一种混合八自由度下肢康复机器人的制作方法
1.本实用新型涉及康复器械控制技术领域,尤其涉及一种混合八自由度下肢康复机器人。
背景技术:
2.康复机器人作为医疗机器人的一个重要分支,它的研究贯穿了康复医学、生物力学、机械学、机械力学、电子学、材料学、计算机科学及机器人学等诸多领域,已经成为国内外机器人领域的一个研究热点。
技术实现要素:
3.针对上述现有技术的现状,本实用新型所要解决的技术问题在于提供一种结构简单,高效安全的,能够根据患者肌肉进行不同康复训练的混合八自由度下肢康复机器人;
4.本实用新型解决上述技术问题所采用的技术方案为:
5.一种混合八自由度下肢康复机器人,包括:控制系统、并联机构平台、患者躯干支撑平台、膝关节转动局部运动副以及踝关节转动局部运动副;
6.所述患者躯干支撑平台安装在并联机构平台上,所述膝关节转动局部运动副和踝关节转动局部运动副分别和并联机构平台串联连接;
7.所述并联机构平台用于预设虚拟训练场景的定位基准,所述并联机构平台为六自由度stewart平台;
8.所述膝关节转动局部运动副,用于实现带动脊髓损伤患者膝关节的转动;
9.所述踝关节转动局部运动副,用于实现带动脊髓损伤患者踝关节的转动。
10.进一步地,
11.六自由度stewart平台包括六个可伸缩的电动缸,所述六个可伸缩的电动缸并联连接;
12.膝关节转动局部运动副包括膝关节转动电动缸;
13.踝关节转动局部运动副包括踝关节转动电动缸。
14.进一步地,所述控制系统包括:上位监控计算机、伺服运动控制卡、伺服控制单元、位置检测设备以及数字量控制单元;
15.所述上位监控计算机,用于设定电动缸的运行参数以及获取电动缸当前的云状状态,并根据电动缸的运行状态绘制对应的曲线;
16.所述伺服运动控制卡,用于接收上位监控计算机设定的电动缸的运行参数,并接收伺服控制单元上传的电动缸的位移信息;
17.所述伺服控制单元,分别和六个可伸缩的电动缸、膝关节转动电动缸以及踝关节转动电动缸连接,用于获取电动缸的位移信息,将所述位移信息发送至伺服运动控制卡,接收伺服运动控制卡的电动缸的运行参数,并根据接收的电动缸的运行参数对应驱动所述电动缸运动;
18.所述位置检测设备,分别设置在每个电动缸的预设位置,用于跟踪电动缸;
19.所述数字量控制单元,用于显示当前状态以及控制机器人电源的通断。
20.进一步地,所述伺服控制单元,包括八个伺服驱动器,所述八个交流伺服电机分别和六自由度stewart平台对应的六个可伸缩的电动缸以及膝关节转动电动缸和踝关节转动电动缸连接;
21.所述伺服驱动器,用于分别驱动对应的电动缸。
22.进一步地,所述伺服驱动器包括交流伺服电机、光电编码器以及限位传感器;
23.所述交流伺服电机,用于驱动电动缸运行;
24.所述光电编码器,用于获取电动缸运行的位移;
25.所述限位传感器,用于获取电动缸运行至预设限制位置时的限位信号,并将获取的限位信号通过伺服控制单元发送至上位监控计算机。
26.进一步地,所述位置检测设备为激光跟踪仪。
27.进一步地,所述数字量控制单元包括:
28.使能开关,用于控制下肢康复机器人的开和关;
29.状态指示器,用于指示当前下肢康复机器人的状态;
30.急停开关,用于控制下肢康复机器人急停。
31.本实用新型至少包括以下有益效果:
32.(1)机器人运动上设计为混合八自由度,即六自由度并联平台和膝关节转动局部运动副以及踝关节转动局部运动副;机器人结构上设计为适应多种坐姿和不同身材的患者,能适应多种不同肌群联合激励训练;
33.(2)对于非常虚弱的人放置为半躺姿势,如坐平衡能力受损者,以便得到康复训练。为此,座椅靠背、扶手设计为可折叠方式;这种设计在一定程度上扩大了用户群和适应症;
