度信号后,分别发送旋转脉冲信号给上电机驱动模块和同步运动发射模块,所述同步运动发射模块发送旋转脉冲信号给同步运动接收模块,同步运动接收模块将旋转脉冲信号发送给下电机驱动模块,下电机驱动模块驱动下电机运动,使桔球上托件和桔球下托件
实现同步旋转。
5.在上述第一个技术方案中,所述切割机构包括驱动源和切割刀,所述驱动源与切割刀传动连接,所述驱动源为气缸或者是电动伸缩装置,驱动源通过连接件与切割刀传动连接。
6.在上述第一个技术方案中,所述下电机和上电机为步进电机或伺服电机;所述同步信号控制模块可选用由意法半导体集团生产的型号为stm32 f103c8t6或由atmel公司生产的型号为avr328p的同步信号控制模块;所述无线电源发射模块和无线电源接收模块可以选用由深圳芯科泰半导体有限公司生产,且型号为xkt510-24的无线发射、接收电源模块,或者是选用由深圳市优信电子科技有限公司生产,且型号为xkt001-01的无线发射、接收电源模块;所述同步运动发射模块和同步运动接收模块可选用光电开关式模块或磁性开关式模块。
7.为了达到上述目的,本发明的第二个技术方案是:一种带有同步旋转机构的桔球分瓣机,包括上分瓣机构、下分瓣机构、切割机构、桔球输送机构、工业相机和主控制器,所述下分瓣机构与桔球输送机构装连,所述上分瓣机构与下分瓣机构呈上下布置,所述切割机构设在上分瓣机构和下分瓣机构的一侧,所述工业相机与主控制器导线连接且用于采集桔球图片,所述上分瓣机构包括上电机、上电机驱动模块、升降组件和桔球上托件,所述上电机与升降组件固定连接,所述上电机与上电机驱动模块导线连接,且上电机的电机轴与桔球上托件传动连接,所述下分瓣机构包括桔球下托件,其创新点在于:所述下分瓣机构还包括下电机、下电机驱动模块和无线电源接收模块,所述无线电源接收模块为下电机供电,所述下电机与下电机驱动模块导线连接,且下电机的电机轴与桔球下托件传动连接;还包括分瓣同步机构,所述分瓣同步机构包括无线电源发射模块、同步运动发射模块、同步运动接收模块和同步信号控制模块,所述无线电源发射模块与无线电源接收模块无线连接,所述同步信号控制模块与同步运动发射模块导线连接,且同步运动发射模块与同步运动接收模块无线连接,所述同步运动接收模块与下电机驱动模块导线连接;所述同步信号控制模块与主控制器导线连接,所述上电机驱动模块与同步信号控制模块导线连接,所述同步信号控制模块接收到主控制器发出的分瓣角度信号后,分别发送旋转脉冲信号给上电机驱动模块和同步运动发射模块,所述同步运动发射模块通过同步运动接收模块将旋转脉冲信号发送给下电机驱动模块,使桔球上托件和桔球下托件实现同步旋转。
8.在上述第二个技术方案中,所述桔球输送机构包括流水线驱动电机、主动链轮、传动链轮和链条,所述流水线驱动电机的电机轴上装有主动链轮,所述主动链轮通过链条与传动链轮传动连接,所述下分瓣机构的下电机固定在链条上。
9.在上述第二个技术方案中,还包括发射支架,所述发射支架设在下分瓣机构的侧边,所述无线电源发射模块、同步运动发射模块和同步信号控制模块安装在发射支架上,所述无线电源接收模块、同步运动接收模块和下电机驱动模块设在下电机一侧,并与无线电源发射模块、同步运动发射模块和同步信号控制模块相对布置。
10.在上述第二个技术方案中,所述升降组件是气缸或者是电动伸缩装置,所述上电机的端面上设有连接板,且连接板与气缸或电动伸缩装置的顶杆固定连接。
11.在上述第二个技术方案中,所述桔球上托件和桔球下托件均包括套管,以及设在套管外周均匀布置的压瓣片,所述压瓣片的贴近桔球一侧的侧面为弧形面。
