用于晶状体手术的设备和方法与流程
1.本发明涉及一种用于对人眼进行晶状体手术的设备和方法,其中,使用晶状体内人工晶状体,尤其是用于屈光晶状体手术,例如白内障手术。
背景技术:
2.植入人工晶状体是治疗白内障的常规治疗方法。在此过程中,移除已被白内障混浊的眼晶状体并由可植入的人工晶状体代替。然而,由于其他原因,也可能需要植入人工晶状体。近来已经实现了能够实现老花眼矫正和/或散光矫正的光学概念。因此,白内障手术经历了从传统的老年手术向屈光手术的转变,目的是在所有观看距离上实现免戴眼镜,并具有非常高的视觉质量。绝大多数人工晶状体植入在囊袋的剩余的空余部分中。为此,通过撕囊打开前囊袋膜,粉碎并取出天然的眼晶状体,将后房型人工晶状体植入剩余的囊袋中。为了产生所需的去除部,近年来开发了短脉冲激光器,特别是飞秒短脉冲激光器,以产生撕囊并实现眼睛前侧的进入去除部和/或基于激光并因此“没有刀片”地在打开的囊袋中粉碎眼晶状体。
3.用于植入囊袋中的所谓后房型人工晶状体包括被称为“触觉部”的保持装置,保持装置被固定到人工晶状体的实际晶状体主体上,以便将人工晶状体正确地固定和定位在囊袋中。植入人工晶状体的其他选项包括固定到虹膜。为此使用了所谓的前房型人工晶状体。
4.关于已知的人工晶状体,参考以下文献:us 4242761、de 2605847 a1、us 4244060、us 2008/183289、de 2725219 a1、us 4166293、us 4177526 a、de2945349 a1、us 4268921 a、de 3130278 a1、us 2002/128710 a、de 10105080 b4、de 10134072 b4、us 5728155 a、us 2007/010881 a、wo 99/56670 a1、wo 00/21467 a1、us 2013/190868 a、us 6007579 a、us 20 158560 a、us 2002/143394 a、us 2007/244561 a、us 2010/204787 a、wo 2012/054854 a2、ep 1667612 a1、us 5443506 a、us 5066301、au 2004/02852 a1、wo 2008/077795 a2、us 9095424 b2、wo 2017/096087 a1和ca 3002085 a1。
5.因此,现有技术公开了单件式和多件式人工晶状体。
6.wo 2019/048708 a1中提到了一种特殊形式的人工晶状体,具体来说是晶状体内人工晶状体。其区别在于该人工晶状体被固定在眼晶状体的残留物上。在这种情况下,人工晶状体通过未进一步详细描述的飞秒激光装置进行处理,从而在眼晶状体的中心区域中产生为人工晶状体提供空间的通孔。只有囊袋保留在通孔的后面。相比之下,眼晶状体已从通孔中完全移除。在其外边缘处,在眼晶状体中产生的容纳空间具有外围紧固区域,该外围紧固区域包括多个轴向间隔开的环形凹槽。人工晶状体以这样的方式植入,使得人工晶状体的触觉部接合在其中一个环形凹槽中。由于存在轴向间隔开的环形凹槽,外科医生能够从各种可能性中沿眼轴选择相对位置。
7.ep 3375410 a1和us 2019/0290487 a1公开了通过飞秒短脉冲激光辐射挖空天然的眼晶状体的内部然后用合成晶状体材料填充所述内部的做法。de 102006036800 a1描述了关于超短脉冲激光装置的细节,该装置同样通过飞秒激光辐射挖空眼晶状体,使得所产
