导管偏转控制组件的制作方法
导管偏转控制组件
背景技术:
1.当心脏组织的区域异常地传导电信号时,发生心律失常,诸如心房纤颤。用于治疗心律失常的规程包括外科中断用于此类信号的传导通路。通过施加能量(例如,射频(rf)能量)来选择性地消融心脏组织,可能停止或改变不需要的电信号从心脏的一部分到另一部分的传播。消融过程可通过形成电绝缘病灶或疤痕组织来提供对不需要的电通路的阻隔,该电绝缘病灶或疤痕组织有效地阻断异常电信号跨组织的通信。
2.在一些规程中,具有一个或多个rf电极的导管可用于提供心血管系统内的消融。导管可被插入到主要静脉或动脉(例如,股动脉)中,并且然后推进以将电极定位在心脏内或与心脏相邻的心血管结构(例如,肺静脉)中。一个或多个电极可被放置成与心脏组织或其他血管组织接触,并且然后利用rf能量激活,从而消融所接触的组织。在一些情况下,电极可以是双极性的。在一些其他情况下,单极电极可与同患者接触的接地焊盘或其他参考电极结合使用。冲洗可用于从消融导管的消融部件吸热;并且防止在消融位点附近形成血块。
3.消融导管的示例在以下文献中有所描述:2013年1月31日公布的名称为“integrated ablation system using catheter with multiple irrigation lumens”的美国公布号2013/0030426,其公开内容以引用方式全文并入本文;2017年11月2日公布的名称为“irrigated balloon catheter with flexible circuit electrode assembly”的美国公布号2017/0312022,其公开内容以引用方式全文并入本文;2018年3月1日公布的名称为“catheter with bipole electrode spacer and related methods”的美国公布号2018/0056038,其公开内容以引用方式全文并入本文;2018年11月20日公布的名称为“catheter with soft distal tip for mapping and ablating tubular region”的美国专利号10,130,422,其公开内容以引用方式全文并入本文;以及2017年10月31日公布的名称为“electrocardiogram noise reduction”的美国专利号9,801,585,其公开内容以引用方式全文并入本文。
4.一些导管消融规程可在使用电生理(ep)标测之后执行,以识别应当作为消融目标的组织区域。此类ep标测可包括在导管(例如,用于执行消融的同一导管或专用标测导管)上使用感测电极。此类感测电极可监测从导电心内膜组织发出的电信号以精确定位导致心律失常的异常导电组织位点的位置。ep标测系统和导管的示例在本文引用的各种参考文献中有所描述。
5.当使用消融导管时,可能期望确保消融导管的一个或多个电极充分接触目标组织。例如,可能期望确保一个或多个电极以足够的力接触目标组织,以有效地将rf消融能量施加到组织;但是不施加可能趋于不期望地损坏组织的一定程度的力。为此,可能期望包括用于检测消融导管的一个或多个电极和目标组织之间的充分接触的一个或多个力传感器或压力传感器。
6.除了使用力感测或ep标测之外,一些导管消融规程还可使用图像引导外科(igs)系统来执行。igs系统可使得医师能够实时地相对于患者体内的解剖结构的图像在视觉上
跟踪导管在患者体内的位置。一些系统可提供ep标测和igs功能的组合,包括加利福尼亚州尔湾市biosense webster有限公司的carto系统。被构造用于与igs系统一起使用的导管的示例公开于以下文献中:2016年11月1日公布的名称为“signal transmission using catheter braid wires”的美国专利号9,480,416,其公开内容以引用方式全文并入本文;以及本文引用的各种其他参考文献。
7.尽管已经制造和使用了若干导管系统和方法,但据信在发明人之前无人制造或使用本文所描述、示出和要求保护的发明。
附图说明
8.以下附图和具体实施方式旨在仅为示例性的,而不旨在限制本发明人所设想的本发明的范围。
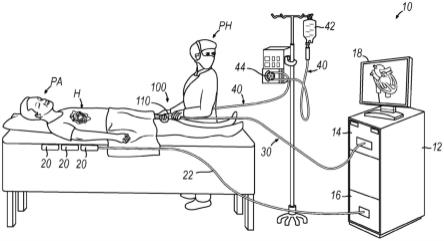
9.图1描绘了将导管组件的导管插入患者体内的医疗规程的示意透视图;
10.图2描绘了图1的导管组件的透视图,其中附件部件以示意性形式示出;
11.图3描绘了图1的导管的远侧部分的透视图,其中附加部件以示意性形式示出;
12.图4描绘了图1的导管的远侧部分的透视图,其中省略了外部护套以显示内部部件;
13.图5描绘了图1的导管的远侧部分的分解透视图;
14.图6描绘了图1的导管组件的柄部和偏转驱动组件的透视图,其中偏转驱动组件包括摇臂;
15.图7描绘了图6的柄部和偏转驱动组件的示意透视图,其中省略了柄部的一部分以显示包括齿条和小齿轮组件(rack and pinion assembly)的内部部件;
16.图8a描绘了图6的偏转驱动组件的顶部示意图,其中摇臂及齿条和小齿轮组件的齿条处于用于双向偏转的中立位置,并且第一示例性锁定组件处于解锁构造;
17.图8b描绘了图8a的偏转驱动组件的顶部示意图,但是摇臂处于第一位置,齿条处于第一纵向位置,并且锁定组件处于第一锁定构造;
18.图8c描绘了图8a的偏转驱动组件的顶部示意图,但是摇臂处于第二位置,齿条处于第二纵向位置,并且锁定组件处于第二锁定构造;
19.图9a描绘了图1的导管的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管的远侧部分处于与图8a的摇臂的中立位置相关联的中立位置;
20.图9b描绘了图1的导管的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管的远侧部分处于与图8b的摇臂的第一位置相关联的第一偏转位置;
21.图9c描绘了图1的导管的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管的远侧部分处于与图8c的摇臂的第二位置相关联的第二偏转位置;
22.图10a描绘了图6的偏转驱动组件的顶部示意图,其中摇臂及齿条和小齿轮组件的齿条处于用于单向偏转的中立位置,并且锁定组件处于第一锁定构造;
23.图10b描绘了图10a的偏转驱动组件的顶部示意图,但是摇臂处于第一旋转位置,齿条处于第一纵向位置,并且锁定组件处于第二锁定构造;
24.图11a描绘了图1的导管的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管的远侧部分处于与处于图10a的中立位置的摇臂相关联的非偏转位置;
25.图11b描绘了图1的导管的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管的远侧部分处于与图10b的摇臂的第一位置相关联的偏转位置;
26.图12描绘了第二示例性偏转驱动组件的顶部示意图,其中第二示例性锁定组件处于解锁构造;
27.图13描绘了第二示例性导管组件以及具有以示意性形式示出的附加组件的第三示例性偏转驱动组件的透视图,该第二示例性导管组件类似于图1的导管组件并且包括第二示例性导管;
28.图14描绘了图13的偏转驱动组件的透视图,该偏转驱动组件包括第三示例性齿条和小齿轮组件、推拉式缆线和第三示例性锁定组件;
29.图15a描绘了图14的偏转驱动组件的顶部示意图,其中线性滑动件处于第一纵向位置,齿条和小齿轮组件的齿条处于第一纵向位置,并且锁定组件处于解锁构造;
30.图15b描绘了图15a的偏转驱动组件的顶部示意图,但是线性滑动件处于第二纵向位置,齿条和小齿轮组件的齿条处于第二纵向位置,并且锁定组件处于第一锁定构造;
31.图15c描绘了图15a的偏转驱动组件的顶部示意图,但是线性滑动件处于第三纵向位置,齿条和小齿轮组件处于第三纵向位置,并且锁定组件处于第二锁定构造;
32.图16a描绘了图13的导管的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管的远侧部分处于与图15a的线性滑动件的第一纵向位置相关联的非偏转位置;
33.图16b描绘了图13的导管的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管的远侧部分处于与图15b的线性滑动件的第二纵向置相关联的第一偏转位置;
34.图16c描绘了图13的导管的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管的远侧部分处于与图15c的线性滑动件的第三纵向位置相关联的第二偏转位置;
