烟包机器人装框机的制作方法
本发明涉及烟草加工领域的烟草原料收储类别。
背景技术:
1、在烟草加工领域的打叶复烤企业中,原烟麻包的收储需要从运输货车转移到烟框里,现有的转移模式大多是采用人工的方式进行,此方式存在人工成本高、效率低、安全隐患高和收储质量不能保障等缺陷。近年来,国内市场上也逐渐出现了一些半自动化的原烟麻包收储线,但这些半自动化的原烟麻包收储线大多存在效率低、装框质量较差等缺陷。
技术实现思路
1、本申请发明的目的在于克服现有人工原烟麻包收储线和半自动化原烟麻包收储线技术存在的不足,提供一种烟包机器人装框机。
2、为了完成本申请的发明目的,本申请采用以下技术方案:
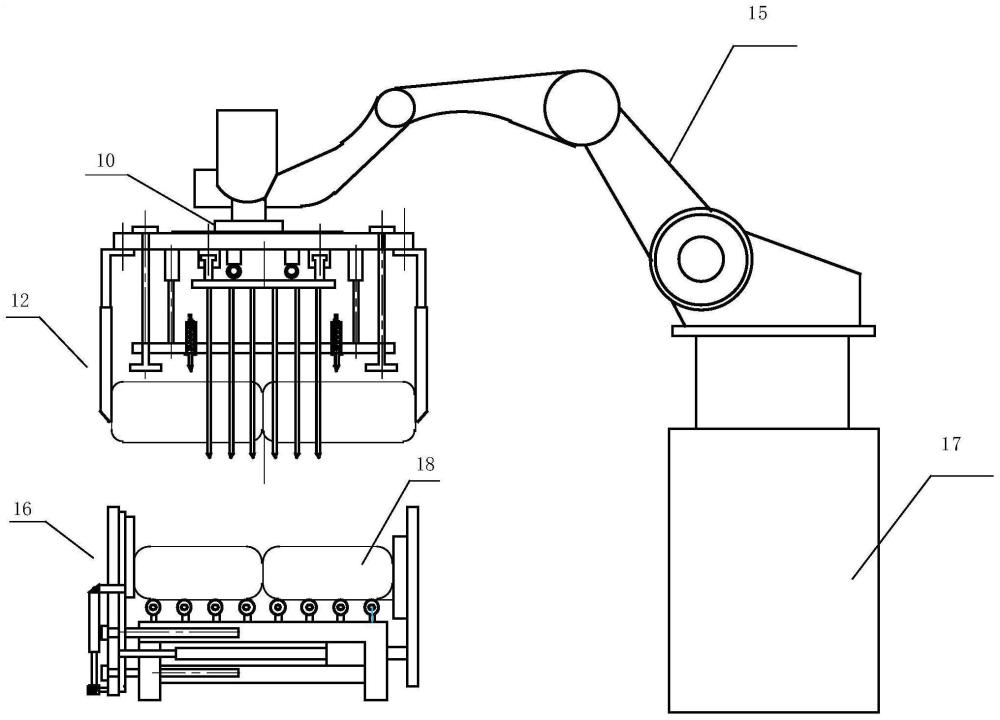
3、本发明的一种烟包机器人装框机,它包括:安装架、机器人、上夹具和下夹具,机器人的一端固定在安装架上,另一端通过连接件装在上夹具的上端,下夹具在上夹具的正下方,上夹具从下夹具上将烟包取走,并且通过机器人把烟包移动至所需位置,其中:上夹具包括:侧夹板、侧夹杆、上拉框、上框、插钉、第一气缸、第二气缸、插钉压框、导杆、托叉、滑道和滑块,在上框的左右两侧分别固定有一侧夹板,在每个侧夹板的长度方向上固定有多个侧夹杆;在上框下端的前后两侧分别固定有四根平行的滑道,四个滑块分别装在滑道上并沿着滑道滑动,两个上拉框分别装在上框下方前后两侧的两个滑块上,第一气缸一端装在上拉框上,另一端固定在上框上,在每个上拉框的外侧沿其长度方向分别装有多个托叉;在上框的四周分别装有至少四个导杆,每个导杆的一端固定在上框上,插钉压框在至少四个导杆上、下滑动,至少四个第二气缸的一端固定在上框下端,另一端装在插钉压框上,在插钉压框上装有至少四个插钉;下夹具包括:第四气缸、移动框架、滑轨、滑动挡板、第三气缸、支撑滚筒、固定挡板、固定框架和下支撑座,下支撑座安装在上夹具下方,在下支撑座的一侧固定有固定框架,在固定框架内侧装有固定挡板,在支撑座的另一侧装有移动框架,至少二个第三气缸的一端固定在下支撑座的前后两侧上,另一端装在移动框架的前后两端,第三气缸带动移动框架左右移动,在移动框架前后两侧分别装有一导轨,移动挡板在两根导轨之间滑动,两个第四气缸的一端分别固定在移动框架的下端,另一端分别固定在移动挡板上,带动移动挡板沿着两根导轨上下滑动,在下支撑座的上表面装有若干根支撑滚筒,烟包从移动框架一侧进入下支撑座的若干根支撑滚筒上,第三气缸带动移动框架向固定框架方向移动,同时第四气缸带动移动挡板向下或向上移动,将烟包夹紧;机器人带动上夹具向下移动,侧夹杆分别插入移动框架和固定框架的外侧,两个第一气缸分别带动上拉框和托叉向烟包移动,从底部托住烟包,第二气缸带动插钉压框向下移动,使得插钉扎入烟包中,上夹具夹住烟包,机器人将上夹具夹住的烟包移动至所需位置。
4、本发明的烟包机器人装框机,其中:所述插钉包括:插钉杆、压缩弹簧、压板、螺杆、外筒、上盖和螺母,插钉杆通过紧固件装在外筒下端,压缩弹簧装在外筒内,它的一端顶在插钉杆上,另一端顶在装在外筒内的压板上,上盖通过紧固件固定在外筒上端,螺杆穿过上盖顶在压板的上端,螺母装在外筒外的螺杆上,用于调节螺杆压住压板的力度,外筒穿过插钉压框,其下端固定在插钉压框上。