生的空腔可以填充凝胶材料。这样,眼晶状体的混浊部分可以被移除,目的也是为了恢复容纳能力。因此,用液体凝胶进行填充,该液体凝胶周围被天然眼晶状体的残余组织包围,而不是用具有尺寸稳定的晶状体主体的晶状体内人工晶状体进行。
8.在人眼中,晶状体将前房与玻璃体液隔开。玻璃体液脱垂的风险、即玻璃体液移位进入前房,是晶状体手术中的一个问题。因此,传统的人工晶状体具有相对稳定的触觉部,触觉部以臂的形式设置在人工晶状体的边缘上,并确保所植入的人工晶状体能够最大程度地承受玻璃体液的位移或使其不可能发生位移。
9.人工晶状体的定位和设计对于手术干预的成功至关重要。对于足够大的患者群体,平均屈光结果可以通过对人工晶状体的常数(也就是说,人工晶状体的光学形式)的统计优化来调节。然而,植入过程中最大的挑战是屈光结果在个别情况下(也就是说对于个别患者)的唯一有限可预测性。预测的困难主要来自固定的术后前房深度和人工晶状体的中心和倾斜的有限可预测性。倾斜是由于触觉部,特别是连接到晶状体主体并与之对齐的触觉部。尽管可以尝试通过关联多个生物测量参数和统计适应来尽可能准确地预测晶状体座,但是这样的假设不一定适用于具有个体解剖特征和个体愈合过程的个体患者。如果植入用于矫正散光的复曲面人工晶状体,则附加地各向异性轴的对准具有进一步且因此可能受误差影响的自由度。在这种情况下,由于生物测量中的测量误差、手术干预过程中的对准不准确、生产误差等原因,可能会出现偏差,因此可能会出现屈光不正和不满意的患者。前述wo 2019/048708 a1试图通过产生前述多个轴向间隔开的用于接纳晶状体内人工晶状体的触觉部的凹槽来纠正这些问题。这样,外科医生可以在介入期间或在第二介入中通过将触觉部从一个凹槽移动到另一个凹槽来改变人工晶状体的相对轴向位置。此外,该文献提出使用多个凹槽来植入多个人工晶状体。
技术实现要素:
10.本发明的任务是改善通过使用透镜状/晶状体内人工晶状体来进行的屈光眼手术的设备和方法,特别是在人工晶状体的更精确和稳定的定位方面。
11.本发明在独立权利要求中限定。从属权利要求涉及优选的改进方案。
12.一种用于在人眼上进行晶状体手术、特别是进行屈光晶状体手术的设备,包括用于分离在脉冲激光辐射的焦点处的眼晶状体和囊袋的组织的激光装置。激光装置发射脉冲激光辐射并将其聚焦到眼睛中。在这种情况下,脉冲激光辐射和聚焦被设计成使眼晶状体和囊袋的组织分离。此外,提供了用于设置和调节焦点的位置的焦点定位装置。结果,该设备可以通过调节焦点的位置来形成切面。配准装置设置在该设备中并且形成为使焦点的所在地的位置相对于眼睛结构的位置进行参照,所述眼睛结构包括眼晶状体和囊袋。借助于所述配准装置,所述设备知晓焦点相对于眼睛结构位于什么位置。该设备的控制装置从配准装置读取数据并控制焦点定位装置。在这种情况下,以这样的方式配置,使得控制装置为焦点定位装置指定用于焦点位置的图案,所述图案形成一定的切面。在眼晶状体中,切面分离用于产生用于晶状体内人工晶状体的容纳空间的组织层。在实施例中,容纳空间具有用于人工晶状体的晶状体主体的去除部并且在实施方式中朝向前房敞开。此外,容纳空间实现以下特征中的至少一个,也就是说,容纳空间可以体现为不同的变型:在变型a中,容纳空间包括用于将晶状体主体固定在单个预定轴向位置上的外围紧固区域。在变型b中,容纳空
