自适应支撑服装系统和方法与流程
自适应支撑服装系统和方法
1.优先权
2.本技术要求2019年5月31日提交的美国临时申请序列号62/855,712的权益,其内容通过引用以其整体并入本文。
技术领域
3.以下说明书描述了自适应支撑服装的各种示例以及在自适应支撑服装中使用的系带系统的各个方面。例如,公开了各个手动和自动的自适应机构,包括机动系带系统、机动和非机动系带引擎、与系带引擎相关的系带/带部件以及自动系带服装平台。
背景技术:
4.服装,如胸罩、上衣、下装、紧身衣、打底裤、内衣等可以被构造成在各种活动期间为穿着者提供支撑。这种服装可以包括对尺寸、体型、活动偏好等的最小调节,并且可以具有受限的调节或自适应。
技术实现要素:
5.本发明人已经认识到,除了别的以外,还需要改善支撑服装的合身性和功能,例如胸罩、紧身衣和各种其他服装、内衣或打底衣(在此也称为支撑服装)。一件示例服装是自适应胸罩,其可以定制以适合个体身体轮廓,并自动或手动调节以适应不同的动态条件(例如,活动水平的变化)。例如,当穿着者从休息过渡到剧烈运动时,自适应胸罩可以从最大舒适度调节到最大胸部支撑。自适应胸罩还可以利用联接到运动传感器的自动调节机构来动态调节,以抑制活动期间胸部的不希望的运动,例如跑步。自适应服装,例如下面讨论的自适应紧身衣,也可以提供动态支撑,有提高性能的潜能或减少受伤的潜能。在某些活动期间,可调节的压缩袖套可以帮助恢复或支撑身体。这里介绍的各种支撑服装的许多例子在下面的公开内容中讨论。
6.所讨论的自适应支撑服装可以包括支撑机构,例如系带、带、绑带引导件和自动/半自动/手动收紧引擎(也称为系带引擎或自适应引擎)。系带可以包括穿过自适应服装物品的不同部分的细绳的复杂模式,以使得服装的选定区域能够根据期望的结果收紧或放松。系带可以包括纱线、布缆或在制造(例如编织)过程期间集成的类似结构。例如,专用纱线或布缆可以编织到自适应服装的关键区域,并在服装外部布线,以与其他系带结构和/或自适应引擎对接,从而便于调节。本技术广义地使用术语“系带”来涵盖用于在自适应支撑服装内产生自适应支撑结构的多种材料和结构。系带可以起到自适应支撑结构的作用,其操作以改变自适应支撑服装的各个部分的相对位置。细绳或纱线可以是弹性的,也可以是非弹性的,这取决于特定的区域和期望的结果。弹性绳可以在更宽的区域提供收紧效果,而非弹性系带可以将拉力传递到更特定的区域。可以选择性地使用带材料(例如,具有一定宽度尺寸的织带或针织材料)来更好地分配拉力并潜在地增加舒适性。在某些例子中,系带可以在一个或多个地方通过固定连接或绑带引导型连接而联接到带。绑带引导件可以包括枢
轴、孔眼、管状结构和基于纺织品的隧道,以及其他结构,以引导绑带穿过自适应服装,从而产生期望的支撑结构。
7.这里使用的术语“支撑服装”意在包括任何数量的支撑服装,例如胸罩、运动胸罩、背心、具有内置支撑的吊带背心、游泳衣上衣、紧身衣、打底衣以及用于支撑身体组织(例如胸部组织)的其他样式或类型的支撑服装。支撑服装还可以包括内衣、紧身裤、打底裤、打底衣(例如紧身上衣或下装)、袖套和运动支撑物等。此外,这里使用的术语“胸部接触表面”意在包括任何类型的结构,当穿着支撑服装时,该结构与穿着者的胸部接触或位于其附近。在示例方面,对于典型的穿着者,支撑服装包括被构造为接触或邻近例如穿着者的右胸部定位的第一胸部接触表面和被构造为接触或邻近例如穿着者的左胸部定位的第二胸部接触表面。在示例方面,支撑服装包括单独的不同的罩杯(模制的或未模制的),每个罩杯包括胸部接触表面,并且每个罩杯被构造成覆盖或包封单独的胸部,或者支撑服装可以包括与穿着者的两个胸部接触的整体或连续的材料条带。任何和所有方面及其任何变化都被认为在本文的方面之内。虽然大多数例子涉及自适应胸罩,但这些原理可以应用于各种其他支撑服装,包括紧身衣、压缩袖套,甚至运动支撑物(通常称为护腿套)。
8.本发明人还认识到,除了别的以外,需要基于活动水平的变化来动态地修改由某些类型的支撑服装提供的支撑。修改支撑的需求源于长期的舒适性和活动期间所需的功能改进。因此,已经开发了一种系统,该系统包括活动传感器,例如惯性测量单元(imu:inertial measurement unit)、全球定位传感器(gps)或心率监测器等,其与控制电路通信,该控制电路向包括自适应引擎的自适应支撑服装发送命令,以便于基于检测到的活动水平的变化自动改变支撑。这些系统可以为穿着者提供全天舒适性,而不会影响面向性能的支撑。在完整的系统集成之前,穿着者要么需要为不同的活动更换支撑服装,要么需要进行多次手动调节。
9.这里讨论的活动传感器可以包括提供用户身体活动水平的指示的任何传感器,以及提供在使用期间施加在自适应支撑服装上的力(动态或静态)的指示的任何传感器。传感器可以嵌入到自适应支撑服装中,以提供与施加在支撑结构部分上的力相关的数据,所述支撑结构部分例如带、绑带、缆绳或织物区域。具体的传感器,如应变仪或拉伸电容传感器将在下面讨论。
10.以下自适应支撑服装的例子将进一步概述如何利用各种结构来提供动态自适应支撑服装。所公开的概念可以用于未具体讨论的附加服装,以执行类似的支撑功能。
附图说明
11.在不一定按比例绘制的附图中,相似的数字可以在不同的视图中描述相似的部件。具有不同字母后缀的相似数字可以表示相似部件的不同实例。附图通过示例而非限制的方式大体上示出了本文档中讨论的各种实施例。
12.图1a-1b是根据一些示例实施例的包括自适应支撑服装和相关电子器件的系统的图示。
13.图1c是示出根据一些示例实施例的自适应支撑系统中包括的部件的框图。
14.图1d-1e是示出根据一些示例实施例的用于动态调节自适应支撑服装的技术的流程图。
15.图1f是示出根据一些示例实施例的支撑水平校准和监测技术的流程图。
16.图2a是根据一些示例性实施例的自适应胸罩的可调节区的图示。
17.图2b是示出根据一些示例实施例的自适应胸罩的图示。
18.图2c是根据一些示例实施例的自适应胸罩的图示。
19.图3a-3b是根据一些示例性实施例的具有连续支撑结构的自适应胸罩的图示。
20.图3c是根据一些示例性实施例的针织绑带隧道的线图。
21.图4a-4d是根据一些示例性实施例的具有交叉后支撑系带的自适应胸罩的图示。
22.图5a-5c是根据一些示例性实施例的具有交叉鸡心位支撑系带和自适应后带的自适应胸罩的图示。
23.图6a-6c是根据一些示例性实施例的具有自适应胸部接触表面和后支撑系带的自适应胸罩的图示。
24.图7a-7d是根据一些示例性实施例的具有自动调节机构的各种自适应胸罩构造的图示。
25.图8a-8b是根据一些示例性实施例的具有多个自动调节机构的自适应胸罩构造的图示。
26.图9a-9e是示出根据一些示例性实施例的机动系带引擎的示意图和附图。
27.图9f是示出根据一些示例性实施例的用于将绑带固定在系带引擎的线轴内的机构的图。
28.图10是示出根据一些示例性实施例的机动系带系统的部件的框图。
29.图11a-11e示出了根据一些示例的包括手动或自动自适应调节的各种自适应紧身衣构造。
30.图12a是描绘根据一些示例实施例的自适应袖套的线图。
31.图12b-12f是示出根据一些示例实施例的包括用于接合自动调节的自适应引擎的自适应袖套的线图。
32.图12g是示出根据一些示例性实施例的作为协调恢复系统操作的多个自适应压缩袖套和鞋类组件的线图。
33.图13a是示出根据一些示例实施例的用于操作自适应压缩袖套的技术的流程图。
34.图13b是示出根据一些示例实施例的使用自适应压缩恢复系统的恢复技术的流程图。
35.图14是示出能够执行这里讨论的各种技术的各方面的示例计算设备的框图。
36.本文提供的标题仅是为了方便起见,并不一定影响所用术语的范围或含义。
具体实施方式
37.如上所述,已经开发了具有一系列手动和自动机构的自适应支撑服装的各种示例,以实现自适应。详细讨论的例子包括自适应胸罩、自适应紧身衣和压缩袖套等。
38.自适应支撑服装系统
39.自适应支撑服装系统响应于从用户所穿的活动传感器获得的活动数据,动态地改变自适应支撑服装(例如,胸罩或紧身衣)的贴合状态和支撑性。自适应支撑系统可以包括集成到各种可穿着设备中的部件,例如鞋类、手表或支撑服装。在某些示例中,自适应支撑
系统可以通过智能手机、智能手表或与系统的其他部件无线通信的类似可穿着计算设备来控制。在其他示例中,自适应支撑系统由集成到自适应支撑服装和/或鞋类中的部件中内置的电路控制。以下附图说明了示例系统,并讨论了发明人设想的至少一些变化。
40.图1a-1b是根据一些示例实施例的包括自适应支撑服装和相关电子器件的系统的图示。在该示例中,自适应支撑服装系统1包括诸如自适应支撑服装10、鞋类组件20和智能手表30的部件。可选地,自适应支撑服装系统1还可以与智能手机35通信以控制或调节参数。在该示例中,鞋类组件20包括活动传感器25,并且自适应支撑服装10包括自适应引擎15。在该示例中,自适应引擎15联接到系带系统16(也称为自适应支撑结构16),系带系统16控制自适应支撑服装10内的自适应支撑结构。可选地,系统1还可以集成第二自适应支撑服装40,这里示出为自适应紧身衣。
41.在该示例中,鞋类组件20包括活动传感器25,活动传感器25可以包括诸如加速度计、陀螺仪、磁力计、心率传感器或全球定位传感器(gps)的传感器,以检测活动水平的变化。在一个示例中,鞋类组件20包括惯性测量单元(imu),该惯性测量单元至少结合了加速度计和陀螺仪,以为被监测的身体提供特定的力、取向或角变化率。来自imu的数据可用于检测运动,如足部撞击或步频等。在该示例中,来自活动传感器25的数据被传送到智能手表30或智能手机35用于处理,以基于来自活动传感器的活动数据来确定是否需要改变自适应支撑。在另一个例子中,活动数据库被直接发送到自适应引擎15,用于处理和确定所需的自适应支撑水平。
42.足部撞击数据只是可以从传感器(例如活动传感器25(例如imu和力传感器组合))确定的更广泛的步伐度量阵列的一部分。步伐度量可以包括各个步伐或步伐计数。可以基于诸如最小竖直力阈值、每一步伐的最小平均竖直力、最小步伐时间和最大步伐时间之类的参数来为该度量定义步伐。步伐度量还可以包括接触时间,该接触时间是使用单个力每个步伐每个足部计算的(例如,当竖直力》50n时的时间)。另一个步伐度量是摆动时间,其是使用单个力每个步伐每个足部计算的(例如,当竖直力《50n直到该脚产生力》50n的时间)。步伐度量还包括步频,步频可以定义为使用力信号时每个足部的接触时间和摆动时间之和的倒数。步伐长度是使用力信号计算的另一个步伐度量(例如,接触和摆动时间之和乘以平均速度)。另一个步伐度量是冲击,它至少可以通过两种方式计算。冲击可以是竖直地面反作用力的峰值上升率,也可以是竖直地面反作用力的主动峰值。冲量是使用力信号(例如,地面反作用力大小的积分)每个步伐每个足部计算的另一步伐度量。接触是从运动数据导出的另一个步伐度量。例如,使用以200赫兹采样的imu数据来确定足部接触时足部相对于水平面的角度。接触可以包括后足、中足和前足角度。这里讨论的任何步伐度量可以用作活动数据,或者作为其他活动数据的补充,以帮助确定活动水平,或者直接确定自适应支撑服装的目标支撑水平。
43.在该示例中,智能手表30和智能手机35中的一个或两个,单独地或彼此结合地或通过访问远程计算资源,包括控制电路,该控制电路处理活动数据并向自适应引擎15发送命令以根据需要改变支撑特性。自适应引擎15接收命令并启动机动系统,以通过与联接到自适应引擎15的集成系带系统的相互作用来调节自适应支撑结构。下面参考图9a-9d提供了示例自适应引擎的细节。
44.图1b示出了自适应支撑服装系统的用户在可能需要各种支撑水平或受益于各种
支撑水平的不同活动之间转换。在该示例中,图示在鞋类组件20内的活动传感器25操作以检测不同的活动水平,范围从放松行走到做瑜伽的适度用力到跑步中涉及的更极端的冲击和用力。在该示例中,活动传感器25向智能手表30中的控制电路传输数据,智能手表30运行基于从(多个)传感器解释的活动数据来确定当前活动水平的应用。在一些示例中,智能手表30还可以包括活动传感器,该活动传感器也向在智能手表30上操作的控制电路发送活动数据,以提供额外的活动水平信息,从而通知决定增加或减少由自适应支撑服装10(如本示例中的自适应胸罩)提供的支撑。例如,智能手表30可以包括集成心率监视器,其可以用作与活动水平相关的附加信息。
45.在舒适区中,自适应服装支撑系统1检测低水平的身体活动,该低水平的身体活动已经被确定为对应于自适应支撑服装所需的放松支撑水平。因此,控制电路命令自适应引擎15启动并调节自适应支撑服装10至舒适设置。控制应用(例如,操作控制电路的应用)可以包括用户界面,该用户界面为用户提供对自适应支撑服装的不同设置的访问。在一个示例中,设置可以包括将不同的支撑水平与不同的预定义活动水平相关联,例如休息=舒适支撑水平(例如,低支撑水平)和较高冲击=性能支撑水平(例如,高支撑水平)。可以创建其他映射,并且可以呈现用户界面以允许用户生成自定义映射。表1说明了活动水平-支撑水平映射的示例映射表。
46.活动水平支撑水平静止(不费力,无冲击)舒适-最小支撑走路(中等费力,低冲击)娱乐-适度支撑瑜伽(中度费力&冲击)运动-增强的支撑跑步(高度费力&冲击)性能-更高的支撑
47.表格1
48.如图所示,用户可以通过增加由活动传感器检测到的用力和/或冲击来从舒适过渡到较低冲击。动态地,在检测到转变时,智能手表30中的控制电路命令自适应引擎15增加自适应支撑服装10提供的支撑水平。如果用户回复到舒适活动水平(例如,休息或行走),则控制电路可以命令自适应引擎15将支撑水平放松回到舒适支撑水平。替代地,如果用户通过跑步来增加活动,则系统可以动态地响应,自适应引擎15将支撑水平增加到更高的冲击支(性能)支撑水平。
49.在某些示例中,用户可以从多个不同的活动相关参数(例如,心率、步频、冲击等)中进行选择,并将每个参数的不同水平与不同的支撑水平相关联。例如,用户可以创建使用心率和步频作为触发器的跑步活动分类。然后可以将跑步活动映射到高支撑水平。还可以通过将不同的支撑结构调节与特定的支撑水平相关联来构造支撑水平,例如基于系带系统的支撑结构的绑带拉力。下面还参考图1d讨论了校准和监测技术,这是个性化自适应支撑服装的另一种机制。
50.图1c是示出根据一些示例实施例的自适应支撑系统的组件的框图。注意,在整个申请中,自适应支撑系统也被称为自适应支撑服装系统。在该示例中,自适应支撑系统1包括诸如控制电路50、活动传感器25和自适应引擎15的部件,其中自适应引擎15集成在自适应支撑服装10内。自适应支撑服装10可以包括自适应支撑结构16。自适应支撑结构16包括围绕一个或多个绑带引导件布设的一个或多个绑带缆绳(或类似结构),以相对于自适应支
撑服装10的至少第二部分调节自适应支撑服装10的至少第一部分。绑带揽胜和绑带引导件也作为系带系统在此讨论。