5、本发明的烟包机器人装框机,其中:所述托叉是向上夹具内侧弯曲的l型托叉。
6、本发明的烟包机器人装框机,其中:所述第一气缸装在两个滑道之间的上拉框上,它带动上拉框和托叉沿着滑道移动。
7、本发明的烟包机器人装框机,其中:所述下夹具还包括:至少两根横导杆,上述横导杆平行于第三气缸,它们的一端分别固定在移动框架的两侧,横导杆在下支撑座(28)内移动。
8、本发明的烟包机器人装框机,其中:所述横导杆为四根,它们分别装在第三气缸的上方和下方。
9、本发明的烟包机器人装框机,其中:送入支撑滚筒的烟包为1个、2个或4个。
10、本申请的烟包机器人装框机在已经排列组合成并拢的1组的4个烟包经过夹紧装置的输送机构输送到下夹具上,并由固定挡板挡住,然后移动挡板推动上述烟包向固定挡板移动并夹紧到一定的尺寸;机器人带动上夹具夹持住上述烟包并转移到上夹具里并压紧,可以实现1层共4个烟包的装框,共进行4次循环,就可以实现4层共16个烟包的行业装框标准。
技术特征:
1.一种烟包机器人装框机,它包括:安装架(17)、机器人(15)、上夹具(12)和下夹具(16),机器人(15)的一端固定在安装架(17)上,另一端通过连接件(10)装在上夹具(12)的上端,下夹具(16)在上夹具(12)的正下方,上夹具(12)从下夹具(16)上将烟包(18)取走,并且通过机器人(15)把烟包(18)移动至所需位置,其特征在于:上夹具(12)包括:侧夹板(1)、侧夹杆(2)、上拉框(3)、上框(4)、插钉(5)、第一气缸(6)、第二气缸(7)、插钉压框(8)、导杆(9)、托叉(11)、滑道(13)和滑块(14),在上框(4)的左右两侧分别固定有一侧夹板(1),在每个侧夹板(1)的长度方向上固定有多个侧夹杆(2);在上框(4)下端的前后两侧分别固定有四根平行的滑道(13),四个滑块(14)分别装在滑道(13)上并沿着滑道(13)滑动,两个上拉框(3)分别装在上框(4)下方前后两侧的两个滑块(14)上,第一气缸(6)一端装在上拉框(3)上,另一端固定在上框(4)上,在每个上拉框(3)的外侧沿其长度方向分别装有多个托叉(11);在上框(4)的四周分别装有至少四个导杆(9),每个导杆(9)的一端固定在上框(4)上,插钉压框(8)在至少四个导杆(9)上、下滑动,至少四个第二气缸(7)的一端固定在上框(4)下端,另一端装在插钉压框(8)上,在插钉压框(8)上装有至少四个插钉(5);下夹具(16)包括:第四气缸(19)、移动框架(20)、滑轨(21)、滑动挡板(22)、第三气缸(24)、支撑滚筒(25)、固定挡板(26)、固定框架(27)和下支撑座(28),下支撑座(28)安装在上夹具(12)下方,在下支撑座(28)的一侧固定有固定框架(27),在固定框架(27)内侧装有固定挡板(26),在支撑座(28)的另一侧装有移动框架(20),至少二个第三气缸(24)的一端固定在下支撑座(28)的前后两侧上,另一端装在移动框架(20)的前后两端,第三气缸(24)带动移动框架(20)左右移动,在移动框架(20)前后两侧分别装有一导轨(21),移动挡板(22)在两根导轨(21)之间滑动,两个第四气缸(19)的一端分别固定