一种萝卜腌制设备的制作方法
1.本发明涉及食品加工技术领域,具体涉及一种萝卜腌制设备。
背景技术:
2.白萝卜是我们日常生活中经常食用的食品,中医认为,白萝卜性凉,昧辛甘,无毒,入肺、胃经,能消积滞、化痰热、下气、宽中、解毒,治食积胀满、痰嗽失音、肺痨咯血、呕吐反酸等。白萝卜具有很强的行气功能,还能止咳化痰、除燥生津、清热懈毒。现代营养学研究表明,白萝卜含有丰富的碳水化合物和多种维生素,其中维生素c的含量比梨高8~10倍,能有效抑制黑色素合成,阻止脂肪氧化,防止脂肪沉积;同时,白萝卜中还含有大量的植物蛋白、维生素c和叶酸,食入人体后可洁净血液和皮肤,同时还能降低胆固醇,有利于血管弹性的维持。
3.随着人们生活水平的不断提高,对健康食品及功能性营养食品的需求日益迫切,市场上的各类特色小吃丰富了人们生活内容。白萝卜的食用方法也变得多种多样,其中一种方式就是将白萝卜进行腌制,目前的腌制方式通常都是人工手动切割并腌制,劳动强度大,腌制效率低。
技术实现要素:
4.本发明所要解决的技术问题是提供一种萝卜腌制设备,旨在解决现有技术中的问题。
5.本发明解决上述技术问题的技术方案如下:
6.一种萝卜腌制设备,包括切割装置、添加装置和用于储存并腌制萝卜的盛放装置;所述切割装置安装在所述盛放装置的旁边,用于切割萝卜并送至所述盛放装置;所述添加装置安装在所述盛放装置的旁边,用于将腌料送至所述盛放装置。
7.本发明的有益效果是:腌制时,首先,通过切割装置对萝卜进行切割,并将切割完成的萝卜送至盛放装置;然后,通过添加装置将腌料送至盛放装置,萝卜在盛放装置内进行腌制,实现萝卜的自动腌制,腌制效率高。本发明结构紧凑,可完成萝卜的自动切割、添加腌料及腌制等工艺,实现萝卜的自动腌制,腌制效率高,人工劳动强度低。
8.在上述技术方案的基础上,本发明还可以做如下改进。
9.进一步,所述切割装置包括切割槽和切刀一,所述切割槽倾斜固定安装在所述盛放装置的旁边,其下端倾斜向下延伸至所述盛放装置的上方,且其下端敞口;所述切刀一可沿垂直于所述切割槽的方向移动的架设在所述切割槽上,用于切割所述切割槽内的萝卜。
10.采用上述进一步方案的有益效果是切割时,首先,通过本领域技术人员所能想到的方式例如手动将待切割的萝卜置于切割槽内并推动萝卜,在此过程中通过本领域技术人员所能想到的方式例如手动移动切刀一,以对萝卜进行切片处理,切割方便。
11.需要说明的是,上述方案中切刀一是对萝卜进行切片处理。
12.进一步,所述切割槽上固定架设有切割气缸,所述切割气缸位于所述切刀一的上
方,其伸缩端沿垂直于所述切割槽的方向伸缩,并与所述切刀一固定连接,用于带动所述切刀一移动。
13.采用上述进一步方案的有益效果是切割时,通过切割气缸伸缩并带动切刀一移动,实现对萝卜的切割,切割方便,切割效率高。
14.进一步,所述切割装置还包括切刀二,所述切刀二架设在所述切割槽上,其位于所述切刀一远离所述切割槽敞口端的一侧,且其可沿垂直于所述切割槽的方向移动并定位;所述切刀二包括刀座和多个刀片,多个所述刀片沿所述切割槽宽度的方向均匀间隔并排固定安装在所述刀座上,用于将所述切割槽内的萝卜切片。
15.采用上述进一步方案的有益效果是切割时,首先,通过本领域技术人员所能想到的方式例如手动将待切割的萝卜置于切割槽内并推动萝卜,在此过程中先通过切刀二对萝卜进行切片处理,然后通过切割气缸伸缩并带动切刀一移动,以对萝卜进行切丁处理,切割方便。
16.需要说明的是,当切刀二位于切割槽内时,先通过切刀二对萝卜进行切片处理,然后通过切刀一对切片后的萝卜进行切丁处理;当切刀二退出切割槽时,直接通过切刀一对萝卜进行切片处理。