51.控制电路包括处理器52、计算机可读存储设备54和通信电路56。如上所述,在一些示例中,控制电路50可以集成在智能手表30或智能手机35内(图1a)。在那些示例中,控制电路50体现于在智能手表30或智能手机35硬件上运行的操作系统(例如,ios或安卓)上的软件应用中。因此,处理器52和存储设备54将是智能手机35或智能手表30的一部分。在图示的例子中,控制电路50是独立的设备或者集成到鞋类组件或自适应引擎15中。
52.处理器52访问存储在存储设备54中的指令,以处理通过通信电路56接收的活动数据。活动数据也可以至少在处理操作期间存储在存储设备54上。处理器52还处理指令,该指令使得处理器52能够通过通信电路56生成命令并将其发送给自适应引擎15。传送到自适应引擎15的命令控制自适应引擎15的启动,以改变自适应支撑服装的支撑特性。
53.控制电路50从(多个)活动传感器25接收活动数据。在该示例中,活动传感器25可以包括imu 25a、心率(hr)传感器25b、温度传感器25c、gps 25c或应变仪25d以及能够产生指示用户活动水平的数据的其他传感器的任意组合。活动传感器25可以包括列出的传感器的任何组合,并且通过无线通信链路,例如le(低能量),将产生的活动数据传输到控制电路50。下面参考图1d讨论的技术提供了关于由控制电路50和活动传感器25提供的操作的附加细节和上下文。此外,如上所述,上述系统1的部件可以以任意组合分布在包括智能手表、智能手机、鞋类组件或自适应支撑服装(例如,集成到自适应引擎中)的设备上。
54.图1d是示出根据一些示例实施例的用于动态调节自适应支撑服装10的技术60的流程图。在该示例中,技术60包括诸如以下操作:在61调节支撑结构,在65监测支撑以及在66自动调节支撑。可选地,技术60还可以包括诸如以下操作:在62接收活动数据,在63计算活动水平,以及在64选择预定义活动分类。技术60涵盖由控制电路50、传感器25和自适应引擎15的组合执行的操作。
55.在这个例子中,技术60从61开始,即对自适应支撑服装10内的支撑结构16进行初始调节。初始调节可以包括手动和自动类型调节,自动调节与自适应引擎15协同发生。例如,控制电路50可以提供允许用户选择初始支撑水平的用户界面,例如放松。控制电路50然后可以命令自适应引擎15将自适应支撑服装10内的支撑结构16调节到放松设置。
56.在62,技术60可以可选地继续,即控制电路50从(多个)传感器25接收活动数据。活动数据可以包括生理数据,例如心率,以及描述用户身体部分的物理运动的数据。在63,技术60可以可选地继续,即控制电路50基于在62接收的活动数据计算活动水平。在64,技术60可以可选地使用计算的活动水平来选择预定义活动分类。在另一示例中,在64,技术60可以可选地包括提供用户界面,以允许用户选择预定义活动分类来启动期望的支撑水平。
57.在65,该技术继续,即控制电路50监测支撑水平的变化。支撑水平的变化可以由活动数据中的指示、计算出的活动水平或对映射到不同于当前支撑水平的支撑水平的预定义活动分类的选择来触发。如果所指示的支撑水平没有变化,则技术60通过循环回到操作62来继续。
58.如果指示了支撑水平的调节,则技术60继续到操作66,控制电路50命令调节自适应支撑服装10的支撑结构16。在该示例中,控制电路50向自适应引擎15发送调节命令。调节命令是基于选定的预定义活动分类、计算的活动水平和/或活动数据生成的。在调节支撑之
后,技术60循环回到操作62,以继续监测支撑水平变化。
59.图1e是示出根据一些示例实施例的用于动态调节自适应支撑服装10的技术的流程图。技术70可以包括诸如以下操作:在71监测活动水平,在72接收活动数据,在75确定支撑水平变化,在76发送控制命令,以及在77调节支撑。该技术还可选地包括在73计算活动水平并在74选择预定义活动分类。下面讨论的技术70在参考图1c讨论的系统1上操作,但是该技术可以在任何通用计算设备(例如,智能手机)上结合联接到自适应支撑服装10的所需活动传感器和自适应引擎来执行。
60.在这个例子中,技术70从71开始,活动传感器25监测活动水平。在72,技术70继续,控制电路50通过通信电路56从活动传感器25接收活动数据。在某些示例中,活动传感器25位于鞋类组件内,例如鞋类组件20,并且通过蓝牙le无线连接将活动数据传送到自适应引擎15内的控制电路50。在另一个例子中,活动传感器25位于智能手表30内,并通过操作系统内的通信路径与也在智能手表上运行的执行控制电路50的功能的应用通信。
61.在73,该技术可选地继续,控制电路50基于从活动传感器25接收的活动数据计算活动水平。该技术可选地在74继续,控制电路50基于计算的活动水平选择预定义活动分类。在75,该技术继续,控制电路50基于当前计算的活动水平确定自适应支撑服装的支撑水平是否需要改变。在一些示例中,支撑水平的改变至少部分基于所选择的预定义活动分类来确定。在其他示例中,支撑水平的变化至少部分地基于计算的活动水平来确定。在其他示例中,基于从活动传感器25接收的活动数据、计算的活动水平和/或选择的预定义活动分类的各种组合来确定支撑水平的变化。
62.如果控制电路50确定支撑水平需要改变,则技术70在76继续,即控制电路50向自适应引擎15发送命令以改变自适应支撑服装10的支撑水平。发送到自适应引擎15的命令可以包括根据改变是需要额外支撑还是更少支撑来增加支撑或减少支撑的命令。在某些示例中,自适应支撑服装10可以包括控制多个支撑结构的多个自适应引擎。在这些示例中,控制电路50发送命令来控制所有自适应引擎的启动,以实现期望的支撑水平。如果控制电路50确定不需要改变支撑水平,则技术60循环回到在71处监测活动水平。
63.在77,技术70完成处理循环,其中自适应引擎15通过适当地操纵联接到自适应引擎15的支撑结构16来调节自适应支撑服装10,以实现命令的支撑水平。在调节支撑水平之后,技术60返回到在71监测活动水平。
64.图1f是示出根据一些示例实施例的支撑水平校准和监测技术80的流程图。技术80概述了如何针对特定用户对自适应支撑服装10进行初始校准,以及该服装如何基于监测活动水平和在自适应支撑服装10上监测的相关参数随时间调节支撑水平。在该示例中,技术80包括诸如以下操作:在81初始化控制电路,在82接收活动数据,在83校准支撑水平,在84监测支撑特性,在85确定是否需要改变支撑水平校准,以及在86分析支撑特性数据。技术80包括初始校准自适应支撑服装以用于由用户初始使用的操作(操作81-84)和在使用期间更新支撑水平校准的操作(操作84-86)。第二组操作可以包括使用机器学习或人工智能算法来学习用户偏好并更新自适应支撑服装上的支撑水平校准。支撑水平校准调节预定义支撑水平,以解决各个用户的独特生理需求。例如,与具有dd尺寸罩杯的自适应胸罩的用户相比,具有c尺寸罩杯的自适应胸罩的用户将利用支撑结构的不同调节来获得一定的支撑水平。校准过程还可以针对使用偏好进行调节,因为一些用户与具有相似身体特征的另一用
户相比,可能自然地更喜欢更积极的支撑。
65.在这个例子中,技术80从81开始,即初始化控制电路,例如控制电路50,操作自适应支撑服装,例如支撑服装10。初始化控制电路包括接通自适应支撑服装并准备控制电路来操作自适应支撑服装。在82,技术80继续,控制电路50例如从(多个)传感器25接收活动数据。在初始校准期间,用户被指示执行特定的锻炼或重复运动来辅助校准。在82,控制电路接收来自这些特定运动的数据。在83,技术80继续,控制电路50使用通过执行已知的身体运动而产生的活动数据来为自适应支撑服装的用户校准初始支撑水平。选择已知的物理运动来调用将被受影响的、受自适应支撑服装支撑的某些软组织。收集的表征该软组织运动的数据包括在用于执行校准的活动数据中。例如,自适应胸罩可以包括设置在胸部接触表面和/或肩带内的传感器,其可以表征已知的运动期间胸部组织的运动。
66.一旦在83完成初始校准,技术80可以从84开始转换到监测/学习模式。操作84至86可以独立作为自适应支撑系统1的持续监测/学习操作模式。在84,技术80继续,其中控制电路50监测支撑特性,其可以包括如上所述的活动数据。在85,技术80继续,控制电路基于监测到的支撑特性确定支撑水平校准是否需要更新。如果支撑水平校准不需要改变,则技术80循环回到84以继续监测支撑特性。如果支撑水平校准确实需要改变,则技术80可选地继续到86以分析支撑特性数据,以便于更新支撑水平校准。然后,技术80继续循环回到83,并基于分析更新校准的支撑水平。
67.自适应胸罩
68.根据胸罩(或其他支撑服装)的穿着者所经历的活动,胸罩的期望贴合状态可能会改变。例如,在安静(放松)的活动期间,穿着者可能更喜欢比活动期间具有更小压力和拉力的胸罩。然而,在改变活动水平时,穿着者可能没有机会将具有第一贴合状态的第一胸罩更换为具有不同贴合状态的第二胸罩。此外,穿着者可以受益于能够随着穿着者从活动过渡到活动而动态适应的胸罩。此外,在不同的活跃的活动期间,穿着者可以受益于不同类型的额外支撑。目前,胸罩的用户可以针对一个活动水平选择胸罩,而不管在穿着期间经历的其他活动状态。这种选择导致所选胸罩不是某些活动的首选。
69.因此,一种在穿着时可调节的自适应胸罩,以根据用户的希望或需求来改变贴合特性,提供了不同支撑水平的好处,提高了所有活动的舒适水平。例如,胸罩的第一贴合状态可以支撑安静的活动,提供舒适的贴合,允许胸部组织的运动,同时提供温和的支撑。然后,胸罩可以响应于增加的活动而自动调节,或者由穿着者(例如手动)调节到第二贴合状态,该第二贴合状态增加了施加到胸部组织的力,以在较高冲击活动期间稳定和固定胸部组织。例如,穿着者可以在去参加体育活动的旅行期间使胸罩处于第一贴合状态,并且穿着者可以在开始体育活动时将胸罩调节到第二贴合状态。在体育活动之后,穿着者可以再次将胸罩的贴合状态改变回第一贴合状态。胸部组织和周围软组织在各种活动之间会经历剧烈的运动变化,这可以通过加速度大小的变化来测量。这种测量可以是动态自适应胸罩的一个输入,例如本文讨论的那些。注意,胸部组织被用作上面的例子,但是自适应支撑概念适用于在某些活动期间可以从增加的支撑中受益的任何身体组织。
70.自适应胸罩可以包括在胸部接触表面处、在桥接部处的胸部接触表面之间、在肩带处、在翼部处和/或沿着背部以及其他地方的胸部组织上的可调节性。可调节性包括带收紧-放松、带加宽、鸡心位(桥接部)收紧、条带收紧、包封和胸部塑形等。
71.图2a是根据一些示例性实施例的自适应胸罩的可调节区的图示。在这个例子中,胸罩200a可以包括多个自适应区。自适应区可以包括下条带210、胸部接触表面尺寸212、带宽度214、鸡心位216、带长度218和压缩部(翼)220。在一些示例中,附加的自适应区可以以胸部形状为目标(在图2a中未具体示出)。下条带210调节可以包括收紧或放松以改变胸部支撑和/或胸部提升。在传统的运动胸罩中,穿着者胸部高达60%的负荷由围绕肋骨区域的下条带210承载。胸部接触表面尺寸212调节可以提供自适应胸罩200a的胸部接触表面尺寸的三维变化,例如通过动态衬垫系统或结构化空气枕。动态衬垫系统包括美国专利公开2018/0140928中讨论的那些,标题为“article of apparel with dynamic padding system”,其全部内容通过引用并入本文。胸部接触表面尺寸212的调适也可以包括形状的调节。在某些条件下,带宽度214的调节可以将胸罩带上的负荷分布在更宽的面积上。在一个示例中,带宽度214的调节可以使用拉胀材料来实现。拉胀物是具有负泊松比的结构或材料。拉胀材料在拉伸时,垂直于施加的力会变得更厚。增厚是由于样品单轴加载时内部结构导致的特殊变形。拉胀物可以是单分子、晶体或宏观物质的特定结构。拉胀材料和结构被期望具有机械性能,例如高能量吸收和抗断裂性。
72.鸡心位216调节可以调节胸部接触表面相对于彼此的定位,从而提供胸部的包封或分离。带长度218调节区在多个示例位置中示出,并且提供调节提升和/或尺寸型贴合状态调节的能力。在传统的运动胸罩中,穿着者胸部高达40%的负荷由带在肩部和背部承担。压缩部220调节允许在与下条带210分离的胸部接触材料上进行调节。在一些示例中,使用后调节机构(或自适应支撑结构)来执行压缩调节。在高冲击活动(如跑步)期间,可以利用胸部压缩来稳定胸部组织。如上所述,自适应胸罩的穿着者在一系列具有不同程度冲击的活动中受益于自适应支撑,例如从步行到瑜伽到跑步。每个不同的活动提出了不同的支撑挑战。例如,在瑜伽期间,穿着者受益于中度的支撑,同时允许极度的灵活性。相比之下,跑步需要最大限度的支撑,而灵活性可能并不重要。
73.图2b是示出根据一些示例实施例的抑制胸罩的图。在该示例中,抑制胸罩200b是可由穿着者调节以调节胸部组织的运动抑制程度的自适应支撑服装(自适应胸罩)。在该示例中,可调节抑制胸罩200b包括第一胸部接触表面部分232、第二胸部接触表面部分234和在第一胸部接触表面部分和第二胸部接触表面部分之间延伸并连接它们的桥接部236。第一胸部接触表面部分232、第二胸部接触表面部分234和桥接部236可以由共同的材料或共同的材料集合形成。例如,它们可以由相对于胸罩的其他部分而言的相对低拉伸(例如,相对高弹性模量)的材料形成。弹性模量是基于拉伸应力相对于沿拉伸轴线的拉伸应变来测量的。当在此讨论时,当讨论相对弹性模量时,第一材料上的拉伸轴线平行于第二材料中的拉伸轴线。例如,如果第一部分比胸罩200b的第二部分具有更低的弹性模量,则第一部分和第二部分的拉伸轴线在所形成的物品中是平行的(例如,当胸罩200b处于由传统穿着者穿着的构型时,两者都是竖直的)。
74.在抑制胸罩200b中,桥接部236具有上部分240和下部分242。抑制胸罩还包括在桥接部上部分238和桥接部下部分230之间延伸的调节器246(如图2c所示)。调节器246可在第一长度和较短的第二长度之间调节。调节器可以是用胸罩材料、带或其他元件(例如绳)连接的调整件(例如,具有带扣、横档、扣环、钩等的硬件)。另外,在一些示例中,调节器可以是(或联接到)提供自动或穿着者启动的调节的自适应引擎。
75.抑制胸罩200b可以通过调节器246的调节来抑制胸部组织的运动(参见图2c)。例如,当调节器246减小上部分238和下部分230之间的距离时,从凝聚的材料产生聚束纹理。距离的这种缩短将胸部接触表面拉得更近,这限制了胸部组织能够填充的空间体积。这种体积的减小在胸部组织上产生压缩力,当穿着者进行身体活动时,该压缩力转化为运动抑制结果。
76.本文的方面描述了物质组织层。组织层是可能具有不同于其他材料组织层的特性(例如,物理、化学、外观)的材料层。例如,多层针织材料可以使所有层同时针织,但是其中一层可以具有不同于其他层的特性(例如,材料或纱线选择、着色、缝合技术、针织结构类型、针织缝合顺序等)。类似地,层压材料可以由两种或多种材料以永久方式粘合在一起形成,但是每种原始材料在层压材料中形成不同的组织层。因此,本文的各个方面讨论了材料阻止层,其指的是与其他层可分离或不可分离的层。在可调节胸罩中,不可拉伸材料可以被包裹或层叠在第一可拉伸材料身体面和第二可拉伸材料外部面之间。术语“非拉伸”是相对于术语“拉伸”而言的。例如,“非拉伸”材料比拉伸材料具有更小的拉伸性(例如,具有更高的弹性模量)。在一个示例性方面,“非拉伸”材料可以用足够的力伸长,但是它需要比拉伸材料更大的力或者伸长得更少。
