一种精准自动穿刺系统的制作方法
1.本实用新型涉及医疗器械设计技术领域,具体涉及一种精准自动穿刺系统。
背景技术:
2.微创手术,顾名思义就是微小创伤的手术。是指利现代医疗器械及相关设备进行的手术。微创手术的优点是创伤小、疼痛轻、恢复快是每个需要手术的病人的梦想,微创外科使这个梦想成为了现实。早期微创手术,是指通过腹腔镜、胸腔镜等内窥镜在人体内施行手术的一种新技术。微创手术具有创伤小、疼痛轻、恢复快的优越性。微创外科的出现及在医学领域的广泛应用是最近十几年的事。1987年法国医生mouret偶然完成第一例lc并没有想到它标志着新的医学里程碑的诞生。微创概念的形成是因为整个医学模式的进步,是在“整体”治疗观带动下产生的。微创手术更注重病人的心理、社会、生理(疼痛)、精神风貌、生活质量的改善与康复,最大程度体贴病人,减轻病人的痛苦。
3.微创穿刺外科技术意味着在一定医疗风险下避免大切口,采用微小切口或穿刺通道,运用特殊的器械和装置,在影像仪器监视下或导航技术引导下,从正常的解剖结构到达病变处,使用各种微型的手动或电动器械和器材,在可视条件下完成整个手术过程,以达到比传统或标准的脊柱手术切口小、组织创伤小、出血少、操作精确度高、效果肯定、术后功能恢复快为目的。
4.目前穿刺已有的方案为借助医疗影像系统以及导航技术,由医生手持穿刺针进行手动穿刺。这种方案在很大程度上提高了穿刺的准确性,但由于是医生手动穿刺,每个医生的穿刺经验不同避免不了会产生误差,导致多次重复穿刺。
技术实现要素:
5.针对背景技术中的问题,本实用新型提供了一种精准自动穿刺系统,包括:
6.穿刺执行机构,穿刺针安装于所述穿刺执行机构上,所述穿刺执行机构用于驱动所述穿刺针对目标位置进行穿刺;
7.机械臂,所述穿刺执行机构安装在所述机械臂,用于带动所述穿刺执行机构实现多自由度的移动;
8.扫描装置,用于获取需穿刺目标区域的扫描图像,从而定位穿刺靶点;
9.控制器,连接所述穿刺执行机构、机械臂、扫描装置;所述控制器根据所述扫描装置获取的穿刺靶点,控制所述机械臂带动所述穿刺执行机构转移至所述穿刺针对准所述穿刺靶点,所述控制器再控制所述穿刺执行机构驱动所述穿刺针进行穿刺。
10.较佳地,所述穿刺执行机构包括:
11.壳体,安装在所述机械臂的执行端上;
12.穿刺针锁紧器,可移动的安装在所述壳体上;
13.穿刺针导向器,安装在所述壳体上;所述穿刺针一端安装到所述穿刺针锁紧器上,另一端可移动的穿设在所述穿刺针导向器内;
14.第一驱动装置,安装在所述壳体上,用于驱动所述穿刺针锁紧器现对于所述壳体移动,从而带动所述穿刺针相对于所述穿刺针导向器、所述壳体移动。
15.较佳地,所述第一驱动装置包括第一驱动电机和第一驱动丝杆,所述第一驱动丝杆的轴向平行于所述穿刺针的移动方向,所述穿刺针锁紧器安装在所述第一驱动丝杆上,所述第一驱动电机与所述第一驱动丝杆连接,用于驱动所述第一驱动丝杆转动,从而带动所述穿刺针锁紧器沿所述第一驱动丝杆移动。
16.较佳地,所述穿刺执行机构包括用于限定所述穿刺针锁紧器移动距离的限位组件。
17.较佳地,所述限位组件包括:
18.导向杆,安装在所述壳体上,且其轴向平行于所述穿刺针的移动方向;所述穿刺针锁紧器套设于所述导向杆上,且所述穿刺针锁紧器可沿所述导向杆轴向移动;
19.限位滑块,安装于所述导向杆上,且所述限位滑块可沿所述导向杆轴向移动;
20.第二驱动装置,连接所述限位滑块,用于驱动所述限位滑块沿所述导向杆移动;所述穿刺针移动前,所述第二驱动装置带动所述限位滑块沿所述导向杆移动至目标位置处,所述第一驱动装置再带动所述穿刺针锁紧器沿所述导向杆移动,移动至所述限位滑块相接触时,所述穿刺针锁紧器停止移动。
