一种手术机器人控制方法与流程
1.本发明涉及手术机器人技术领域,特别涉及一种手术机器人控制方法。
背景技术:
2.外科手术机器人是一种集诸多学科为一体的新型医疗器械,以达芬奇为代表的微创手术机器人是当前医疗器械信息化、程控化、智能化的一个重要发展方向。
3.现有腹腔手术机器人:达芬奇使用平行四边形的专用构型,拥有物理远心点;现有的手术机器人控制方法仅能控制手术机器人手臂本身围绕物理远心点伸缩旋转,术前、术中调整远心点位置,需要通过额外的变位机构和控制方法对机器人基座进行平移和旋转,使用不便。
4.因此,如何能够提供一种既可适用于绕远心点实现伸缩旋转、又可适用于调整远心点位置的手术机器人控制方法是本领域技术人员亟需解决的技术问题。
技术实现要素:
5.本发明的目的是提供一种手术机器人控制方法,通过主从手的控制方式控制手术机器人,控制精度高,操作便捷精准;在从手的控制方式中采用通用机器人和器械机器人分工的方式,既可适用于绕远心点实现伸缩旋转、又可适用于调整远心点位置。
6.为实现上述目的,本发明提供一种手术机器人控制方法,包括:
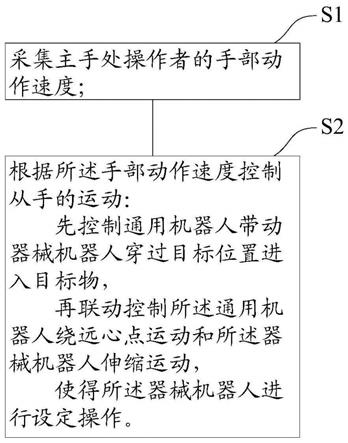
7.采集主手处操作者的手部动作速度;
8.根据所述手部动作速度控制从手的运动:根据所述手部动作速度控制从手的运动:先控制通用机器人带动器械机器人穿过目标位置进入目标物,再联动控制所述通用机器人绕远心点运动和所述器械机器人伸缩运动,使得所述器械机器人进行设定操作。
9.优选地,所述手部动作速度包括笛卡尔平移速度和笛卡尔旋转速度。
10.优选地,所述根据所述手部动作速度控制从手的运动的步骤之前,还包括:
11.所述手部动作速度由主手控制器采集后进行滤波和倍率处理,并发送给从手控制器进行从手的控制。
12.优选地,所述再联动控制所述通用机器人绕远心点运动和所述器械机器人伸缩运动的步骤之前,还包括:
13.建立远心点。
14.优选地,所述建立远心点的步骤,具体包括:
15.在所述目标位置开口,插入戳卡;
16.将所述器械机器人的戳卡座拖动到所述戳卡处;
17.连接所述戳卡座和所述戳卡;
18.计算得到远心点的位置。
19.优选地,所述计算得到远心点的位置的步骤,具体包括:
20.根据所述通用机器人的全部通用运动轴处设置的编码器,获取全部所述通用运动
轴的实际位移或实际角度,计算所述远心点的位置。
21.优选地,所述再联动控制所述通用机器人绕远心点运动和所述器械机器人伸缩运动的步骤之前,还包括:
22.通过雅各布比矩阵的逆矩阵,根据所述器械机器人末端的期望笛卡尔速度映像得到所述器械机器人的全部器械轴速度。
23.优选地,所述器械轴速度包括与物理轴对应的器械物理轴轴速度以及与虚拟轴对应的器械虚拟轴轴速度。
24.优选地,所述映射得到所述器械机器人的全部器械轴速度的步骤之后,还包括:
25.通过雅各布比矩阵的逆矩阵,根据所述器械虚拟轴轴速度映像得到所述通用机器人的全部通用轴速度。
26.优选地,所述使得所述器械机器人进行设定操作的步骤之后,还包括:
27.控制所述器械机器人穿过所述远心点由所述目标物取出。
28.相对于上述背景技术,本发明所提供的手术机器人控制方法包括两步,在第一步中采集主手处操作者的手部动作速度,在第二步中根据第一步采集的手部动作速度控制从手的运动;第二步还可进一步细分为三步,包括:先控制通用机器人带动器械机器人穿过患者创口进入患者体内,再联动控制通用机器人绕远心点运动和器械机器人伸缩运动,使得器械机器人进行手术。该手术机器人控制方法通过主从手的控制方式控制手术机器人,操作者由主手处进行手部操作,输入的手部动作转化为具体的手部动作速度,从手根据输入主手的手部动作速度进行相应的运动,控制精度高,操作便捷精准,既可适用于绕远心点实现伸缩旋转、又可适用于调整远心点位置。
附图说明
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
30.图1为本发明实施例提供的手术机器人控制方法的流程示意图;
31.图2为本发明实施例提供的手术机器人的结构示意图;
32.图3为图2中器械机器人的结构示意图。
33.其中:
34.1-通用机器人、2-器械机器人、11-通用运动轴、21-直线轴、22-手术器械、23-戳卡座、24-戳卡、25-器械座、200-正交虚拟轴、221-器械运动轴、2000-远心点。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.为了使本技术领域的技术人员更好地理解本发明方案,下面结合附图和具体实施