12.在上述第二个技术方案中,所述切割机构包括驱动源和切割刀,所述驱动源与切割刀传动连接,所述驱动源为气缸或者是电动伸缩装置,驱动源通过连接件与切割刀传动连接。
13.在上述第二个技术方案中,所述下电机和上电机为步进电机或伺服电机;所述同步信号控制模块可选用由意法半导体集团生产的型号为stm32 f103c8t6或由atmel公司生产的型号为avr328p的同步信号控制模块;所述无线电源发射模块和无线电源接收模块可以选用由深圳芯科泰半导体有限公司生产,且型号为xkt510-24的无线发射、接收电源模块,或者是选用由深圳市优信电子科技有限公司生产,且型号为xkt001-01的无线发射、接收电源模块;所述同步运动发射模块和同步运动接收模块可选用光电开关式模块或磁性开关式模块。
14.本发明所具有的积极效果是:采用本发明的桔球分瓣同步旋转机构及其分瓣机后,由于本发明所述下分瓣机构包括下电机、下电机驱动模块、桔球下托件和无线电源接收模块,所述无线电源接收模块为下电机无线供电,所述下电机与下电机驱动模块导线连接,且下电机的电机轴与桔球下托件传动连接;还包括分瓣同步机构,所述分瓣同步机构包括无线电源发射模块、同步运动发射模块、同步运动接收模块和同步信号控制模块,所述无线电源发射模块与无线电源接收模块无线连接,所述同步信号控制模块与同步运动发射模块导线连接,且同步运动发射模块与同步运动接收模块无线连接,所述同步运动接收模块与下电机驱动模块导线连接;所述同步信号控制模块与主控制器导线连接,所述上电机驱动模块与同步信号控制模块导线连接,所述同步信号控制模块接收到主控制器发出的分瓣角度信号后,分别发送旋转脉冲信号给上电机驱动模块和同步运动发射模块,所述同步运动发射模块发送旋转脉冲信号给同步运动接收模块,同步运动接收模块将旋转脉冲信号发送给下电机驱动模块,下电机驱动模块驱动下电机运动,使桔球上托件和桔球下托件实现同步旋转;使用时,将桔球放置在桔球放置工位的桔球下托件上,所述下分瓣机构通过桔球输送机构运动至分瓣工位,在运动过程中利用工业相机对桔球拍照,所述主控制器将工业相机采集到图片通过机器视觉系统进行图像分析、处理、判断分瓣线的位置,当带桔球的下分瓣机构移动到上分瓣机构的下方的分瓣工位时,所述上分瓣机构的桔球上托件压住桔球上部,使桔球能被上下固定,所述主控制器发出分瓣角度信号,所述同步信号控制模块接收到的分瓣角度信号转换成旋转脉冲信号导线传送给上电机驱动模块和同步运动发射模块,所述同步运动发射模块通过光电信号无线传送给同步运动接收模块,同步运动接收模块将旋转脉冲信号发送给下电机驱动模块,所述上电机驱动模块驱动上电机,下电机驱动模块驱动下电机同步运动,使桔球上托件和桔球下托件实现同步旋转,带动桔球旋转运动,且无相对摩擦,桔球也不会有相对位移现象发生,当桔球旋转至切割线正对切割机构时,所述切割机构对准桔球的分瓣线精准切割,这样,就不会出现已有技术中桔球分瓣到最后几片时,因摩擦力作用导致已分瓣桔片发生偏移,造成分瓣线对位不准切破桔瓣的问题,不会造成部分橘球的浪费,由于桔球上托件和桔球下托件能同步旋转,避免了在分瓣切割过程中桔球发生位置偏移,从而实现了完整桔球分瓣精准切割和大幅降低原料浪费的目的。同时,本
发明所述下电机可通过无线供电方式进行供电和获取运动信号,解决在流水线上安装电机的电源和信号提供的问题。
附图说明
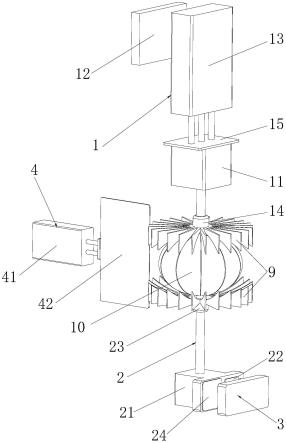