17.进一步,所述切割槽上固定架设有调节气缸,所述调节气缸位于所述切刀二的上方,其伸缩端沿垂直于所述切割槽的方向伸缩,并与所述切刀二固定连接,用于带动所述切刀二延伸至所述切割槽内以对萝卜切片,或退出所述切割槽。
18.采用上述进一步方案的有益效果是切割时,通过调节气缸伸缩并带动切刀二移动至切割槽内,以对萝卜进行切片处理,然后切刀一再对萝卜进行切丁处理,或切刀二移动至切割槽外,以便切刀一对萝卜进行切片处理。
19.进一步,所述盛放装置包括多个上端均敞口的腌制罐,多个所述腌制罐均匀间隔分布;所述切割装置和所述添加装置分别位于多个所述腌制罐的旁边。
20.采用上述进一步方案的有益效果是腌制时,通过切割装置对萝卜进行切割处理,并送至腌制罐内;同时,通过添加装置将腌料送至腌制罐内,以对萝卜进行腌制。
21.需要说明的是,在此过程中,由于切割装置和添加装置的位置不变,此时可通过手动依次将多个腌制罐送至加工位,当其中任意一个腌制罐装满萝卜并添加腌料后,人工将该腌制罐移出加工位,并将下一个腌制罐送至加工位,重复上述操作,实现多个腌制罐的加料。
22.进一步,所述盛放装置还包括与多个所述腌制罐一一对应的盖子,还包括机器人,所述机器人位于所述腌制罐的旁边,用于将多个所述盖子分别盖在多个装有萝卜的所述腌制罐的上端。
23.采用上述进一步方案的有益效果是腌制时,通过机器人将多个盖子依次盖在多个装满萝卜的腌制罐内,以便人工拧盖,操作简便,腌制效率大大提高。
24.进一步,还包括输送装置,多个所述腌制罐沿所述输送装置输送的方向均匀间隔放置在输送装置上;所述切割装置和所述添加装置分别位于所述输送装置的两侧。
25.采用上述进一步方案的有益效果是腌制时,多个腌制罐均匀间隔分布在输送装置上,通过输送装置依次将多个腌制罐送至加工位,实现腌制罐的自动输送,腌制效率高。
26.进一步,所述添加装置包括用于装腌料的加料斗,所述加料斗固定架设在所述腌
制罐的上方,其出料口处固定安装有加料阀。
27.采用上述进一步方案的有益效果是腌制时,通过本领域技术人员所能想到的方式间隙性的开启加料阀以依次对多个腌制罐添加腌料,加料方便。
28.进一步,所述加料斗上对应其出料口的位置设有与其内部连通的开口,所述开口处水平滑动并定位的安装有电子秤,所述电子秤位于所述加料阀的下方。
29.采用上述进一步方案的有益效果是腌制时,通过本领域技术人员所能想到的方式间隙性的开启加料阀使得加料斗内的腌料下落至电子秤上;电子秤称取腌料的重量,同时可移动称重完成的电子秤使得腌料下落至腌制罐内,完成多个腌制罐的精确加料,加料方便。
附图说明
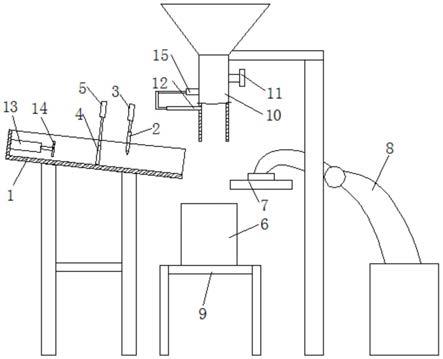
30.图1为本发明中萝卜切片时的结构示意图;
31.图2为本发明中萝卜切片添加腌料时的结构示意图;
32.图3为本发明中萝卜切丁时的结构示意图;
33.图4为本发明中萝卜切丁添加腌料时的结构示意图;
34.图5为本发明中切刀二的结构示意图。
35.附图中,各标号所代表的部件列表如下:
36.1、切割槽;2、切刀一;3、切割气缸;4、切刀二;5、调节气缸;6、腌制罐;7、盖子;8、机器人;9、输送装置;10、加料斗;11、加料阀;12、电子秤;13、推送气缸;14、推板;15、加料气缸。
具体实施方式
37.以下结合附图及具体实施例对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
38.实施例1
39.如图1至图5所示,本实施例提供一种萝卜腌制设备,包括切割装置、添加装置和用于储存并腌制萝卜的盛放装置;切割装置安装在盛放装置的旁边,用于切割萝卜并送至盛放装置;添加装置安装在盛放装置的旁边,用于将腌料送至盛放装置。
