带有机电制动系统的患者转运设备的制作方法
带有机电制动系统的患者转运设备
1.相关申请的交叉引用
2.本技术要求2019年12月30日提交的美国临时专利申请no.62/954,765的优先权和所有权益。
背景技术:
3.患者转运设备(例如病床、担架、婴儿床、轮椅和转运椅)有助于在医疗保健环境中对患者进行护理。传统的患者转运设备包括具有在其上支撑患者的患者支撑平台的支撑结构、使患者转运设备能够沿地板移动的轮子以及具有制动件以停止患者转运设备的移动的制动系统。
4.至少一些已知的制动系统包括安装到支撑结构以接合或分离制动件的手动竖板。用于接合和分离制动件的电制动系统也是已知的。通常,制动系统包括具有多个连杆的连杆机构,其中每个连杆被操作性地联接到制动件,使得一个连杆的运动引起其他连杆的运动以及所有制动件的相应接合或分离。在操作期间可能存在与连接、保护和/或支撑连杆和/或引导连杆的运动相关的难题。在将连杆机构连接到手动或电动致动器、确定制动系统的当前状态和/或确保制动件被完全接合或完全分离方面也可能存在难题。
5.需要解决上述难题中的一个或多个的带有制动系统的患者转运设备。
技术实现要素:
6.本公开内容涉及一种患者转运设备,其包括具有底座和患者支撑平台的支撑结构。多个轮子被联接于支撑结构,并且多个制动件被布置成制动这些轮子。连杆机构被操作性地联接到多个制动件并且可在以下各项之间操作:制动状态,其用以制动多个轮子;和释放状态,其用以释放多个轮子。连杆机构具有第一连杆和第二连杆,该第一连杆旋转以使多个制动件在制动状态与释放状态之间移动,该第二连杆滑动以使多个制动件在制动状态与释放状态之间移动。保持器被联接到支撑结构并与连杆机构配合以限制连杆机构的移动。保持器具有止动件和引导件,该止动件用于接合第一连杆以限制第一连杆的移动,该引导件用于接收第二连杆以限制第二连杆的移动。
7.本公开内容还涉及一种患者转运设备,其包括具有底座和患者支撑平台的支撑结构。多个轮子被联接于支撑结构,并且多个制动件被布置成制动这些轮子。连杆机构被操作性地联接到多个制动件并且可在以下之间操作:制动状态,其用以制动多个轮子;和释放状态,其用以释放多个轮子。位置传感器对连杆机构的操作做出响应以确定该连杆机构是处于制动状态还是释放状态。传感器致动器被联接到连杆机构以与连杆机构一起在制动状态与释放状态之间移动。传感器致动器具有致动头和接合接口,该致动头由支撑结构支撑以相对于位置传感器移动,该接合接口由连杆机构承载以与该连杆机构一起移动。
附图说明
8.图1是患者转运设备的透视图。
9.图2是患者转运设备的一部分的透视图,其示出了机电制动系统。
10.图3是患者转运设备的该部分的另一透视图,其示出了机电制动系统。
11.图4是患者转运设备的该部分的俯视图,其示出了该机电制动系统。
12.图5a是可以与机电制动系统一起使用的脚轮组件的截面图,其中,制动件处于制动状态。
13.图5b是可以与机电制动系统一起使用的脚轮组件的截面图,其中,制动件处于释放状态。
14.图6a-6c是分别处于释放状态、制动状态和转向锁定状态的机电制动系统的一部分的特写透视图。
15.图7是机电制动系统的连杆机构的多个部分的局部分解透视图。
16.图8是机电制动系统的手动致动器的截面透视图。
17.图9a是电动连杆和驱动构件的分解透视图。
18.图9b是电动连杆和驱动构件的另一分解透视图。
19.图10是电动连杆和驱动构件的透视图。
20.图11是电动连杆和驱动构件的截面透视图。
21.图11a是马达和驱动轴布置结构的俯视图,其示出了传感器和磁体。
22.图12a是局部分解透视图,其示出了用于连杆机构的保持器。
23.图12b是另一局部分解透视图,其示出了用于连杆机构的保持器。
24.图13是与连杆机构配合的保持器的截面透视图。
25.图14是局部分解透视图,其示出了脚轮杆与缓冲器(bumper)的连接,脚轮杆具有八角形特征。
26.图15是示出了被连接到缓冲器的脚轮杆的透视图。
27.图16是示出了支撑第一连杆的连杆支撑件的透视图。
28.图17是示出了支撑第一连杆的连杆支撑件的截面透视图。
29.图18是机电制动系统的部件的框图。
30.图19是联接到连杆和缓冲器的传感器致动器的俯视图。
31.图20是示出了横跨缓冲器导轨和头部导轨的轨道的截面透视图。
32.图21是由传感器致动器接合的开关的俯视图。
33.图22是传感器致动器的透视图。
34.图23是传感器致动器的另一透视图。
35.图24是示出了用于传感器致动器的致动头的连接器的截面透视图。
36.图25是达到细长槽孔中的硬停止极限的扇形齿轮的图示。
37.图26是机电制动系统的控制方案的占空比随时间变化的曲线图。
具体实施方式
38.参考图1,示出了用于在医疗保健环境中支持患者的患者转运设备30。图1所示的患者转运设备30是病床。然而,在其他实施例中,患者转运设备30可以是担架、婴儿床、轮椅、转运椅或用于护理患者的类似设备。
39.支撑结构32为患者提供支撑。图1中所示的支撑结构32包括底座34和支撑框架36。