方式对本发明作进一步的详细说明。
37.请参考图1至图3,其中,图1为本发明实施例提供的手术机器人控制方法的流程示意图,图2为本发明实施例提供的手术机器人的结构示意图,图3为图2中器械机器人的结构示意图。
38.在第一种具体的实施方式中,本发明所提供的手术机器人控制方法包括两步:s1、采集主手处操作者的手部动作速度;s2、根据手部动作速度控制从手的运动。
39.手术机器人系统包括通用机器人1和器械机器人2,通用机器人1可采用五轴、六轴、七轴等,具有对应数量的通用运动轴11;通用机器人1与通用运动轴11有数量相同的自由度;器械机器人2包括直线轴21,直线轴21包括直线引导部和滑动连接的滑块,戳卡座23设于直线引导部,器械座25设于滑块,器械座25上安装手术器械22;器械机器人2具有正交虚拟轴200、直线轴21以及手术器械22的器械运动轴221的多个自由度。其中,手术器械22是指可更换的部分,不包含直线引导部和器械座25。
40.在本实施例中,该手术机器人的控制方法采用主从手的控制方式,由操作者在主手处进行手部控制,主手的传感器将手部动作转化为输入主手的控制器的手部动作速度,进而将s1中采集到的手部动作速度输入s2的从手的控制器,进而实现主手对从手的运动的控制。
41.其中,步骤s2还可细分为:s21、先控制通用机器人1带动器械机器人2穿过目标位置进入目标物;s22、再联动控制通用机器人1绕远心点2000运动和器械机器人2伸缩运动;s23、使得器械机器人2进行设定操作。
42.需要说明的是,本实施例中的手术机器人控制方法,不仅适用于目标物为假人时的教学形式的模拟手术,还适用于目标物为真人时的真实手术。当进行真实手术时,上述目标物对应于人体,目标位置对应于患者创口,器械机器人2进行的设定操作即为真实手术时的各种操作。更具体地说,s21、先控制通用机器人1带动器械机器人2穿过患者创口进入患者体内;s22、再联动控制通用机器人1绕远心点2000运动和器械机器人2伸缩运动;s23、使得器械机器人2进行手术。
43.在本实施例中,只有在插入器械时通用机器人1才静止不动;在插入器械后的手术工程中,通用机器人1一直在围绕远心点2000运动,也就是说,通用机器人1在器械机器人2动作时,会绕远心点2000运动,器械末端的位姿和轨迹由通用机器人1和器械机器人2共同合成。该手术机器人的控制方法采用分别控制通用机器人1和器械机器人2的方式,也就是说,对于不同的机器人采用不同的控制方法,进而实现不同的运动控制,实现不同的功能作用。具体而言,通用机器人1与器械机器人2相连,通用机器人1可带动器械机器人2运动,因而通过从手的控制器控制通用机器人1运动,使得通用机器人1带动器械机器人2绕远心点2000运动,进而由器械机器人2的末端在体内完成手术。
44.具体而言,手部动作速度包括笛卡尔平移速度和笛卡尔旋转速度。
45.除此以外,在步骤s2之前,也即根据手部动作速度控制从手的运动的步骤之前,还包括:手部动作速度由主手控制器采集后进行滤波和倍率处理,并发送给从手控制器进行从手的控制。
46.其中,在步骤s22之前,还包括:建立远心点2000。
47.具体而言,建立远心点2000的步骤,具体包括:在目标位置开口,插入戳卡24;将器
械机器人2的戳卡座23拖动到戳卡24处;连接戳卡座23和戳卡24;计算得到远心点2000的位置。其中,在真实手术时,目标位置对应于真实手术部位。
48.由于机器人上设计有戳卡座23,远心点2000相对于基座坐标系的笛卡尔位置可在连接戳卡24瞬间通过输入各关节编码器的实际角度或实际位移到机器人正运动学模型。
49.插入器械时,器械通过空间位置固定的直线引导部和空间位置固定的戳卡24插入。戳卡24与直线引导部平行,简化了插入器械的操作难度;远心点2000位置可以根据临床需要在术中调整,如遇病人创口移动,可拖动戳卡座23平移来快速释放戳卡24处的压力,避免二次伤害;如遇紧急情况故障停电等需快速取出器械继续手术,本构型沿空间位置固定的直线引导部和空间位置固定的戳卡24允许临床医护人员直线拉出器械以保护病人创口不受二次伤害。
50.其中,计算得到远心点2000的位置的步骤,具体包括:根据通用机器人1的全部通用运动轴11处设置的编码器,获取全部通用运动轴11的实际位移或实际角度,计算远心点2000的位置。