40.腌制时,首先,通过切割装置对萝卜进行切割,并将切割完成的萝卜送至盛放装置;然后,通过添加装置将腌料送至盛放装置,萝卜在盛放装置内进行腌制,实现萝卜的自动腌制,腌制效率高。
41.本实施例结构紧凑,可完成萝卜的自动切割、添加腌料及腌制等工艺,实现萝卜的自动腌制,腌制效率高,人工劳动强度低。
42.实施例2
43.在实施例1的基础上,本实施例中,盛放装置包括多个上端均敞口的腌制罐6,多个腌制罐6均匀间隔分布;切割装置和添加装置分别位于多个腌制罐6的旁边。
44.腌制时,通过切割装置对萝卜进行切割处理,并送至腌制罐6内;同时,通过添加装置将腌料送至腌制罐6内,以对萝卜进行腌制。
45.需要说明的是,在此过程中,由于切割装置和添加装置的位置不变,此时可通过手
动依次将多个腌制罐6送至加工位,当其中任意一个腌制罐6装满萝卜并添加腌料后,人工将该腌制罐6移出加工位,并将下一个腌制罐6送至加工位,重复上述操作,实现多个腌制罐6的加料。
46.实施例3
47.在实施例2的基础上,本实施例还包括输送装置9,多个腌制罐6沿输送装置9输送的方向均匀间隔放置在输送装置9上;切割装置和添加装置分别位于输送装置9的两侧。腌制时,多个腌制罐6均匀间隔分布在输送装置9上,通过输送装置9依次将多个腌制罐6送至加工位,实现腌制罐6的自动输送,腌制效率高。
48.优选地,本实施例中,上述输送装置9优选皮带输送机。腌制时,可通过人工或机械的方式将空的腌制罐6依次放置在皮带输送机的进料端,并依次送至加工位;通过切割装置将切割后的萝卜送至腌制罐6及添加装置将腌料送至腌制罐6内后,由皮带输送机送至下一工序。
49.优选地,本实施例中,切割装置和添加装置相对分布在皮带输送机的两侧。
50.上述方式外,也可以采用其他方式,例如手动依次将多个腌制罐6送至加工位,当其中任意一个腌制罐6装满萝卜并添加腌料后,人工将该腌制罐6移出加工位,并将下一个腌制罐6送至加工位,重复上述操作,实现多个腌制罐6的加料。这种方式人工劳动强度大,效率低下。
51.需要说明的是,当输送装置9将其中任意一个腌制罐6送至加工位后,输送装置9暂停,且当该腌制罐6内装满萝卜并添加腌料后输送装置9重新启动,将下一个腌制罐6送至加工位,以此类推,依次将多个空的腌制罐6送至加工位。
52.实施例4
53.在实施例2至实施例3任一项的基础上,本实施例还包括与多个腌制罐6一一对应的盖子7,还包括机器人8,机器人8位于腌制罐6的旁边,用于将多个盖子7分别盖在多个装有萝卜的腌制罐6的上端。
54.腌制时,通过机器人8将多个盖子7依次盖在多个装满萝卜的腌制罐6内,以便人工拧盖,操作简便,腌制效率大大提高。
55.优选地,本实施例中,上述多个盖子7优选整齐的摆放在输送装置9一侧的放置架上,机器人8位于放置架的旁边,方便机器人8取盖。
56.上述机器人8采用的是现有技术,其具体结构及原理在此不再进行赘述。
57.需要说明的是,上述机器人8的作用只是将盖子7盖在腌制罐6的敞口端,方便后续人工手动拧紧盖子7,人工劳动强度低,省时省力。
58.实施例5
59.在上述各实施例的基础上,本实施例中,切割装置包括切割槽1和切刀一2,切割槽1倾斜固定安装在盛放装置的旁边,其下端倾斜向下延伸至盛放装置的上方,且其下端敞口;切刀一2可沿垂直于切割槽1的方向移动的架设在切割槽1上,用于切割切割槽1内的萝卜。
60.切割时,首先,通过本领域技术人员所能想到的方式例如手动将待切割的萝卜置于切割槽1内并推动萝卜,在此过程中通过本领域技术人员所能想到的方式例如手动移动切刀一2,以对萝卜进行切片处理,切割方便。