77.图2c是根据一些示例实施例的自适应抑制胸罩的图示。图2c中所示的抑制胸罩200c包括自适应引擎250、压缩系带255和用户启动绳(例如调节器246)。调节器246可以启动自适应引擎250,其可以缩短压缩系带255以启动抑制胸罩200c的运动抑制。在一些示例中,自适应引擎250可以包括外部释放按钮,穿着者可以启动该按钮来释放压缩系带255上的拉力并减少运动抑制。
78.图3a-3b是根据一些示例性实施例的具有连续支撑结构的自适应胸罩300的后视图。自适应胸罩300示出了为穿着者提供自适应支撑的示例支撑结构(例如系带305)。自适应胸罩300包括诸如系带305、手动拉环310、调节器315、引导件320、绑带毂325和锚接片330的部件。自适应胸罩300利用连续系带305支撑结构,该支撑结构围绕下条带、在胸部接触材料之间向上并且在每个肩带上延伸。系带305由引导件320引导穿过自适应胸罩300上的期望位置。引导件320可以是织物通道、管道或材料隧道,其可以沿着绑带路径的更重要部分延伸,以提高支撑性和舒适性。在某些示例中,引导件320由针织部件形成,例如下面参考图3c讨论的针织部件350。自适应胸罩300包括手动调节器315,其允许穿着者通过手动拉环310启动自适应支撑。如下文进一步讨论的,在各种自适应支撑服装中示出的所有支撑结构可以具有集成的自动自适应引擎,以实现全自动或半自动的可调节性。
79.自适应胸罩300包括沿衣服后侧上的下条带定位的绑带毂325。绑带毂325将连续系带305从肩部绕下条带侧向向下布设。绑带毂325被示出为简单的三角形开槽结构,但是也可以利用小滑轮或固定的圆形绑带引导件作为替代结构的例子。在一些示例中,绑带毂325可以用系带引擎代替,以提供自动或半自动调节和绑带布线。下面参考图9a-9e讨论示例自适应引擎。
80.自适应胸罩300上所示的系带结构可以促进胸部组织隔离、下条带压缩和通过肩带压缩力实现的提升。
81.图3c是描绘针织管352的示例的线图,其中针织管352由多层针织结构形成,例如管状针织结构。管状针织结构可以通过任何合适的管状针织技术形成,例如通过纬编技术,
例如圆形针织或平针织,或者通过经编技术等。作为一个例子,在平针织机上的管状针织过程可以包括在针织机的第一针床上形成的第一针织层,该第一针织层在多个路线中保持与在第二针床上形成的第二针织层分离(例如,具有未锁定到第二针织层的中心区域)。例如,参考一个针织管352的特写视图,管352的可以限定针织部件350的外表面356的第一层354可以形成在针织机的第一针床上(例如,具有单面针织或类似的针织结构)。针织管352的第二层358可以限定针织部件350的内表面,该第二层358可以形成在针织机的第二针床上(例如,具有单面针织或类似的针织结构)。针织管352的边缘360、362(沿着管的长度延伸)可以是管状针织结构的端部的路线(在针织方向上)利用两个针床的位置,从而将第一层354和第二层358锁定在一起。在最终的针织部件350中,通道/隧道可以形成在针织管352的第一层354和第二层358之间,并且该相同的通道可以用于接收拉伸股线(例如,绑带)370。
82.这里讨论的自适应服装可以利用针织管,例如针织管352来将形成自适应支撑结构的系带缆绳穿过每件服装。例如,上面讨论的任何自适应胸罩都可以包括肩带和带下条带部分以及其他部分,这些部分包括编织管以容纳作为集成自适应支撑结构的一部分的绑带缆绳。上面讨论的所有自适应胸罩和紧身衣的例子都可以由包含在类似于这里讨论的针织部件350的针织管或通道结构内的系带系统的至少一部分构成。穿过针织部件350布设绑带缆绳通过隐藏系带系统提供了美学上的改进,并且还分散了来自系带系统的力,以改善穿着者的舒适性和支撑性。
83.图4a-4d是根据一些示例性实施例的具有交叉后支撑系带的自适应胸罩400的图示。自适应胸罩400提供了包括右调节器405a和左调节器405b的另一种自适应支撑结构的图示,其可以用自适应调节引擎代替。自适应胸罩400还包括图4b所示的后系带罩410。图4c和4d示出了后系带覆盖物410被拉回的后自适应支撑结构。后自适应支撑结构包括系带415、绑带滑轮420、调节引擎425、调节器430和下条带435。在这个例子中,系带415在自适应胸罩400的后部分形成交叉模式,从沿着下条带定位的调节引擎425延伸到肩带上的锚固点。系带415穿过自适应胸罩400两侧的一系列绑带滑轮420。绑带滑轮420锚固在提供下条带和鸡心位类型调节的位置。后自适应支撑结构也锚固在肩带上,以通过肩带同时提供提升支撑。
84.自适应胸罩400上所示的调节机构包括右调节器405a和左调节器405b,以及沿着后下条带的自适应引擎425。右/左调节器405a、405b提供直接的下条带调节,而自适应引擎425通过系带415张紧后支撑结构。在这个例子中,自适应引擎425通过调节器430被手动启动。在其他示例中,自适应引擎425可以用自动或半自动调节引擎代替,以提供穿着者或传感器启动的自动调节。在某些示例中,调节引擎可以适于调节系带415和下条带,这可以消除对手动右/左调节器405a/405b的需要。在一些示例中,多个自适应引擎用于分别提供系带415和右/左调节器405a/405b的单独自动调节。
85.图5a-5c是根据一些示例性实施例的具有交叉鸡心位支撑系带和自适应后带的自适应胸罩500的图示。在该示例中,自适应胸罩500包括交叉系带530形式的前支撑结构,以调节胸部接触表面505。前支撑结构还包括沿着每个胸部接触表面505的内侧部分支撑系带锚515的中央锚固覆盖件510。中央锚固覆盖件510由比胸部接触表面505的其余部分更硬的材料形成,以帮助分配来自交叉系带530的力。系带530锚固在外侧锚520a和外侧锚520b上,延伸至右肩锚525a和左肩锚525b。系带530从右/左肩锚525a、525b落入由沿着胸部接触表
面505的内侧边缘分布的绑带锚515形成的交叉模式中。前支撑结构通过调节器535进行调节,在该示例中,调节器535是手动拉动调节机构,提供张紧系带530的能力,如图5b所示。
86.如图5b所示,自适应胸罩500的前支撑结构可以产生鸡心位拉力以及通过肩带提升。在这个例子中,胸部接触表面505基本上是非弹性的材料,当前支撑结构被张紧时(如图5b所示),该非弹性的材料为胸部组织提供额外的包封和支撑。在另一个例子中,中央锚固覆盖件510是设计成保持所需形状和分配载荷的刚性材料,而胸部接触表面505是提供支撑和舒适的较软弹性材料。
87.自适应胸罩500的后侧在图5c中示出,并且包括支撑带540、带调节550和下条带锚545。带调节550提供了单独的初始调节机构,以允许自适应胸罩500适合更大范围的尺寸。如图所示,自适应胸罩500还包括沿着支撑带540下方的下条带的更传统的钩环闭合件。
88.图6a-6c是根据一些示例性实施例的具有自适应胸部接触表面和后支撑系带的自适应胸罩600的图示。在这个例子中,自适应胸罩600包括聚焦于胸部形状的自适应支撑结构和通过前部结构的提升以及通过后部结构的鸡心位和下条带张紧。前支撑结构包括胸部接触表面605、系带615、绑带引导件620,其中调整件610提供了围绕自适应胸罩600的外围部分的尺寸结构。
89.胸部接触表面605可以包括基本上非弹性(或者至少与周围的非支撑材料相比弹性较小)的材料,其轮廓形成为当拉力施加到系带615时提供特定的胸部组织成形。在该示例中,轮廓包括形成在胸部接触表面605的上部分中的两个狭槽606,狭槽606允许材料包裹胸部组织并在施加拉力时提供提升和一些压缩。胸部接触表面605包括位于分离部分的上端的三个分离的绑带引导件615。在这个例子中,绑带引导件615由卷边材料形成,产生材料通道。在其他示例中,绑带引导件可以是塑料管,根据设计成自适应胸罩的所需形状,塑料管具有不同程度的刚性。
90.自适应胸罩600的后部结构在图6c中示出,隐线展示了系带615、锚625和下条带635在自适应胸罩600内布线。如图所示,系带615形成从肩带向下延伸的交叉结构,其中系带615从前侧横向延伸。交叉模式允许自适应引擎630一致地向下条带、鸡心位和前部结构提供拉力。后支撑结构可以通过调节器640启动,在这个例子中,调节器640是拉片。在其他示例中,调节器640可以包括拉力和释放按钮或单独的拉片。
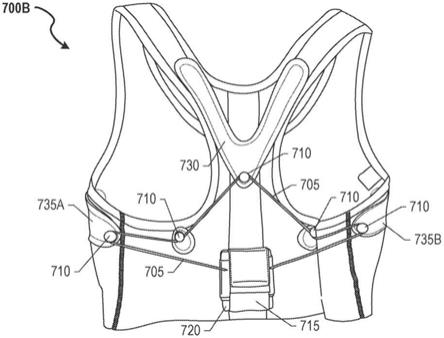
91.图7a-7d是根据一些示例性实施例的具有自动调节机构的各种自适应胸罩700构造的图示。这些图中示出的自适应胸罩700的例子是相似的,但是绑带引导件710的数量和位置不同,这允许产生不同的支撑自适应。图7a示出了自适应胸罩700a,其包括两(2)个绑带引导件710,绑带引导件710被定位成向右翼和左翼施加拉力,这提供了跨胸部组织和鸡心位区域的增强的压缩。图7b示出了自适应胸罩700b,其包括五(5)个绑带引导件710,其定位成向肩带和翼区域施加拉力。图7c示出了自适应胸罩700c,其包括七(7)个绑带引导件,其以集中在鸡心位和下条带张紧上的模式分布。图7d示出了自适应胸罩700d,其包括九(9)个绑带引导件710,与图7c中的模式相比,这九(9)个绑带引导件710定位成通过肩带产生额外的拉力。
92.自适应胸罩700的所有变型包括连续绑带缆绳705、绑带引导件710、系带引擎袋715和系带引擎720(在此也称为自适应引擎)。系带引擎可以包括敞开线轴构造,以能够移除系带引擎720,用于清洗衣服、给内部电池充电或更换。连续绑带缆绳705由系带引擎720
的线轴接合,以向自适应胸罩700提供自动或半自动调节。在这个例子中,绑带引导件710是圆形敞开绑带引导件,但是也可以使用替代的绑带引导件。例如,可以实施封闭的管状绑带引导件,以避免连续绑带缆绳脱离的任何可能性。在其他示例中,绑带引导件710可以包括在使用期间保持绑带的卡扣式覆盖物。每个绑带引导件710安装在加强织物覆盖件上,以帮助分配绑带力和支撑服装的寿命。
93.图7a所示的自适应胸罩700a是包括两个绑带引导件710、连续绑带缆绳705和用于接收系带引擎的系带引擎袋715的极简自适应支撑服装的示例。自适应胸罩700b增加了三个附加的绑带引导件710。其中一个附加的系带引导件710固定在肩带锚固覆盖件730上,该肩带锚固覆盖件730在张紧绑带缆绳705时将力分配到肩带上。自适应胸罩700b还包括左翼带735a和右翼带735b,它们每个包括绑带引导件710。添加到自适应胸罩700b的其余两个绑带引导件710(与700a相比)主要操作用于将绑带缆绳705从暴露的组织中引出。自适应胸罩700c包括七(7)个略微不同构造的绑带引导件710,其将自适应调节集中在左翼区域735a、右翼区域735b、左下条带区域740a和右下条带区域740b上(注意,自适应胸罩700c在翼或下条带区域不包括带或覆盖件)。相比之下,自适应胸罩700d在翼区域、下条带区域包括带或覆盖加强件,并锚固肩带。更具体地,自适应胸罩700d包括九(9)个绑带引导件710,绑带引导件固定到肩带锚固覆盖件730、左翼带735a、右翼带735b、左下条带740a和右下条带740b。因此,自适应胸罩700d被构造成调节下条带、翼区域和肩带中的支撑,从而调节胸部组织的压缩和支撑。
94.图8a-8b是根据一些示例实施例的具有多个自动调节机构(例如,自适应引擎)的自适应胸罩800构造的图示。在一个示例中,自适应胸罩800a示出了包括三个独立调节区的后支撑结构,每个调节区包括独立的自适应引擎袋835,以保持用于自动或半自动调节的自适应引擎。自适应胸罩800a包括下条带区,绑带缆绳805联接到下条带830并延伸穿过下(尾部)自适应引擎袋835c。该示例还包括带有联接到锚820的绑带缆绳810的翼区,锚820将绑带缆绳810上产生的拉力分布在沿着自适应胸罩800a的侧向侧的广阔区域上。绑带缆绳810由位于中央自适应引擎袋835b内的中间自适应引擎调节。锚820可以是滑轮、圆形锚、管状绑带引导件或织物环等。在这个例子中,鸡心位区绑带缆绳810被实现为单根绑带缆绳,其从与自适应胸罩800a后部的一部分交叉的下左侧锚延伸到上右侧锚。在其他示例中,鸡心位区绑带缆绳810可以被实现为三个单独的绑带缆绳(参见图8b),或者绑带缆绳的一些其他组合。在图8b中,三个独立的绑带缆绳810都穿过中央自适应引擎840b布线,用于同时调节。自适应胸罩800a还包括肩部区,该肩部区具有从右肩到左肩穿过上(头部)自适应引擎袋835a的双绑带缆绳815。
95.图8b所示的自适应胸罩800b包括在自适应引擎口袋835内的系带(自适应)引擎840a-840c。系带引擎840a用于调节肩部区绑带缆绳815,这将在自适应胸罩800b前侧的胸部接触表面上提供肩带调节和额外提升。系带引擎840b用于调节鸡心位区绑带缆绳810,从而夸胸部接触表面提供压缩。系带引擎840c用于调节下条带区绑带缆绳805,并为自适应胸罩800b的下调带提供张紧支撑。
96.如下面进一步详细讨论的,系带引擎840a-840c可以通过手动输入(例如,半自动)或响应于指示诸如活动水平或绑带缆绳上的拉力的传感器输入来操作。
97.形状控制
98.特别是在试图为各种胸部结构提供不同程度支撑的自适应胸罩中,调节胸部接触表面的能力是有用的。上面讨论的一些例子提供了自适应支撑结构,其包括控制或调节胸部接触表面的形状的一些能力。开发用于动态填充系统的自适应支撑结构可用于提供不同水平的形状控制。动态衬垫系统的细节可以在美国专利公开2018/0140928中找到,标题为“article of apparel with dynamic padding system”,其在上文通过引用并入。
99.在一个例子中,自适应胸罩的胸部接触表面可以利用在动态衬垫系统应用中讨论的动态衬垫系统的变体。用于动态衬垫系统的控制系带可以被引导到自适应引擎,以提供对自适应胸罩内的动态成形结构的自动或半自动控制。
100.自适应支撑结构-系带系统
101.上面已经参照图2a-8b讨论了用于自适应胸罩的各种不同的自适应支撑结构。这些自适应支撑结构通常包括穿过各种绑带引导件、管或织物锚的系带系统。在其他示例中,系带系统可以嵌入用于构建自适应支撑服装的纺织品中。纺织品可包括针织纺织品、织造纺织品和非织造纺织品、编织纺织品等。例如,纺织品可被生产成包括或组装成管或隧道,用于各种系带系统的绑带缆绳可在其中布线。
102.在利用针织纺织品的一个例子中,可以利用被称为平针织的纬编过程(以及其他编织过程)来形成用于自适应支撑服装的针织部件。各种特征可以结合到针织部件中。例如,针织部件可以限定由整体针织结构形成的管,并且股线(绑带缆绳)可以延伸穿过管的长度。作为另一个例子,针织部件可以具有由整体针织结构形成的一对至少部分地共同延伸的针织层,并且多根浮纱可以在针织层之间延伸。在一些构造中,针织类型或纱线类型可以在针织部件的不同区域变化,以赋予不同的性能。此外,针织部件可以结合热塑性纱线,该热塑性纱线在针织部件的不同区域熔合以赋予不同的性能。美国专利第8,745,896号,标题为“article of footwear having an upper incorporating a knitted component”包括关于如何利用针织纺织品来制造用于布线系带系统的织物管或隧道的额外细节。美国专利第8,745,896号在此以其整体通过引用并入本文。