21.较佳地,所述第二驱动装置包括第二驱动电机和第二驱动丝杆,所述第二驱动丝杆的轴向平行于所述穿刺针的移动方向,所述限位滑块安装在所述第二驱动丝杆上,所述第二驱动电机与所述第二驱动丝杆连接,用于驱动所述第二驱动丝杆转动,从而带动所述限位滑块沿所述第二驱动丝杆移动。
22.较佳地,所述穿刺针锁紧器包括第一外壳,所述第一外壳上设有两相对的第一锁紧片、用于驱动两所述第一锁紧片打开或闭合的第一驱动组件;
23.所述穿刺针导向器包括第二外壳,所述第二外壳上设有两相对的第二锁紧片、用于驱动两所述第二锁紧片打开或闭合的驱动组件的第二驱动组件;
24.所述穿刺针的一端夹持在两所述第一锁片之间,所述穿刺针的另一端上套设有一导向套,所述导向套夹持在两所述第二锁片之间。
25.较佳地,所述第一驱动组件/第二驱动组件包括:
26.驱动板,其上设置有一圆弧形齿部、两斜槽,两所述斜槽分布在所述圆弧形齿部的两侧;两所述锁片可移动的安装在所述第一外壳/第二外壳上,且所述锁片朝向所述驱动板的一侧上设置有凸部,两所述锁片上的凸部分别伸进两所述斜槽内,并可沿所述斜槽移动;
27.第一传动齿轮,与所述圆弧形齿部啮合;
28.第三驱动装置,用于驱动第一传动齿轮转动,通过所述圆弧形齿部带动所述驱动板移动,所述驱动板移动过程中,所述凸部沿着所述斜槽移动,从而带动两锁片沿着壳体相对移动实现夹持或相背移动实现打开。
29.较佳地,所述穿刺针锁紧器和所述穿刺针导向器共用一个所述第三驱动装置,所述第三驱动装置包括:
30.驱动连杆,所述第一传动齿轮和所述第二传动齿轮轴向可移动的套设在所述驱动连杆上,所述驱动连杆转动带动所述第一传动齿轮和所述第二传动齿轮同步转动;
31.第三驱动电机,驱动所述驱动连杆或所述第一传动齿轮或所述第二传动齿轮转
动。
32.较佳地,所述机械臂采用六自由度机械臂。
33.较佳地,所述扫描装置采用ct扫描仪。
34.较佳地,还包括光学跟踪器,与所述控制器连接,所述光学跟踪器用于跟踪所述穿刺针。
35.较佳地,还包括显示器,与所述控制器连接,用于显示所述控制器获取的数据。
36.本实用新型由于采用以上技术方案,使之与现有技术相比,具有以下的优点和积极效果:
37.本实用新型提供的精准自动穿刺系统,通过控制器6控制穿刺执行机构、机械臂、扫描装置之间的协调工作,从而实现自动化精准穿刺的功能,摆脱人工穿刺的干预,整个穿刺过程相较于传统的手动穿刺具有效率高,速度快,精准度高等优点。
附图说明
38.结合附图,通过下文的述详细说明,可更清楚地理解本实用新型的上述及其他特征和优点,其中:
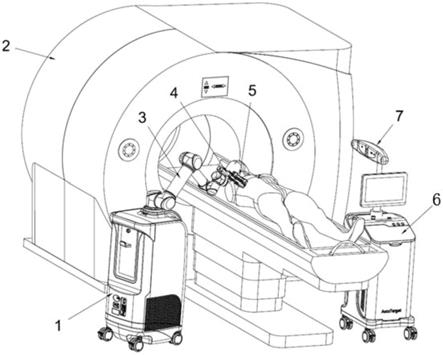
39.图1为本实用新型提供的精准自动穿刺系统的结构示意图;
40.图2为本实用新型中穿刺执行机构的结构示意图;
41.图3为本实用新型中穿刺执行机构的内部结构示意图;
42.图4为本实用新型中穿刺锁针紧器和穿刺针导向器内部结构一;
43.图5为本实用新型中穿刺锁针紧器和穿刺针导向器内部结构二;
44.图6为本实用新型中驱动板的结构示意图;
45.图7为本实用新型中锁片的结构示意图。
具体实施方式
46.参见示出本实用新型实施例的附图,下文将更详细地描述本实用新型。然而,本实用新型可以以许多不同形式实现,并且不应解释为受在此提出之实施例的限制。相反,提出这些实施例是为了达成充分及完整公开,并且使本技术领域的技术人员完全了解本实用新型的范围。这些附图中,为清楚起见,可能放大了层及区域的尺寸及相对尺寸。
47.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