35.图17描绘了第四示例性偏转驱动器的顶部示意图,其中第四示例性锁定组件处于锁定构造;并且
36.图18描绘了操作图1的导管组件的示例性方法的图解视图;
具体实施方式
37.本发明的某些示例的以下说明不应用于限定本发明的范围。附图(未必按比例绘制)描绘了所选择的实施方案,并不旨在限制本发明的范围。详细描述以举例的方式而非限制性方式示出本发明的原理。根据以举例的方式示出的以下说明,本发明的其他示例、特征、方面、实施方案和优点对于本领域的技术人员而言将是显而易见的,一种最佳方式被设想用于实施本发明。如将认识到,本发明能够具有其他不同或等价的方面,所有这些方面均不脱离本发明。因此,附图和说明应被视为实质上是例示性的而非限制性的。
38.本文所述的教导内容、表达、型式、示例等中的任何一者或多者可与本文所述的其
他教导内容、表达、型式、示例等中的任何一者或多者相结合。因此下述教导内容、表达、型式、示例等不应被视为彼此分离。参考本文的教导内容,本文的教导内容可进行组合的各种合适方式对于本领域的技术人员而言将显而易见。此类修改和变型旨在包括在权利要求书的范围内。
39.如本文所用,针对任何数值或范围的术语“约”或“大约”指示允许部件或元件的集合实现如本文所述的其预期要达到的目的的合适的尺寸公差。更具体地,“约”或“大约”可指列举值的值
±
10%的范围,例如“约90%”可指81%至99%的值范围。另外,如本文所用,术语“患者”、“宿主”、“用户”和“受检者”是指任何人或动物受检者,并不旨在将系统或方法局限于人使用,但本主题发明在人类患者中的使用代表优选的实施方案。
40.i.示例性消融导管系统的概述
41.图1示出了可用于提供如上提及的心脏消融术的心脏消融导管系统的示例性医疗规程和相关联的部件。具体地,图1示出了医师(ph)抓握导管组件(100)的柄部(110),其中导管组件(100)的导管(120)的端部执行器(140)(在图2至图3中示出但未在图1中示出)设置在患者(pa)体内以消融患者(pa)的心脏(h)之中或附近的组织。如图2所示,导管组件(100)包括柄部(110)、从柄部(110)朝远侧延伸的导管(120)、位于导管(120)的远侧端部处的端部执行器(140)和与柄部(110)相关联的偏转驱动组件(200)。
42.如将在下文更详细所述,端部执行器(140)包括各种部件,这些部件被构造成将rf能量递送到目标组织位点,提供ep标测功能,跟踪施加在端部执行器(140)上的外力,跟踪端部执行器(140)的位置以及分散冲洗流体。还如将在下文更详细所述,偏转驱动组件(200)被构造成使端部执行器(140)和导管(120)的远侧部分偏转远离由导管(120)的近侧部分限定的中心纵向轴线(l-l)(图3至图5)。
43.如图3所示,导管(120)包括细长柔性护套(122),其中端部执行器(140)设置在外部护套(122)的远侧端部处。端部执行器(140)和容纳在外部护套(122)中的各种部件将在下文更详细地描述。导管组件(100)经由缆线(30)与引导和驱动系统(10)联接。导管组件(100)也经由流体管道(40)与流体源(42)联接。一组场发生器(20)定位在患者(pa)的下面,并且经由另一个缆线(22)与引导和驱动系统(10)联接。场发生器(20)仅是任选的。
44.本示例的引导和驱动系统(10)包括控制台(12)和显示器(18)。控制台(12)包括第一驱动器模块(14)和第二驱动器模块(16)。第一驱动器模块(14)经由缆线(30)与导管组件(100)联接。在一些变型中,第一驱动器模块(14)可操作来接收经由端部执行器(140)的微电极(138)获得的ep标测信号,如在下文更详细地描述。控制台(12)包括处理器(未示出),该处理器处理此类ep标测信号,并且从而提供如本领域已知的ep标测。
45.本示例的第一驱动器模块(14)还可操作以向端部执行器(140)的远侧末端构件(142)提供rf功率(如将在下文更详细地描述),从而消融组织。第二驱动器模块(16)经由缆线(22)与场发生器(20)联接。第二驱动器模块(16)可操作以激活场发生器(20),从而在患者(pa)的心脏(h)周围生成交变磁场。例如,场发生器(20)可包括在容纳心脏(h)的预先确定的工作体积中生成交变磁场的线圈。第一驱动器模块(14)还可操作来从端部执行器(140)中的导航传感器组件(150)接收位置指示信号。在此类型式中,控制台(12)的处理器还可操作来处理来自导航传感器组件(150)的位置指示信号,以由此确定端部执行器(140)在患者(pa)体内的位置。
46.导航传感器组件(150)包括位于相应面板(151)上的一对线圈,该对线圈可操作来生成指示端部执行器(140)在患者(pa)体内的位置和取向的信号。线圈被构造成响应于由场发生器(20)生成的交变电磁场的存在而生成电信号。可用于生成与端部执行器(140)相关联的实时位置数据的其他部件和技术可包括无线三角测量、声学跟踪、光学跟踪、惯性跟踪等。另选地,端部执行器(140)可不具有导航传感器组件(150)。
47.显示器(18)与控制台(12)的处理器联接,并且可操作以呈现患者解剖结构的图像。此类图像可基于一组手术前或手术中获得的图像(例如,ct或mri扫描、3d标测图等)。通过显示器(18)提供的患者解剖结构的视图也可基于来自端部执行器(140)的导航传感器组件(150)的信号来动态地改变。例如,当导管(120)的端部执行器(140)在患者(pa)体内移动时,来自导航传感器组件(150)的对应位置数据可致使控制台(12)的处理器在显示器(18)中实时地更新患者解剖结构视图,以在端部执行器(140)在患者(pa)体内移动时描绘患者解剖结构在端部执行器(140)周围的区域。此外,控制台(12)的处理器可驱动显示器(18)以显示经由利用端部执行器(140)进行电生理(ep)标测检测到的或以其他方式(例如,使用专用ep标测导管等)检测到的异常导电组织位点的位置。仅以举例的方式,控制台(12)的处理器可驱动显示器(18)以诸如通过叠加被照明点、十字线或异常导电组织位点的一些其他形式的视觉指示,将异常导电组织位点的位置叠加在患者解剖结构的图像上。
48.控制台(12)的处理器还可驱动显示器(18)以诸如通过叠加被照明点、十字线、端部执行器(140)的图形表示或一些其他形式的视觉指示而将端部执行器(140)的当前位置叠加在患者解剖结构的图像上。随着医师(ph)使端部执行器(140)在患者(pa)体内移动,这种叠加的视觉指示也可实时地在显示器(18)上的患者解剖结构的图像内移动,从而随着端部执行器(140)在患者(pa)体内移动而向操作者提供关于端部执行器(140)在患者(pa)体内的位置的实时视觉反馈。因此,通过显示器(18)提供的图像可有效地提供端部执行器(140)在患者(pa)体内的位置的视频跟踪,而不必具有观看端部执行器(140)的任何光学器械(即,相机)。在同一视图中,显示器(18)可同时在视觉上指示通过ep标测检测到的异常导电组织位点的位置。因此,医师(ph)可观看显示器(18)以观察端部执行器(140)相对于标测的异常导电组织位点以及相对于患者(pa)体内相邻解剖结构的图像的实时定位。
49.本示例的流体源(42)包括包含盐水或一些其他合适的冲洗流体的袋。管道(40)包括柔性管,该柔性管进一步与泵(44)联接,可操作该泵以选择性地将流体从流体源(42)驱动至导管组件(100)。如在下文更详细地描述,此类冲洗流体可通过端部执行器(140)的远侧末端构件(142)的开口(158)排出。参考本文的教导内容,可以对本领域的技术人员而言将显而易见的任何合适方式提供这种冲洗。
50.ii.导管组件的示例性端部执行器
51.图3至图5更详细地示出了端部执行器(140)的示例性部件和导管(120)的远侧部分的其它部件。如上所述,端部执行器(140)包括各种部件,这些部件被构造成将rf能量递送到目标组织位点,提供ep标测功能,跟踪施加在端部执行器(140)上的外力,跟踪端部执行器(140)在患者(pa)体内的位置以及分散冲洗流体。例如,端部执行器(140)包括远侧末端构件(142)、远侧末端基座(144)、远侧电路盘(146)、应变仪组件(148)、导航传感器组件(150)、远侧间隔件叠堆(152)和一对近侧间隔件(154)。远侧末端构件(142)、远侧末端基座(144)、远侧电路盘(146)、应变仪组件(148)、导航传感器组件(150)、远侧间隔件叠堆(152)