103.针织过程可用于镶嵌纱线、股线或缆绳,其可用于这里讨论的系带系统。在针织部件的制造过程中,缆绳(纱线或股线)的至少一部分可以镶嵌在针织机上的针织部件的某些环之间。缆绳可以在编织过程中插入编织管内,例如通过利用镶嵌过程。例如,镶嵌过程可以包括在针织过程中使用针织机上的镶嵌进给器或其他机械镶嵌装置(例如,组合进给器)来将缆绳放置在两个针床(例如,前针床和后针床)之间。在2013年6月13日公布的美国专利申请公开号2013/0145652中描述了镶嵌过程的一个例子,以及用于实现这种过程的组合进给器,该专利申请具有nike,inc.的申请人,该专利申请通过引用以其整体并入本文。替代地,可以用手和/或其他合适的方法将缆绳进给穿过针织部件的针织管。可以设想,缆绳可以以不同的方式(例如,除了位于管中之外)附接到系带系统的其余部分,例如通过使用粘合剂将缆绳直接固定到支撑结构或系带系统的部件上,如本文所述。
104.针织管通常是由两个重叠且至少部分共同延伸的针织材料层形成的中空结构(例如图3c所示和上面讨论的)。尽管形成管的一层针织材料的侧面或边缘可以固定到另一层(例如,如果两层结构延伸超过管),但是中心区域通常是不固定的,使得另一元件(例如,缆绳)可以位于两层针织材料之间并穿过管。
105.更具体地,管可以由多层针织结构形成,例如管状针织结构。管状针织结构可以通
过管状针织过程形成,其中对于多个路线,针织机的第一针床上形成的第一针织层保持与在第二针床上形成的第二针织层可分离(例如,具有未锁定到第二针织层的中心区域)。例如,可以限定针织部件的外表面的管的第一层可以形成在针织机的第一针床上(例如,具有单面针织或类似针织结构)。可限定针织部件内表面的管的第二层可形成在针织机的第二针床上(例如,具有单面针织或类似针织结构)。管的边缘(沿着管的长度延伸)可以对应于管状针织结构的端部(在针织方向上)的路线利用两个针床的位置,从而将第一层和第二层锁定在一起(尽管在一些实施例中,离散的层可以可选地以固定的方式继续通过边缘)。在所得的针织部件中,可以在管的第一层和第二层之间形成通道/隧道,并且可以使用相同的通道来接收缆绳。
106.例如,上述纱线、股线或缆绳可包括具有丝(例如单丝)、复丝、股线、纱线、线、绳、网、缆绳或链构型的镶嵌股线。与形成针织元件(例如自适应支撑服装10)的纱线相比,镶嵌股线的厚度可以更大。在一些构造中,镶嵌股线可以具有比针织元件的纱线大得多的厚度。尽管镶嵌股线的横截面形状可以是圆形、三角形、正方形、矩形、椭圆形或不规则形状,但也可以使用。此外,形成镶嵌股线的材料可以包括针织元件内的纱线的任何材料,例如棉、弹性纤维、聚酯、人造丝、羊毛和尼龙。如上所述,镶嵌股线可能比针织元件的其余部分表现出更大的抗拉伸性。因此,用于镶嵌股线的合适材料可以包括用于高抗拉强度应用的各种工程丝,包括玻璃、芳族聚酰胺(例如对位芳族聚酰胺和间位芳族聚酰胺)、超高分子量聚乙烯和液晶聚合物。作为另一个例子,编织聚酯线也可以用作镶嵌股线。
107.贯穿本公开讨论的系带系统仅代表了能够在自适应支撑服装内提供所需支撑的一些示例性布置。其他系带结构可以从相关的服装或鞋类中进行改适。例如,美国专利公开2019/0116935(标题为“lacing architecture for automated footwear platform”)和美国专利公开2018/0110298(标题为“lacing architecture for automated footwear platform”)中公开的自动系带鞋类平台都公开了可适用于自适应支撑服装的系带结构。美国专利公开2019/0116935和2018/0110298以其整体通过引用并入本文。
108.传感器和控制系统
109.为了响应于身体活动的变化而有效且自动地操纵自适应支撑服装,控制系统需要能够收集指示与自适应支撑服装相关的身体部分如何移动和/或在自适应支撑服装的部分上经受的压力的数据。诸如运动跟踪传感器和力测量传感器(例如,应变仪)的传感器是可以用来提供所需数据的传感器的例子。
110.力传感器可以嵌入自适应支撑服装的相关部分,可以是用户穿戴的单独装置,和/或集成到自适应调节引擎中,以检测施加到自适应支撑服装内的支撑结构的力。响应于力的变化,可以进行不同的调节来抵消这些力。例如,传感器可以用来检测在自适应胸罩的肩带上经受的冲击力。冲击力数据可以被解释为指示自适应胸罩应该向穿着者提供的压缩或胸部组织隔离的水平。
111.除了嵌入自适应支撑服装中的力传感器之外,或者代替之,该服装可以包括拉伸电容传感器,以监测增加的活动水平。在一个示例中,自适应支撑服装可以在关键位置包括一个或多个可拉伸电容传感器,例如肩带、下条带和/或与用于本文讨论的各种自适应支撑结构和系带系统的锚固点相关联。可拉伸电容传感器可以检测指示穿着者的活动水平的运动,并且来自这些传感器的信号可以由这里讨论的控制电路处理,以确定自适应支撑服装
的期望支撑水平。
112.关于可拉伸电容传感器的相关实现的额外细节可以在美国专利公开2019/0059461中找到,该专利公开的标题为“sense-enabled apparel”,出于任何和所有非限制性目的,该专利公开的内容以其整体并入本文。美国专利中公开了根据各种实施例可以使用的可拉伸电容传感器的例子。第7,958,789号和wo 2014/204323号,出于任何和所有非限制性目的,其内容以其整体并入本文。上面讨论的控制电路50也可以利用传感器输入来触发集成到自适应服装中的照明。照明可以被集成以用于夜间活动的安全。
113.在一些示例中,运动跟踪传感器用于检测自适应支撑服装的穿着者的活动水平。运动跟踪传感器,如惯性测量单元(imu),能够跟踪多达六个自由度(dof),并可应用于各个身体部分,为监测自适应支撑服装的控制系统提供反馈。其中一种传感器来自一家名为polhemus的公司(https://polhemus.com/micro-sensors/),但其他制造商也提供类似的传感器。6-dof运动传感器能够捕捉位移度,包括线性和旋转位移、运动频率和/或运动速度,最高可达六个个运动度。在自适应胸罩的例子中,通过将传感器与胸部结构相关联,特别是与胸部结构的乳头区域相关联,传感器能够准确地捕捉胸部结构在运动期间经历的位移。此外,由于乳头区域通常代表胸部组织的最前面,将传感器定位在该位置使得传感器能够捕获胸部结构所经历的最大位移量。自动自适应胸罩内的控制系统可以利用该传感器数据(例如,位移数据、频率和速度数据)来自适应地调整支撑结构,以补偿随着活动水平变化而收集的数据的变化。上面的描述旨在解释和/或增强先前关于(多个)感器25的讨论,传感器25在全文中也被称为活动传感器。
114.自适应调节引擎
115.下面讨论在上面讨论的一些自适应胸罩示例中用作自适应调节引擎的机动系带引擎示例。尽管本公开内容的大部分聚焦在机动系带引擎上,但是所讨论的许多机械方面适用于人力系带引擎或具有额外或更少功能的其他机动系带引擎。因此,在“自适应服装”或“自动服装平台”中使用的术语“自动”或“自适应”不旨在仅涵盖在没有用户(例如,手动)输入的情况下操作的系统。相反,术语“自动/自适应服装平台”包括各种电动的和人力的、自动启动的和人力启动的机构,用于这里讨论的自适应支撑系统。
116.在一个示例中,自适应支撑系统可以包括或被构造为与一个或多个传感器接口,所述传感器可以监测或确定动态物理特性,例如胸部(例如软组织)加速度或位移。基于来自一个或多个传感器的信息,自适应支撑系统,例如上面讨论的并且包括机动系带引擎(这里也称为自适应引擎)的自适应胸罩之一可以被构造成执行各种功能。例如,传感器可以被构造成通过调节支撑结构来检测自适应支撑系统可以对其做出反应的活动水平。在一个示例中,自适应服装物品包括能够接收或解释来自传感器的信号的处理器电路。处理器电路可以可选地嵌入系带引擎900中或与系带引擎900一起嵌入。
117.参照图9a-9f详细描述系带引擎900的例子。图9a-9e是示出根据一些示例性实施例的机动系带引擎的示意图和附图。注意,图9a-9f的参考标号可能与本公开其他部分中使用的参考标号重叠或重复。图9a介绍了示例系带引擎900的各种外部特征,包括外壳结构905,壳体螺钉908,绑带通道910(也称为绑带引导凸起910),绑带通道壁912,绑带通道过渡部914,线轴凹部915,按钮开口920,按钮921,按钮膜密封件924,编程标头928,线轴930和绑带凹槽932。
118.在一个示例中,系带引擎900通过一个或多个螺钉(例如壳体螺钉908)保持在一起。壳体螺钉908定位在主驱动机构附近,以增强系带引擎900的结构完整性。壳体螺钉908还起到辅助组装过程的作用,例如将壳体保持在一起以对外部接缝进行超声波焊接。
119.在该示例中,系带引擎900包括绑带通道910,该绑带通道一旦被组装到自动鞋类平台中就接收绑带或绑带缆绳。绑带通道910可包括绑带通道壁912。绑带通道壁912可包括斜切边缘,以在操作期间提供用于绑带绳延伸的平滑引导表面。绑带通道910的平滑引导表面的一部分可以包括通道过渡部914,该通道过渡部114是绑带通道910的通向线轴凹部915中的加宽部分。线轴凹部915从通道过渡部914过渡到大致圆形的部分,这些圆形部分与线轴930的轮廓紧密一致。线轴凹部915有助于保持绕线轴的绑带绳以及保持线轴930的固位置。然而,设计的其他方面提供线轴930的主要保持。在该示例中,线轴930的形状类似于溜溜球的一半,具有穿过平坦的顶表面延伸的绑带凹槽932和从相反侧下方延伸的线轴933(图9a中未示出)。线轴930在下面参考另外的附图被更详细地描述。
120.系带引擎900的侧面包括按钮开口920,按钮开口120使用于激活机构的按钮921能够延伸穿过外壳结构905。按钮921提供了用于激活开关922的外部接口,如下面讨论的其他附图所示。在一些示例中,外壳结构905包括按钮膜密封件924,以提供防灰尘和水的保护。在该示例中,按钮膜密封件924是从外壳结构905的上表面在拐角上并且在侧面向下粘附的高达几密耳(千分之一英寸)后的透明塑料(或类似材料)。在另一示例中,按钮膜密封件924是2密耳厚的乙烯基粘合剂背衬膜,其覆盖按钮921和按钮开口920。
121.图9b是根据示例实施例的系带引擎900的各种内部部件的图示。在该示例中,系带引擎900还包括线轴磁体136、o形环密封件938、蜗杆传动940、衬套941、蜗杆传动键942、齿轮箱944、齿轮马达945、马达编码器946、马达电路板947、蜗轮950、电路板960、马达头部961、电池连接962和有线充电头部963。线轴磁体936通过磁力计(图9b中未示出)的检测来帮助跟踪线轴930的运动。o形环密封件938起到密封灰尘和湿气的作用,这些灰尘和湿气可能围绕线轴的轴933迁移到系带引擎900中。
122.在该示例中,系带引擎900的主要驱动部件包括蜗杆传动940、蜗轮950、齿轮马达945和齿轮箱944。蜗轮950被设计成抑制蜗杆传动940和齿轮马达945的反向驱动,这意味着通过线轴930从系带缆绳进入的主要输入力被分解在相对较大的蜗轮和蜗杆传动齿上。这种布置保护齿轮箱944不需要包括足够强度的齿轮,以承受主动使用自适应服装的动态载荷或张紧系带系统的张紧载荷。蜗杆传动940包括辅助保护传动系统更脆弱部分的附加特征,例如蜗杆传动键942。在该示例中,蜗杆传动键942是蜗杆传动940的马达端部中的径向狭槽,其与穿过从齿轮箱944出来的驱动轴的销对接。这种布置通过允许蜗杆传动940在轴向方向(远离齿轮箱944)上自由移动,将这些轴向载荷传递到衬套941和外壳结构905上,防止蜗杆传动940在齿轮箱944或齿轮马达945上施加任何轴向力。
123.图9c是根据示例实施例的系带引擎900的横截面图。图9c有助于说明线轴930的结构以及绑带凹槽932和绑带通道910如何与绑带缆绳931对接。如该示例所示,绑带931连续延伸穿过绑带通道910并进入线轴930的绑带凹槽932。横截面图还示出了绑带凹部935和线轴中间部分,当绑带931被线轴930的旋转卷起时,绑带931将在这些地方堆积。线轴中间部分937是设置在线轴930的上表面下方的圆形直径减小部分。绑带凹部935由线轴930的上部部分形成,该上部部分径向延伸以基本填充线轴凹部915、线轴凹部915的侧面和底面以及
线轴中间部分937。在一些示例中,线轴930的上部部分可以延伸超过线轴凹部915。在其他示例中,线轴930完全装配在线轴凹部915内,上部径向部分延伸到线轴凹部915的侧壁,但是允许线轴930随着线轴凹部915自由旋转。当绑带931穿过系带引擎900时,绑带931被绑带凹槽932捕获,从而当线轴930转动时,绑带931在绑带凹部935内旋转到线轴930的主体上。
124.如系带引擎900的横截面所示,线轴930包括线轴的轴933,线轴的轴933在延伸穿过o形环938之后与蜗轮950联接。在这个例子中,线轴的轴933通过带键连接销934联接到蜗轮。在一些示例中,带键连接销934仅从线轴的轴933沿一个轴向方向延伸,并且被蜗轮上的键接触,使得当蜗轮950的方向反转时,在带键连接销934被接触之前,允许蜗轮950几乎完全旋转。还可以实施离合器系统来将卷轴930联接到蜗轮950。在这样的例子中,离合器机构可以被停用,以允许线轴930在解开(松开)时自由运行。在带键连接销934仅从线轴的轴933沿一个轴向延伸的例子中,线轴被允许在放松(解开)过程的初始启动时自由移动,同时蜗轮950被向后驱动。允许线轴930在解开过程的初始部分自由移动有助于防止绑带931中的缠结,因为它为自适应支撑服装提供了响应的时间,这又将在由蜗轮950驱动之前在松开方向上张紧绑带931。
125.图9d是根据示例实施例的系带引擎900的另一横截面图。与图2f相比,图2g示出了系带引擎900的更内侧的横截面,其示出了诸如电路板160、无线充电互连165和无线充电线圈966的附加部件。图2g也用于描绘围绕线轴930和绑带931界面的附加细节。
126.图9e是根据示例实施例的系带引擎900的分解图。系带引擎900的分解图提供了所有不同部件如何装配在一起的图示。图9e示出了上下颠倒的系带引擎900,底部部分904在页面的顶部,顶部部分902在底部附近。在该示例中,无线充电线圈966被示出为粘附到底部部分904的外侧(底部)。分解图还提供了蜗杆传动940如何与衬套941、驱动轴943、齿轮箱944和齿轮马达945组装在一起的良好说明。该图示不包括容纳在蜗杆传动940的第一端部上的蜗杆传动键942内的传动轴销。如上所述,蜗杆传动940在驱动轴943上滑动,以接合蜗杆传动键942中的驱动轴销,该驱动轴销基本上是在蜗杆传动940的第一端部中横向于驱动轴943延伸的狭槽。