48.参照图1
‑
7,本实用新型提供了一种精准自动穿刺系统,包括穿刺执行机构4、机械臂3、扫描装置2和控制器6;穿刺针5安装于穿刺执行机构4上,穿刺执行机构4用于驱动穿刺针5对目标位置进行穿刺;穿刺执行机构4安装在机械臂3,用于带动穿刺执行机构4实现多自由度的移动;扫描装置2用于获取需穿刺目标区域的扫描图像,以定位穿刺靶点;控制器6通过有线或无线的方式连接穿刺执行机构4、机械臂3、扫描装置2;控制器6根据扫描装置2获取的穿刺靶点,控制机械臂3带动穿刺执行机构4转移至穿刺针5对准穿刺靶点,控制器6再控制穿刺执行机构4驱动穿刺针5进行穿刺。
49.本实用新型提供的精准自动穿刺系统,通过控制器6控制穿刺执行机构4、机械臂
3、扫描装置2之间的协调工作,从而实现自动化精准穿刺的功能,摆脱人工穿刺的干预,整个穿刺过程相较于传统的手动穿刺具有效率高,速度快,精准度高等优点。
50.在本实施例中,结合图2
‑
7,穿刺执行机构包括壳体401,壳体401通过安装板8等结构安装在机械臂3的执行端上;壳体401上还设置有穿刺针锁紧器402、穿刺针导向器403和第一驱动装置,穿刺针锁紧器402可移动的安装在壳体401上;穿刺针导向器403固定安装在401壳体上;穿刺针5一端安装到穿刺针锁紧器402上,另一端可移动的穿设在穿刺针导向器403内;壳体401还安装有第一驱动装置,用于驱动穿刺针锁紧器402现对于壳体401移动,从而带动穿刺针5相对于穿刺针导向器402、壳体401移动。本实施例通过穿刺针锁紧器402夹持住穿刺针5,防止其掉落,同时通过第一驱动装置实现穿刺针5的穿刺功能;本实施例通过穿刺针导向器403实现穿刺针5移动过程的稳定性,以保证穿刺的精准度。
51.进一步的,第一驱动装置包括第一驱动电机410和第一驱动丝杆407,第一驱动丝杆407的轴向平行于穿刺针5的移动方向,穿刺针锁紧器402螺纹连接在第一驱动丝杆407上,第一驱动电机410与第一驱动丝杆407连接,第一驱动电机410驱动第一驱动丝杆407转动,第一驱动丝杆407转动从而带动穿刺针锁紧器402沿第一驱动丝杆407移动,穿刺针锁紧器402最终带动穿刺针移动。当然,在其他实施例中,第一驱动装置的实现方案并不局限于以上所述,可根据具体情况进行调整。
52.在本实施例中,穿刺执行机构4还包括用于限定穿刺针锁紧器402移动距离的限位组件。具体的,限位组件包括导向杆409、限位滑块408和第二驱动装置;导向杆409安装在壳体401上,且其轴向平行于穿刺针5的移动方向;穿刺针锁紧器403套设于导向杆409上,且穿刺针锁紧器402可沿导向杆409轴向移动;限位滑块408安装于导向杆409上,且限位滑块408可沿导向杆409轴向移动;第二驱动装置连接限位滑块408,用于驱动限位滑块408沿导向杆409移动。第一驱动装置驱动穿刺针5移动前,先启动第二驱动装置带动限位滑块408沿导向杆409移动至目标位置(具体根据穿刺针需要穿刺的深度来调整限位滑块408移动的目标位置)处,第一驱动装置再带动穿刺针锁紧器402沿导向杆移动,移动至刚好与限位滑块408相接触时,穿刺针锁紧器402停止移动,即穿刺进程达到预定深度后停止,从而保证了穿刺深度的精准度;同时,若穿刺过程中出现程序紊乱,限位滑块408也会有效的阻止其继续穿刺,限位滑块408充当了安全保险的作用。
53.进一步的,第二驱动装置包括第二驱动电机411和第二驱动丝杆406,第二驱动丝杆406的轴向平行于穿刺针5的移动方向,限位滑块408安装在第二驱动丝杆406上,第二驱动电机411连接第二驱动丝杆406的一端,用于驱动第二驱动丝杆406转动,从而带动限位滑块408沿第二驱动丝杆406移动。当然,在其他实施例中,第二驱动装置的实现方案并不局限于以上所述,可根据具体情况进行调整。