和近侧间隔件(154)彼此同轴对准并且纵向堆叠,使得这些部件(144-154)限定堆叠式电路。推拉式缆线(160)和冲洗管(180)可沿导管(120)的长度延伸以到达端部执行器(140)。将在下文更详细地描述前述部件中的每个部件。外部护套(122)围绕除了远侧末端构件(142)之外的所有前述部件,该外部护套可以是柔性的。
52.如图3至图5所示,本示例的远侧末端构件(142)包括具有穹顶末端的圆筒状主体(156)。圆筒状主体(156)和穹顶末端可以由导电材料(诸如金属)形成。多个开口(158)穿过圆筒状主体(156)形成并且与远侧末端构件(142)的中空内部连通。因此,开口(158)允许冲洗流体从远侧末端构件(142)的内部穿过圆筒状主体(156)传送出来。还可操作圆筒状主体(156)和穹顶末端以将rf电能施加到组织,从而消融组织。此类rf电能可经由缆线(30)从第一驱动器模块(14)传送到最近侧间隔件(154)。远侧末端构件(142)还可包括被构造成提供温度感测能力的一个或多个热电偶。
53.如图3至图4所示,本示例的远侧末端构件(142)还包括安装到圆筒状主体(156)的一个或多个ep标测微电极(138)。ep标测微电极(138)被构造成从与ep标测微电极(138)形成接触的组织拾取电势。因此,ep标测微电极(138)可用于确定心血管解剖结构(例如,肺静脉等)内的组织中的异常电活动的位置。由ep标测微电极(138)拾取的信号可通过位于应变仪组件(148)近侧的层中的通孔或其他结构来传送,最终经由缆线(30)到达控制台(12)的第一驱动器模块(14)。根据本文引用的各种参考文献的教导内容,第一驱动器模块(14)可处理ep标测信号并向医师(ph)提供指示异常电活动的位置的对应反馈。
54.在其中圆筒状主体(156)由导电材料形成以为组织消融提供rf电能的型式中,电绝缘材料可插置在圆筒状主体(156)和ep标测微电极(138)之间,从而将ep标测微电极(138)与圆筒状主体(156)电隔离。ep标测微电极(138)可根据本文引用的各种专利参考文献的教导内容来建造和操作。虽然仅示出了一个ep标测微电极(138),但是远侧末端构件(142)可包括两个或更多个ep标测微电极(138)。另选地,远侧末端构件(142)可完全不具有ep标测微电极(138)。远侧末端基座(144)限定中心孔,该中心孔被构造成提供用于将冲洗流体传送到远侧末端构件(142)的中空内部的路径。远侧末端基座144形成远侧末端构件(142)的近侧边缘可邻接的环形肩部。远侧末端构件(142)还限定横向凹口,该横向凹口被构造成接收远侧末端构件(142)的朝近侧延伸的突片。
55.如图3至图4所示,远侧电路盘(146)定位在远侧末端基座(144)的近侧。远侧电路盘(146)包括可操作为经由远侧末端构件(142)的朝近侧延伸的突片将rf电能传送到远侧末端构件(142)的电路。在其中包括一个或多个ep标测电极(138)的型式中,远侧电路盘(146)还可包括能够操作来传送来自ep标测电极(138)的ep标测信号的电路。在一些型式中,远侧电路盘(146)还包括一个或多个发射线圈。此类发射线圈可提供信号(例如,来自微电极(138)的ep标测信号)到位于远侧电路盘(146)近侧的一个或多个互补线圈的无线通信。此外或另选地,此类发射线圈可提供rf电能从位于远侧电路盘(146)近侧的一个或多个互补线圈到远侧末端构件(142)的无线通信。
56.在其中线圈被并入到远侧电路盘(146)和位于应变仪组件(148)近侧的一个或多个其他层中的型式中,此类线圈可因此实现电信号跨应变仪组件(148)的无线通信,而不需要线、通孔或其他导电结构纵向穿过应变仪组件(148)。在一些型式中,远侧电路盘(146)包括与导航传感器组件(150)的接收线圈(rx)配对的至少一个发射线圈(tx),以检测施加到
应变仪组件(148)的应变,以便确定施加到远侧末端(142)的接触力。远侧电路盘(146)的一些其他型式可简单地省略tx线圈。
57.应变仪组件(148)定位在远侧电路盘(146)的近侧,并且被构造成感测撞击远侧末端构件(142)的外力。当远侧末端(142)遇到外力时(例如,当远侧末端(142)压靠着组织时),那些外力从远侧末端(142)传送到远侧末端基座(144)、传送到远侧电路盘(146)以及传送到应变仪组件(148),使得应变仪可生成对应于外力的量值和方向的合适信号。来自应变仪组件(148)的信号可通过位于应变仪组件(148)近侧的层中的通孔或其它结构来传送,最终经由缆线(30)到达控制台(12)的第一驱动器模块(14)。参考本文的教导内容,第一驱动器模块(14)可根据对本领域的普通技术人员而言将显而易见的任何合适方式处理应变信号。仅以举例的方式,当应变仪组件(148)指示远侧末端构件(142)遇到超过预先确定的阈值的力时,控制台(12)可提供听觉反馈以警示医师(ph),从而防止医师(ph)无意地用远侧末端构件(142)损坏心血管解剖结构。
58.导航传感器组件(150)可基本精确地生成指示端部执行器(140)在三维空间中的位置和取向的信号。导航传感器组件(150)包括多个面板(151),每个面板包括rx线圈,该rx线圈可操作为响应于由场发生器(20)生成的交变磁场而生成指示位置的电信号。每个rx线圈可由电迹线形成以限定电线圈或天线,从而接收由外部发射器tx线圈(例如,由定位在患者(pa)身体外部并发射离散射频的场发生器(20)提供的三个tx线圈)发射的射频信号,使得每个rx线圈的位置和取向可相对于由场发生器(20)提供的tx线圈来确定。来自导航传感器组件(150)的信号可通过位于应变导航传感器组件(150)近侧的层中的通孔或其它结构来传送,最终经由缆线(30)到达控制台(12)的第一驱动器模块(14)。
59.导航传感器组件(150)的中心环形主体限定中心孔,该中心孔被构造成提供用于将冲洗流体传送到远侧末端构件(142)的中空内部的路径。在导航传感器组件的中心环形主体包括无线通信线圈的型式中,此类无线通信线圈还可与位于应变导航传感器组件(150)近侧的层中的通孔或其它结构联接,从而提供用于经由缆线(30)与控制台(12)的第一驱动器模块(14)电通信的路径。
60.在本示例中,每个远侧间隔件(153)大体成形为盘状,其中一对脊索切口彼此成角度地偏移90度。这些切口的大小和构造被设置成适应导航传感器组件(150)的相应面板(151),从而允许面板(151)径向地插置在远侧间隔件叠堆(152)和外部护套(122)之间。每个远侧间隔件(153)还包括至少一个缆线凹口,其中两个或更多个凹口可以彼此成角度地偏移180度。这种缆线凹口被构造成接收推拉式缆线(160)的远侧端部部分(164)。每个远侧间隔件(153)还包括中心孔,该中心孔被构造成提供用于将冲洗流体传送到远侧末端构件(142)的中空内部的路径。每个近侧间隔件(154)被成形为盘状,该盘具有二个或更多个穿过其中形成的孔。中心孔被构造成提供用于将冲洗流体传送到远侧末端构件(142)的中空内部的路径。侧孔的尺寸和构造被设置成接收推拉式缆线(160)的近侧部分(162)。还可以包括第二侧孔。
61.如上文所述并且如图1和图3所示,缆线(30)将导管组件(100)与驱动系统(10)联接。如图4所示,缆线(30)的线(32)沿导管(120)的长度延伸以到达最近侧的近侧间隔件(154)。因此,线(32)可容纳在外部护套(122)内。线(32)可以任何合适的方式与最近侧的近侧间隔件(154)物理联接和电联接。导管组件(100)被构造成使得冲洗流体能够经由流体管
with deflection load limiter”的美国临时专利申请号62/866,109中有示出和描述,该美国临时专利申请的公开内容以引用的方式全文并入本文。
70.偏转驱动组件(300)被构造成使端部执行器(140)偏转远离由导管(120)的近侧部分限定的纵向轴线(l-l)。本示例的偏转驱动组件(300)包括与柄部(110)关联的摇臂(230)、平移组件(302)和与摇臂(230)联接的齿条和小齿轮组件(304)。平移组件(302)与齿条和小齿轮组件(304)和端部执行器(140)间接或直接联接。如所示的,平移组件(302)包括推拉式缆线(160)。如将在下文更详细所述,医师(ph)可相对于柄部(110)致动摇臂(230),使得齿条和小齿轮组件(304)致动推拉式缆线(160),以选择性地使端部执行器(140)横向偏转远离纵向轴线(l-l),从而使得医师(ph)能够主动地使端部执行器(140)在患者(pa)体内转向。摇臂(230)可以驱动平移组件(302)以使端部执行器(140)相对于纵向轴线(l-l)沿两个方向(向上和向下或者向左和向右)偏转一定角度(a)。摇臂(230)被构造成相对于柄部(110)围绕驱动轴线(d-d)旋转而不沿纵向轴线(l-l)平移。如所示的,驱动轴线(d-d)与纵向轴线(l-l)垂直。
