一种消毒机器人的制作方法
1.本发明涉及机器人设备技术领域,特别是涉及一种消毒机器人。
背景技术:
2.随着新型冠状病毒的出现,人们对于周边生活环境的消毒工作也越来越重视,而以机器人代替工人的消毒方式,也成为各个城市消毒工作的重要组成部分。但是,目前来看,消毒机器人多用于马路、街道等一些空旷室外环境的消毒工作,并且存在着体积过大,自主移动能力不强等缺点,对于一些环境复杂、空间狭小的室内区域,不能做到很好的适用。相比空旷的室外,环境狭小的室内更容易产生有害细菌,而目前对于室内环境的消毒工作,还多采用人工方式进行,这样一来,就加大了消毒人员的病毒感染隐患。
技术实现要素:
3.基于此,本发明的目的是提供一种消毒机器人,提高了导航和定位的精确性。
4.为实现上述目的,本发明提供了如下方案:
5.一种消毒机器人,所述消毒机器人包括:
6.移动底盘,用于移动;
7.图像采集装置,设置在所述移动底盘上,用于采集图像信息;
8.下位机,设置在所述移动底盘上,用于驱动所述移动底盘移动;
9.惯性测量单元,设置在所述移动底盘上,用于采集所述移动底盘的惯性信息;
10.上位机,安装机器人操作系统,与所述下位机电连接,用于接收所述图像信息和惯性信息,实现所述移动底盘的定位和导航;
11.喷洒装置,设置在所述移动底盘上,与所述上位机电连接,用于喷洒消毒液。
12.可选地,所述移动底盘左右两端各安装一个驱动轮,所述移动底盘的前后两端各安装一个万向轮。
13.可选地,所述消毒机器人还包括:电机驱动模块,安装在所述移动底盘上,用于接收所述下位机的驱动指令;
14.电机,与所述驱动轮连接,并与所述电机驱动模块电连接,用于驱动所述驱动轮转动。
15.可选地,所述喷洒装置设置在所述移动底盘顶部的中心位置。
16.可选地,所述惯性测量单元包括九轴的mpu9250。
17.可选地,所述图像采集装置包括kinect摄像头。
18.可选地,所述下位机为stm32单片机。
19.可选地,所述直流减速电机为jga25-371型号直流减速电机。
20.可选地,所述上位机包括移动终端。
21.可选地,所述惯性信息包括所述移动底盘的速度和加速度。
22.根据本发明提供的具体实施例,本发明公开了以下技术效果:
23.本发明公开了一种消毒机器人,包括:移动底盘,用于移动;图像采集装置,设置在所述移动底盘上,用于采集图像信息;下位机,设置在所述移动底盘上,用于驱动所述移动底盘移动;惯性测量单元,设置在所述移动底盘上,用于采集所述移动底盘的惯性信息;上位机,安装机器人操作系统,与所述下位机电连接,用于接收所述图像信息和惯性信息,实现所述移动底盘的定位和导航;喷洒装置,设置在所述移动底盘上,与所述上位机电连接,用于喷洒消毒液。通过设置在移动底盘上的图像采集装置采集环境信息,通过惯性测量单元采集移动底盘移动的速度和加速度,提高了消毒机器人导航和定位的精确性。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
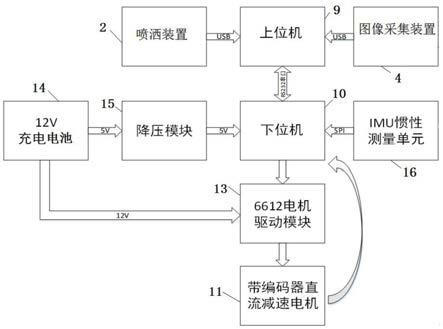
25.图1为本发明一种消毒机器人结构框架示意图;
26.图2为本发明一种消毒机器人整体结构示意图;
27.图3为本发明一种消毒机器人整体结构俯视图;
28.图4为本发明一种消毒机器人移动底盘仰视示意图;
29.图5为本发明一种消毒机器人移动底盘俯视的剖面示意图;
30.图6为本发明一种消毒机器人电机、电机驱动模块和单片机连接示意图;
31.标号说明:
32.1、移动底盘;2、喷洒装置;3、出气孔;4、图像采集装置;5、万向轮;6、驱动轮;7、电源开关;8、指示灯;9、上位机;10、下位机;11、直流减速电机;12、进线孔;13、电机驱动模块;14、12v充电电源;15、降压模块;16、惯性测量单元;17、充电接口。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.本发明的目的是提供一种消毒机器人,提高了导航和定位的精确性。
35.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
36.本发明公开了一种消毒机器人,如图1-5所示,本发明一种消毒机器人包括:移动底盘1,用于移动。