间包括用于固定晶状体主体的紧固区域,容纳空间和紧固区域被设计成以密封方式接纳人工晶状体,从而以密封方式将眼睛的前房与眼睛的后部分开。在变型c中,眼晶状体组织的连续后层保留在为晶状体主体提供的去除部的后面。
13.一种用于规划人眼晶状体手术的设备包括输入接口,输入接口用于输入测量数据,该测量数据指示眼睛结构的位置,所述眼睛结构包括眼晶状体和囊袋。此外,该设备包括计算机装置,计算机装置用于限定眼晶状体中的切面和用于确定脉冲激光辐射的焦点的所在地的图案,这些所在地位于限定的切面上。此外,该设备包括输出接口,输出接口用于输出表示所述所在地的图案的数据,来自设备的脉冲激光辐射应该据其发射。因此,数据被输出到发射脉冲激光辐射的设备。计算机装置以已经解释过的用于进行晶状体手术的设备的方式限定接口。特别是在变型a至b中的一个或多个中,切面分离眼晶状体中的组织层以产生具有上述特性的容纳空间。
14.一种准备人眼晶状体手术、特别是屈光晶状体手术的方法,包括多个步骤:收集指示眼睛结构的位置的测量数据中的位置,所述眼睛结构包括眼晶状体和囊袋;限定眼晶状体中的切面并确定脉冲激光辐射的焦点的所在地的图案,这些所在地位于所限定的切面上;并且为发射脉冲激光辐射的设备生成用于表示所述所在地的图案的数据。切面将眼晶状体中的组织层分开,以便产生具有上述设备的特性的容纳空间,特别是具有变型a至c中的一个或多个变型的特征。
15.一种用于人眼晶状体手术的方法,包括:提供晶状体内人工晶状体,所述人工晶状体包括晶状体主体;在眼晶状体中产生切面,切面分离眼晶状体中的组织层以产生具有上述特性的容纳空间;并移除由切面界定的体积。可选地,该方法还包括将人工晶状体植入到容纳空间中。
16.用于进行晶状体手术的设备的变型a至c、用于规划晶状体手术的设备和用于准备晶状体手术或进行晶状体手术的方法具有许多优点。最重要的优点之一是晶状体主体的轴向位置由每个变型本身或由变型的任意组合精确地限定,并且不受玻璃体/玻璃体液的影响。特别是,不需要特殊的触觉部(haptiken),该触觉部支撑晶状体主体以防止可能的玻璃体液脱垂。晶状体主体的轴向位置由容纳空间精确限定,因此最终由所限定的切面限定。在操作之前,限定切面以便将容纳空间轴向地(当然也横向地)放置到期望的光学校正所需的精确位置。因此,对所述设备的进一步的改进是优选的,其中还存在测量装置,所述测量装置测量眼睛,使得容纳空间的限定可从测量数据中导出。类似地,在该方法中使用了这种测量装置。在干预期间不必直接使用测量装置,而是,测量装置也可以作为独立设备保留,以便在手术干预之前进行测量。为了能够确保切面能够在根据测量限定的位置、形状和尺寸方面的准确位置,提供配准装置。其将所述所在地(在所述所在地上通过脉冲激光辐射产生切面)的位置相对于眼睛结构的位置进行参照,所述眼睛结构包括眼晶状体和囊袋。这种参考使得对眼睛的测量在时间、空间和设备方面独立于手术干预本身。特别地,不再需要使用光学装置将测量装置的测量光束与脉冲激光辐射的处理光束配准,如现有技术中迄今为止在其它方式中提供的那样。例如,到目前为止,在现有技术中,这两个光束一直通过相同的扫描仪和相同的透镜被引导。由于现在参考眼睛结构的位置,不再需要测量装置和治疗装置的光学耦合。而是,如果测量装置使光学眼睛结构位置(其也被配准装置捕获)在测量数据中是可识别的,这就足够进行对眼睛结构的参考。可能的结构包括虹膜、眼睛前侧结构或