15.图1是本发明的一种桔球分瓣同步旋转机构的具体实施方式的结构示意图;图2是本发明的下分瓣机构的结构示意图;图3是本发明的分瓣同步机构的结构示意图;图4是本发明的一种带有同步旋转机构的桔球分瓣机的具体实施方式的结构示意图;其中,1-上分瓣机构,11-上电机,12-上电机驱动模块,13-升降组件,14-桔球上托件,2-下分瓣机构,21-下电机,22-下电机驱动模块,23-桔球下托件,24-无线电源接收模块,3-分瓣同步机构,31-无线电源发射模块,32-同步运动发射模块,33-同步运动接收模块,34-同步信号控制模块,4-切割机构,41-驱动源,42-切割刀,5-桔球输送机构,51-水线驱动电机,52-主动链轮,53-传动链轮,54-链条,6-工业相机,7-主控制器,8-发射支架,9-压瓣片。
具体实施方式
16.以下结合附图以及给出的实施例,对本发明作进一步的说明,但并不局限于此。
17.实施例1如图1、2、3所示,一种桔球分瓣同步旋转机构,包括呈上下布置的上分瓣机构1和下分瓣机构2,以及设在上分瓣机构1和下分瓣机构2一侧的切割机构4,所述上分瓣机构1包括上电机11、上电机驱动模块12、升降组件13和桔球上托件14,所述上电机11与升降组件13固定连接,所述上电机11与上电机驱动模块12导线连接,且上电机11的电机轴与桔球上托件14传动连接,所述下分瓣机构2包括桔球下托件23,所述下分瓣机构2还包括下电机21、下电机驱动模块22和无线电源接收模块24,所述无线电源接收模块24为下电机21供电,所述下电机21与下电机驱动模块22导线连接,且下电机21的电机轴与桔球下托件23传动连接;还包括分瓣同步机构3,所述分瓣同步机构3包括无线电源发射模块31、同步运动发射模块32、同步运动接收模块33和同步信号控制模块34,所述无线电源发射模块31与无线电源接收模块24无线连接,所述同步信号控制模块34与同步运动发射模块32导线连接,同步运动发射模块32与同步运动接收模块33无线连接,所述同步运动接收模块33与下电机驱动模块22导线连接;所述上电机驱动模块12与同步信号控制模块34导线连接,所述同步信号控制模块34接收分瓣角度信号后,分别发送旋转脉冲信号给上电机驱动模块12和同步运动发射模块32,所述同步运动发射模块32发送旋转脉冲信号给同步运动接收模块33,同步运动接收模块33将旋转脉冲信号发送给下电机驱动模块22,下电机驱动模块22驱动下电机21运动,使桔球上托件14和桔球下托件23实现同步旋转。
18.进一步地,本发明所述切割机构4包括驱动源41和切割刀42,所述驱动源41与切割刀42传动连接,所述驱动源41为气缸或者是电动伸缩装置,驱动源41通过连接件与切割刀
42传动连接。其中,电动伸缩装置可以是直线电机,当驱动源41为气缸时,则气缸的顶杆通过连接扣与切割刀42传动连接,当驱动源41为电动伸缩装置(直线电机)时,则电动伸缩装置通过u形连接块与切割刀42传动连接。使用时,可通过气缸或直线电机带动切割刀42向桔球分瓣线方向运动,实施对桔球的分瓣。
19.实施例2如图1、2、3、4所示,一种带有同步旋转机构的桔球分瓣机,包括上分瓣机构1、下分瓣机构2、切割机构4、桔球输送机构5、工业相机6和主控制器7,所述下分瓣机构2与桔球输送机构5装连,所述上分瓣机构1与下分瓣机构2呈上下布置,所述切割机构4设在上分瓣机构1和下分瓣机构2的一侧,所述工业相机6与主控制器7导线连接且用于采集桔球图片,所述工业相机6设置在传动链轮53外侧并位于下分瓣机构2在移动路径的拐弯处,或者工业相机6设置在传动链轮53外侧并靠近上分瓣机构1,所述工业相机6可对准桔球下托件23上的桔球,用来采集桔球图片,所述上分瓣机构1包括上电机11、上电机驱动模块12、升降组件13和桔球上托件14,所述上电机11与升降组件13固定连接,所述上电机11与上电机驱动模块12导线连接,且上电机11的电机轴与桔球上托件14传动连接,所述下分瓣机构2包括桔球下托件23,所述