34.(3)针对九组肌肉群:躯干肌、腹直肌、竖脊肌、股二头肌、胫骨前肌、内侧腓肠肌、下肢肌、阔筋膜张肌、股直肌、设计康复方案和机器人运动动作,其中前六组由六自由度并联平台负责康复训练,后三组由其他二自由度负责;
35.(4)六自由度平台在求解时采用了并行求解的方法,便于实时控制的实现。
附图说明
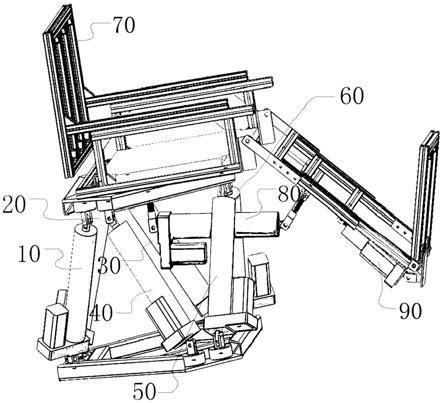
36.图1为混合八自由度下肢康复机器人示意图;
37.图2为混合八自由度下肢康复机器人结构示意图;
38.图3为六自由度stewart平台原理图;
39.图4为下肢康复机器人逆运动学并行处理结构示意;
40.图5为下肢康复机器人控制系统体系结构;
41.图6为下肢康复机器人软件功能框图与数据流程。
42.其中,第一电动缸10、第二电动缸20、第三电动缸30、第四电动缸40、第五电动缸50、第六电动缸60;患者躯干支撑平台70、膝关节转动局部运动副80;踝关节转动局部运动副90。
具体实施方式
43.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
44.实施例
45.本实施例提供了一种混合八自由度下肢康复机器人,如图1至图6所示,本混合八自由度下肢康复机器人包括:
46.控制系统、并联机构平台、患者躯干支撑平台、膝关节转动局部运动副以及踝关节转动局部运动副;
47.所述患者躯干支撑平台安装在并联机构平台上,所述膝关节转动局部运动副和踝关节转动局部运动副分别和并联机构平台串联连接;
48.所述并联机构平台用于预设虚拟训练场景的定位基准,所述并联机构平台为六自由度stewart平台;
49.所述膝关节转动局部运动副,用于实现带动脊髓损伤患者膝关节的转动;
50.所述踝关节转动局部运动副,用于实现带动脊髓损伤患者踝关节的转动。
51.混合八自由度下肢康复机器人是为了更好的对脊髓损伤患者进行康复训练而开发的康复训练装置,通过下肢康复机器人各种训练,不仅使患者下肢肌肉得到锻炼,增加下肢肌肉的力量,防止出现肌肉萎缩,而且能够增加关节活性。
52.最主要目的是为日后患者进行主动、有意识的主动康复训练提供支持。
53.针对不同病情的患者,采用不同的康复训练策略和训练强度进行康复训练,并针对每一位患者保存相关训练数据。
54.本混合八自由度下肢康复机器人,不仅能单独训练某一个关节,而且也能够同时训练多个关节,能满足不同患者、不同康复治疗时期的多种需求。当患者坐在混合八自由度康复机器人上后,用松紧带把人体下肢大腿、小腿、脚、胸部分别和康复机器人绑在一起,康复机器人就可以带动人体下肢进行各种康复训练。
55.其中混合八自由度下肢康复机器人的控制系统启动前,患者坐于混合八自由度下肢康复机器人的患者躯干支撑平台上,所述患者躯干支撑平台可以为座椅;
56.座椅通过平移(前后、左右、上下)运动、旋转((横滚、俯仰、偏航)、运动和膝盖与踝关节的旋转运动对患者肌肉组进行单一或组合运动实现康复训练,运动的控制与实现依赖于六自由度stewart平台的反解
57.其中六自由度stewart平台包括六个可伸缩的电动缸,所述六个可伸缩的电动缸并联连接;
58.膝关节转动局部运动副包括膝关节转动电动缸;
59.踝关节转动局部运动副包括踝关节转动电动缸。
60.具体的,如图1所示,其中患者躯干支撑平台安装在并联机构平台上;
61.其中o-xyz为全局坐标系,用于机构设计和虚拟训练场景基准定位。
62.stewart平台的六个自由度包括:
63.绕局部坐标系o1‑