后房中的结构或眼晶状体结构或囊袋结构,或与这些结构连接的组织结构。当然,仍然可以使用单个装置进行所述测量和配准,前提是该装置满足测量装置的要求,并且该装置集成到用于进行晶状体手术的设备中。然而,为此优选使用两种不同的设备,因为仅用于配准的设备可以具有更简单的设计。
17.因此,与wo 2019/048708 a1不同的是,在变型中不再提供将人工晶状体的触觉部接合在其中的多个环形槽。取而代之的是,外围紧固区域仍然仅提供单个轴向位置并且通常固定尺寸稳定的晶状体主体。因此避免了由于触觉部导致的不准确。更确切地说,外围紧固区域直接固定尺寸稳定的晶状体主体的单个轴向位置保证了尺寸稳定的晶状体主体以及人工晶状体的固定且不变的轴向对准。因此,该方法避免了轴向变化,这种轴向变化对于现有技术中的个体患者来说是不可避免的,或者在wo 2019/048708 a1中旨在通过提供多个轴向间隔开的附接凹槽来补偿。从而实现对人工晶状体的尺寸稳定的晶状体主体进行更精确的对准。
18.根据变型b实现的晶状体内的固定的实施例的主要优点在于,容纳空间被设计成使得人工晶状体、特别是其尺寸稳定的晶状体主体与眼晶状体的剩余组织一起相对于位于囊袋前面的部分紧密地界定前房。
19.由于眼晶状体和囊袋的位置由测量装置精确地收集,特别是如果测量装置包括oct,则所述轴向位置和因此容纳空间的设计以及如果存在的话外围紧固区域可以是针对单独患者地精确地预先确定。因此,焦点所在地的图案(其最终限定外围紧固区域的切面)应该由控制装置或在方法中以针对单独患者的方式限定。
20.根据变型c,眼晶状体组织的连续后层保留在用于晶状体主体的去除部的后面。这种配置的第一个优点是可以更精确地确定眼晶状体的相对轴向位置,因为为人工晶状体保留了实际上的背面止动部。其次,保持前房和后眼部分之间的自然分离,并且排除了玻璃体/玻璃体液脱垂,而不需要为此目的的触觉部。
21.此外,这大大降低了所谓的继发性白内障的风险。在后囊袋之前的眼晶状体被移除的情况下,如果由于沉积物而在剩余的后囊袋中出现混浊,则可能会出现这种二次白内障。如果容纳空间以这样的方式形成,使得后囊袋也通过图案敞开并因此可以被移除,则同样可以降低继发性白内障的风险。
22.变型a至c中的一个变型的特别优选的配置规定,眼晶状体的前层组织仅留在容纳空间之前的外围眼晶状体区域中,使得用于尺寸稳定的晶状体主体的去除部朝向这个外围眼晶状体区域内的前房敞开。特别地,然后可以将容纳空间设计为用于仅由尺寸稳定的晶状体主体构成的人工晶状体的前部开口袋。然后,沿轴向考虑,外围紧固区域为向外逐渐变细的底切的形式。
23.此外,提供了一种人工晶状体,其主体整体形成为晶状体主体,其环形外边缘植入根据变型a或b的紧固区域中。晶状体主体和/或边缘以密封方式接触容纳空间的内侧。例如,将边缘植入底切以整体固定人工晶状体。因此,人工晶状体上不再有专门的紧固部分,一是实现了简单的紧固,二是实现了围绕光轴的较大的有效光学区域。例如,人工晶状体没有触觉部。
24.在另一优选配置中,晶状体内人工晶状体完全被晶状体后植入物的剩余组织包围。为此,眼晶状体的组织层不仅保留在去除部的后面,而且保留在去除部的前面,因此,除