下分瓣机构2还包括下电机21、下电机驱动模块22和无线电源接收模块24,所述无线电源接收模块24为下电机21供电,所述下电机21与下电机驱动模块22导线连接,且下电机21的电机轴与桔球下托件23传动连接;还包括分瓣同步机构3,所述分瓣同步机构3包括无线电源发射模块31、同步运动发射模块32、同步运动接收模块33和同步信号控制模块34,所述无线电源发射模块31与无线电源接收模块24无线连接,所述同步信号控制模块34与同步运动发射模块32导线连接,且同步运动发射模块32与同步运动接收模块33无线连接,所述同步运动接收模块33与下电机驱动模块22导线连接;所述同步信号控制模块34与主控制器7导线连接,所述上电机驱动模块12与同步信号控制模块34导线连接,所述同步信号控制模块34接收到主控制器7发出的分瓣角度信号后,分别发送旋转脉冲信号给上电机驱动模块12和同步运动发射模块32,所述同步运动发射模块32发送旋转脉冲信号给同步运动接收模块33,同步运动接收模块33将旋转脉冲信号发送给下电机驱动模块22,下电机驱动模块22驱动下电机21运动,使桔球上托件14和桔球下托件23实现同步旋转。
20.如图4所示,为了实现流水线操作,提高桔球分瓣效率,所述桔球输送机构5包括流水线驱动电机51、主动链轮52、传动链轮53和链条54,所述流水线驱动电机51的电机轴上装有主动链轮52,所述主动链轮52通过链条54与传动链轮53传动连接,所述下分瓣机构2的下电机21固定在链条54上。
21.如图4所示,为了提高本发明的带有同步旋转机构的桔球分瓣机的桔球分瓣效率,所述链条54移动的轨迹为环形,且环形安置的链条54的一侧(见图4的内侧)设置桔球放置工位,另一侧(见图4的外侧)且位于上分瓣机构1的下方为分瓣工位,所述链条54的放置工位和分瓣工位上均设有下分瓣机构2,这样,可以使链条54在移动过程中,既可以保证放置工位上的下分瓣机构2承载桔球移动到分瓣工位,又能使分瓣工位上的下分瓣机构2与上分瓣机构1同时运动对桔球进行分瓣,大大提高了分瓣效率。
22.如图3、4所示,为了方便安置发射模块,还包括发射支架8,所述发射支架8设在下分瓣机构2的侧边,所述无线电源发射模块31、同步运动发射模块32和同步信号控制模块34安装在发射支架8上,所述无线电源接收模块24、同步运动接收模块33和下电机驱动模块22设在下电机21一侧,并与无线电源发射模块31、同步运动发射模块32和同步信号控制模块34相对布置。
23.如图1、4所示,为了方便在桔球分瓣时稳定旋转,确保桔球能够被压住,所述升降组件13是气缸或者是电动伸缩装置,所述上电机11的端面上设有连接板15,且连接板15与气缸或电动伸缩装置的顶杆固定连接。其中,所述电动伸缩装置可以是直线电机。使用时,所述升降组件13向下运动带动上电机11下压在桔球的上部。
24.如图4所示,为了确保桔球受到的压力均衡,以及保证所述压瓣片9不仅能够更贴合压在桔瓣外侧面,而且又不会对桔瓣造成破坏,所述桔球上托件14和桔球下托件23均包括套管,以及设在套管外周均匀布置的压瓣片9,所述压瓣片9的贴近桔球一侧的侧面为弧形面。
25.进一步地,所述切割机构4包括驱动源41和切割刀42,所述驱动源41与切割刀42传动连接,所述驱动源41为气缸或者是电动伸缩装置,驱动源41通过连接件与切割刀42传动连接。当驱动源41为气缸时,则气缸的顶杆通过连接扣与切割刀42传动连接,当驱动源41为电动伸缩装置时,则电动伸缩装置通过u形连接块与切割刀42传动连接。其中,所述电动伸缩装置可以是直线电机,使用时,当桔球分瓣线旋转至切割刀42相对应位置时,切割刀42可对准分瓣线实施定向切割。
