食材上料装置及食物加工机的制作方法
1.本公开涉及食品加工技术领域,具体地,涉及一种食材上料装置及食物加工机。
背景技术:
2.目前,汉堡包、三明治等作为快餐中的较为受欢迎的食物,都是通过人工进行制作及包装,其自动化程度低,耗时耗力,人力成本较高。随着生活节奏的加快,人们对汉堡这种类型的快餐需求越来越大,尤其在早晚上班高峰期,人工制作食物的效率极低,无法在短时间内满足用户需求。另外,食物制作过程中的卫生问题一直受到人们的高度关注。因此,为提高食物制作效率、降低人工成本,以及优化食物制作中的卫生条件,亟需提供一种自动化程度较高的食物加工机。
技术实现要素:
3.本公开的目的是提供一种食材上料装置及使用该食材上料装置的食物加工机,以解决制作效率低的技术问题。
4.为了实现上述目的,本公开提供一种食材上料装置,用于将食材叠放到上料位置,所述食材上料装置包括:运载机构,具有能够承载食材并横向传送至所述上料位置上方的承载件;以及食材固定机构,具有能够在所述上料位置上下移动的固料件,其中,所述承载件配置为在所述固料件向下运动至与食材相接触时横向远离所述上料位置,以使食材掉落在所述上料位置处。
5.可选地,所述承载件包括主体杆和多根平行间隔地连接在所述主体杆上的支撑条,所述支撑条的一端连接在所述主体杆上,另一端与相邻的另一个支撑条之间形成开口。
6.可选地,所述固料件包括固定板和多根竖直连接在所述固定板的下方的叉杆,其中,在水平面内垂直于所述承载件的传送方向上,所述叉杆和所述支撑条交替布置,使得所述叉杆能够伸入所述开口。
7.可选地,多根所述叉杆呈矩形阵列地连接在所述固定板上。
8.可选地,所述叉杆的端部弹性连接在所述固定板上。
9.可选地,所述运载机构还包括与所述承载件相连接的运载杆、以及驱动所述运载杆横向运动的第一驱动组件,其中,所述第一驱动组件包括同步带和驱动所述同步带的主动轮转动的第一动力件,所述运载杆通过第一连接块安装在所述同步带上。
10.可选地,所述运载机构还包括驱动所述运载杆相对于所述第一连接块上下运动的第二驱动组件。
11.可选地,所述运载机构还包括与所述同步带同向布置的升降梁和支撑梁,所述运载杆通过第二连接块可横向移动地安装在所述升降梁上,所述升降梁可上下移动地连接在所述支撑梁的上方,其中,所述第二驱动组件用于驱动所述升降梁上下运动。
12.可选地,所述第二驱动组件包括第二动力件、连接在所述第二动力件的输出端的摇臂、可转动地连接在所述升降梁和所述支撑梁之间的支撑杆、以及可转动地连接在所述
支撑杆和所述摇臂之间的连接杆,其中,所述升降梁和所述支撑梁之间间隔布置有多根所述支撑杆。
13.可选地,所述食材上料转置包括并排设置的多个所述运载机构,且多个所述运载机构的承载件的传送方向在水平面的正投影共线。
14.可选地,所述食材固定机构还包括用于驱动所述固料件上下运动的第三驱动组件、以及驱动所述固料件横向运动的第四驱动组件。
15.根据本公开的另一个方面,还提供一种食物加工机,包括上述的食材上料装置。
16.通过上述技术方案,承载件将食材输送至上料位置,并在上料位置处与固料件相互配合,使承载件上的食材自动掉落至上料位置,完成不同食材的上料作业,实现自动化、流水线式作业,提高了工作效率,降低了工作人员的劳动强度,助力商家数字化升级。
17.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
18.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
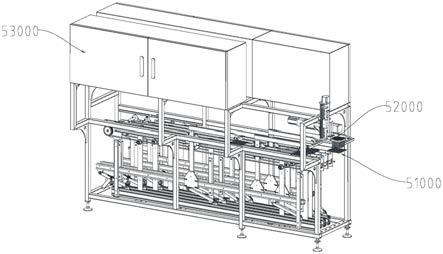
19.图1是本公开一示例性实施方式提供的食材上料装置的结构示意图;
20.图2是本公开一示例性实施方式提供的食材上料装置中承载件和固料件配合的结构示意图;
21.图3至图5是本公开一示例性实施方式提供的食材上料装置中运载机构的结构示意图;
22.图6是本公开一示例性实施方式提供的食材上料装置中食材固定机构的结构示意图;
23.图7和图8是本公开一示例性实施方式提供的食材上料装置中多个运载机构的安装示意图。
24.附图标记说明
25.51000-运载机构,51100-承载件,51110-主体杆,51120-支撑条,51200-运载杆,51300-第一驱动组件,51310-同步带,51320-主动轮,51330-第一动力件,51340-第一连接块,51400-第二驱动组件,51410-第二动力件,51421-摇臂,51422-支撑杆,51423-连接杆,51500-升降梁,51600-第二连接块,51700-支撑梁,51800-连接梁,52000-食材固定机构,52100-固料件,52110-固定板,52120-叉杆,52200-第三驱动组件,52300-第四驱动组件,53000-配电柜。