127.图9f是示出根据一些示例性实施例的用于将绑带固定在系带引擎的线轴内的机构的图。在该示例中,系带引擎900的线轴930在系带凹槽932内接收绑带缆绳931。图9f包括具有套圈的绑带缆绳和具有绑带凹槽的线轴,该绑带凹槽包括容纳套圈的凹部。在该示例中,套圈卡扣(例如干涉配合)到凹部中,以帮助将绑带缆绳保持在线轴内。其他示例线轴,例如线轴930,不包括凹部,并且自动自施用服装的其他部件用于将绑带缆绳保持在线轴的绑带凹槽中。这些示例进一步强调了自适应调节引擎的需要或至少有用性,该自适应调节引擎可以容易地从自适应服装上移除以清洁服装。
128.图10是示出根据一些示例性实施例的用于自适应支撑服装的机动系带系统的部件的框图。系统1000说明了机动系带系统的基本部件,例如包括接口按钮、(多个)脚存在传感器、带有处理器电路的印刷电路板组件(pca)、电池、充电线圈、编码器、马达、传动装置和线轴。在这个例子中,接口按钮和(多个)传感器(例如上面讨论的那些)与电路板(pca)通信,电路板也与电池和充电线圈通信。编码器和马达连接到电路板且连接到彼此。传动装置将马达联接联接到线轴以形成驱动机构。在自适应服装应用中,传感器输入被用来从监测自适应服装的解剖参数(例如,运动、位移、速度、加速度等)或参数的传感器(而不是像当机
动系带系统被集成到鞋类组件中时那样监测脚的存在)接收传感器输入。
129.在一示例中,处理器电路控制驱动机构的一个或多个方面。例如,处理器电路可以被配置为从按钮和/或从传感器(示出为脚存在传感器)和/或从电池和/或从驱动机构和/或从编码器接收信息,并且还可以被配置为向驱动机构发出命令,例如以收紧或松开自适应支撑负责,或者获得或记录传感器信息,以及其他功能。
130.自适应紧身衣
131.图11a-11e示出了根据一些示例的各种自适应紧身衣构造,包括手动或自动自适应调节。在一个例子中,自适应紧身衣1100a是由具有不同特性的各种织物构成的压缩型运动紧身衣。主体织物(白色/无模式部分)是织造、非织造或针纺织品,具有一些弹性特性,至少足以舒适地形成穿着者的轮廓。超拉伸织物(深灰色/模式丰富的部分)具有很高的弹性,提供了紧身衣所提供的大部分内在压缩。在一些示例中,自适应紧身衣1100a还包括网状区域以增强服装的透气性。
132.自适应紧身衣1100a还包括绑带1110和管1120形式的自适应支撑结构。在该示例中,绑带1110在沿着下部部分(膝盖的远端)的内(内侧)面对部分上和沿着上部部分(膝盖的近端)的外(外侧)面对部分上以分开的螺旋模式布线到沿着腰围的后部部分的调节机构1130。已经发现,在体育活动期间,当接合时,分开的螺旋系带模式提供了增加的弹性。可以实施其他系带模式来提供额外的压缩或其他类型的自适应支撑。在某些示例中,调节机构1130可以用如上所述的自适应引擎代替,用于支撑结构(例如,穿过引导管1120线的绑带1110)的自动控制。
133.图11b-11d示出了结合不同织物布局以及压条(例如,超拉伸织物(高弹性织物)的水平条带)的自适应紧身衣的替代示例。例如,图11c所示的自适应紧身衣1100c包括集成到紧身衣中的网状压缩条带,以增强大腿和小腿区域的压缩。如图11d所示,自适应紧身衣1100d也包括压缩条带,但是以不同的模式提供较低水平的压缩。在这些示例中,压缩条带至少在一些位置与引导管1120对齐,这将来自施加到绑带1110的拉力的力分布在衣服的更宽区域。
134.图11e示出了使用中的示例自适应紧身衣。在诸如跑步的活动期间,当穿着者的膝盖弯曲时,绑带1110脱离,但是当腿伸直时,绑带1110完全接合,以在对应脚的脚撞击期间,为腿的肌肉群提供额外的支撑,然后在腿的向上弯曲期间脱离,以提供运动自由度。因此,提供给穿着者的支撑随着跑步步幅而波动,从而当需要时,其启动以在跑步中的时刻期间提供对腿的增加的支撑,而当跑步周期期间需要较少的支撑时,其允许运动自由。在一些示例中,自适应引擎可以被接合以增加支撑波动,从而在跑步步幅的高冲击部分期间进一步增加支撑。支撑结构的变化也可以促进更高的能量返回,以增强穿着者的表现。
135.通过上述动态支撑获得的好处是在脚撞击期间提供额外的支撑,以增加对腿质量的支撑,例如大腿或小腿。然后,在脚撞击之后,在腿向上摆动的过程中,支撑脱离,以在腿向后摆动时提供运动自由度。
136.压缩袖套
137.袖套可以在体育活动中用作支撑,并有助于体育活动后的恢复。如这里所讨论的,袖套可以包括腿袖套、臂袖套以及其他服装的管状部分,例如衬衫、裤子、紧身衣、打底裤等等。图12a是描绘根据一些示例实施例的自适应压缩袖套的线图。在该示例中,自适应压缩
袖套1200a包括在调节区(例如,绑带引导件之间的空间)任一侧的一系列绑带引导件1210之间以交叉模式延伸的绑带1205。压缩袖套1200a还包括拉链1224和拉链拉头1222,以通过允许容易地缠绕目标身体,例如上部或下部腿区域,来帮助穿上压缩袖套。拉链1224将压缩袖套1200a分成第一半部1220a和第二半部1220b,它们主要由弹性或非弹性网状材料构成。在该示例中,第一半部1220a和第二半部1220b也通过底层1214连接,底层1214是跨两个半部并位于调节区下方的织物层。
138.这里所示的示例性自适应压缩袖套1200a用绑带1205手动调节。然而,自适应压缩袖套1200a可以具有集成的自适应调节引擎,以提供自动或半自动调节。如图12b-12e所示,自动自适应压缩袖套1200b可以被编程为通过加速度或本文公开的由imu提供的其他信息来检测穿着者身体活动的增加,并通过基于检测到的活动水平自动增加压缩来响应。
139.替代地,如下所述,自适应压缩袖套1200b可以被构造成通过脉动压缩水平或在袖套的整个长度上逐渐改变压缩水平和/或压缩位置来帮助恢复。在一个示例中,压缩袖套1200b可以脉动压缩和/或沿着袖套的纵向长度向上和/或向下迁移压缩位置,以增强循环并缩短恢复时间。自适应压缩袖套1200b由在智能手机、智能手表或可嵌入袖套或自适应引擎中的分立独立计算织造上运行的应用程序控制。
140.图12b-12e是根据一些示例性实施例的说明自适应压缩/恢复袖套1200b的线图,该袖套包括自适应引擎1230以进行自动调节。在该示例中,自适应压缩套管1200b包括诸如以下部件:绑带缆绳1205、绑带缆绳1206、气囊1208、绑带引导件1210、绑带返回引导件1212、绑带引导件覆盖件1215、纵向加强件1216、网状侧板1220a/1220b(也称为第一半部1220a和第二半部1220b,并统称为网状侧板1220)和自适应引擎1230。自适应袖套1200b还包括扩口远端1226,其适于接收身体部分,例如穿着者的脚踝。在某些示例中,自适应袖套1200b包括沿着背面(例如,腿的背面)的全长拉链,以便进入袖套和从其出来。
141.图12b示出了根据一些实施例的下部腿自适应袖套示例。自适应袖套1200b通过两区交叉系带模式将压缩力从自适应引擎1230沿袖套分配,所述两区交叉系带模式包括绑带缆绳1205和绑带缆绳1206,每个延伸穿过一系列绑带引导件1210。由绑带缆绳1206形成的下(远端)系带模式包括沿着系带区的外侧延伸的返回环,其通过返回引导件1212回到自适应袖套1200b的顶部(近端)。返回环有助于将拉力更均匀地分布在整个袖套上。绑带缆绳1205和绑带缆绳1206都被捕获在绑带止动件1218中,该绑带止动件1218允许额外的手动类型调节。例如,绑带缆绳1205和绑带缆绳1206之间的拉力水平可以使用绑带制动件1218(也称为绑带锚1218)来调节。改变绑带缆绳1205和绑带缆绳1206之间的相对拉力允许上系带区(例如,由绑带缆绳1205控制的区)与下系带区相比具有不同的压缩特性。相对术语“上”、“向上”或“顶部”通常用于指自适应袖套1200b的更近端,而“下”、“向下”或“底部”通常用于指自适应袖套1200b的更远端。图12b包括对近端和远端的参考,以帮助定向。
142.在该示例中,绑带缆绳1205和绑带缆绳1206都被馈送到自适应引擎1230中,自适应引擎1230设置在自适应袖套1200b的中间。在其他示例中,多个自适应引擎可用于根据需要控制单独的系带区,以在整个袖套上获得期望的压缩。在该示例中,绑带缆绳1205穿过自适应引擎1230,如上所述接合自适应引擎内的绑带线轴。从自适应引擎1230开始,绑带缆绳1205沿着袖套交叉向上到达近端,在该处它延伸穿过绑带锚1218。绑带缆绳1206还与绑带缆绳1205并行地环穿过接合绑带线轴的自适应引擎1230。从自适应引擎1230,绑带缆绳
1206沿着自适应袖套1200b交叉向下到达远端,在远端,绑带缆绳1206的每一端部围绕系带的周边(例如,调节区)延伸,经由返回引导件1212返回到近端。在该示例中,调节区由纵向加强件1216的边界限定。在其他示例中,调节区可以由其他结构限定,例如绑带引导覆盖件1215的边界。在该示例中,返回引导件1212由织物环或隧道形成,如上所述。在其他示例中,返回引导件1212可以是塑料绑带引导件或本领域已知的类似绑带布线结构
143.在该示例中,绑带引导件覆盖件2015是从两个纵向加强件2016向内朝向喉部延伸的纵向加强织物带,喉部是延伸自适应袖套1200b的大部分纵向长度的一系列绑带引导件之间的敞开空间。纵向加强件2016有助于袖套1200b保持形状,并有助于将绑带缆绳负载更均匀地分配到网状侧板1220。喉部(未具体标记)是绑带引导覆盖件2015之间的区域,其包含(或暴露)气囊1208的至少一部分。在该示例中,气囊1208还用于分配绑带缆绳力并保护穿着者的胫骨。在该示例中,气囊1208包含固定量的空气,其被预先填充,或者作为穿上过程的一部分被用户泵吸。设计用于上部腿上的袖套可以不包括气囊1208,因为没有坚硬的身体来保护免受由袖套的系带(例如绑带缆绳1205和绑带缆绳1206)产生的点压力。在另一个例子中,气囊1208被刚性或半刚性塑料护罩代替,该护罩用于分配绑带力。
144.图12c是自适应袖套的侧视线条画,其更好地示出了绑带返回引导件1212的一部分和绑带缆绳1206的返回路径。该侧视图还描绘了绑带返回引导件1212如何邻近纵向加强件1216的侧向边缘定位。在该示例中,纵向加强件2016是塑料涂覆的织物材料,在其他示例中,纵向加强件2016是嵌入织物层之间的刚性或半刚性结构(参见下面讨论的图12e)。
145.图12d示出了集成到自适应支撑袖套1200b中的示例自适应引擎1230的各方面。在这些示例中,自适应引擎1230包括诸如外壳1232、绑带线轴盖1234、盖闩锁1235、盖铰链1236和盖绑带引导件1238的部件。如上所述,自适应引擎1230类似于上面参照图9a-9e讨论的自适应引擎,下面讨论对该示例自适应压缩袖套进行的一些改适。
146.外壳1232被设计成容纳自适应引擎,例如上面讨论的那个。外壳1232包括凹部(或切口),以在外壳1232的任一侧向侧接收盖铰链1236。绑带线轴盖1234还包括盖闩锁1235,其接合外壳1232上的互补特征。在该示例中,盖闩锁1235包括斜面突起,该斜面突起卡扣到外壳1232的竖直壁中的凹部中。绑带线轴盖1234将绑带缆绳引导到自适应引擎1230内的绑带线轴中,以允许绑带缆绳(例如,绑带缆绳1205和绑带缆绳1206)的有效长度的自动变化。绑带线轴盖1234还包括位于每个侧向边缘上的绑带引导件1238,其将绑带绳引导到位以接合绑带线轴。
147.图12e是示出根据一些示例性实施例的自适应压缩袖套的横截面视图的线图。在该示例中,自适应袖套1200b包括气囊1208、绑带引导覆盖件1215、纵向加强件1216、刚性或半刚性棒1217、网状侧板1220、自适应引擎1230、凹口1232和压力传感器1240。纵向加强件1216的横截面示出了纵向加强件1216的示例,包括夹在自适应袖套1200b的层之间的刚性或半刚性棒1217。在一些示例中,棒1217可以通过形成在纵向加强件1216中的袋互换。
148.横截面图还示出了气囊1208的示例横截面形状,在该示例中,气囊1208包括凹口1232以容纳自适应引擎1230。凹口1232可以仅出现在自适应引擎1230的区域中。气囊1208还包括压力传感器1240,其提供气囊1208内空气压力的信息,该信息可用于确定自适应袖套1200b施加的压力。
149.图12f是示出根据一些示例性实施例的自适应袖套1200b的后视图的线图。在这个
例子中,自适应袖套1200b包括纵向拉链1224,其延伸自适应袖套的长度。拉链1224包括拉链拉头1222,并将网状侧板1220分成第一半部1220a和第二半部1220b。自适应袖套1200b还包括适于接收身体(例如穿着者的脚踝)的扩口远端1226。
150.图12g是根据一些示例性实施例的包括多个自适应压缩袖套和鞋类组件的全腿恢复系统1250的线图。在该示例中,恢复系统1250包括上部腿自适应压缩袖套1252、下部腿自适应压缩袖套1254和自适应鞋类组件1256。该系统通过在诸如智能手表30或智能手机35的计算装置上运行的应用程序来控制。
151.在该示例中,自适应压缩袖套和鞋类组件被构造成提供不同程度的压缩,以便于运动活动后的恢复。系统1250内的每个自适应这种的压缩和释放可以通过具有预编程顺序和/或用户定义例程的应用程序来控制。例如,系统1250可以指示鞋类组件1256压缩,随后是下部腿自适应压缩袖套1254的可调秒数,然后是上部腿自适应压缩袖套1252。该顺序可以根据需要被反转、重复和/或重新排列,以完成期望的恢复控制。
152.如上所述,控制回收系统1250中的每个自适应压缩装置的自适应引擎可以通过无线通信与控制器通信。控制器(例如,在这些示例中的智能手表30或智能手机35)可以控制压缩和释放的顺序,以对应于预定义的协议或用户生成的顺序。
153.图13a是示出根据一些示例实施例的用于操作自适应压缩服装的技术的流程图。在该示例中,技术1300可以包括诸如以下操作:在1305启动控制电路,在1320接收顺序选择,在1325发送命令,以及在1330操作自适应引擎。可选地,技术1300还可以包括诸如以下操作:在1310显示压缩顺序选项,以及在1315修改压缩顺序。此外,在技术1300中,操作自适应引擎可以可选地包括在1332处接合系带系统和在1334处操纵绑带线轴。
154.在该示例中,技术1300开始于1305,启动控制电路,例如控制电路50。控制电路是在诸如可穿着计算装置的计算装置上运行的电路或应用的专用集合。控制电路操作自适应压缩服装,例如上面讨论的自适应压缩袖套1200b。在1310,技术1300可选地继续,控制电路生成可供用户选择的可用压缩顺序的显示。技术1300还可选地包括在1315修改压缩顺序的操作。控制电路还可以生成允许用户修改或创建压缩顺序的用户界面。压缩顺序通常包括具有相关延迟的一系列压缩和释放命令。