54.在本实施例中,穿刺针锁紧器402包括第一外壳4021,第一外壳4021上设置有两相对设置的第一锁紧片4023、第一锁紧片0244,以及用于驱动第一锁紧片4023、第一锁紧片4024打开或闭合的第一驱动组件。
55.进一步的,第一驱动组件包括驱动板4022和第一传动齿轮414,驱动板4022上设置有一圆弧形齿部40221、斜槽40222、斜槽40223,斜槽40222、斜槽40223布在所述圆弧形齿部40221的两侧,且斜槽40222、斜槽40223长度相同;第一锁紧片4023、第一锁紧片4024可移动的安装在第一外壳4021上,第一锁紧片4023、第一锁紧片4024朝向驱动板4022的一侧上设
置有凸部40241,第一锁紧片4023、第一锁紧片4024上的凸部分别伸进斜槽40222、斜槽40223内,并可沿斜槽40222、斜槽40223移动;第一传动齿轮414与圆弧形齿部40221啮合;第三驱动装置用于驱动第一传动齿轮414转动,通过圆弧形齿部40221带动驱动板4022移动,驱动板移动过程中,凸部沿着斜槽移动,从而带动第一锁紧片4023、第一锁紧片4024沿着第一外壳4021相对移动实现夹持或相背移动实现打开。
56.其中,第一锁紧片4023、第一锁紧片4024与第一外壳4021之间移动连接方式相同,以第一锁紧片4024为例来说明,第一锁紧片4024一侧上设置有滑槽结构40243,第一外壳4021上对用设置有滑轨结构,滑槽结构40243与滑轨结构配合实现可移动安装,当然在其他实施例中,也可不通过滑槽、滑槽的结构进行滑动连接,可根据具体情况进行调整,此处不做限制。
57.在本实施例中,穿刺针导向器403与穿刺针锁紧器402类似,穿刺针导向器403包括第二外壳4031,包括两相对设置的第二锁紧片4033、第二锁紧片4034,用于驱动两第二锁紧片4033、第二锁紧片4034打开或闭合的驱动组件的第二驱动组件。
58.进一步的,第二驱动组件包括驱动板4032和第二传动齿轮415,驱动板4032上同样具有一圆弧形齿部、两斜槽,两斜槽分布在圆弧形齿部的两侧,且两斜槽长度相同;第二锁紧片4033、第二锁紧片4034可移动的安装在第二外壳4031上,第二锁紧片4033、第二锁紧片4034朝向驱动板4022的一侧上设置有凸部,第二锁紧片4033、第二锁紧片4034上的凸部分别伸进两斜槽4内,并可沿斜槽移动;第二传动齿轮415与圆弧形齿部啮合;第三驱动装置用于驱动第二传动齿轮415转动,通过圆弧形齿部带动驱动板4032移动,驱动板移动过程中,凸部沿着斜槽移动,从而带动第二锁紧片4033、第二锁紧片4034沿着第二外壳4031相对移动实现夹持或相背移动实现打开。
59.其中,第二锁紧片4033、第二锁紧片4034与第二外壳4031之间移动连接方式相同,具体的在第二锁紧片4033、第二锁紧片4034一侧上设置有滑槽结构,第二外壳4031上设有匹配的滑轨结构,滑槽结构与滑轨结构配合实现可移动安装,当然在其他实施例中,也可不通过滑槽、滑槽的结构进行滑动连接,可根据具体情况进行调整,此处不做限制。
60.在本实施例中,穿刺针5的一端夹持在第一锁紧片4023、第一锁紧片4024之间,进一步的穿刺针的一端上固定套设有一导向套413,第一锁紧片4023、第一锁紧片4024夹持在导向套413上实现穿刺针5一端的固定夹持;穿刺针的另一端夹持在第二锁紧片4033、第二锁紧片4034之间,进一步的穿刺针5的另一端上套设有另一导向套404,且保证穿刺针5可相对于导向套404移动,第二锁紧片4033、第二锁紧片4034夹持在导向套404上实现穿刺针另一端的径向限位、轴向移动夹持。当然,在其他实施例中也可省略导向套413的设置,此处不做限制,可根据具体情况进行调整。