了通向容纳空间并穿透眼晶状体组织和囊袋组织的进入去除部之外,所述组织层是连续的。首先,通过该进入去除部从眼晶状体内部移除容纳空间的材料。其次,将人工晶状体的晶状体主体材料通过进入去除部注入容纳空间。晶状体材料通过聚合固化。这样,由于晶状体内人工晶状体在植入状态下周围被眼晶状体的剩余组织包围,因此人工晶状体的空间固定特别精确且不变。
25.如开头已经提到的,人工晶状体在没有传统的触觉部的情况下被固定,也就是说没有传统的臂。因此,对于所有变型而言,形成用于卡锁紧固的外围紧固区域是特别优选的。这通常使人工晶状体在第一位置被引入紧固区域,然后围绕光轴或与光轴基本平行的轴旋转一定的角度值,使得卡锁式突起旋转到在紧固区域中的相应容纳部。在卡锁技术的范围内,外围紧固区域不具有旋转对称的形式,而是具有用于植入设置在人工晶状体上的卡锁的部分和卡锁闩锁在其中的部分。从一个部分到另一部分的过渡通过人工晶状体围绕其光轴或与其大致平行的轴的旋转来实现。在此上下文中,术语“基本上平行”表示人工晶状体相对于眼睛的光轴或眼睛的视轴的可能期望的倾斜。倾斜可以是
±
10
°
的量级。
26.替代地或附加地,外围紧固区域可以形成有螺纹结构,用于旋入人工晶状体中,该人工晶状体在人工晶状体的尺寸稳定的晶状体主体的边缘上设置有对应的互补螺纹结构。
27.优选地,外围紧固区域形成有与卡锁区域相邻的肩部,例如,人工晶状体的尺寸稳定的晶状体主体接触所述肩部以确保精确对准。特别优选地,该肩部是锥形的并且被设计用于与尺寸稳定的晶状体主体的对应的反锥形边缘接触。以这种方式,特别是人工晶状体的晶状体主体的轴向位置被非常精确地限定。
28.就以下描述用于折射透镜校正的设备的方面而言,这些方面自然同样适用于用于折射透镜校正的方法,反之亦然。此外,在本发明的范围内提供了人工晶状体的适当实施例,所述人工晶状体具有适合外围紧固区域或晶状体内人工晶状体固定的实施例的相应结构的设计。实际上,它们代表形成在眼晶状体组织之上或之中的眼内晶状体的紧固区域或固定部的对应物。此外,a到c的变型也可以组合,即实现为a+b、a+c、b+c、a+b+c。
29.应当理解,在不脱离本发明的范围的情况下,上述特征和下面还要解释的特征不仅可以以指定的组合使用,而且可以以其他组合或单独使用。
附图说明
30.下面将参考附图基于示例性实施例更详细地解释本发明,这些附图同样公开了对本发明来说重要的特征。这些示例性实施例仅是说明性的并且不应被解释为限制性的。例如,对具有多个元件或部件的示例性实施例的描述不应被解释为意味着所有这些元件或部件都是具体实施所必需的。相反,其他示例性实施例还可以包含替代元件和部件、更少的元件或部件、或附加的元件或部件。除非另有说明,不同示例性实施例的元件或部件可以彼此组合。针对示例性实施例之一描述的修改和变型也可以适用于其他示例性实施例。为了避免重复,不同图中相同的元件或对应的元件用相同的附图标记表示并且不再重复说明。其中:
31.图1至图12示出各种实施例中穿过示意性地表示的眼睛的截面图,该眼睛具有透镜状的/晶状体内的人工晶状体/眼内透镜(intraokularlinse),
32.图13示出眼晶状体的截面图和四个平面图,所述眼晶状体中以卡锁技术植入了人
工晶状体,
33.图14示出用于实现以卡锁技术植入的人工晶状体的四种不同的选项以及具有用于紧固在眼晶状体中的螺纹结构的人工晶状体,
34.图15示出用于处理眼晶状体的设备的示意图,
35.图16示出了在焦点位置上的用于生成切面的图案的示意图,以及