具体实施方式
26.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
27.在本公开中,在未作相反说明的情况下,使用的方位词如“上”、“下”通常是指在本公开提供的食材上料装置正常安装的情况下定义的,具体可参考图1所示的图面方向,“内”、“外”是指相应部件轮廓的内和外,此外,本公开中使用的术语“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。下面的描述涉及附图时,除非另有
表示,不同附图中的相同数字表示相同或相似的要素。
28.如图1和图2所示,本公开提供一种食材上料装置,用于将食材叠放到上料位置,该食材上料装置包括运载机构51000和食材固定机构52000,运载机构51000具有能够承载食材并横向传送至上料位置上方的承载件51100;食材固定机构52000具有能够在上料位置上下移动的固料件52100,其中,承载件511100配置为在固料件52100向下运动至与食材相接触时横向远离上料位置,以使食材掉落在上料位置处。这里,需要说明的是,食材可以为任意合适的食用性材料,具体下文中将以汉堡包或三明治的内容物为例,使食材掉落至位于上料位置的面饼上,例如汉堡的内容物可以为生菜、洋葱、肉饼等能够夹在汉堡面饼中的食用性材料。上料位置可以是汉堡包装工位,在上料位置,可以将面饼预先放置在平铺的包装纸上,由本公开提供的食材上料装置完成不同内容物的上料过程,最后,再在上方覆盖一层面饼后进行包装工序。
29.通过上述技术方案,承载件51100将食材输送至上料位置,并在上料位置处与固料件52100相互配合,使承载件51100上的食材自动掉落至上料位置,完成不同食材的上料作业,实现自动化、流水线式作业,提高了工作效率,降低了工作人员的劳动强度,助力商家数字化升级。
30.承载件51100可以为任意适当的结构。在本公开的一示例性实施方式中,如图2所示,承载件51100包括主体杆51110和多根平行间隔地连接在主体杆51110上的支撑条51120,支撑条51120的一端连接在主体杆51110上,另一端与相邻的另一个支撑条51120之间形成开口。可由操作人员或机械抓手将食材放置在支撑条51120上,相邻支撑条51120之间形成间隙,能够沥干食材的水分,避免影响食物后期的口感。在其他实施方式中,承载件51100还可以托盘形式的结构,可根据需要承载的食材进行适应性设计,本公开对此不做任何限制。
31.固料件52100可以为任意适当的结构。在本公开的一示例性实施方式中,如图2所示,固料件52100包括固定板52110和多根竖直连接在固定板52110的下方的叉杆52120,其中,在水平面内垂直于承载件51100的传送方向上,叉杆52120和支撑条51120交替布置,使得叉杆52120能够伸入开口。这样,叉杆52120能够向下伸入相邻支撑条51120之间的间隙,对于生菜、洋葱类食材,可起到稳定的固定作用,同时,叉杆52120可在开口的一侧伸入或退出,避免与承载件51100发生干涉。
32.具体地,在本实施方式中,如图2所示,在多根叉杆52120呈矩形阵列地连接在固定板52110上,增大了与食材的接触面积,对食材起到按压和固定作用。并且,在本实施方式中,叉杆52120的端部弹性连接在固定板52110上,这样,可避免叉杆52120与食材为刚性接触,在固料件52100向下运动时,避免叉杆52120直接插入食材内部,在承载件51100移开时,出现食材无法掉落的情况。固料件52100的设计形式可参考毛刷的设计,在承载件51100横向移动时,将食材从承载件51100上划下。
33.实现承载件51100横向传送的方式可以有多种。在本公开的一示例性实施方式中,如图3和图4所示,运载机构51000还包括与承载件51100相连接的运载杆51200、以及驱动运载杆51200横向运动的第一驱动组件51300,其中,第一驱动组件51300包括同步带51310和驱动同步带51310的主动轮51320转动的第一动力件51330,运载杆51200通过第一连接块51340安装在同步带51310上。第一动力件51330可以为伺服电机,驱动主动轮51320转动,进