在移动框架(20)的下端,另一端分别固定在移动挡板(22)上,带动移动挡板(22)沿着两根导轨(21)上下滑动,在下支撑座(28)的上表面装有若干根支撑滚筒(25),烟包(18)从移动框架(20)一侧进入下支撑座(28)的若干根支撑滚筒(25)上,第三气缸(24)带动移动框架(20)向固定框架(27)方向移动,同时第四气缸(19)带动移动挡板(22)向下或向上移动,将烟包(18)夹紧;机器人(15)带动上夹具(12)向下移动,侧夹杆(2)分别插入移动框架(20)和固定框架(27)的外侧,两个第一气缸(6)分别带动上拉框(3)和托叉(11)向烟包(18)移动,从底部托住烟包(18),第二气缸(7)带动插钉压框(8)向下移动,使得插钉(5)扎入烟包(18)中,上夹具(12)夹住烟包(18),机器人(15)将上夹具(12)夹住的烟包(18)移动至所需位置。
2.根据权利要求1所述的烟包机器人装框机,其特征在于:所述插钉(5)包括:插钉杆(51)、压缩弹簧(52)、压板(53)、螺杆(54)、外筒(55)、上盖(56)和螺母(57),插钉杆(51)通过紧固件装在外筒(55)下端,压缩弹簧(52)装在外筒(55)内,它的一端顶在插钉杆(51)上,另一端顶在装在外筒(55)内的压板(53)上,上盖(56)通过紧固件固定在外筒(52)上端,螺杆(54)穿过上盖(56)顶在压板(53)的上端,螺母(57)装在外筒(55)外的螺杆(54)上,用于调节螺杆(54)压住压板(53)的力度,外筒(55)穿过插钉压框(8),其下端固定在插钉压框(8)上。
3.根据权利要求2所述的烟包机器人装框机,其特征在于:所述托叉(11)是向上夹具(12)内侧弯曲的l型托叉。
4.根据权利要求3所述的烟包机器人装框机,其特征在于:所述第一气缸(6)装在两个滑道(13)之间的上拉框(3)上,它带动上拉框(3)和托叉(11)沿着滑道移动。
5.根据权利要求4所述的烟包机器人装框机,其特征在于:所述下夹具(16)还包括:
6.根据权利要求5所述的烟包机器人装框机,其特征在于:所述横导杆(23)为四根,
7.根据权利要求6所述的烟包机器人装框机,其特征在于:送入支撑滚筒(25)的烟包(18)为1个、2个或4个。
技术总结
本发明烟包机器人装框机包括:安装架、机器人、上夹具和下夹具,机器人的一端固定在安装架上,另一端通过连接件装在上夹具的上端,上夹具包括:侧夹板、侧夹杆、上拉框、上框、插钉、第一气缸、第二气缸、插钉压框、导杆、托叉、滑道和滑块;下夹具包括:第四气缸、移动框架、滑轨、滑动挡板、第三气缸、支撑滚筒、固定挡板、固定框架和下支撑座,下支撑座安装在上夹具下方,烟包从移动框架一侧进入下支撑座的若干根支撑滚筒上,机器人带动上夹具向下移动,侧夹杆分别插入移动框架和固定框架外侧,第一气缸分别带动上拉框和托叉向烟包移动,从底部托住烟包,第二气缸带动插钉压框向下移动,机器人将上夹具夹住的烟包移动至所需位置。
技术研发人员:赵银,李乃森,李兴蕊,杨芳,邓树明,王华玲,许航线,王强,郭培
受保护的技术使用者:云南昆船烟草设备有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!