36.图17示出了用于规划对人眼晶状体进行的外科操作的装置的示意图。
具体实施方式
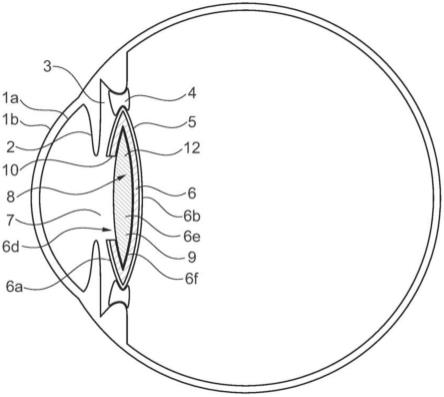
37.图1示意性地示出穿过眼睛的截面图,其中人工晶状体植入在眼晶状体的剩余物中。图1的附图标记同样用于其它附图中结构相同或功能相同的部件。
38.眼睛包括角膜,角膜具有面向眼睛的前房7的后侧1a和前侧1b。前房7由虹膜2界定,虹膜2在后房区域具有沟3。带状纤维4将囊袋5与剩余的眼球连接起来。眼晶状体6位于囊袋5中,囊袋包括前囊膜6a和后囊膜6b。瞳孔7由虹膜2界定,众所周知,眼球末端有视网膜。在以下描述的实施方式中,人工晶状体9已植入眼晶状体6中,为此目的,通过激光加工设备(下面将基于图15更详细地解释该激光加工设备)在眼晶状体6中产生切面8,所述切面围绕被移除的材料。这被实施为,使得眼晶状体6为人工晶状体9提供容纳空间6d。容纳空间6d具有用于人工晶状体9的晶状体主体的去除部6e和位于去除部外围的紧固区域6f。
39.由切面8包围的材料对应于图1中的那些缺失了晶状体(其由宽阴影的晶状体主体和画成双线的囊袋组成)的位置。在图1中,这是容纳空间6d,容纳空间由其中已经形成去除部6e的容积和位于前侧的开口通道组成。如以下仍将解释的,切面8是通过激光辐射产生的。切面围绕随后被移除的材料,以便因此产生容纳空间6d。在这种情况下,切面8限定了容纳空间6d的内表面,从而对用于产生切面8的激光束的引导决定了容纳空间6d的几何形状和相对位置。容纳空间6d的尺寸又被确定为使得其将人工晶状体9保持在预定且不变的轴向(以及横向)位置,并且,如下文将更详细解释的,将人工晶状体9相对于视轴保持在期望的角位置。换句话说,切面8的限定适应于患者的特定要求和待植入的人工晶状体9。
40.在图1的实施例中,切面8被设计和实现为,使得容纳空间6d是透镜状的并且人工晶状体9仅由尺寸稳定的晶状体主体9a组成,晶状体主体9a以密封方式锚定在实现为底切12的紧固区域6f中。在这种情况下,容纳空间6d在瞳孔7的区域中包括开口,所述开口既前囊膜6a中也在位于其下方的眼晶状体6中。两个组织仅在前部区域以环形方式竖立,从而形成一个袋。
41.图2中的实施例基本上对应于图1中的实施例,但是在这种情况下去除部6e不是设计为凹陷而是设计为眼晶状体6中的中心通道,因为人工晶状体9后面的眼晶状体组织11也被移除。因此,眼晶状体6仅在两个环形区域中被保留,具体而言是前部(10)和后部(6c),并由此形成用于眼晶状体9的固定袋。在所示实施例中前囊膜6b得以保留。这是可选的。前囊膜同样可以被移除。在这种情况下也提供密封。
42.图3示出了图1中的实施方式的修改方案。在这种情况下,人工晶状体9包括晶状体主体9a,晶状体主体9a在外围终止于卡锁机构。在眼晶状体6中,除了用于尺寸稳定的晶状体主体9a的去除部之外,还形成有直接相邻的、配合于人工晶状体9的卡锁机构13的外围紧固区域6f。后者将在下文基于图13和图14被更详细地解释。图4对应于图2的呈现,但针对的
是图3的卡锁机构。在图4中也可选的是让囊袋6b直立/留存。
43.图5阐明了将人工晶状体9和尺寸稳定的晶状体主体9a这样(即晶状体主体9a直接邻接眼晶状体的剩余组织6c)固定的优点。由于仅设置了一个外围紧固区域(在这种情况下,为了容纳卡锁机构13),还可以将眼晶状体设置成倾斜一定的角度25,从而实现个性化的对准。