71.齿条和小齿轮组件(304)具有齿条(306)和小齿轮(308)。在图7至图11b中仅示出了单个齿条(306)。齿条和小齿轮组件(304)将来自摇臂(230)的小齿轮(308)的旋转运动转换成齿条(306)的线性运动。齿条和小齿轮组件(304)使用轴(310)与摇臂(230)和平移组件(302)联接。如所示的,摇臂(230)和小齿轮(308)围绕驱动轴线(d-d)同轴。齿条(306)使用推拉式缆线(160)或驱动远侧末端构件(142)的单向偏转的另一个合适的平移构件可操作地与远侧末端构件(142)联接。齿条(306)包括多个齿(312)。类似地,小齿轮(308)包括被构造成选择性地啮合齿条(306)的齿(312)的多个齿(314)。如将参考图8a至图8c更详细描述的,偏转驱动组件(300)可以任选地包括锁定组件(316)。将描述几个合适的锁定组件示例;然而,也可以设想其他合适的锁定组件。
72.如所示的,平移组件(302)具有与齿条(306)和端部执行器(140)联接的单个推拉式缆线(160)。特别地,推拉式缆线(160)使用多种合适的附接方法中的任一种附接方法在近侧附接点(318)处与齿条(306)联接。类似地,推拉式缆线(160)使用多种合适的附接方法中的任一种附接方法在远侧附接点(321)处与端部执行器(140)联接。虽然推拉式缆线(160)一般在齿条(306)与小齿轮(308)啮合之后与齿条(306)联接,但也可以设想推拉式缆线(160)可以在齿条(306)与小齿轮(308)啮合之前与齿条(306)联接。偏转驱动组件(300)传递齿条(306)的线性运动以沿远侧方向推动推拉式缆线(160)(参见图9b)或者沿近侧方向拉动推拉式缆线(160)(参见图9c)。特别地,齿条和小齿轮组件(304)被构造成使用来自摇臂(230)的输入沿相反方向驱动单个推拉式缆线(160)。虽然推拉式缆线(160)被示出为不锈钢杆,但也可以设想具有足够弯曲性和柱强度的其他合适的推拉式缆线。
73.图8a至图8c示出了偏转驱动组件(300)使端部执行器(140)和导管(120)的远侧部分围绕纵向轴线(l-l)偏转的示例性使用。图8a和图9a示出了当端部执行器(140)处于中立的非偏转位置时的导管组件(100)。特别地,图8a示出了图6的偏转驱动组件(300)的顶部示意图,其中摇臂(230)处于中立位置。摇臂(230)能够绕枢轴点(319)枢转。当摇臂(230)处于中立位置时,齿条和小齿轮组件(304)的齿条(306)处于中立的非偏转位置。
74.图9a示出了图1的导管(120)的远侧部分的顶部平面图,其中省略了外部护套(122)的一部分以显示内部部件。推拉式缆线(160)处于与处于中立的非偏转位置的端部执
行器(140)相关联的中立的非偏转位置。如图9a至图9c所示,中间部分(162)从远侧端部部分(164)朝近侧延伸穿过导管(120)的外部护套(122)。中间部分(162)可包括彼此联接以便延伸至远侧端部部分(164)的各种节段。参考本文的教导内容,中间部分(162)的各种节段可通过对于本领域的技术人员而言将显而易见的任何合适方式来联接。
75.如图8a至图8c所示,锁定组件(316)插置于摇臂(230)和平移组件(302)之间。图8a示出了锁定组件(316),该锁定组件处于解锁构造从而使得端部执行器(140)可以沿一定范围的角度移动。在图8b和8c中示出的锁定构造中,锁定组件(316)将端部执行器(140)锁定在相对于纵向轴线(l-l)的期望角度。特别地,在图9b中,锁定组件(316)防止齿条(306)进一步朝远侧移动。锁定组件(316)包括限定锁定构造和解锁构造的锁定特征件(320,322,324)。如图8a所示,小齿轮(308)包括锁定特征件(320)。虽然小齿轮(308)被示出为仅包括单个锁定特征件(320),但小齿轮(308)可以包括围绕小齿轮(308)的圆周间隔开的两个或更多个锁定特征件。类似地,齿条(306)包括沿纵向轴线(l-l)彼此间隔开的锁定特征件(322,324)。如所示的,齿条(306)的锁定特征件(322,324)被设置在齿条(306)的工作长度的任一端部。齿条(306)可以包括更多或更少的锁定特征件。齿条(306)的锁定特征件(322,324)与小齿轮(308)的锁定特征件(320)互补。锁定特征件(320)在锁定构造中被构造成啮合锁定特征件(322,324)中的一个锁定特征件。
76.在解锁构造中,锁定特征件(322,324)与锁定特征件(320)间隔开一定距离。如所示的,锁定特征件(320,322,324)是圆筒状形状。特别地,小齿轮(308)的锁定特征件(320)是圆筒状销(326),而齿条(306)的锁定特征件(322,324)是圆筒状棘爪(328,330)。小齿轮(308)的锁定特征件(320)的圆筒状销(326)在锁定构造中被构造成可移除地与齿条(306)的锁定特征件(322,324)的圆筒状棘爪(328,330)联接(例如卡入到该圆筒状棘爪中)。圆筒状销(326)从摇臂(230)向下且整体地突出;与小齿轮(308)相邻。圆筒状销(326)可被定位成与齿轮齿尖相邻。圆筒状棘爪(328,330)可被形成到齿条(306)的齿轮齿槽中。
77.使用摇臂(230)以相同或更少的量的阻力,可将小齿轮(308)的圆筒状销(326)从齿条(306)的圆筒状棘爪(328,330)中的一个圆筒状棘爪上移除,以解锁端部执行器(140)的偏转。圆筒状销(326)和圆筒状棘爪(328,330)提供了这样的联接,该联接足够强以抵抗当锁定组件(316)处于图10b或图10c所示的状态时齿条(306)的意外纵向运动(例如,响应于患者解剖结构等施加在端部执行器上的横向力的意外纵向运动);但足够弱以使操作员能够有意地使该组件在图10a至图10c中所示的状态之间转变,而无需在摇臂(230)上施加过度的扭矩。锁定组件(316)可以在进入或退出锁定构造或解锁构造时提供触觉指示。尽管未示出,但是还为锁定特征件(320,322,324)设想了多种非圆筒状形状,包括球形锁定特征件。
78.图8b示出了图8a的偏转驱动组件(300)的顶部示意图,但摇臂(230)处于第二位置(顺时针旋转180度),齿条(306)处于第一纵向位置,并且锁定组件(316)处于第一锁定构造。如图8b所示,第一锁定构造是齿条(306)的最远侧位置。图9b示出了图1的导管(120)的远侧部分的顶部平面图,其中省略了外部护套(122)的一部分以显示内部部件,其中导管(120)的远侧部分处于与图8b的摇臂(230)的第一位置相关联的第一偏转位置。如图9b中最佳所示,摇臂(230)向图8b中所示的旋转位置的旋转将齿条和小齿轮组件(304)驱动到对应的纵向位置,使得推拉式缆线(160)被朝朝远侧驱动。如图8b所示,在第一锁定构造中,锁定
特征件(320)的圆筒状销(326)设置在锁定特征件(324)的圆筒状棘爪(330)中。
79.当医师(ph)期望使端部执行器(140)相对于中心纵向轴线(l-l)偏转到图9c所示的偏转位置时,医师(ph)可使摇臂(230)相对于柄部(110)旋转到图8c所示的位置。特别地,图8c示出了图8a的偏转驱动组件(300)的顶部示意图,但摇臂(230)处于第二位置,齿条和小齿轮组件(304)处于第二纵向位置;并且锁定组件(316)处于第二锁定构造。如图8c所示,第二锁定构造是齿条(306)的最近侧位置。图9c示出了图1的导管(120)的远侧部分的顶部平面图,其中省略了外部护套(122)的一部分以显示内部部件,其中包括冲洗管(180)在内的导管(120)的远侧部分处于与摇臂(230)的第二位置相关联的偏转位置。如图8c所示,摇臂(230)向图8c中所示的旋转位置的旋转将齿条和小齿轮组件(304)的小齿轮(308)驱动到对应的旋转位置,使得齿条(306)和推拉式缆线(160)朝近侧移动。如图8c所示,在第二锁定构造中,锁定特征件(320)的圆筒状销(326)设置在锁定特征件(322)的圆筒状棘爪(328)中。设想了医师(ph)可以将用于移动端部执行器(140)的摇臂(230)从图8a所示的位置旋转到图8c所示的位置,而不需要将摇臂(230)旋转到图8b所示的位置。
80.b.用于单向端部执行器偏转的第一示例性导管组件
81.可能需要修改被构造成如图8a至图9c所示向端部执行器(140)提供双向偏转的偏转驱动组件(300),以替代地如图10a-11b所示向端部执行器(140)提供单向偏转。末端执行器(140)的这种从双向偏转到单向偏转的切换可以在偏转驱动组件(300)制造(例如组装)时通过修改偏转驱动组件(300)的中立位置实现。例如,如图10a至图11b所示,这可以通过修改齿条和小齿轮组件(304)的初始位置和平移组件(302)与齿条和小齿轮组件(304)联接的纵向位置来获得。