61.在本实施例中,穿刺针锁紧器402和穿刺针导向器403共用一个第三驱动装置,同步实现穿刺针锁紧器402和穿刺针导向器403上两锁片的打开或闭合;具体的,第三驱动装置包括驱动连杆412、第三驱动电机405,第一传动齿轮415和第二传动齿轮414轴向可移动的套设在驱动连杆412上,同时第一传动齿轮415和第二传动齿轮414相对于驱动连杆412周向转动(具体的可通过在驱动连杆412设置开槽、在第一传动齿轮415和第二传动齿轮414的安装孔内壁上设置伸进开槽内的卡件),驱动连杆412转动带动第一传动齿轮415和第二传动齿轮414同步转动;第三驱动电机405用于驱动驱动连杆412或第一传动齿轮415或第二传
动齿轮414转动。
62.进一步的,本实施例中第三驱动电机405通过传动组件实现对驱动驱动连杆412的传动连接;传动组件包括与第三驱动电机405输出端上的齿部啮合的小齿轮417,同轴固定在驱动连杆412上的大齿轮416,大齿轮416与小齿轮417啮合实现传动。当然,在其他实施例中也可省略传动组件的设置,第三驱动电机405与驱动连杆412传动连接,此处不做限制,可根据具体需要进行调整。
63.在本实施例中,机械臂3优选的采用六自由度机械臂,它由x移动,y移动,z移动,x转动,y转动,z转动六个自由度组成。当然在其他实施例中,机械臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等,可根据具体需要进行选择,此处不做限制。
64.在本实施例中,扫描装置2可直接采用ct扫描仪;当然,在其他实施例中也可选用其他扫描装置,此处不做限制。
65.在本实施例中,该精准自动穿刺系统还包括光学跟踪器7,与控制器连接,光学跟踪器7用于跟踪穿刺针。具体的,光学跟踪器7是用来跟踪穿刺执行机构上所安装的标记球,由于标记球和穿刺针一起固定在穿刺执行机构上,所以标记球和和穿刺针的相对位置就确定了,当光学跟踪器跟踪标记球的空间坐标的时候,进而就可以得到穿刺针的空间坐标.
66.在本实施例中,该精准自动穿刺系统还包括显示器6,与控制器1连接,用于显示1控制器获取的数据。
67.下面就本实用新型提供的精准自动穿刺系统的整个工作原理做进一步的说明:
68.1、穿刺操作前,控制器1通过扫描装置,对目标区域进行扫描,确定穿刺把心,同时控制器据此规划机械臂运动的路径下,机械臂启动将穿刺执行机构运送至指定区域。
69.2、穿刺锁紧器和穿刺导向器同时打开,放入穿刺针后,穿刺锁紧器和穿刺导向器同时闭合,分别夹紧穿刺针末端和穿刺前端的导向套上。
70.3、启动穿刺针,使其按照预设好的穿刺深度进行穿刺,穿刺深度完成后,电机停止,并同时释放穿刺锁紧器和穿刺导向器。穿刺针和穿刺执行机构分离,机械臂将穿刺执行机构移开,整个穿刺过程结束。
71.4、再对穿刺有穿刺针的目标处通过扫描装置进行扫描,确认穿刺针具体位置是否穿入指定靶点。
72.本技术领域的技术人员应理解,本实用新型可以以许多其他具体形式实现而不脱离其本身的精神或范围。尽管已描述了本实用新型的实施案例,应理解本实用新型不应限制为这些实施例,本技术领域的技术人员可如所附权利要求书界定的本实用新型的精神和范围之内作出变化和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1