x1y1z1中x1轴的转动(转角α);
64.绕y1轴的转动(转角β);
65.绕z1轴的转动(转角γ);
66.沿x1轴的移动(位移x0);
67.沿y1轴的移动(位移y0);
68.沿z1轴的移动(位移z0);
69.绕局部坐标系o1′‑
x1′
y1′
z1′
坐标轴x1′
的转动(转角α
′
)和绕局部坐标系o1″‑
x1″
y1″
z1″
坐标轴x1″
的转动(转角α
″
),实现膝关节和踝关节转动;
70.两个局部运动副与空间并联机构平台之间为串联关系。
71.通过控制康复机器人各运动部件在不同康复训练模式下的运动范围、速度和加速度,可以带动患者进行躯干以及下肢肌的针对性康复训练运动。
72.脊髓损伤患者损伤平面以下的躯干肌与下肢肌均受累。从医学角度分析脊髓损伤患者受累肌肉部位、肌肉实现的运动、康复机器人针对性训练动作设计如表1所示,根据表1来指定单点刺激或多点刺激的多模式动觉康复医疗方案。
73.表1康复机器人运动与肌肉群训练功能表
[0074][0075][0076]
其中stewart平台会根据上述表格对患者进行反向运动进行实时求解;
[0077]
如图3所示,六自由度stewart平台的结构框图,其中利用6个能够伸缩的六个电动缸并联连接组成,第一电动缸10、第二电动缸20、第三电动缸30、第四电动缸40、第五电动缸50、第六电动缸60;六个电动缸的伸缩运动组成了上平台在空间六自由度的运动。于是,可以得到上下平台各相应铰点p
i
、b
i
之间的距离如式(1):
[0078][0079]
其中
[0080]
将所有铰点坐标代入式(1)后,可知l
i
是活动平台位姿参数q=(x
p
,y
p
,z
p
,α,β,γ)
t
的函数,即
[0081]
l
i
=f
i
(q)i=1,2,
…
,6
ꢀꢀꢀ
(2)
[0082]
上式是6个独立的显式方程,当已知机构的基本尺寸和上平台的位置和姿势后,就可以利用上式求出6个驱动器的位移。因此,可以利用六个并行的处理器,分别计算六个支撑杆的杆长,从而降低运算量和运算时间t。对于六自由度stewart的速度反解表达式,如下(3):
[0083][0084]
加速度反解表达式,如式(4):
[0085][0086]
可以看出对于6自由度stewart平台的位置、速度和加速度反解表达式,均为六个独立的显式表达式,当已知机构的基本尺寸和上平台的位置和姿势后,就可以利用这些表达式求出6个驱动器的位移l、速度v和加速度w。因而,由并联机器人这种本质的并行特性,可以很容易的利用多处理器并行处理的方法处理并联机器人的逆运动学问题。
[0087]
进一步地,所述控制系统包括:上位监控计算机、伺服运动控制卡、伺服控制单元、位置检测设备以及数字量控制单元;
[0088]
所述上位监控计算机,用于设定电动缸的运行参数以及获取电动缸当前的云状状态,并根据电动缸的运行状态绘制对应的曲线;
[0089]
上位监控计算机作为人机接口,设定运行参数、监控系统运行状态、绘制状态曲线;同时利用它的计算能力进行信息融合与协调,提供与外设的接口等。
[0090]
所述伺服运动控制卡,用于接收上位监控计算机设定的电动缸的运行参数,并接收伺服控制单元上传的电动缸的位移信息;
[0091]
伺服运动控制卡是控制系统的核心,主要作用是根据上位机下达的指令对光电编码器上传的位移信息进行处理,实现stewart平台的实时闭环控制,并通过tcp/ip接口实时向上位机提供运行参数。采用美国delta tau公司turbo pmac clipper运动控制卡,具有浮点dsp处理器,运行速度快、运算能力强,同时提供开放的软件开发平台,可以自主编写复杂的控制算法。