82.图10a示出了图8a的偏转驱动组件(300)的顶部示意图,但摇臂(230)处于中立的非偏转位置,齿条(306)处于第一纵向位置,并且锁定组件(316)处于第一锁定构造。图11a示出了图1的导管(120)的远侧部分的顶部平面图,其中省略了外部护套(122)的一部分以显示内部部件,其中导管(120)的远侧部分处于中立的非偏转位置。如图10a所示,齿条和小齿轮组件(304)从图8a所示的中立构造调整为图10a所示的中立构造;并且推拉式缆线(160)被固定地紧固到齿条(306)上的纵向位置由图8a所示的中立位置调整为图10a所示的中立位置。如图10a所示,处于第一锁定构造的锁定组件(316)防止齿条(306)被朝远侧驱动。在第一锁定构造中,锁定特征件(320)的圆筒状销(326)设置在锁定特征件(324)的圆筒状棘爪(330)中。
83.图10b示出了图10a的偏转驱动组件(300)的顶部示意图,但是摇臂(230)处于第一旋转位置,齿条(306)被移动到第一纵向位置,并且锁定组件(316)处于第二锁定构造。图11b示出了图1的导管(120)的远侧部分的顶部平面图,其中省略了外部护套(122)的一部分以显示内部部件,其中导管(120)的远侧部分处于与图10b的摇臂(230)的第一位置相关联的偏转位置。如图11b所示,摇臂(230)从图10a所示的位置向图10b所示的位置的旋转将齿条和小齿轮组件(304)驱动到相应的旋转位置,使得推拉式缆线(160)被朝近侧驱动。尽管在本附图中未必示出,但应当理解,导管(120)的远侧部分可利用图10a至图11b所示的布置实现的侧向偏转程度(即,弯曲角)比可利用图8a至图9c所示的布置实现的侧向偏转程度(即,弯曲角)大。
84.c.第二示例性锁定组件
85.图12示出了第二示例性偏转驱动组件(400)的顶部示意图,其中第二示例性锁定组件(416)处于解锁构造。偏转驱动组件(400)包括类似于摇臂(230)的摇臂(401)、类似于平移组件(302)的平移组件(402)和类似于齿条和小齿轮组件(304)的齿条和小齿轮组件(404)。齿条和小齿轮组件(404)包括齿条(406)和小齿轮(408)。齿条(406)包括齿(412),并且小齿轮(408)包括齿(414)。齿条(406)在与近侧附接点(318)类似的附接点(418)处与平移组件(402)的推拉式缆线(434)联接。锁定组件(416)包括位于小齿轮(408)上的锁定特征件(420)和位于齿条(406)上的锁定特征件(422,424)。例如,锁定特征件(422)被示出为圆筒状销(426),该圆筒状销从摇臂(230)向下且整体地突出;与小齿轮(408)相邻。圆筒状销(426)可被定位成与齿轮齿尖相邻。锁定特征件(422,424)是分别形成在齿轮齿槽中的圆筒状棘爪(428,430)。摇臂(401)可以使用轴(410)与小齿轮(408)联接。轴(410)可固定地联接到摇臂(401)和小齿轮(408)中额一者或两者上。
86.锁定组件(416)可包括偏置构件(438),该偏置构件被构造成将齿条(406)偏置成远离小齿轮(408)以将锁定组件(416)从锁定构造转换为解锁构造。例如,齿条(406)可以由可弯曲材料(例如聚合物材料)形成。如所示的,偏置构件(438)从柄部(411)向外突出,使得偏置构件(438)可以由医师(ph)手动致动。设想了闭锁销(436)或偏置构件(438)可以单独使用或组合使用。
87.d.具有第三示例性锁定组件的用于双向端部执行器偏转的示例性导管组件的示例性导管组件
88.包括可平移致动器(例如线性滑动件)的导管组件通常可以被构造成仅提供端部执行器(140)的单向偏转。可能需要生产这样的导管组件,该导管组件包括能够提供端部执行器(140)的双向偏转的线性滑动件。此外,可能需要使用同一个生产线来生产包括线性滑动件的单向导管和包括线性滑动件的双向导管。如前面所描述,为单向导管和双向导管使用同一个生产线还可以节省训练组件操作员所需的时间,减少在生产线上混合部件的可能性,确保组件操作员在单向导管生产线和双向导管生产线之间的交叉兼容性,并在采购组件期间产生更大的批量折扣。至少出于这些原因,第二示例性导管组件(500)包括能够向端部执行器(504)提供双向偏转的输入构件(示出为线性滑动件(514))。与单向偏转相比,双向偏转向端部执行器(504)提供了更大范围的偏转角。
89.图13示出了类似于图1的导管组件(100)的导管组件(500)的透视图,其中附加部件以示意性形式示出;导管组件(500)包括类似于导管(120)的第二示例性导管(502)、类似于端部执行器(140)的端部执行器(504)、类似于柄部(110)的柄部(506)和第三示例性偏转驱动组件(508)。柄部(506)包括第一壳体部分和第二壳体部分(510,512)。偏转驱动组件(508)包括线性滑动件(514)、平移组件(516)和齿条和小齿轮组件(518)。线性滑动件(514)能够由医师(ph)沿纵向轴线(l-l)在虚线所示的最远侧位置(dp)和也以虚线所示的最近侧位置(pp)之间以及在最远侧位置(dp)和最近侧位置(pp)之间的任何位置处滑动。如所示的,线性滑动件(514)沿纵向轴线(l-l)平移而不旋转。
90.平移组件(516)包括推拉式缆线(520)。推拉式缆线(520)和类似于冲洗管(180)的冲洗管(521)可沿导管(120)的长度延伸以到达端部执行器(504)。缆线(30)将导管组件(500)与上述驱动系统(10)联接起来。缆线(30)的类似于图3的线(32)的线沿导管(502)的长度延伸以到达最近侧的近侧间隔件。线(32)可包含在类似于外部护套(122)的外部护套
(522)内。线(32)可以任何合适的方式与最近侧的近侧间隔件物理联接和电联接。
91.导管组件(500)被构造成使得冲洗流体能够经由流体管道(40)从类似于图3的流体源(42)的流体源传送到导管(502),从而提供冲洗流体经由远侧末端构件(523)的类似于图3的开口(158)的开口排出。与远侧末端构件(142)类似,远侧末端构件(523)包括具有穹顶末端的圆筒状主体(540)(参见图16a至图16c)。在本示例中,用于冲洗流体的流体路径包括冲洗管(521)。冲洗管(521)的近侧端部与(例如,在导管组件(500)的柄部(506)处的)流体管道(40)联接。冲洗管(541)沿导管(502)的长度延伸以到达端部执行器(504)。在一些型式中,冲洗流体可从冲洗管(541)的远侧端部传送穿过中心通路,最终经由类似于孔(218)的孔到达远侧末端构件(523)的内部。
92.图14示出了图13的偏转驱动组件(508)的透视图。与齿条和小齿轮组件(304)类似的齿条和小齿轮组件(518)包括齿条(524)和小齿轮(526)。如所示的,线性滑动件(514)与齿条(524)可固定地联接。齿条和小齿轮组件(518)将从线性滑动件(514)的线性运动获得的齿条(524)的线性运动转换成小齿轮(526)的旋转运动。小齿轮(526)从轴(528)延伸。齿条(524)包括多个齿(530)。类似地,小齿轮(308)包括被构造成选择性地啮合齿条(524)的齿(530)的多个齿(532)。推拉式缆线(520)具有部分(536,538)。齿条(524)经由推拉式缆线(520)或驱动远侧末端构件(523)双向偏转的另一合适的平移构件连接到远侧末端构件(523)。
93.继续参考图14,偏转驱动组件(508)包括与齿条和小齿轮组件(518)的小齿轮(526)同轴的滑轮(542)。滑轮(542)使用轴(528)可旋转地与小齿轮(526)联接。滑轮(542)包括界面表面(544),该界面表面被构造成摩擦地啮合推拉式缆线(520)。如将参考图15a至图16c更详细地描述的,柄部(110)使用齿条和小齿轮组件(518)将线性滑动件(514)的线性运动转换成通过滑轮(542)与推拉式缆线(520)同步的小齿轮(526)的旋转运动,以使远侧末端构件(523)偏转。远侧末端构件(523)沿多个方向偏转,同时在推拉式缆线(520)的部分(536,538)中的一个部分上提供张力并且在推拉式缆线(520)的部分(536,538)中的另一个部分上释放张力。