26.本发明实施例1和实施例2中分瓣同步机构所用到的模块均是市售产品,具体地:所述下电机21和上电机11为步进电机或伺服电机;所述主控制器7可选用研华科技(中国)有限公司生产的型号为ipc-610l工控机或上海森克电子科技有限公司生产的型号为sk-12gb工控机;所述同步信号控制模块4可选用由意法半导体(st)集团生产的型号为stm32 f103c8t6或由atmel公司生产的型号为avr328p的同步信号控制模块;所述无线电源发射模块31和无线电源接收模块24可以选用由深圳芯科泰半导体有限公司生产,且型号为xkt510-24的无线发射、接收电源模块,或者是选用由深圳市优信电子科技有限公司生产,且型号为xkt001-01的无线发射、接收电源模块;所述同步运动发射模块32和同步运动接收模块33可选用光电开关式模块或磁性开关式模块,光电开关式模块可选用由温州孚尼电气有限公司生产型号为e3fn-t20l的光电发射和接收开关,或者是由乐清市恒好电子科技有限公司生产型号为t61的光电发射和接收开关,或者是由昆山贝弗机电设备有限公司生产型号为bm12po的光电发射和接收开关;磁性开关式模块中用于同步运动接收模块33可选用佛山市邦拓斯科技有限公司生产型号为c8-20n1的磁性开关,或者是由浙江沪工自动化科技有限公司生产型号为cs1-f伐磁性开关,或者是由上海佳顿电气有限公司生产型号为dfsh的磁性开关,用于同步运动发射模块32的电磁铁可选用上海明硕自动化科技有限公司生产型号为p25*12*08的电磁铁或者是由乐清市卡卡电气有限公司生产型号为kk-p10/10d的电磁铁。
27.本发明的工作过程:将桔球10用手工或通过机械手放置在桔球下托件14上,所述流水线驱动电机51通过主动链轮52带动链条54移动,使得所述下分瓣机构2跟随链条54从放置工位向切割分瓣工位移动,在运动过程中利用工业相机6对桔球拍照,所述主控制器7
将工业相机6采集到图片通过机器视觉系统进行分析、处理,并在图像上判断分瓣线位置,当下分瓣机构2移动到上分瓣机构1的下方时(即分瓣切割工位),所述上分瓣机构1的桔球上托件14在升降组件13的作用下向下运动并压住桔球上部,使桔球能够被上下固定住;所述无线电源发射模块31通过无线电源接收模块24为下电机21和下电机驱动模块22供电,由所述主控制器7发出分瓣角度信号,所述同步信号控制模块34接收到的分瓣角度信号转换成旋转脉冲信号并有线送给上电机驱动模块12和无线送给同步运动发射模块32,所述上电机驱动模块12驱动上电机11旋转,同时,所述同步运动发射模块32发送旋转脉冲信号给同步运动接收模块33,同步运动接收模块33将旋转脉冲信号发送给下电机驱动模块22,所述下电机驱动模块22驱动下电机21同步运动,使桔球上托件14和桔球下托件23实现同步带动桔球旋转运动,且无相对摩擦,桔球分瓣线旋转到切割位置后,所述切割刀42对桔球进行定向切割,一片桔瓣切割完成后,所述上电机11和下电机21再次通过同步机构同步旋转到下一个桔瓣分瓣线,直至所有分瓣线都被切割,完成分瓣工作。
28.因此,本发明在桔球分瓣过程中也不会有相对位移现象发生,所述切割机构4对准桔球的分瓣线精准切割,这样,就不会出现已有技术中桔球分瓣到最后几片时,因摩擦力作用而导致分瓣桔片发生偏移,而造成分瓣对位不准的问题,造成部分桔球切破,实现了对完整桔球的分瓣精准切割,大幅降低原料浪费的目的。同时,本发明所述下电机21通过无线供电方式进行供电,可解决流水线上电机或类似用电器械供电问题,避免用电线供电造成线路缠绕的问题。
29.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1