而转化为同步带51310带动运载杆51200的直线运动,以将承载有食材的承载件51100顺利传送至上料位置。在其他实施方式中,第一驱动组件51300还可以为与运载杆51200相连接的直线模组、直线电机、齿轮齿条机构等。另外,为保证第一连接块51340与运载杆51200、以及将在下文中介绍的第二连接块51600和升降梁51500之间的相对运动,可以在第一连接块51340和第二连接块51600上分别开设有滑槽,运载杆51200和升降梁51500分别设计为可滑动地安装在对应的滑槽内。
34.为实现多种食材的传送,可以设置多个针对不同食材的运载机构51000,例如,肉饼类食材可以采用托盘形式的承载件51100,生菜、洋葱类食材可以采用支撑条51120形式的承载件51100,因此,如图7和图8所示,本公开提供的食材上料转置包括并排设置的多个运载机构51000,且多个运载机构51000的承载件51100的传送方向在水平面的正投影共线,通过对相应的运载机构51000运动控制,按一定顺序完成不同食材的上料作业。
35.进一步地,为避免多个运载机构51000的承载件511000发生干涉,在本公开中,运载机构51000还包括驱动运载杆51200相对于第一连接块51340上下运动的第二驱动组件51400。
36.驱动运载杆51200上下运动的方式可以有多种。在本公开的一示例性实施方式中,运载机构51000还包括与同步带51310同向布置的升降梁51500和支撑梁51700,运载杆51200通过第二连接块51600可横向移动地安装在升降梁51500上,升降梁51500可上下移动地连接在支撑梁51700的上方,其中,第二驱动组件51400用于驱动升降梁51500上下运动。这样,通过驱动升降梁51500的上下运动实现承载件51100的上下运动,运载杆51200相对于升降梁51500的横向移动、与升降梁51500带动运载杆51200的上下运动不会发生干涉,尤其是在设置多个运载机构51000的情况下,可避免位于同一方向上的多个承载件51100的运动受到干涉,可保证及时避让,使每个承载件51100都可以传送至上料位置。另外,在本公开中,如图4所示,为提高整个运载机构51000的稳定性,在安装同步带51310的主梁和支撑梁51700之间设置多根连接梁51800,起到固定和连接作用,避免在承载件51100横向运动和上下运动时产生晃动。
37.第二驱动组件51400可以为任意适当的结构形式。在本公开的一示例性实施方式中,如图5所示,第二驱动组件51400包括第二动力件51410、连接在第二动力件51410的输出端的摇臂51421、可转动地连接在升降梁51500和支撑梁51700之间的支撑杆51422、以及可转动地连接在支撑杆51422和摇臂51421之间的连接杆51423。第二动力件51410可以为伺服电机,驱动摇臂51421转动,进而带动连接杆51423和支撑杆51422转动,以转化为升降梁51500的上下运动,采用多连杆机构的方式,驱动升降梁51500上下运动。在本公开中,如图3所示,升降梁51500和支撑梁51700之间间隔布置有多根支撑杆51422,与第二动力件51410相连接的多连杆机构为主动驱动,布置在该方向上的多根支撑杆51422为从动件,不仅可以起到支撑作用,同时可以同步驱动升降梁51500上下运动。在其他实施方式中,第二驱动组件51400还可以为与运载杆51200直接连接的直线电机、直线模组等。
38.为实现固料件52100的上下运动和在横向上运动的自由度,在本公开中,如图6所示,食材固定机构52000还包括用于驱动固料件52100上下运动的第三驱动组件52200、以及驱动固料件52100横向运动的第四驱动组件52300。具体地,第三驱动组件52200和第四驱动组件52300分别可以为直线模组,第三驱动组件52200安装在第四驱动组件52300的滑台上,
固料件52100安装在第三驱动组件52200的滑台上,可根据需要控制固料件52100上下运动或横向运动。
39.根据本公开的第二个方面,还提供一种食物加工机,该食物加工机包括上文介绍的食材上料装置。该食物加工机具有上述食材上料装置的所有有益效果,此处不做过多赘述。这里的食物加工机可以为用于加工汉堡包、三明治、肉夹馍等的机器,通过本公开提供的食材上料装置将不同食材放置于汉堡包的面饼上,通过提高上料效率来提高食物的制作效率,助力商家的数字化升级。
40.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
41.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
42.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1