37.图像采集装置4,设置在所述移动底盘1上,用于采集图像信息。
38.下位机10,设置在所述移动底盘1上,用于驱动所述移动底盘1移动。
39.惯性测量单元16,设置在所述移动底盘1上,用于采集所述移动底盘1的惯性信息。
40.上位机9,安装机器人操作系统,与所述下位机10电连接,用于接收所述图像信息和惯性信息,实现所述移动底盘1的定位和导航。
41.喷洒装置2,设置在所述移动底盘1上,与所述上位机9电连接,用于喷洒消毒液。
42.所述移动底盘1左右两端各安装一个驱动轮6,所述移动底盘1的前后两端各安装一个万向轮5。移动底盘1通过驱动轮6和万向轮5采用差分方式进行转向。
43.所述消毒机器人还包括:电机驱动模块13,安装在所述移动底盘1上,用于接收所述下位机10的驱动指令;电机11,与所述驱动轮6连接,并与所述电机驱动模块13电连接,用于驱动所述驱动轮6转动。
44.所述喷洒装置2设置在所述移动底盘1顶部的中心位置。
45.所述惯性测量单元16包括九轴的mpu9250。
46.所述图像采集装置4包括kinect摄像头。kinect摄像头安装在移动底盘1顶部。kinect摄像头采集周围环境的rgb和深度信息。结合里程计和imu完成监控和定位功能。对消毒机器人在室内复杂环境中进行了更加精确的定位,保障了机器人的自主导航功能。
47.所述下位机10为stm32单片机。
48.所述电机11为jga25-371型号直流减速电机11。
49.所述上位机9包括移动终端。
50.所述惯性信息包括所述移动底盘1的速度和加速度。
51.上位机9和下位机10均采用嵌入式芯片,使消毒机器人小巧轻便,适合在狭小的室内空间进行移动。
52.本发明具体实施例中,移动底盘1上还安装有电源,电源为12v充电电池14。选取树莓派开发板作为上位机9,通过ros(robot operating system,机器人操作系统)的分布式架构方式完成定位、建图和导航功能,上位机9将电机控制指令下发到下位机10,并接收kinect摄像头信息和下位机10的反馈信息,下位机10的反馈信息包括惯性信息和里程计信息,下位机10选择stm32单片机来接收上位机9发送的指令,驱动电机完成机器人的移动。上位机9发送的指令包括左右轮的速度指令,下位机10接收上位机9发送的速度指令,并将速度指令转化为左右轮的线速度和角速度,控制电机驱动完成机器人的移动,同时将采集到的里程计信息(x,y坐标、线速度、角速度和方向角)、imu(inertialmeasurementunit,惯性测量单元)信息(速度和加速度)发送给上位机9。上位机9基于ros发开,提高了研发中的代码复用率,便于以后新功能的开发拓展。
53.所述上位机9和下位机10以串口方式完成通信。分别在底盘左右两端安装驱动轮6,底盘前后端各安装一个万向轮5,采用差分方式进行转向。在底盘顶部安装摄像头采集数据,结合imu和里程计信息完成定位功能。考虑到设备为室内环境使用,用于消毒液喷洒的喷洒装置2采用喷雾器代替,将消毒液进行雾化喷洒。采用便宜常见的喷雾器作为消毒液喷洒设备,将消毒液以雾气状态喷洒到室内,既保障了室内环境,又起到了消毒作用。
54.本发明具体实施例中移动底盘1采用亚克力板或其他适用于室内移动设备的底盘,电机驱动模块13具体为6612电机驱动板。按照图5所示的位置,分别将12v充电电池14块、带编码器直流减速电机11、驱动轮6、万向轮5、6612电机驱动板、降压模块15、imu、stm32单片机和树莓派开发板固定在移动底盘1的相应位置上,其中驱动轮6为移动底盘1的主动轮。将树莓派的rs232串口接到stm32单片机10上,在给树莓派供电的同时,完成上位机9和下位机10之间的通信。树莓派搭载ros系统,在对kinect摄像头4和imu16供电的同时,采集其数据完成slam(simultaneous localization and mapping,同步定位与建图)和导航功