44.图6示出了与图1类似的实施方式,但是此时剩余的眼晶状体组织6c包括螺纹结构17(gewindestruktur),人工晶状体9的相应配合的螺纹结构旋入螺纹结构17中。留在眼晶状体6后方的剩余厚度确保了,在将人工晶状体9拧入螺纹结构17时,人工晶状体9的相对轴向位置被精确地指定。图7的实施方式中没有设置该止动部,这使得外科医生在设置该仅由具有螺纹结构的晶状体主体9a构成的人工晶状体的轴向位置时能够具有更大的自由度。方便地,人工晶状体然后通过粘合剂固定在螺纹结构17的区域中。
45.图8示出了与图4和图5中的实施方式类似的实施方式。然而,在这种情况下,人工晶状体9在晶状体主体9a的边缘处附加地设置有锥形边缘,所述锥形边缘在向后方向上、即朝向视网膜8逐渐变细。眼晶状体6的剩余组织6c形成有相应的锥形边缘18作为肩部,其在以卡锁技术植入眼晶状体时精确地限定晶状体主体9a的轴向位置。图9中的结构与此不同之处仅在于囊袋,即囊膜,也在晶状体主体9a的后面被移除,即露出后晶状体表面9b。尽管如此,这里也存在上述密封(abdichtung)。
46.图10和图11阐明了晶状体主体9a也可以以这样的方式实现,即其在前侧形成前囊膜的平滑延续。因此,在对前房的分界面上不会出现拐角,这从生物学的角度来看可能是有利的。自然地,这种实现方式既可以用未敞开的前囊袋6b(图10)来实现,也可以用敞开的前囊袋和晶状体主体9a的相应露出的背面(图11)来实现。由于对于晶状体主体9a的光学效果而言,仅其轴向边界的曲率是重要的,因此出于光学原因增加中心厚度是没有问题的。
47.图12最后示出了在晶状体主体9a的前侧具有突出的边缘14的改进。这改善了前房和后房之间的密封。该密封保持存在于天然眼睛中的玻璃体/玻璃体液和前房的分离,甚至在手术后独立于囊膜地保持这种分离。这在图1至图12的所有实施例中实现。
48.图13阐明了在实施例中所使用的用于将人工晶状体9固定在眼晶状体6的剩余组织6c中的卡锁技术。图13中的上部的图这里示出分别沿线a-a和b-b的截面图。卡锁机构用于将人工晶状体9固定在被处理的天然晶状体的剩余组织6c中。为此,切出一个三维的袋,并且粉碎并移除不需要的眼晶状体6的组织。该袋包括合适的进入窗口21,人工晶状体9的翼部13可以通过该进入窗口植入。通过人工晶状体9的旋转,翼部13由现有晶状体材料向后引导并且人工晶状体9因此被固定在其轴向位置和旋转位置。这里,人工晶状体9被旋转直到翼部13抵靠在机械止动面19上为止。所述面限定正确的旋转位置并且因此限定在复曲面人工晶状体的情况下用于校正散光的正确轴向位置(achslage)。为了防止人工晶状体9的不希望的反向旋转,翼部13中的至少一个可选地由闩锁20引导。为了植入一个或多个翼部13,在被三维地制备的口袋中为每个翼部13形成有进入窗口21,通过所述进入窗口翼部可以在人工晶状体9旋转之前被植入到外围紧固区域6f中。以这种方式,具有晶状体主体70(其提供人工晶状体的光学效果)的人工晶状体9被固定在预定的轴向位置以及旋转位置,该固定是通过在晶状体主体70的边缘72处形成用于卡锁紧固的翼部13实现的。人工晶状体9没有触觉部(haptiken),即没有附接的臂(所述臂用于固定人工晶状体,否则该人工晶状
体会自由悬挂)。