94.图15a至图16c示出了偏转驱动组件(508)使端部执行器(504)和导管(502)的远侧部分围绕中心纵向轴线(l-l)偏转的示例性使用。图15a示出了图14的偏转驱动组件(508)的顶部示意图。如所示的,线性滑动件(514)处于第一纵向位置(即中立位置),齿条和小齿轮组件(304)处于第一纵向位置(即中立位置),并且第三示例性锁定组件(534)处于解锁构造。虽然所示的中立位置具有设置在齿条(524)的中心中的小齿轮(526),但是该中立位置可以具有沿着齿条(524)朝更近侧或朝更远侧设置的小齿轮(526)。如图15a所示,小齿轮(526)和滑轮(542)彼此同轴并且彼此横向偏移。小齿轮(526)和滑轮(542)可经由轴(528)可旋转地联接在一起或者一起形成为一体件。例如,小齿轮(526)、轴(528)和滑轮(542)可以由塑料、金属或另外的合适的材料或材料组合形成。推拉式缆线(520)被示出为缠绕在滑轮(542)周围。齿条(524)的远侧部分可以在附接点(548)处与线(546)联接以使端部执行器(504)单向偏转,对于端部执行器(504)的单向偏转,通常不会省略该线。
95.如图15a至图15c所示,偏转驱动组件(300)可以任选地包括类似于锁定组件(316)的锁定组件(534)。锁定组件(534)包括限定锁定构造和解锁构造的锁定特征件(552,554,556)。如图15a所示,小齿轮(526)包括锁定特征件(552)。虽然小齿轮(526)被示出为仅包括
单个锁定特征件(552),但小齿轮(526)可以包括两个或更多个锁定特征件。类似地,齿条(524)包括沿纵向轴线(l-l)彼此间隔开的锁定特征件(554,556)。如所示的,齿条(524)的锁定特征件(554,556)被设置在齿条(524)的工作长度的任一端部。机架(524)可以包括更多或更少的锁定特征件。齿条(524)的锁定特征件(554,556)与小齿轮(526)的锁定特征件(552)互补。锁定特征件(552)在锁定构造中被构造成啮合锁定特征件(554,556)中的一个锁定特征件。
96.在解锁构造中,锁定特征件(554,556)与锁定特征件(552)间隔开一定距离。换言之,在图15a的解锁位置中,齿条(524)的锁定特征件(554,556)不与小齿轮(526)的锁定特征件(552)啮合。如所示的,锁定特征件(552,554,556)是圆筒状形状。特别地,小齿轮(526)的锁定特征件(552)是圆筒状销(558),而齿条(524)的锁定特征件(554,556)是圆筒状棘爪(560,562)。小齿轮(526)的锁定特征件(552)的圆筒状销(558)在锁定构造中被构造成可移除地与齿条(524)的锁定特征件(554,556)的圆筒状棘爪(560,562)联接(例如卡入到该圆筒状棘爪中)。圆筒状销(558)可被定位成与齿轮齿尖相邻。另选地,圆筒状销(558)可以从滑轮(542)整体突出;该滑轮可旋转地联接到小齿轮(526)。圆筒状棘爪(560,562)可被形成到齿条(524)的齿轮齿槽中。使用线性滑动件(514)以相同或更少的量的阻力,可将小齿轮(526)的圆筒状销(558)从齿条(524)的圆筒状棘爪(560,562)中的一个圆筒状棘爪上移除以解锁端部执行器(504)的偏转。因此,锁定组件(534)可以在进入或退出锁定构造和解锁构造时提供触觉指示。尽管未示出,但是还为锁定特征件(552,554,556)设想了多种非圆筒状形状。
97.图16a示出了图13的导管的远侧部分的顶部平面图,其中省略了外部护套(522)的一部分以显示内部部件,其中导管(502)的远侧部分处于与图15a的线性滑动件(514)的第一纵向位置相关联的中立的非偏转位置。因此,图16a示出了当端部执行器(504)处于中立的非偏转位置时的导管组件(500)。同样,推拉式缆线(520)处于与处于非偏转位置的端部执行器(504)相关联的第一位置。推拉式缆线(520)的部分(536)在附接点(564)处与端部执行器(504)的远侧末端构件(523)联接。类似地,推拉式缆线(520)的部分(538)在附接点(566)处与端部执行器(504)的远侧末端构件(523)联接。由于端部执行器(504)被示出为处于中立的非偏转位置,所以附接点(564)沿纵向轴线(l-l)设置在与附接点(566)大致相同的纵向位置处。
98.图15b示出了图15a的偏转驱动组件(508)的顶部示意图。如所示的,线性滑动件(514)处于第二纵向位置,齿条和小齿轮组件(304)处于第二纵向位置,并且锁定组件(534)处于第一锁定构造。如图15b所示,线性滑动件(514)被朝远侧致动(由箭头(568)示出),该线性滑动件沿纵向轴线(l-l)朝远侧驱动齿条(524)。如图15b所示,第一锁定构造是齿条(524)的最近侧位置。由于齿条(524)的齿(530)与小齿轮(526)的齿(532)啮合,因此齿条(524)的纵向运动导致小齿轮(526)沿顺时针方向旋转(如箭头(570)所示)。小齿轮(526)的该顺时针旋转驱动滑轮(542)的顺时针旋转,因为小齿轮(526)和滑轮(542)可旋转地联接。例如,小齿轮(526)和滑轮(542)可以互为一体或者以其他方式整体地紧固在一起。滑轮(542)的顺时针旋转驱动推拉式缆线(520)的顺时针旋转。特别地,推拉式缆线(520)的部分(536)沿远侧方向(由箭头(572)所示)被推动并且推拉式缆线(520)的部分(538)沿近侧方向(由箭头(574)所示)被拉动。如图15b所示,在第一锁定构造中,锁定特征件(552)的圆筒
状销(558)设置在锁定特征件(556)的圆筒状棘爪(562)中。
99.另选地,还设想了滑轮(542)可以用链轮代替,并且推拉式缆线(520)的至少一部分(例如,在操作期间将直接啮合链轮的部分)可以用链条代替,使得该链条可以缠绕在该链轮周围,其中第一和第二推拉式缆线接合到该链条的每一个端部。在此种利用链条和链轮布置的替代布置中,第一和第二推拉式缆线沿纵向轴线(l-l)朝相反方向以类似于2019年6月25日提交的名称为“catheter deflection system with deflection load limiter”的美国临时专利申请号62/866,109中示出和描述的双向导管的方式移动,该美国临时专利申请的公开内容以引用的方式全文并入本文。
100.图16b示出了图13的导管(502)的远侧部分的顶部平面图,其中省略了外部护套(522)的一部分以显示内部部件。如所示的,导管(502)的远侧部分处于与图15b的线性滑动件(514)的第二纵向位置相关联的第一偏转位置。当医师(ph)期望使端部执行器(504)相对于中心纵向轴线(l-l)沿第一方向偏转到图16b所示的第一偏转位置时,医师(ph)可使线性滑动件(514)相对于柄部(506)平移到图15b所示的位置。由于端部执行器(504)被示出为处于第一偏转位置,附接点(564)沿纵向轴线(l-l)设置在附接点(566)的远侧。
101.图15c描绘了图15a的偏转驱动组件(508)的顶部示意图,但是线性滑动件(514)处于第三纵向位置,齿条和小齿轮组件(518)处于第三纵向位置,并且锁定组件(534)处于第二锁定构造。如图15c所示,线性滑动件(514)被朝近侧致动(由箭头(576)示出),该线性滑动件沿纵向轴线(l-l)朝近侧驱动齿条(524)。由于齿条(524)的齿(530)与小齿轮(526)的齿(532)啮合,因此齿条(524)的纵向运动导致小齿轮(526)沿逆时针方向旋转(如箭头(578)所示)。小齿轮(526)的该旋转驱动滑轮(542)的逆时针旋转,因为小齿轮(526)和滑轮(542)可旋转地联接。滑轮(542)的逆时针旋转驱动推拉式缆线(160)的逆时针旋转。特别地,推拉式缆线(520)的部分(536)沿近侧方向(由箭头(580)所示)被拉动,并且推拉式缆线(520)的部分(538)沿远侧方向(如箭头(582)所示)被推动。如图15c所示,在第二锁定构造中,锁定特征件(552)的圆筒状销(558)设置在锁定特征件(554)的圆筒状棘爪(560)中。如图15c所示,第二锁定构造是齿条(524)的最近侧位置。
102.图16c示出了图13的导管(502)的远侧部分的顶部平面图,其中省略了外部护套的一部分以显示内部部件,其中导管(502)的远侧部分处于与图15c的线性滑动件(514)的第三纵向位置相关联的第二偏转位置。由于端部执行器(504)被示出为处于第二偏转位置,因此附接点(564)沿纵向轴线(l-l)设置在附接点(566)的近侧。
103.e.第四示例性锁定组件
104.图17示出了第四示例性偏转驱动组件(608)的顶部示意图,其中第四示例性锁定组件(634)处于锁定构造。偏转驱动组件(608)包括类似于线性滑动件(514)的线性滑动件(614)、类似于平移组件(516)的平移组件(616)和类似于齿条和小齿轮组件(518)的齿条和小齿轮组件(618)。齿条和小齿轮组件(618)包括具有齿(630)的齿条(624)和具有齿(632)的小齿轮(626)。齿条(624)与线性滑动件(614)联接。锁定组件(634)包括位于小齿轮(626)上的锁定特征件(652)和位于齿条(624)上的锁定特征件(654,656)。例如,锁定特征件(652)被示出为圆筒状销(658),并且锁定特征件(654,656)是分别形成在齿轮齿槽中的圆筒状棘爪(660,662)。圆筒状销(658)可以与滑轮(642)一起形成。