155.在1320,技术1300继续,控制电路接收压缩顺序的选择。选定的压缩顺序将在自适应压缩服装上执行。在1325,技术1300继续,控制电路向自适应引擎发送命令以执行所选择的压缩顺序。技术1300在1330继续,其中自适应引擎运行以执行接收到的命令,以便执行选择的压缩顺序。操作自适应引擎可以包括在1332将系带系统接合在自适应压缩服装上,并且操纵自适应引擎内的绑带线轴以改变系带系统内的绑带缆绳的有效长度。改变一个或多个系带缆绳的有效长度,以接合或脱离压缩。
156.图13b是示出根据一些示例实施例的使用自适应压缩恢复系统的恢复技术的流程图。技术1350详细描述了操作包括多个自适应压缩服装的恢复系统的示例,如上面参考图12g所讨论的。在该示例中,技术1300b可以包括诸如以下操作:在1355启动控制电路,在1370接收和/或处理恢复顺序选择,在1375发送协调命令,在1380操作第一自适应服装,在1385操作第二自适应服装,以及在1390可选地操作自适应鞋类组件。可选地,技术1350还包括诸如以下操作:在1360显示恢复顺序选项,以及在1365修改或创建恢复顺序。
157.技术1350开始于1355,启动控制电路,例如启动智能手表30或智能手机35上的应
用操作,该应用操作将控制系统中的自适应压缩服装。在1360,技术1350可选地继续,控制电路显示恢复顺序选项供用户选择。技术1350可选地在1365继续,控制电路生成允许用户修改或创建恢复顺序的界面。在1370,技术1350继续,控制电路(例如,在智能手表30或智能手机35上运行的应用)接收和/或处理所选择的恢复顺序。处理所选择的恢复顺序包括生成一系列协调的命令,以在自适应恢复系统中对自适应压缩服装执行协调的压缩和释放操作。自适应压缩服装之间的协调包括操作的定时等。
158.在1375,技术1350继续,控制电路向自适应恢复系统中的每个自适应压缩服装发送协调命令。技术1350继续,在1380协调操作第一自适应服装,在1385协调操作第二自适应服装,在1390可选地协调操作自适应鞋类。在一个示例中,自适应压缩服装的协调操作可以包括诸如压缩自适应鞋组件1256的序列,随后x秒钟后压缩自适应压缩袖套1254,随后x秒钟后压缩自适应压缩袖套1252。示例性顺序可以继续,释放自适应压缩袖套1252,随后释放自适应压缩袖套1254,随后释放自适应鞋类组件1256。压缩的释放可以包括每次释放之间的短暂延迟,类似于压缩之间的延迟。顺序可以包括脉冲压缩和其他更复杂的相互作用。
159.图14是示出根据一些示例实施例的机器1300(例如,计算装置)的部件的框图,该机器1300能够从机器可读介质(例如,机器可读存储介质)读取指令并执行这里讨论的任何一种或多种方法(技术)。具体而言,图14以计算机系统的示例形式示出了机器1400的图示,其中可以执行用于使机器1400执行这里讨论的任何一种或多种方法的指令1416(例如,软件、程序、应用、小应用程序、app或其他可执行代码)。例如,指令可以使机器执行图1d、12g和13的流程图。附加地或替代地,指令实现系统1的方面,包括控制电路50以及自适应引擎15的方面。这些指令还实现属于智能手表30或智能手机35或在智能手表30或智能手机35上操作的功能。这些指令将通用的、未编程的机器转换成特定的机器,该特定的机器被编程为以所描述的方式执行所描述和示出的功能。在替代实施例中,机器1400作为独立装置操作,或者可以耦接(例如,联网)到其他机器。在网络化部署中,机器1400可以以服务器-客户端网络环境中的服务器机器或客户端机器的身份运行,或者作为对等(或分布式)网络环境中的对等机器运行。机器1400可以包括但不限于服务器计算机、客户端计算机、个人计算机(pc)、平板计算机、膝上型计算机、上网本、机顶盒(stb)、个人数字助理(pda)、娱乐媒体系统、蜂窝电话、智能手机、移动设备、可穿着装置(例如智能手表)、智能家居设备(例如智能电器)、其他智能设备、网络设备、网络路由器、网络交换机、网桥或能够顺序地或以其他方式执行指令1416的任何机器,指令1416明确要被机器1400采取的动作。此外,虽然仅示出了单个机器1400,但是术语“机器”也应当被理解为包括单独或联合执行指令1416以执行这里讨论的任何一种或多种方法的机器1400的集合。
160.机器1400可以包括处理器1410、存储器1430和输入/输出部件1450,它们可以被构造成例如经由总线1402彼此通信。在示例实施例中,处理器1410(例如,中央处理单元(cpu)、精简指令集计算(risc)处理器、复杂指令集计算(cisc)处理器、图形处理单元(gpu)、数字信号处理器(dsp)、专用集成电路(asic)、射频集成电路(rfic)、另一处理器或其任何合适的组合)可以包括例如可以执行指令1416的处理器1412和处理器1414。术语“处理器”旨在包括多芯处理器,该多芯处理器可以包括可以同时执行指令的两个或多个独立处理器(有时称为“芯”)。尽管图14示出了多个处理器,但是机器1400可以包括具有单芯的单个处理器、具有多芯的单个处理器(例如,多芯进程)、具有单芯的多个处理器、具有多芯
的多个处理器或其任意组合。
161.存储器/存储装置1430可以包括存储器1432,例如主存储器或其他存储装置,以及存储单元1436,处理器1410可以例如通过总线1402访问这两者。存储单元1436和存储器1432存储指令1416,指令1416包含这里描述的任何一种或多种方法或功能。在机器1400执行指令1416期间,指令1416也可以完全或部分地驻留在存储器1432内、存储单元1436内、至少一个处理器1410内(例如,在处理器的高速缓冲存储器内)或其任何合适的组合内。因此,存储器1432、存储单元1436和处理器1410的存储器是机器可读介质的示例。
162.如本文所用,“机器可读介质”是指能够临时或永久存储指令和数据的设备,包括但不限于随机存取存储器(ram)、只读存储器(rom)、缓冲存储器、闪存、光学介质、磁介质、高速缓冲存储器、其他类型的存储器(例如,可擦除可编程只读存储器(eeprom))和/或其任何合适的组合。术语“机器可读介质”应被理解为包括能够存储指令1416的单个介质或多个介质(例如,集中式或分布式数据库,或相关联的高速缓存和服务器)。术语“机器可读介质”还应被理解为包括能够存储由机器(例如,机器1400)执行的指令(例如,指令1416)的任何介质或多种介质的组合,使得当指令由机器1400的一个或多个处理器(例如,处理器1410)执行时,导致机器1400执行这里描述的任何一种或多种方法。因此,“机器可读介质”指的是单个存储装置或设备,以及包括多个存储装置或设备的“基于云”的存储系统或存储网络。术语“机器可读介质”不包括信号本身。
163.输入/输出部件1450可以包括各种各样的部件来接收输入、提供输出、产生输出、传输信息、交换信息、捕获测量值等等。包含在特定机器中的特定输入/输出部件1450将取决于机器的类型。例如,诸如移动电话的便携式机器将可能包括触摸输入设备或其他这样的输入机制,而无头服务器机器将可能不包括这样的触摸输入设备。应当理解,输入/输出部件1450可以包括图14中未示出的许多其他部件。输入/输出部件1450根据功能被分组仅仅是为了简化下面的讨论,并且分组决不是限制性的。在各种示例实施例中,输入/输出部件1450可以包括输出部件1452和输入部件1454。输出部件1452可以包括视觉部件(例如,诸如等离子体显示面板(pdp)、发光二极管(led)显示器、液晶显示器(lcd)、投影仪或阴极射线管(crt)的显示器)、声学部件(例如,扬声器)、触觉部件(例如,振动马达、电阻机构)、其他信号发生器等。输入部件1454可以包括字母数字输入部件(例如,键盘、被构造为接收字母数字输入的触摸屏、光电键盘或其他字母数字输入部件)、基于点的输入部件(例如,鼠标、触摸板、轨迹球、操纵杆、运动传感器或其他指示仪器)、触觉输入部件(例如,物理按钮、提供触摸或触摸手势的位置和/或力的触摸屏或其他触觉输入部件)、音频输入部件(例如,麦克风)等。
164.在进一步的示例实施例中,输入/输出部件1450可以包括生物测定部件1456、运动部件1458、环境部件件1460或广泛的其他部件中的位置部件1462。在某些示例中,输入/输出部件包括上面讨论的传感器25。在一个示例中,生物测定部件1456可以包括用于检测表情(例如,手表情、面部表情、声音表情、身体姿势或眼睛跟踪)、测量生物信号(例如,血压、心率、体温、排汗或脑电波)、识别人(例如,语音识别、视网膜识别、面部识别、指纹识别或基于脑电图的识别)等的部件。运动部件1458可以包括加速度传感器部件例如,加速度计)、重力传感器部件、旋转传感器部件(例如,陀螺仪)等。环境部件1460可包括,例如,照明传感器部件(例如,光度计)、温度传感器部件(例如,检测环境温度的一个或多个温度计)、湿度传
感器部件、压力传感器部件(例如,气压计)、声学传感器部件(例如,检测背景噪声的一个或多个麦克风)、接近传感器部件(例如,检测附近物体的红外传感器)、气体传感器(例如,为了安全检测有害气体的浓度或测量大气中的污染物的气体检测传感器),或可提供指示、测量或对应于周围物理环境的信号的其他部件。位置部件1462可以包括位置传感器部件(例如,全球定位系统(gps)接收器部件)、高度传感器部件(例如,检测气压的高度计或气压计,从该气压可以导出高度)、取向传感器部件(例如,磁力计)等。这里讨论的所有不同的输入/输出部件1450可以集成到上面讨论的系统1中,并且来自这些不同的输入/输出部件的数据输出可以用在图1d、12g和13中讨论的自适应支撑系统技术中。
165.可以使用多种技术来实现通信。输入/输出部件1450可以包括通信部件1464,通信部件1464可操作来分别经由耦接件1482和耦接件1472将机器1400耦接到网络1480或设备1470。例如,通信部件1464可以包括网络接口部件或其他合适的设备来与网络1480接口。在进一步的示例中,通信部件1464可以包括有线通信部件、无线通信部件、蜂窝通信部件、近场通信(nfc)部件、蓝牙部件(例如,蓝牙低能量)、wi-fi部件和其他通信部件,以通过其他方式提供通信。设备1470可以是另一机器或多种外围设备中的任何一种(例如,经由通用串行总线(usb)耦接的外围设备)。
166.此外,通信部件1464可以检测标识符或者包括可操作来检测标识符的部件。例如,通信部件1464可以包括射频识别(rfid)标签读取器部件、nfc智能标签检测部件、光学读取器部件(例如,用于检测一维条形码如通用产品代码(upc)条形码、多维条形码如快速响应(qr)码、阿兹特克码、数据矩阵、数据字形、maxicode、pdf417、ultra code、ucc rss-2d条形码和其他光学代码的光学传感器)或声学检测部件(例如,用于识别标记音频信号的麦克风)。此外,可以经由通信部件1464导出各种信息,例如经由互联网协议地理位置的位置、经由无线信号三角测量的位置、经由检测可能指示特定位置的nfc信标信号的位置等。
167.传送介质
168.在各种示例实施例中,网络1480的一个或多个部分可以是自组织网络、内联网、外联网、虚拟专用网络(vpn)、局域网(lan)、无线局域网(wlan)、广域网(wan)、无线广域网(wwan)、城域网(man)、互联网、互联网的一部分、公共交换电话网(pstn)的一部分、普通老式电话服务(pots)网络、蜂窝电话网络、无线网络、wi-fi网络、另一种类型的网络或其两个或多个这种网络的组合。例如,网络1480或网络1480的一部分可以包括无线或蜂窝网络,耦接件1482可以是码分多址(cdma)连接、全球移动通信系统(gsm)连接或其他类型的蜂窝或无线耦接。在该示例中,耦接件1482可以实现多种类型的数据传输技术中的任何一种,例如单载波无线电传输技术(1xrtt)、演进-数据优化(evdo)技术、通用分组无线电服务(gprs)技术、增强型数据速率gsm演进(edge)技术、包括3g在内的第三代合作伙伴计划(3gpp)、第四代无线(4g)网络、通用移动电信系统(umts)、高速分组接入(hspa)、微波接入全球互操作性(wimax)、长期演进(lte)标准和由各种标准制定组织、其他远程协议或其他数据传输技术定义的其他。
169.指令1416可以使用传输介质经由网络接口设备(例如,包括在通信部件1464中的网络接口部件)并利用多种众所周知的传输协议(例如,超文本传输协议(http))中的任何一种在网络1480上发送或接收。类似地,指令1416可以使用传输介质经由耦接件1472(例如,对等耦接件)传输或接收到设备1470。术语“传输介质”应被理解为包括能够存储、编码
或承载由机器1400执行的指令1416的任何无形介质,并且包括数字或模拟通信信号或其他有助于这种软件的通信的无形介质。
170.补充说明
171.在整个说明书中,多个实例可以实现被描述为单个实例的部件、操作或结构。尽管将一种或多种方法的单独操作示出并描述为分开的操作,但是可以同时执行一个或多个单独操作,并且不需要按照所示顺序执行操作。在示例构造中表示为单独部件的结构和功能可以实施为组合的结构或部件。类似地,呈现为单个部件的结构和功能可以实现为单独的部件。这些和其他变型、修改、添加和改进落入本文主题的范围内。
172.尽管已经参考特定示例实施例描述了本发明主题的概述,但是可以在不脱离本公开的实施例的较宽范围的情况下对这些实施例进行各种修改和改变。仅出于方便起见,本文中可以单独地或共同地用术语“发明”来指代发明主题的此类实施例,并且如果其实有多个以上的公开或发明构思,则不希望将本技术的范围自动限制为任何单个公开或发明构思。
173.此处足够详细地描述了本文所示的实施例,以使本领域技术人员能够实践所公开的教导。可以使用其他实施例并从中得出其他实施例,使得可以在不脱离本公开的范围的情况下进行结构和逻辑上的替换和改变。因此,本公开不应被理解为限制性的,并且各种实施例的范围包括所公开的主题有权享有的等同物的全部范围。
174.如本文所使用的,术语“或”可以以包括性或排他性的意义来解释。此外,可以为本文中描述为单个实例的资源,操作或结构提供多个实例。另外,各种资源、操作、模块、引擎和数据存储之间的边界在某种程度上是任意的,并且在特定说明性构造的上下文中示出了特定操作。可以设想功能的其他分配,并且其可以落入本公开的各种实施例的范围内。通常,在示例构造中表示为单独资源的结构和功能可以实现为组合结构或资源。类似地,呈现为单个资源的结构和功能可以实现为单独的资源。这些和其他变型、修改、添加和改进落入如所附权利要求所表示的本公开的实施例的范围内。因此,说明书和附图应被认为是说明性的而不是限制性的。
175.这些非限制性示例中的每一个可以独立存在,或者可以与一个或多个其他示例以各种排列组合或组合。
176.示例1是一种自适应支撑服装,被构造为支撑身体部分,所述自适应支撑服装包括:集成到所述自适应支撑服装中并被构造为调节所述自适应支撑服装的一部分的自适应支撑结构;以及自适应引擎,联接到所述自适应支撑结构,以启动所述自适应支撑服装的所述部分的调节。
177.在示例2中,根据示例1的主题包括,其中所述自适应支撑结构包括系带系统。