能,发送控制指令给stm32单片机10,并接受stm32单片机10发送的里程计信息,用于实现定位功能。将带编码器直流减速电机11和驱动轮6连接,一起固定到移动底盘1的左右两侧,考虑到移动底盘1的稳定性,在移动底盘1前后端各固定一个万向轮5。根据图6完成带编码器直流减速电机11、电机驱动模块13和stm32单片机10间的连线。最后,12v充电电池14直接给电机驱动模块13供电,并通过电池降压模块1515为stm32单片机供电。在机器人移动底盘1顶部中心位置安装喷雾器2,并通过usb接口由树莓派供电,消毒液由出气口3喷出。电源开关77为机器人设备总开关,充电接口17为12v充电电池14的充电接口,指示灯8指示机器人工作、充电和充电完成的三种状态。
55.本发明具体实施例中,树莓派可采用树莓派b+型号,stm32单片机10可使用stm32f103系列,kinect摄像头4采用kinect2,imu16可采用九轴的mpu9250,电机驱动模块13选用6612电机驱动板,直流减速电机11选用jga25-371型号直流减速电机11,喷洒装置2选用普通常见的带usb口的加湿器。
56.本发明具体实施例中,通过手柄、手机或者电脑与消毒机器人的上位机9电连接,实现对消毒机器人进行远程控制。通过手柄、手机或者电脑向消毒机器人发布行动指令,消毒机器人收到指令后进行自主导航移动(移动方式分为两种:机器人根据指定线路完成的自主巡线导航;机器人根据起始点位置完成的自主规划导航)。
57.用户使用无线网通过手机或者电脑向消毒机器人发布命令,并且能观看到kinect摄像头采集到的画面,对消毒工作进行实时监控。消毒机器人在接收到移动底盘1的目标位姿信息后,根据不同的导航模式(模式一:消毒机器人根据指定线路完成的自主巡线导航;模式二:消毒机器人根据起始点位置完成的自主规划导航)完成自主移动,同时喷洒消毒液。除此功能外,用户亦可像使用遥控车的方式,通过手柄直接控制机器人移动,增加了机器人使用的灵活性。
58.本发明的室内自主移动消毒机器人设备的工作原理如下:
59.通过kinect摄像头4对周边环境信息进行采集,将采集到的图形信息和深度信息发送到树莓派。树莓派在ros系统架构中根据kinect摄像头4、imu16的信息和里程计信息,完成slam和导航功能。使用者使用手机或电脑和树莓派完成远程通讯,向树莓派发送导航目标点指令,树莓派收到目标指令,完成定位、路径规划和导航等功能后,将左右轮的速度指令通过串口发送给stm32单片机10,stm32单片机10收到指令后,将指令转化为左右轮的线速度和角速度,并完成pid(proportional integral derivative,比例积分导数)控制,stm32单片机下发pwm波给6612电机驱动模块13,驱动带编码器直流减速电机11动作,使消毒机器人移动。在消毒机器人移动同时,stm32单片机10通过轮子上的编码器采集里程计信息,反馈给上位机9与kinect信息相结合,使机器人的定位更加精确。喷雾器2连接树莓派的usb口,由树莓派控制喷雾器2的工作和停止。
60.与现有技术相比,本发明室内机器人设备具有如下优点:
61.1.本发明装置不同于其他消毒机器人多用于户外消毒工作,本发明为适用于室内环境的消毒机器人,解决了一些无法由人工直接进行消毒的室内区域的消毒工作,保障消毒工作的安全展开。
62.2.本发明装置与其他消毒机器人相比,考虑到室内环境的复杂性,根据kinect摄像头采集的图像信息和imu采集的惯性信息进行定位,提高了定位精度。现有消毒机器人多
用于室外,采用激光进行定位和避障,成本过高,并且采集到的信息不丰富。本发明消毒机器人设备采用的kinect摄像头在降低了机器人成本的同时丰富了采集信息,在完成机器人定位的同时,还增加了监控功能,便于使用者对消毒工作的实时监控。
63.3.本发明装置与其他消毒机器人相比,最大的不同在于:本发明机器人拥有三种不同的移动方式,分别为:(1)机器人根据指定线路完成的自主巡线导航;(2)机器人根据起始点位置完成的自主规划导航;(3)使用者通过手柄控制机器人进行前后左右移动的传统移动方式。
64.4.本发明装置与其他消毒机器人相比,在喷洒消毒液方面,考虑到机器人的室内工作环境,故采用常见的喷雾器作为喷洒设备,只需将消毒液倒入喷雾器后上电即可。在简化了操作的同时,将消毒液雾化喷出,对室内环境影响较小。
65.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
66.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1