105.线性滑动件(614)被构造成沿纵向轴线(l-l)相对于柄部(606)平移。线性滑动件
(614)使用轴(628)与小齿轮(626)联接。轴(628)将小齿轮(626)和滑轮(642)可旋转地联接起来。偏转驱动组件(608)包括与齿条和小齿轮组件(618)的小齿轮(626)同轴的滑轮(642)。滑轮(642)使用轴(628)与小齿轮(626)可旋转地联接。滑轮(642)包括被构造成接触推拉式缆线(620)的界面表面(644)。齿条(524)的远侧部分可以在附接点(548)处与线(546)联接。推拉式缆线(620)具有类似于推拉式缆线(520)的部分(636,638)。推拉式缆线(620)的部分(636)在类似于附接点(564)的附接点处与端部执行器(504)的远侧末端构件(523)联接。推拉式缆线(620)的部分(638)在类似于附接点(566)的附接点处与端部执行器(504)的远侧末端构件(523)联接。
106.代替锁定特征件(652,654,656)或作为对锁定特征件(652,654,656)的补充,锁定组件(634)可包括这样的锁定特征件(示出为闭锁销(668)),该锁定特征件选择性地与线性滑动件(614)的齿(670)联接以保持端部执行器(504)的偏转角(参见图16a至图16c)。闭锁销(668)选择性地将线性滑动件(614)保持在锁定位置。代替锁定特征件(652,654,656)或闭锁销(668)或者作为对锁定特征件(652,654,656)或闭锁销(668)的补充,锁定组件(634)可包括这样的锁定特征件(示出为闭锁销(672)),该锁定特征件选择性地与齿条(624)的齿(674)联接以保持端部执行器(504)的偏转角(参见图16a-16c)。
107.f.示例性方法
108.图18示出了操作导管组件(100,500)的方法(700)。方法(700)的步骤(702a)包括使用旋转运动手动致动摇臂(230,401)。方法(700)的步骤(702b)包括使用线性运动手动致动线性滑动件(514,614)。方法(700)的步骤(704a)包括将摇臂(230,401)的旋转运动传递到小齿轮(308,408)。方法(700)的步骤(704b)包括将线性滑动件(514,614)的线性运动传递到齿条(524,624)。
109.方法(700)的步骤(706a)包括使用齿条和小齿轮组件(304,404)将小齿轮(308,408)的旋转运动转换成齿条(306,406)的后续旋转运动。方法(700)的步骤(706b)包括使用齿条和小齿轮组件(518,618)将齿条(524,624)的线性运动传递到小齿轮(526,626)的后续旋转运动中。方法(700)的步骤(708a)包括将齿条(306,406)的后续线性运动传递到平移组件(302,402)。方法(700)的步骤(708b)包括将小齿轮(526,626)的后续旋转运动传递到平移组件(516,616)。
110.方法(700)的步骤(710)包括使用平移组件(302,402)使端部执行器(140)相对于纵向轴线(l-l)偏转一定角度或者使用平移组件(516,616)使偏转端部执行器(504)相对于纵向轴线(l-l)偏转一定角度。方法(700)的步骤(712)包括使用锁定组件(316,416,534,634)将端部执行器(140,504,604)锁定在远离纵向轴线(l-l)的期望角度处于锁定构造中。
111.iv.示例性组合
112.以下实施例涉及本文的教导内容可被组合或应用的各种非穷尽性方式。应当理解,以下实施例并非旨在限制可在本专利申请或本专利申请的后续提交文件中的任何时间提供的任何权利要求的覆盖范围。不旨在进行免责声明。提供以下实施例仅仅是出于例示性目的。预期本文的各种教导内容可按多种其他方式进行布置和应用。还设想到,一些变型可省略在以下实施例中所提及的某些特征。因此,下文提及的方面或特征中的任一者均不应被视为决定性的,除非另外例如由发明人或关注发明人的继承者在稍后日期明确指明如此。如果本专利申请或与本专利申请相关的后续提交文件中提出的任何权利要求包括下文
提及的那些特征之外的附加特征,则这些附加特征不应被假定为因与专利性相关的任何原因而被添加。
113.实施例1
114.一种设备,该设备包括:(a)柄部;(b)导管,该导管从该柄部朝远侧延伸,该导管的近侧部分限定纵向轴线;(c)端部执行器,该端部执行器从该导管朝远侧延伸,该端部执行器包括至少一个电极;(d)偏转驱动组件,该偏转驱动组件被构造成使端部执行器偏转远离纵向轴线,该偏转驱动组件包括:(i)输入构件,该输入构件与柄部相关联;(ii)平移组件,该平移组件联接到端部执行器;和(iii)齿条和小齿轮组件,该齿条和小齿轮组件与输入构件和平移组件联接,该齿条和小齿轮组件被构造成:(1)将来自输入构件的小齿轮的旋转运动传递到齿条的线性运动中,以朝远侧推动或者朝近侧拉动该平移构件,或(2)将来自输入构件的齿条的线性运动传递到小齿轮的旋转运动中,以使平移构件的第一端部朝近侧移动并且使平移构件的第二端部朝远侧移动。
115.实施例2
116.根据实施例1所述的设备,该输入构件包括摇臂,该摇臂被构造成相对于该柄部围绕驱动轴线旋转,该齿条和小齿轮组件被构造成将来自该摇臂的该小齿轮的旋转运动传递到该齿条的线性运动中,以朝远侧推动或朝近侧拉动该平移构件。
117.实施例3
118.根据实施例2所述的设备,该平移组件进一步包括与该齿条联接的推拉式缆线,该偏转驱动组件被构造成传递该齿条的线性运动,以沿远侧方向推动该推拉式缆线或者沿近侧方向拉动该推拉式缆线。
119.实施例4
120.根据实施例2至实施例3中任何一项或多项所述的设备,该摇臂和该小齿轮围绕该驱动轴线同轴。
121.实施例5
122.根据实施例1所述的设备,该输入构件包括线性滑动件,该线性滑动件被构造成沿纵向轴线纵向移动,该齿条和小齿轮组件被构造成将来自该线性滑动件的该齿条的线性运动传递到该小齿轮的旋转运动中,以使平移构件的第一端部朝近侧移动并且使该平移构件的第二端部朝远侧移动。
123.实施例6
124.根据实施例1所述的设备,该平移组件进一步包括推拉式缆线,该推拉式缆线具有第一部分和第二部分,该偏转驱动组件被构造成传递该小齿轮的旋转运动,以沿远侧方向推动该推拉式缆线的该第一部分并且朝近侧方向拉动该推拉式缆线的该第二部分。
125.实施例7
126.根据实施例6所述的设备,该偏转驱动组件进一步包括滑轮,该滑轮与该齿条和小齿轮组件的小齿轮同轴,该滑轮包括被构造成与该推拉式缆线接触的界面表面。
127.实施例8
128.根据实施例5至实施例7中的任何一项或多项所述的设备,该线性滑动件与该齿条可固定地联接,并且该滑轮与该小齿轮可旋转地联接。
129.实施例9
130.根据任一前述实施例所述的设备,该设备进一步包括锁定组件,该锁定组件插置在该输入构件和该平移组件之间,该锁定组件能够在锁定构造和解锁构造之间移动,该锁定组件在锁定构造中被构造成将该端部执行器锁定在相对于纵向轴线的该角度。
131.实施例10
132.根据实施例9所述的设备,该锁定组件包括第一锁定特征件和第二锁定特征件,该第一锁定特征件和第二锁定特征件被构造成在锁定构造和解锁构造之间转变,该锁定组件在锁定构造中被构造成防止该平移组件沿着该纵向轴线平移。
133.实施例11
134.根据实施例10所述的设备,该第一锁定特征件设置在该小齿轮上,该第二锁定特征件设置在该齿条上,该第二锁定特征件与该第一锁定特征件互补,该第一锁定特征件和第二锁定特征件在锁定构造中被构造成彼此啮合,该第一锁定特征件和第二锁定特征件在解锁构造中被构造成彼此间隔开一定距离。
135.实施例12
136.根据实施例10至实施例11中任一项或多项所述的设备,该第一锁定特征件和第二锁定特征件是圆筒状的。
137.实施例13
138.根据实施例12所述的设备,该第一锁定特征件包括圆筒状销,该第二锁定特征件包括圆筒状棘爪,该棘爪在锁定构造中被构造成接收该圆筒状销。
139.实施例14
140.根据实施例13所述的设备,该圆筒状销从该输入构件上整体突出,该圆筒状棘爪被形成到该齿条的齿轮齿槽中。
141.实施例15
142.根据实施例9至实施例14中任一项所述的设备,该锁定组件进一步包括偏置构件,该偏置构件被构造成将该齿条偏置成远离该小齿轮以切换到该解锁构造。