61.需要说明的是,上述方案中切刀一2是对萝卜进行切片处理,通常是将萝卜切成圆形萝卜片。
62.优选地,本实施例中,上述切割槽1的安装方式可以为:输送装置9加工位的一侧固定安装有支架,切割槽1固定安装在支架的顶部,且其下端倾斜向下延伸至输送装置9加工位的上方。
63.优选地,切割时,可以人工手动推着萝卜在切割槽1内滑动以便切刀一2切割萝卜。
64.除上述方式外,还可以采用其他方式推动萝卜在切割槽1内移动,例如切割槽1的上端封闭,并固定安装有推送气缸13,推送气缸13沿切割槽1一端至另一端的方向伸缩,并固定连接有推板14。切割时,人工手动将萝卜置于切割槽1内对应推板14和切刀一2之间的位置,然后推送气缸13伸缩并带动推板14推动萝卜移动使得切刀一2切割萝卜。
65.实施例6
66.在实施例5的基础上,本实施例中,切割槽1上固定安装有安装架,切割气缸3固定安装在安装架上,切割气缸3位于切刀一2的上方,其伸缩端沿垂直于切割槽1的方向伸缩,并与切刀一2固定连接,用于带动切刀一2移动。切割时,通过切割气缸3伸缩并带动切刀一2移动,实现对萝卜的切割,切割方便,切割效率高。
67.优选地,本实施例中,上述安装架优选u形架,其敞口端的两侧分别与切割槽1的两侧固定连接,切割气缸3固定安装在安装架的封闭端上。
68.实施例7
69.在实施例5至实施例6任一项的基础上,本实施例中,切割装置还包括切刀二4,切刀二4架设在切割槽1上,其位于切刀一2远离切割槽1敞口端的一侧,且其可沿垂直于切割槽1的方向移动并定位;切刀二4包括刀座和多个刀片,多个刀片沿切割槽1宽度的方向均匀间隔并排固定安装在刀座上,用于将切割槽1内的萝卜切片。
70.切割时,首先,通过本领域技术人员所能想到的方式例如手动将待切割的萝卜置于切割槽1内并推动萝卜,在此过程中先通过切刀二4对萝卜进行切片处理,然后通过切割气缸3伸缩并带动切刀一2移动,以对萝卜进行切丁处理,切割方便。
71.需要说明的是,当切刀二4位于切割槽1内时,先通过切刀二4对萝卜进行切片处理,然后通过切刀一2对切片后的萝卜进行切丁处理;当切刀二4退出切割槽1时,直接通过切刀一2对萝卜进行切片处理,此时通常获得的是圆形萝卜片。
72.另外,当切刀二4位于切割槽1内时,此时切刀二4是沿萝卜的长度方向切,将萝卜切成长条形的片状萝卜片。
73.实施例8
74.在实施例7的基础上,本实施例中,切割槽1上固定安装有安装架,调节气缸5固定安装在安装架上,调节气缸5位于切刀二4的上方,其伸缩端沿垂直于切割槽1的方向伸缩,并与切刀二4的刀座固定连接,用于带动切刀二4延伸至切割槽1内以对萝卜切片,或退出切割槽1。
75.切割时,通过调节气缸5伸缩并带动切刀二4移动至切割槽1内,以对萝卜进行切片处理,然后切刀一2再对萝卜进行切丁处理,或切刀二4移动至切割槽1外,以便切刀一2对萝卜进行切片处理。
76.优选地,本实施例中,上述安装架优选u形架,其敞口端的两侧分别与切割槽1的两
侧固定连接,调节气缸5固定安装在安装架的封闭端上。
77.需要说明的是,上述切刀二4的定位依靠的是调节气缸5的关闭。
78.实施例9
79.在上述各实施例的基础上,本实施例中,添加装置包括用于装腌料的加料斗10,加料斗10固定架设在腌制罐6的上方,其出料口处固定安装有加料阀11。
80.腌制时,通过本领域技术人员所能想到的方式间隙性的开启加料阀11以依次对多个腌制罐6添加腌料,加料方便。
81.优选地,本实施例中,输送装置9的另一侧固定安装有支架,支架的顶部延伸至输送装置9加工位的上方,加料斗10固定安装在支架的顶部。