49.图13在下部的四幅图中示出了在天然眼晶状体的组织6c中形成的容纳空间6d的平面图(左起第一图)、晶状体主体锚定在容纳空间中的、在对应于晶状体的中心平面的截面中的状态(左起第二图)、与左起第二图类似但用于不带闩锁20的变型的截面图(左起第三图)、以及用于不带末端止动部且不带闩锁位置的变型的同一截面的图示(图13中的右侧图)。
50.图14示意性地并排示出用于卡锁技术的人工晶状体的不同实现方式的五个图示。在左图中,人工晶状体有两个用于卡锁紧固的翼部。此外,以示例性方式示出孔23;孔可以用来定位和旋转人工晶状体9。翼部13位于人工晶状体的光学区域之外。在左起第二个图中仅提供一个翼部13。三个和四个翼部13分别形成在中间图和从左数第四个图中的晶状体主体9a上。最后,右侧图涉及用于图6和图7中的实施例的具有螺纹结构17的晶状体主体9a。
51.图15示意性地示出用于在眼睛30中处理眼晶状体6的治疗设备28(behandlungsvorrichtung)。设备28包括飞秒短脉冲激光器,如从现有技术中已知的,其用于产生光击穿并用于分离眼晶状体和囊袋中的组织。激光器32的射线通过扫描机构34(其用于对眼睛30中的焦点位置进行三维调节)和光学单元38被聚焦到眼晶状体6或囊袋中,使得组织可以在那里被分离,并且可以如上所述地处理眼晶状体6。在该过程中,射线还穿过分束器38,在分束器上光束路径被耦合输入到测量装置40(例如光学相干断层扫描设备、波前传感器、裂隙灯和/或沙姆弗鲁格相机(scheimpflug-kamera))中。激光器32、扫描仪34和测量装置40连接到控制器42,控制器42接收来自测量装置40的测量数据,从中确定眼睛结构的位置,特别是确定眼睛30中的晶状体和囊袋的位置,限定飞秒短脉冲激光器32的发射模式,并控制三维光束偏转34(在其范围内,物镜36也可以可选地参与),以使如期望地产生容纳空间(其带有用于人工晶状体9的尺寸稳定的晶状体主体9c的去除部和用于固定晶状体主体的外围紧固区域6c)的切面被相应地与剩余的眼组织6c分离,以便在移除该被分离的组织之后制备出相应的的结构,该结构使得能够植入晶状体内人工晶状体9。可以自由地选择测量装置40的光学连接并且不必一定要穿过光学单元38延伸。在其他实施例中,测量装置40(其精确测量眼睛并且还参考眼睛)在外部和内部耦合,例如耦合到光束路径,存在再次找到参考(结构)的简单配准装置,所述参考(结构)被测量仪器确定。
52.图16示意性地示出了用于焦点的所在地52的图案50,如在控制器42的控制下由扫描机构34产生的那样。切面8通过在图案50中适当地布置所在地52而产生,纯粹作为示例地,所述切面在图16中是平面的和正方形的。
53.图17示出一种用于规划晶状体外科操作的设备。该设备基本上由规划站60形成,规划站60具有输入接口62以获得源自测量装置64的关于眼睛30的测量数据。举例来说,这可以是光学相干断层扫描设备,其检测眼睛结构,尤其是以足够的准确度对眼晶状体进行成像。在输入接口62处提供的数据然后被计算机装置66用来限定切面。为此,外科医生可以在规划站60上输入适当的条目以便相应地限定切面8。此外,数据库可能已经在规划站60中可用,并且包含关于可能的人工晶状体9的规格,尤其是几何和尺寸规格。作为所实施的方法的结果,规划站60在在输出接口68处输出控制装置42的控制数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1