178.在示例3中,根据示例1和2的主题包括,其中所述系带系统包括穿过多个绑带引导件的绑带缆绳,以调节所述自适应支撑服装的所述部分。
179.在示例4中,根据示例1-3的主题包括,其中所述自适应引擎操作以调节所述绑带缆绳的有效长度。
180.在示例5中,根据示例1-4的主题包括,其中所述自适应引擎包括马达和控制系统,以自动或半自动地调节所述自适应支撑结构。
181.在示例6中,示例1-5的主题包括,相对于所述身体部分定位的传感器,以监测所述
身体部分的参数。
182.在示例7中,示例6的主题包括,其中所述传感器监测指示所述身体部分的以下参数中的至少一个参数:位移;加速度;速度;和运动。
183.在示例8中,示例1-7的主题包括,其中所述自适应引擎包括马达和控制系统,所述控制系统被构造为响应于从所述传感器接收到的信息来控制所述马达。
184.在示例9中,示例1-8的主题包括,其中所述自适应支撑服装是包括肩带、胸部接触表面和下条带的胸罩。
185.在示例10中,示例1-9的主题包括,其中所述自适应支撑结构包括联接到所述肩带、所述胸部接触表面和所述下条带中的至少一者的系带。
186.在示例11中,示例1-10的主题包括,其中所述自适应支撑结构包括联接到右翼部分和左翼部分以提供鸡心位压缩的后系带系统。
187.在示例12中,示例1-11的主题包括,其中所述后系带系统包括在胸罩的所述右翼部分和所述左翼部分之间延伸的交叉系带模式。
188.在示例13中,示例1-12的主题包括,其中所述后系带系统包括联接到所述肩带的后基部的系带。
189.在示例14中,示例1-13的主题包括,其中所述后系带系统包括在所述肩带上延伸并联接到所述胸部接触表面的上部部分的系带。
190.在示例15中,示例1-14的主题包括,其中所述自适应支撑结构包括联接到所述下条带的系带。
191.在示例16中,示例1-15的主题包括,其中所述自适应支撑结构包括在所述胸部接触表面之间延伸的前系带系统。
192.在示例17中,示例1-16的主题包括,其中所述前系带系统包括沿着所述胸部接触表面中的每个胸部接触表面的中心边缘在多个绑带引导件之间形成交叉系带模式的系带。
193.在示例18中,示例1-17的主题包括,其中所述前系带系统包括穿过设置在所述肩带中的每个肩带的一部分上的绑带引导件延伸的系带。
194.在示例19中,示例1-18的主题包括,其中所述自适应支撑结构包括系带系统,所述系带系统被布线穿过邻近所述自适应支撑服装的所述部分定位的多个绑带引导件。
195.在示例20中,示例1-19的主题包括,其中所述多个绑带引导件的至少一部分包括滑轮以引导系带系统的一部分。
196.示例21是一种自适应支撑服装,被构造为支撑身体部分,所述自适应支撑服装包括:集成到所述自适应支撑服装中并被构造为调节所述自适应支撑服装的一部分的自适应支撑结构;以及自适应引擎,包括马达和控制系统,所述自适应引擎联接到所述自适应支撑结构,以自动调节所述自适应支撑服装的所述部分。
197.示例22是一种自适应支撑系统,包括:自适应支撑服装,被构造成支撑身体部分;自适应支撑结构,集成到所述自适应支撑服装中,所述自适应支撑结构被构造为相对于所述自适应支撑服装的第二部分调节所述自适应支撑服装的第一部分;传感器,相对于所述身体部分定位,以监测与所述身体部分相关联的参数;以及自适应引擎,其联接到所述自适应支撑结构,以至少部分基于从所述传感器接收的数据来调节所述自适应支撑服装的所述第一部分。
198.示例23是一种自适应支撑服装系统,包括:活动传感器,监测用户活动;自适应支撑服装,包括集成到所述自适应支撑服装中的自适应支撑系统和联接到所述自适应支撑系统的自适应引擎,以通过操纵所述自适应支撑系统来自动调节所述自适应支撑服装的一部分;以及控制电路,被构造为响应于从所述活动传感器接收的输入向所述自适应引擎发送命令。
199.在示例24中,示例23的主题包括,其中所述控制电路被构造为基于从所述活动传感器接收的数据选择预定义的活动分类。
200.在示例25中,示例23和24的主题包括,其中所述预定义的活动分类包括高冲击和舒适性。
201.在示例26中,示例23-25的主题包括,其中所述控制电路还被构造为基于所选择的预定义活动分类来确定支撑水平。
202.在示例27中,示例23-26的主题包括,其中所述自适应引擎基于从所述控制电路接收的对应于所确定的支撑水平的控制命令来调节所述自适应支撑系统。
203.在示例28中,示例23-27的主题包括,其中所述活动传感器嵌入在鞋类组件内。
204.在示例29中,示例23-28的主题包括,其中所述活动传感器被构造成检测脚撞击活动。
205.在示例30中,示例23-29的主题包括,其中所述控制电路被构造为从所述活动传感器接收脚撞击活动数据,并基于所述脚撞击活动数据计算预定义的活动分类。
206.在示例31中,示例23-30的主题包括,其中所述活动传感器是惯性测量单元(imu)。
207.在示例32中,示例23-31的主题包括,其中所述活动传感器嵌入在所述自适应支撑服装内。
208.在示例33中,示例23-32的主题包括,其中所述活动传感器被构造为检测软组织运动。
209.在示例34中,示例23-33的主题包括,其中所述自适应支撑服装是胸罩,并且所述活动传感器设置在胸部接触表面的一部分内。
210.在示例34中,示例23-33的主题包括,其中所述自适应支撑服装是胸罩,并且所述活动传感器设置在肩带内。
211.在示例36中,示例23-35的主题包括,其中所述活动传感器包括以下中的至少一个:加速度计;陀螺仪;磁力计;全球定位传感器(gps);心率监测器;温度传感器;和应变仪。
212.在示例37中,示例23-36的主题包括,其中所述控制电路设置在包括显示器和通信电路的计算设备内。
213.在示例38中,示例23-37的主题包括,其中所述通信电路被构造为向所述自适应引擎无线发送命令。
214.在示例39中,示例23-38的主题包括,其中所述计算设备是智能手表、智能手机或心率监视器中的一者。
215.在示例40中,示例23-39的主题包括,其中所述自适应支撑系统包括连接所述自适应支撑服装的单独部分的系带,其中所述系带是可调节的,以改变所述自适应支撑服装的单独部分的相对位置,从而产生不同的支撑特性。
216.在示例41中,示例23-40的主题包括,其中所述自适应支撑系统包括多个绑带引导
件,以将所述系带引导穿过所述自适应支撑服装的所述单独部分。
217.在示例42中,示例23-41的主题包括,其中所述系带的至少一个段联接到所述自适应引擎的绑带线轴部件,以使所述自适应引擎能够改变所述系带的有效长度。
218.在示例43中,示例23-42的主题包括,其中所述控制电路被构造为分析从所述活动传感器接收的数据,以确定是否调节集成到所述自适应支撑服装中的所述自适应支撑系统。
219.在示例44中,示例23-43的主题包括,其中在确定需要对所述自适应支撑系统进行调节时,向所述自适应引擎发送调节命令以执行调节。
220.示例45是一种自适应支撑服装系统,包括:活动传感器,监测指示用户活动水平的参数;自适应支撑服装,包括集成到所述自适应支撑服装中的自适应支撑系统和联接到所述自适应支撑系统的自适应引擎,以通过操纵所述自适应支撑系统来相对于所述自适应支撑服装的第二部分调节所述自适应支撑服装的第一部分;以及控制电路,被构造为响应于从所述活动传感器接收的输入向所述自适应引擎发送命令。
221.示例46是一种自适应支撑服装系统,包括:自适应支撑服装,包括集成到所述自适应支撑服装中的自适应支撑系统和联接到所述自适应支撑系统的自适应引擎,以通过操纵所述自适应支撑系统来相对于所述自适应支撑服装的第二部分调节所述自适应支撑服装的第一部分;以及控制电路,被构造为响应于接收到的指示用户活动水平的输入来控制所述自适应引擎。
222.在示例47中,示例46的主题包括:可穿着计算设备,其包括被构造为接受指示用户活动水平的输入的用户界面;并且其中所述控制电路被构造成从所述可穿着计算设备接收活动水平。
223.在示例48中,示例46-47的主题包括:检测用户活动的活动传感器;并且其中所述控制电路被构造成处理从所述活动传感器接收的输入以控制所述自适应引擎。
224.在示例49中,示例46-48的主题包括,其中所述控制电路基于从所述活动传感器接收的输入向所述自适应引擎发送预定义的支撑水平命令。
225.在示例50中,示例46-49的主题包括基于从所述活动传感器接收的活动水平数据选择预定义的活动分类。
226.在示例51中,示例46-50的主题包括,其中预定义的活动分类选自一组活动水平,包括:低费力、中等费力、提高的费力和高度费力。
227.在示例52中,示例46-51的主题包括基于所选择的预定义活动分类来确定支撑水平。
228.在示例53中,示例46-52的主题包括,其中调节所述自适应支撑服装的所述部分基于从所述控制电路接收的对应于所确定的支撑水平的控制命令。
229.在示例54中,示例46-53的主题包括,其中所述控制电路通过与容纳所述活动传感器的鞋类组件的无线通信链路接收所述活动水平数据。
230.在示例55中,示例46-54的主题包括从来自所述活动传感器的所述活动水平数据中提取脚撞击活动。
231.在示例56中,示例46-55的主题包括基于从所述活动水平数据中提取的脚撞击活动来计算预定义的活动分类。
232.在示例57中,示例46-56的主题包括基于来自活动传感器的活动水平数据计算活动水平,该活动水平数据包括加速度数据、角速度数据和取向数据中的至少一种。
233.在示例58中,示例46-57的主题包括基于计算的活动水平选择预定义的活动分类。
234.在示例59中,示例46-57的主题包括,其中所述自动调节自适应支撑服装的所述部分至少部分基于计算的活动水平。
235.在示例60中,示例46-59的主题包括,其中所述控制电路通过与包含活动传感器的自适应支撑服装的通信链路接收活动水平数据。
236.在示例61中,示例46-60的主题包括,其中接收活动水平数据包括从嵌入自适应支撑服装中的活动传感器接收软组织运动数据。
237.在示例62中,示例46-61的主题包括,其中控制电路通过与心率检测器的通信链路接收活动水平数据,并且其中接收活动水平数据包括接收心率数据。
238.在示例63中,示例46-62的主题包括,其中控制电路通过与全球定位传感器(gps)的通信链路接收活动水平数据,并且其中接收活动水平数据包括接收位置数据、速度数据和加速度数据中的至少一种。
239.在示例64中,示例46-63的主题包括,其中自动调节自适应支撑服装的部分包括操纵连接自适应支撑服装的分离部分的系带系统,其中系带系统是可调节的,以改变自适应支撑服装的分离部分的相对位置,从而产生不同的支撑特性。
240.在示例65中,示例46-64的主题包括,其中操纵系带系统包括操作自适应引擎以改变系带系统的至少一部分的有效长度。
241.在示例66中,示例46-65的主题包括,其中操作自适应引擎以改变有效长度包括旋转联接到系带系统的所述部分的绑带线轴。
242.示例67是一种动态适配支撑服装系统的方法,所述支撑服装系统包括自适应支撑服装和控制电路,所述方法包括:在控制电路处接收活动水平指示符;向集成到自适应支撑服装中的自适应引擎发送控制命令;以及响应于控制命令,基于自适应引擎操纵自适应支撑服装内的自适应支撑结构,自动调节自适应支撑服装的一部分。
243.在示例68中,示例67的主题包括:用活动传感器监测用户活动水平;并且其中接收活动水平指示符包括接收由活动传感器生成的活动水平数据。
244.在示例69中,示例67-68的主题包括,其中接收活动水平指示符包括从控制电路接收支撑水平选择。
245.在示例70中,示例67-69的主题包括,其中支撑水平选择从由控制电路从适配为从穿着者接收输入的用户界面接收的输入中获得。
246.在示例71中,示例67-70的主题包括,其中接收活动水平指示符包括:从设置在鞋类组件内的活动传感器接收活动数据;以及在控制电路上处理活动数据以确定活动水平指示符。
247.在示例72中,示例67-71的主题包括从来自活动传感器的活动水平数据中提取一个或多个步伐度量。
248.在示例73中,示例67-72的主题包括基于从活动水平数据提取的一个或多个步伐度量来计算活动水平指示符。
249.在示例74中,示例67-73的主题包括,其中发送控制命令包括基于活动水平指示符
确定自适应支撑服装的支撑水平。
250.示例75是一种自适应支撑服装,包括:支撑结构,其被构造成围绕穿着者的身体部分,并在该身体部分上提供压缩;设置在支撑结构上的多个绑带引导件;绑带缆绳,延伸穿过绑带引导件,以在支撑结构的系带区域上并围绕支撑结构的该部分的周边的一部分形成系带模式;以及联接到支撑结构并与绑带缆绳接合的自适应引擎,其中自适应引擎被构造为相应地增加或减少绑带缆绳上的拉力以增加或减少支撑结构的压缩。
251.在示例76中,示例75的主题包括,其中系带模式包括围绕支撑结构的系带区域的周边完全布设绑带缆绳。
252.在示例77中,示例75-76的主题包括,其中绑带引导件包括沿周边定位的多个管状绑带引导件,并且其中绑带缆绳延伸穿过管状绑带引导件。
253.在示例78中,示例75-77的主题包括,其中自适应引擎位于支撑结构的系带区域内。
254.在示例79中,示例75-78的主题包括,其中自适应引擎位于支撑结构的系带区域的中心点上方。
255.在示例80中,示例75-79的主题包括,其中绑带缆绳从自适应引擎的相对侧延伸。
256.在示例81中,示例75-80的主题包括,其中绑带缆绳在自适应引擎上方和下方形成跨支撑结构的系带区域的交叉模式。
257.在示例82中,示例75-81的主题包括,其中绑带缆绳固定在周边的外部。
258.在示例83中,示例75-82的主题包括固定到支撑结构的锚,其中绑带缆绳固定到锚。
259.在示例84中,示例75-83的主题包括,其中锚被构造成围绕锚拉紧绑带。
260.在示例85中,示例75-84的主题包括,其中绑带缆绳包括第一绑带缆绳和单独的第二绑带缆绳。
261.在示例86中,示例75-85的主题包括,其中第一绑带缆绳形成从自适应引擎的近侧向近侧延伸的第一系带区,第二绑带缆绳形成从自适应引擎的远侧向远侧延伸的第二系带区。
262.在示例87中,示例75-86的主题包括,其中第二绑带缆绳从自适应支撑服装的远端沿着支撑结构的周边布线至近端。
263.在示例88中,示例75-86的主题包括,其中自适应引擎位于沿着支撑结构的近端-远端长度的中点。
264.示例89是一种自适应支撑服装,包括:支撑结构,被构造成包裹围绕穿着者的身体部分,以向该身体部分提供压缩;设置在支撑结构上的多个绑带引导件;绑带缆绳,延伸穿过绑带引导件,以在支撑结构的系带区域上形成系带模式;自适应引擎,联接到所述支撑结构并与所述绑带缆绳接合,其中所述自适应引擎被构造成相应地增加或减少所述绑带缆绳上的拉力以增加或减少所述支撑结构的压缩;以及位于系带区域和自适应支撑服装的面向穿着者的表面之间的气囊,该气囊被构造为沿着气囊分配来自绑带缆绳的力。
265.在示例90中,示例89的主题包括,其中气囊形成凹口,该凹口的尺寸被设置为至少部分地容纳自适应支撑引擎,并且其中自适应支撑引擎设置在凹口中。