[0092]
所述伺服控制单元,分别和六个可伸缩的电动缸、膝关节转动电动缸以及踝关节转动电动缸连接,用于获取电动缸的位移信息,将所述位移信息发送至伺服运动控制卡,接收伺服运动控制卡的电动缸的运行参数,并根据接收的电动缸的运行参数对应驱动所述电
动缸运动;
[0093]
所述位置检测设备,分别设置在每个电动缸的预设位置,用于跟踪电动缸;
[0094]
所述数字量控制单元,用于显示当前状态以及控制机器人电源的通断。
[0095]
进一步地,所述伺服控制单元,包括八个伺服驱动器,所述八个交流伺服电机分别和六自由度stewart平台对应的六个可伸缩的电动缸以及膝关节转动电动缸和踝关节转动电动缸连接;
[0096]
所述伺服驱动器,用于分别驱动对应的电动缸。
[0097]
进一步地,所述伺服驱动器包括交流伺服电机、光电编码器以及限位传感器;
[0098]
所述交流伺服电机,用于驱动电动缸运行;
[0099]
交流伺服电机是机器人平台的驱动部件,驱动器和伺服电机构成了控制系统最内层的电流伺服控制环。采用日本panasonic生产的msma082a1c伺服电机及其配套的msma083a3型小惯量系列驱动器,并且选择与电机、驱动器技术规格匹配的增量式编码器,2500p/r,11线。控制系统软件采用主从结构,系统软件开发包括上位机程序和下位机程序,如图6所示。
[0100]
所述光电编码器,用于获取电动缸运行的位移;
[0101]
所述限位传感器,用于获取电动缸运行至预设限制位置时的限位信号,并将获取的限位信号通过伺服控制单元发送至上位监控计算机。
[0102]
进一步地,所述位置检测设备为激光跟踪仪。
[0103]
进一步地,所述数字量控制单元包括:
[0104]
使能开关,用于控制下肢康复机器人的开和关;
[0105]
状态指示器,用于指示当前下肢康复机器人的状态;
[0106]
急停开关,用于控制下肢康复机器人急停。
[0107]
如图6所示,上位机即上位监控计算机主要完成图形显示、运动参数设定、运动学逆解、数据存储及数据通信等功能。
[0108]
下位机即伺服运动控制卡采用clipper运动控制卡,主要完成数据采集、变加速度轨迹生成、复杂控制算法实现、数据通信等功能。
[0109]
数据采集模块采集光电编码器信号、限位信号及驱动器状态信息等,同时完成异常情况的处理工作。
[0110]
操作人员可以在设定运行参数的界面内输入参数(动平台最大速度,角速度,加速度、角加速度和末端的期望位移),观察并联机器人的运行状态。
[0111]
运动学逆解模块对该命令进行解释(求出驱动电机的旋转角度),然后由数据通信模块将解释后的数据送入下位机;下位机获得命令后调用轨迹生成模块,产生期望的位移,控制策略模块根据期望的位移及数据采集模块的实际位移信息进行运算,并输出控制电压给伺服电机驱动器实施闭环控制,同时数据采集模块将实时状态信息送入数据存储区域;上位机将获得的实时数据送入图形显示模块,便于操作人员进行监控。
[0112]
本本混合八自由度下肢康复机器人在下肢康复训练能够实现对应肌肉组的选取,并能实现下肢康复机器人运动与肌肉组的对应,并能实现六自由度stewart平台正反向运动学的实时求解与控制。
[0113]
本实用新型在设定好程序后,能够替代康复护理人员的重复工作,实现脊髓损伤
患者休克期后的早期康复治疗,有利于静息神经元的再生与肌肉重塑,同时降低了对于康复护理人员的依赖,节省了人力,具有很高的社会效益。
[0114]
本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1