82.优选地,本实施例中,加料阀11可以采用手动阀,也可以采用电磁阀。
83.实施例10
84.在实施例9的基础上,本实施例中,加料斗10上对应其出料口的位置设有与其内部连通的开口,开口处水平滑动并定位的安装有电子秤12,电子秤12位于加料阀11的下方。
85.腌制时,通过本领域技术人员所能想到的方式间隙性的开启加料阀11使得加料斗10内的腌料下落至电子秤12上;电子秤12称取腌料的重量,同时可移动称重完成的电子秤12使得腌料下落至腌制罐6内,完成多个腌制罐6的精确加料,加料方便。
86.优选地,本实施例还包括控制器和加料气缸15,加料气缸15固定安装在加料斗10的出料口处,其伸缩端沿水平方向延伸,并通过连接杆与电子秤12固定连接;加料气缸15、电子秤12和加料阀11分别与控制器通讯连接。腌制时,当其中任意一个腌制罐6位于加工位时,控制器开启加料阀11使得加料斗10内的腌料下落至电子秤12上,电子秤12将对应的重量信号发送给控制器;控制器接收对应的信号;当电子秤12上的腌料重量达到设定阈值时,控制器关闭加料阀11,同时启动加料气缸15,加料气缸15伸缩并带动电子秤12水平移动,使得其上的腌料下落至对应的腌制罐6内,实现腌料的自动精确添加。
87.需要说明的是,开口的尺寸略大于电子秤12的尺寸,即电子秤12的上表面和下表面贴近开口的两侧;电子秤12在水平移动的过程中,其上称重完成的腌料在加料斗10侧壁的阻挡下从电子秤12上滑落,从而顺利下落至对应的腌制罐6内。
88.本发明的工作原理如下:
89.第一,输送装置9将其中任意一个腌制罐6送至加工位;
90.第二,当需要对萝卜切片时,调节气缸5伸缩并带动切刀二4移出切割槽1,然后推送气缸13伸缩并带动推板14推动萝卜移动,同时切割气缸3伸缩并带动切刀一2对萝卜进行切片,萝卜片依靠自身的重力下落至对应的腌制罐6内;
91.当需要对萝卜切丁时,推送气缸13伸缩并带动推板14推动萝卜移动使得切刀一2切割萝卜,推送气缸13伸缩并带动推板14推动萝卜移动的过程中,首先切刀二4对萝卜进行切片处理,然后通过切割气缸3伸缩并带动切刀一2对萝卜进行切丁,萝卜丁依靠自身的重力下落至对应的腌制罐6内;
92.第三,控制器开启加料阀11使得加料斗10内的腌料下落至电子秤12上,电子秤12将对应的重量信号发送给控制器;控制器接收对应的信号;当电子秤12上的腌料重量达到设定阈值时,控制器关闭加料阀11,同时启动加料气缸15,加料气缸15伸缩并带动电子秤12水平移动,使得其上的腌料下落至对应的腌制罐6内,完成该腌制罐6萝卜及腌料的添加;
93.第四,输送装置9重新启动,将该装满萝卜的腌制罐6移出加工位,同时将下一个空的腌制罐6送至加工位;重复上述操作,实现多个腌制罐6萝卜和腌料的添加;
94.第五,通过机器人8依次将盖子7盖在多个装满萝卜的腌制罐6的敞口端,同时人工手动将盖子7拧紧。
95.需要说明的是,切割装置和添加装置互不影响,且切割装置在将切割后的萝卜送至腌制罐6内时,会有极少部分萝卜掉落至地面上,此时人工手动清理即可;另外,添加装置添加腌料时,会有极少部分腌料掉落至地面上,此时人工手动清理即可,但是不会影响萝卜腌制的整个过程。
96.本发明结构紧凑,可完成萝卜的自动切割、添加腌料、输送、上盖及腌制等工艺,实现萝卜的自动腌制,腌制效率高,人工劳动强度低。
97.需要说明的是,本发明所涉及到的各个电子部件均采用现有技术,并且上述各个部件与控制器(型号tc-scr)电连接,控制器与各个部件之间的控制电路为现有技术。
98.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1