143.实施例16
144.根据实施例1至实施例8中的任何一项或多项所述的设备,该设备进一步包括锁定组件,该锁定组件包括第一锁定特征件和第二锁定特征件,该第一锁定特征件和第二锁定特征件被构造成在锁定构造和解锁构造之间转变,该第一锁定特征件设置在平移组件上并且该第二锁定特征件选择性地定位在该柄部上。
145.实施例17
146.根据实施例10所述的设备,该输入构件包括摇臂,该摇臂被构造成围绕驱动轴线相对于该柄部旋转,该第一锁定特征件设置在该摇臂上并且该第二锁定特征件能够在该柄部上移动。
147.实施例18
148.根据实施例17所述的设备,该驱动轴线与该纵向轴线垂直。
149.实施例19
150.根据实施例10所述的设备,该输入构件包括线性滑动件,该线性滑动件被构造成沿该纵向轴线相对于该柄部平移,该第一锁定特征件设置在该线性滑动件上并且该第二锁定特征件能够在该柄部上移动。
151.实施例20
152.根据实施例1所述的设备,该平移组件由单个推拉式缆线组成,该齿条和小齿轮组件被构造成沿相反的方向驱动该单个推拉式缆线。
153.实施例21
154.根据实施例20所述的设备,该单个推拉式缆线包括不锈钢杆。
155.实施例22
156.根据实施例1至实施例21中任何一项或多项所述的设备,该至少一个电极被构造成发射rf能量。
157.实施例23
158.根据实施例1至实施例22中任何一项或多项所述的设备,该至少一个电极被构造成执行电生理标测。
159.实施例24
160.根据实施例1至实施例23中任何一项或多项所述的设备,该端部执行器包括应变仪组件。
161.实施例25
162.根据实施例1至实施例24中任何一项或多项所述的设备,该端部执行器被构造成发射冲洗流体。
163.实施例26
164.根据实施例1至实施例25中任何一项或多项所述的设备,该端部执行器包括位置传感器。
165.实施例27
166.一种设备,该设备包括:(a)柄部;(b)导管,该导管从该柄部朝远侧延伸,该导管的近侧部分限定纵向轴线;(c)端部执行器,该端部执行器从该导管朝远侧延伸,该端部执行器包括至少一个电极;(d)偏转驱动组件,该偏转驱动组件被构造成使端部执行器偏转远离该纵向轴线,该偏转驱动组件包括:(i)与柄部相关联的输入构件,(ii)联接到端部执行器的平移组件,该输入构件被构造成驱动该平移组件以使该端部执行器偏转远离该纵向轴线一定角度,和(iii)与该输入构件和该平移组件联接的齿条和小齿轮组件,该齿条和小齿轮组件由齿条和小齿轮组成,该齿条和小齿轮组件被构造成:(1)将来自该输入构件的该小齿轮的旋转运动传递到该齿条的线性运动中,以朝远侧推动或者朝近侧拉动该平移构件,或(2)将来自输入构件的该齿条的线性运动传递到该小齿轮的旋转运动中,以使该平移构件的第一端部朝近侧移动并且使该平移构件的第二端部朝远侧移动;和(e)锁定组件,该锁定组件被构造成在锁定构造和解锁构造之间转变,该锁定组件包括第一锁定特征件和第二锁定特征件,该第一锁定特征件和第二锁定特征件在锁定构造中被构造成将该端部执行器锁定在远离该纵向轴线的该角度,该第一锁定特征件和第二锁定特征件在该解锁构造中被构造成允许该端部执行器沿着一定范围的角度移动。
167.实施例28
168.根据实施例27所述的设备,该锁定组件插置在该输入构件和该平移组件之间,该锁定组件在该锁定构造中被构造成防止该平移组件沿着该纵向轴线平移。
169.实施例29
170.根据实施例28所述的设备,该第一锁定特征件设置在该小齿轮上,该第二锁定特征件设置在该齿条上,该第二锁定特征件与该第一锁定特征件互补,该第一锁定特征件和第二锁定特征件在该锁定构造中被构造成彼此啮合,该第一锁定特征件和第二锁定特征件在该解锁构造中被构造成彼此间隔开一定距离。
171.实施例30
172.根据实施例27至实施例30中任一项或多项所述的设备,该第一锁定特征件和第二锁定特征件是圆筒状的。
173.实施例31
174.根据实施例30所述的设备,该第一锁定特征件是圆筒状销,该第二锁定特征件是圆筒状棘爪,该圆筒状棘爪被构造成接收处于该锁定构造的圆筒状销。
175.实施例32
176.一种操作设备的方法,该设备包括:(a)柄部;(b)导管,该导管从该柄部朝远侧延伸,该导管的近侧部分限定纵向轴线;(c)端部执行器,该端部执行器从该导管朝远侧延伸,该端部执行器包括至少一个电极;(d)偏转驱动组件,该偏转驱动组件被构造成使该端部执行器偏转远离该纵向轴线,该偏转驱动组件包括:(i)输入构件,该输入构件与该柄部相关联,(ii)平移组件,该平移组件联接到该端部执行器;和(iii)齿条和小齿轮组件,该齿条和小齿轮组件与该输入构件和该平移组件联接,该齿条和小齿轮组件由齿条和小齿轮组成,该方法包括:(a)使用旋转运动或线性运动手动致动该输入构件;(b)将该输入构件的旋转运动传递给该小齿轮或者将该输入构件的线性运动传递给该齿条;(c)使用该齿条和小齿轮组件将该小齿轮的旋转运动传递到该齿条的后续线性运动中或者将该齿条的线性运动传递到该小齿轮的后续旋转运动中;(d)将该后续线性运动传递给该平移组件或者将该后续旋转运动传递给该平移组件;(e)使用该平移组件使该端部执行器偏离该纵向轴线一定角度。
177.实施例33
178.根据实施例32所述的方法,该方法进一步包括将该端部执行器锁定在远离该纵向轴线的角度处于该锁定构造中。
179.实施例34
180.一种制造设备的方法,该设备包括:(a)柄部;(b)导管,该导管从该柄部朝远侧延伸,该导管的近侧部分限定纵向轴线;(c)端部执行器,该端部执行器从该导管朝远侧延伸,该端部执行器包括至少一个电极;和(d)偏转驱动组件,该偏转驱动组件被构造成使该端部执行器偏转远离该纵向轴线,该偏转驱动组件包括:(i)与柄部相关联的输入构件,(ii)联接到该端部执行器的平移组件,和(iii)与该输入构件和该平移组件联接的齿条和小齿轮组件,该齿条和小齿轮组件由齿条和小齿轮组成,该方法包括:(a)插入该小齿轮以使其与该齿条在被构造用于单向端部执行器偏转的第一位置处啮合,该第一位置与沿着该齿条的用于双向端部执行器偏转的第二位置纵向间隔开;或者插入该小齿轮以使其与该齿条在被构造用于双向端部执行器偏转的第三位置处啮合,该第三位置与沿着该齿条的用于单向端部执行器偏转的第四位置纵向间隔开;(b)将该平移组件与该齿条和小齿轮组件附接。
181.v.杂项
182.本文所述的器械中的任一个器械可在规程之前和/或之后进行清洁和消毒。在一
种消毒技术中,将该装置放置在闭合且密封的容器诸如塑料袋或tyvek袋中。然后可将容器和装置放置在可穿透容器的辐射场中,诸如γ辐射、x射线、或高能电子。辐射可杀死装置上和容器中的细菌。然后可将经消毒的装置储存在无菌容器中,以用于以后使用。也可使用本领域已知的任何其他技术对装置进行消毒,包括但不限于β或γ辐射、环氧乙烷、过氧化氢、过乙酸和气相消毒(具有或不具有气体等离子体或蒸汽)。
183.应当理解,本文所述的任何实施例还可包括除上述那些之外或代替上述那些的各种其他特征。仅以举例的方式,本文所述的任何实施例还可包括以引用方式并入本文的各种参考文献中任何一者中公开的各种特征中的一种或多种。
184.应当理解,本文所述的教导内容、表达、实施方案、实施例等中的任何一者或多者可与本文所述的其他教导内容、表达、实施方案、实施例等中的任何一者或多者进行组合。因此,上述教导内容、表达、实施方案、实施例等不应被视为彼此孤立。参考本文的教导内容,本文的教导内容可进行组合的各种合适方式对于本领域的技术人员而言将显而易见。此类修改和变型旨在包括在权利要求书的范围内。
185.应当理解,据称以引用方式并入本文的任何专利、专利公布或其他公开材料,无论是全文或部分,仅在所并入的材料与本公开中所述的现有定义、陈述或者其他公开材料不冲突的范围内并入本文。因此,并且在必要的程度下,本文明确列出的公开内容代替以引用方式并入本文的任何冲突材料。据称以引用方式并入本文但与本文列出的现有定义、陈述或其他公开材料相冲突的任何材料或其部分,将仅在所并入的材料与现有的公开材料之间不产生冲突的程度下并入。
186.在已经示出并描述了本发明的各种型式的情况下,通过本领域技术人员在不脱离本发明范围的前提下进行适当修改来实现对本文所述方法和系统的进一步改进。已经提及了若干此类可能的修改,并且其他修改对于本领域的技术人员而言将显而易见。例如,上文所讨论的实施例、型式、几何形状、材料、尺寸、比率、步骤等等均是示例性的而非必需的。因此,本发明的范围应根据以下权利要求书来考虑,并且应理解为不限于说明书和附图中示出和描述的结构和操作的细节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1