266.在示例91中,示例89和90的主题包括,其中自适应支撑引擎被构造成在绑带缆绳
上施加拉力时被拉入凹口中。
267.在示例92中,示例89-91的主题包括,其中凹口位于沿着气囊的近端-远端长度的中心点。
268.在示例93中,示例89-92的主题包括,其中支撑结构包括在其间形成腔的第一层和第二层,其中气囊位于腔内。
269.在示例94中,示例89-93的主题包括沿着支撑结构的纵向轴线纵向延伸的加强元件。
270.在示例95中,示例89-94的主题包括,其中加强元件沿着系带区域的第一侧延伸。
271.在示例96中,示例89-95的主题包括,其中加强元件是第一加强元件,并且还包括沿着系带区域的第二侧定位的第二加强元件,该第二侧与系带区域的第一侧相对。
272.在示例97中,示例89-96的主题包括,其中加强元件位于第一和第二层之间。
273.在示例98中,示例89-97的主题包括,其中气囊基本上与系带区域共同延伸。
274.在示例99中,示例89-98的主题包括构造成检测气囊内压力的压力传感器,该压力传感器可操作地联接到自适应引擎,其中自适应引擎构造成部分基于压力传感器检测到的气囊内压力来增加或减少绑带上的拉力。
275.在示例100中,示例89-99的主题包括,其中压力传感器位于气囊内。
276.在示例101中,示例89-100的主题包括,其中自适应引擎设置在支撑结构的中心。
277.在示例102中,示例89-101的主题包括,其中系带模式沿着支撑结构的纵向轴线在自适应引擎的上方和下方延伸。
278.在示例103中,示例89-102的主题包括,其中绑带缆绳从自适应引擎的相对侧延伸。
279.在示例104中,示例89-103的主题包括,其中自适应引擎包括被构造为卷绕绑带缆绳的线轴,其中绑带缆绳被构造为在线轴的相对侧退出线轴。
280.在示例105中,示例89-104的主题包括,其中绑带缆绳在自适应引擎上方和下方形成跨支撑结构的系带区域的交叉模式。
281.在示例106中,示例89-105的主题包括,其中支撑结构包括第一半部和第二半部以及沿着支撑结构的纵向轴线延伸的拉链,拉链被构造为将第一半部连接到第二半部以形成管状支撑结构。
282.在示例107中,示例89-106的主题包括,其中支撑结构包括在系带区域的第一侧和拉链之间延伸的第一弹性部分和在系带区域的第二侧和拉链之间延伸的第二弹性部分。
283.在示例108中,示例89-107的主题包括,其中第一和第二弹性部分由网格形成。
284.在示例109中,示例89-108的主题包括,其中穿着者的身体部分是第一部分,其中支撑结构在系带区域下方形成张开部分,以接纳穿着者的第二身体部分。
285.在示例110中,示例89-109的主题包括,其中张开部分的尺寸适于容纳穿着者的脚踝。
286.在示例111中,示例89-110的主题包括,其中系带模式不延伸到张开部分中。
287.在示例112中,示例89-111的主题包括,其中张开部分在张紧绑带缆绳时不被压缩。
288.在示例113中,示例89-112的主题包括,其中系带模式是分离的螺旋模式。
289.在示例114中,示例89-113的主题包括,其中分离的螺旋模式沿着支撑结构的下部部分的内侧部分和支撑结构上部部分的外侧部分形成。
290.示例115是一种用于操作自适应压缩服装的方法,该方法包括:启动通信地耦接到自适应压缩服装上的自适应引擎的控制电路;在控制电路上接收压缩顺序的选择;从控制电路向自适应引擎发送一系列压缩和释放命令;以及响应于一系列压缩和释放命令操作自适应引擎以执行压缩顺序。
291.在示例116中,示例115的主题包括,其中操作自适应引擎包括使系带系统与自适应引擎接合,以响应于压缩命令张紧系带系统。
292.在示例117中,示例115-116的主题包括,其中张紧系带系统包括缩短系带系统内的绑带缆绳的有效长度,以产生自适应压缩服装的压缩。
293.在示例118中,示例115-117的主题包括,其中操作自适应引擎包括使系带系统与自适应引擎接合,以响应于释放命令松开系带系统。
294.在示例119中,示例115-118的主题包括,其中松开系带系统包括延长系带系统内的绑带缆绳的有效长度以释放自适应压缩服装的压缩。
295.在示例120中,示例115-119的主题包括,其中系列压缩和释放命令包括以预定义顺序排列的压缩命令、保持命令和释放命令。
296.在示例121中,示例115-120的主题包括,其中操作自适应引擎包括旋转绑带线轴,该绑带线轴接合集成到自适应压缩服装中的系带系统的绑带缆绳。
297.在示例122中,示例115-121的主题包括,其中在第一方向上旋转绑带限制缩短绑带缆绳的有效长度,并且将拉力引入系带系统中,该拉力在自适应压缩服装的一部分内产生压缩。
298.在示例123中,示例115-122的主题包括,其中在第二方向上旋转绑带线轴延长绑带缆绳的有效长度并释放了系带系统上的拉力。
299.在示例124中,示例115-123的主题包括,其中操作自适应引擎包括操纵自适应引擎内的绑带线轴,绑带线轴接合集成到系带系统中的系带系统的多根绑带缆绳。
300.示例125是一种自适应恢复系统,包括:第一自适应压缩服装,包括联接到第一自适应引擎的第一系带系统,该第一自适应引擎被构造成自动操纵系带系统上的拉力;第二自适应压缩服装,包括联接到第二自适应引擎的第二系带系统,该第二自适应引擎构造成自动操纵第二系带系统上的拉力;以及通信地耦接到第一自适应引擎和第二自适应引擎的控制电路,该控制器包括处理器和存储设备,该存储设备包括指令,该指令在由处理器执行时使得控制器向第一自适应引擎和第二自适应引擎发送命令以协调第一系带系统和第二系带系统的张紧。
301.在示例126中,示例125的主题包括,其中存储设备包括附加指令,用于传输命令以在第一自适应引擎和第二自适应引擎上产生一系列张紧和释放循环。
302.在示例127中,示例125-126的主题包括,其中第一自适应压缩服装被构造为向穿着者的上部腿区域施加压缩。
303.在示例128中,示例125-127的主题包括,其中第二自适应压缩服装被构造为向穿着者的下部腿区域施加压缩。
304.在示例129中,示例125-128的主题包括,其中第一自适应压缩服装被构造为向穿
着者的下部腿区域施加压缩。
305.在示例130中,示例125-129的主题包括自适应鞋类组件,该自适应鞋类组件包括联接到设置在鞋类组件内的第三系带系统的第三自适应引擎,其中第三自适应引擎和第三系带系统被构造为向穿着者的脚施加压力。
306.在示例131中,示例125-130的主题包括,其中自适应鞋类组件包括控制电路。
307.在示例132中,示例125-131的主题包括,其中控制电路是第三自适应引擎的部件。
308.在示例133中,示例125-132的主题包括,其中控制电路经由无线连接通信地耦接到第一自适应引擎和第二自适应引擎。
309.在示例134中,示例125-133的主题包括,其中控制电路被构造为协调第三系带系统的张紧与第一和第二系带系统的张紧。
310.在示例135中,示例125-134的主题包括,其中第一自适应引擎包括传感器,该传感器可操作地耦接到控制电路,被构造为输出:指示第一自适应压缩服装的穿着者的生理状况的信号;或者指示第一系带系统的状态的信号;并且其中控制电路还被构造成至少部分地基于传感器输出的信号来协调第一系带系统和第二系带系统的张紧。
311.在示例136中,示例125-135的主题包括,其中传感器是第一传感器,并且其中第二自适应引擎包括第二传感器,该第二传感器可操作地耦接到控制电路,被构造为输出指示穿着者的生理状况的信号或者第二系带系统的状态的信号;并且其中控制器还被构造成至少部分地基于由第一和第二传感器输出的信号来协调第一系带系统和第二系带系统。
312.示例137是用于操作自适应恢复系统的方法,包括:启动控制电路,该控制电路通信地耦接到第一自适应恢复服装上的第一自适应引擎和第二自适应恢复服装上的第二自适应引擎;在控制电路上接收压缩顺序的选择;从控制器向第一和第二自适应引擎发送一系列协调的压缩和释放命令;以及响应于一系列协调的压缩和释放命令操作第一和第二自适应引擎以执行压缩顺序。
313.在示例138中,示例137的主题包括,其中一系列协调的压缩和释放命令包括用于第一和第二自适应引擎的单独的压缩和释放命令,以在第一和第二自适应恢复服装之间产生差别压缩。
314.在示例139中,示例137和138的主题包括,其中系列协调压缩和释放命令还包括用于第一和第二自适应引擎的单独压缩和释放命令,以通过随时间改变差别压缩来动态改变差别压缩。
315.在示例140中,示例137-139的主题包括,其中操作第一和第二自适应引擎包括分别接合第一和第二系带系统,以响应于压缩命令分别张紧第一和第二系带系统。
316.在示例141中,示例137-140的主题包括,其中压缩命令包括用于第一自适应引擎的第一压缩命令和用于第二自适应引擎的第二压缩命令,其中第一压缩命令相对于第二压缩命令是可单独选择的。
317.在示例142中,示例137-141的主题包括,其中张紧第一和第二系带系统包括分别缩短第一和第二绑带缆绳的有效长度,以分别产生第一和第二自适应恢复服装的压缩。
318.在示例143中,示例137-142的主题包括,其中操作第一和第二自适应引擎包括分别接合第一和第二系带系统,以响应于释放命令分别松开第一和第二系带系统。
319.在示例144中,示例137-143的主题包括,其中松开系带系统包括延长系带系统内
的绑带缆绳的有效长度以释放自适应恢复服装的压缩。
320.在示例145中,示例137-144的主题包括,其中系列压缩和释放命令包括以预定顺序排列的压缩命令、保持命令和释放命令。
321.在示例146中,示例137-145的主题包括,其中操作第一和第二自适应引擎包括分别旋转第一和第二绑带线轴,分别接合分别集成到第一和第二自适应恢复服装中的第一和第二绑带缆绳。
322.在示例147中,示例137-146的主题包括,其中启动控制电路还包括通信耦接到集成到鞋类组件中的第三自适应引擎。
323.在示例148中,示例137-147的主题包括,其中传送系列协调压缩和释放命令包括传送系列协调压缩和释放命令的至少一部分到第三自适应引擎。
324.在示例149中,示例137-148的主题包括响应于由第三自适应引擎接收的系列协调压缩和释放命令的一部分来操作第三自适应引擎。
325.在示例150中,示例137-149的主题包括,其中由第三自适应引擎接收的系列协同压缩和释放命令的一部分创建以下至少一个:鞋类组件与第一和第二自适应恢复服装中的至少一个之间的差别压缩,以及鞋类组件与第一和第二自适应恢复服装中的至少一个之间的动态变化的差别压缩。
326.示例151是用于操作自适应压缩系统的方法,该方法包括:启动通信地耦接到第一自适应恢复服装和第二自适应恢复服装的控制电路,第一自适应恢复服装适于向第一身体部分施加压缩,第二自适应恢复服装适于向第二身体部分施加压缩;在控制电路上接收对协调恢复顺序的选择,所述协调恢复顺序包括一系列协调压缩和释放命令,所述一系列协调压缩和释放命令包括第一系列压缩和释放命令以及第二系列压缩和释放命令;在第一自适应恢复服装上执行第一系列压缩和释放命令;以及在第二自适应恢复服装上与第一自适应恢复服装协调地执行第二系列压缩和释放命令。
327.示例152是一种系统,其具有从鞋类传感器和/或服装传感器导出的并且由中央控制设备(例如,绑系带引擎内的智能电话或中央处理系统)处理的传感器和控制信息。
328.示例153是包括指令的至少一个机器可读介质,当由处理电路执行指令时,这些指令使得处理电路执行操作以实现示例1-152中的任何一个。
329.示例154是一种设备,包括实施示例1-152中任何一个的装置。
330.示例155是实现示例1-152中任何一个的系统。
331.示例156是实现示例1-152中任何一个的方法。
332.上面的详细描述包括对附图的引用,这些附图形成了详细描述的一部分。附图通过说明的方式示出了可以实施本发明的特定实施例。这些实施例在本文中也称为“示例”。这些示例还可以包括除了所示出或描述的那些元素之外的元素。然而,本发明人还设想了仅提供示出或描述的那些元件的示例。此外,本发明人还相对于特定示例(或其一个或多个方面),或相对于本文所示或所述的其他示例(或其一个或多个方面),设想了使用示出或描述的那些元素的任何组合或排列(或其一个或多个方面)的示例。
333.如果本文档与通过引用方式并入的任何文档之间的用法不一致,则以本文档中的用法为准。
334.在本文件中,专利文件中常见的术语“一个”或“一种”包括一个或多个,独立于“至
少一个”或“一个或多个”的任何其他情况或用法。在本文档中,除非另有说明,否则术语“或”用于表示非排他性或“a或b”包括“a但不包括b”,“b但不包括a”和“a和b”。。在所附权利要求中,术语“包括”和“其中”被用作相应术语“包含”和“在...中”的等效词。同样,在以下权利要求中,术语“包括”和“包含”是开放式的,即,包括在权利要求中的此类术语之后列出的元素之外的其他元素的系统、装置、物品、组合物、制剂或方法仍被认为属于该权利要求的范围。此外,在以下权利要求中,术语“第一”,“第二”和“第三”等仅用作标签,并且不旨在对其对象施加数字要求。
335.本文描述的方法示例,例如自适应支撑服装示例的操作,可以至少部分地由机器或计算机实现。一些示例可以包括编码有指令的计算机可读介质或机器可读介质,所述指令可操作以构造电子装置以执行如以上示例中所述的方法。这样的方法的实现可以包括代码,例如微代码、汇编语言代码、高级语言代码等。这样的代码可以包括用于执行各种方法的计算机可读指令。该代码可以构成计算机程序产品的一部分。此外,在示例中,代码可以有形地存储在一个或多个易失性、非暂时性或非易失性有形计算机可读介质上,例如在执行期间或在其他时间。这些有形计算机可读介质的示例可以包括但不限于硬盘,可移动磁盘,可移动光盘(例如光盘和数字视频磁盘),盒式磁带,存储卡或存储棒,随机存取存储器(ram),只读存储器(rom)等。
336.应当理解,以上描述意在说明而不是限制。例如,上述示例(和/或其方面)可以彼此组合使用。在回顾以上描述之后,例如可以由本领域的普通技术人员使用其他实施例。如果提供摘要,则应遵守美国法规37c.f.r.
§
1.72(b),以允许读者快速确定技术公开的性质。提交本文档时,应理解为不会将其用于解释或限制权利要求的范围或含义。另外,在以上描述中,各种特征可以被组合在一起以简化本公开。这不应被解释为意在意欲使未声明的公开特征对于任何声明都是必不可少的。而是,发明主题可以在于少于特定公开实施例的所有特征。因此,以下权利要求由此作为示例或实施例并入详细说明中,每个权利要求作为独立的实施例而独立存在,并且可以预期的是,这样的实施例可以以各种组合或排列彼此组合。因此,本发明的范围应该参考所附权利要求以及这些权利要求所赋予的等同物的全部范围来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1