51.具体而言,通用运动轴11的设置方式包括旋转轴和直线轴,与此对应的,其位移变化包括角位移和线位移,也即反馈的实际角度和反馈的实际距离;实际角度对应于通用运动轴11为旋转轴时获取旋转轴的位移变化的角度编码器,实际距离对应于通用运动轴11为直线轴时获取直线轴的位移变化的距离编码器。
52.除此以外,在步骤s23之前,也即再控制器械机器人2穿过远心点2000进入患者体内进行手术的步骤之前,还包括:通过雅各布比矩阵的逆矩阵,根据器械机器人2末端的期望笛卡尔速度映像得到器械机器人2的全部器械轴速度。
53.其中,器械轴速度包括与物理轴对应的器械物理轴轴速度以及与虚拟轴对应的器械虚拟轴轴速度,虚拟轴的动作由通用机器人1各轴联动绕远心点2000运动组成。
54.具体而言,映射得到器械机器人2的全部器械轴速度的步骤之后,还包括:通过雅各布比矩阵的逆矩阵,根据器械虚拟轴轴速度映像得到通用机器人1的全部通用轴速度。
55.第一步:使用计算器械机器人2每个轴的速度,其中,表示器械机器人2各关节速度(n维向量,器械机器人轴数n=6),j-1
表示器械机器人2构型对应的雅可比矩阵的逆矩阵,v表示用户期望的器械末端笛卡尔速度(6维向量),v=[v
x
,vy,vz,ω
x
,ωy,ωz],最终计算得到的器械机器人2关节速度
[0056]
第二步:使用计算通用机器人1每个轴的速度,其中,表示通用机器人1各关节速度(n维向量,通用机器人轴数n=5、6、7....),j-1
表示通用机器人1构型对应的雅可比矩阵的逆矩阵,v表示远心点的目标速度(6维向量),可比矩阵的逆矩阵,v表示远心点的目标速度(6维向量),可比矩阵的逆矩阵,v表示远心点的目标速度(6维向量),其中和是第一步计算得到的。最终计算得到通用机器人1关节速度
[0057]
在本实施例中,远心点2000建立流程:
[0058]
1.在连接戳卡24之前,机器人各关节转动角度不受约束,处于自由拖动模式。
[0059]
2.在手术部位开口,插入戳卡24。
[0060]
3.拖动各轴,将直线引导部底部的戳卡座23拖动到戳卡24附近位置。
[0061]
4.连接戳卡24与戳卡座23,传感器检测到连接建立后,控制系统通过输入各关节编码器实际角度或实际距离到机器人正运动学模型中计算得到远心点2000位置。控制系统对机器人各关节转动角度进行约束,此时通用机器人1只能围绕戳卡24通过的远心点2000运动,但此时不控制器械通过远心点2000。
[0062]
5.连接手术器械22和器械座25,由直线引导部控制器械通过远心点2000进入人体。
[0063]
6.实施控制方法:通过雅各布比矩阵的逆矩阵,将器械末端的期望笛卡尔速度映像到器械机器人2的六个轴速度上,此时可得到四个电机的目标速度和正交虚拟轴200也即两个虚拟轴的目标速度。再将正交虚拟轴200的目标速度通过雅各布比矩阵的逆矩阵映射到通用机器人1的各个物理轴速度上,此时可得到所有电机的目标速度控制指令。
[0064]
最终,在步骤s23之后,还包括:控制器械机器人2再次穿过远心点2000由目标物取出,其中,在真实手术时,目标物对应于患者人体,而步骤s23具体为控制器械机器人2再次穿过远心点2000由1患者体内取出。
[0065]
在本实施例中,远心点2000丢失流程:
[0066]
1.沿直线引导部直线退出(拉出)器械。
[0067]
2.分离戳卡座23和戳卡24。
[0068]
3.自由拖动机器人各关节到空置区域。
[0069]
该手术机器人系统在控制算法层面实际是由两个独立的机器人共同组成,每个机器人有自己的控制目标。一个控制器械末端在人体中的位置和姿态,另一个控制直线引导部绕远心点2000运动。所以控制器可以是两个分开独立的,也可以是一个,同应属于本实施例的说明范围;通用机器人1末端不随器械的伸缩运动而移动。本构型中通用机器人1的控制器不负责控制手术器械22末端的位置和姿态,仅控制直线引导部绕远心点2000运动;手术器械22末端的位置和姿态控制包含在器械机器人2的控制模型中。
[0070]
需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
[0071]
以上对本发明所提供的手术机器人控制方法进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1