底座34包括底座框架35。支撑框架36在图1中的底座框架35的上方被间隔开。支撑结构32还包括被设置在支撑框架36上的患者支撑平台38。患者支撑平台38包括几个部分,其中一些能够相对于支撑框架36铰接(例如,枢转),例如靠背(fowler)部分41、座位部分43、支腿部分45和脚部分47。患者支撑平台38提供其上支撑患者的患者支撑表面42。
40.在使用期间,患者支撑平台38上设置有床垫(未示出)。该床垫包括其上支撑患者的第二患者支撑表面。底座34、支撑框架36、患者支撑平台38和患者支撑表面42各自具有对应于患者头部和脚部在患者转运设备30上的指定位置的头端和脚端。底座34包括沿其从头端到脚端的长度的纵向轴线l1。底座34还包括竖向轴线v,该竖向轴线v被与纵向轴线l1交叉地(例如,垂直地)布置,支撑框架36被沿着该竖向轴线v相对于底座34提升和降低。支撑结构32的结构可以采用任何已知的或传统的设计,并且不限于上面具体阐述的情况。此外,在某些实施例中可以省略掉床垫,使得患者直接靠在患者支撑表面42上。
41.诸如侧向围栏44、46、48、50之类的患者挡板被联接到支撑框架36和/或患者支撑平台38并由此被底座34支撑。第一侧向围栏44被定位在右侧头端。第二侧向围栏46被定位于右侧脚端。第三侧向围栏48被定位于左侧头端。第四侧向围栏50被定位于左侧脚端。在所示实施例中,头端侧向围栏44、48被安装到靠背部分41以与靠背部分41一起移动。脚端侧向围栏46、50被安装到支撑框架36以与支撑框架36一起移动。如果患者转运设备30是担架或婴儿床,则可以存在较少的侧向围栏。侧向围栏44、46、48、50可相对于靠背部分41/支撑框架36移动到升高位置、一个或多个中间位置以及一个较低位置,在该升高位置中,它们阻止进出患者转运设备30,在该较低的位置中,它们不会成为这种进出的障碍。在所示实施例中,侧向围栏44、46、48、50被通过枢转支撑臂连接到靠背部分41和/或支撑框架36以形成四杆连杆机构。这种侧向围栏以及它们可以升高/降低的方式在2016年12月15日提交的标题为“用于患者支撑设备的电动侧向围栏(powered side rail for a patient support apparatus)”的美国专利申请公开文献no.2017/0172829中予以示出和描述,该文献被通过引用全部结合到本文中。
42.床头板52和竖板54被联接到支撑框架36。床头板52和竖板54可被联接到患者转运设备30上的任何位置,例如支撑框架36或底座34。在其他实施例中,患者转运设备30不包括床头板52和/或竖板54。
43.护理人员接口56(例如把手)被示出为被集成到床头板52、竖板54和侧向围栏44、46、48、50中,以促进患者转运设备30在地板表面上的移动。额外的护理人员接口56可被集成到患者转运设备30的其他部件中。护理人员接口56可由护理人员抓握住,以操纵患者转运设备30移动,以移动侧向围栏44、46、48、50等。
44.还设想到了其他形式的护理人员接口56。护理人员接口可以包括被联接到支撑框架36的一个或多个把手。护理人员接口可以仅为患者转运设备30上的一个表面,该护理人员在该表面上逻辑地施加力以致使患者转运设备30沿一个或多个方向移动,其也被称为推送位置。这可以包括支撑框架36或底座34上的一个或多个表面。这还可以包括在床头板52、竖板54和/或侧向围栏44、46、48、50上或附近的一个或多个表面。在其他实施例中,护理人员接口可以包括用于护理人员的每只手的单独的把手。例如,护理人员接口可以包括两个把手。
45.移动装置被联接到底座34以促进在地板表面上的转运。移动装置包括多个轮子
58。轮子58被布置在底座34的四个象限中的每一个中,与底座34的拐角相邻。在所示实施例中,轮子58是在转运过程中能够相对于支撑结构32旋转和回转的脚轮。每个轮子58形成脚轮组件60的一部分。每个脚轮组件60被安装到底座34并且包括制动件62以制动轮子58(其一个示例被示于图5a-5b中)。应当理解,可以设想到脚轮组件60的各种构型。此外,在一些实施例中,轮子58不是脚轮并且可以是不可转向的、可转向的、非电动的、电动的或其组合。还设想到了额外的轮子。例如,患者转运设备30可以包括四个非电动的不可转向的轮子以及一个或多个电动轮子。在一些情况下,患者转运设备30可以不包括任何轮子。
46.在其他实施例中,可在收起位置和展开位置之间移动的一个或多个辅助轮(电动的或非电动的)可被联接到支撑结构32。在一些情况下,当这些辅助轮被定位于脚轮组件60之间并且在展开位置中接触地板表面时,它们致使脚轮组件60中的两个被抬离地板表面,从而缩短了患者转运设备30的轴距。也可以将第五轮大致布置在底座34的中心。
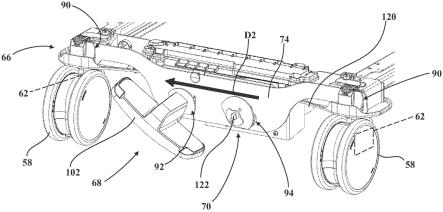
47.参考图2-4,患者转运设备30包括机电制动系统64,以使用户(例如护理人员)能够选择性地接合或分离与轮子58相关联的制动件62。患者转运设备30被在图2-4中示出,其中,支撑框架36和患者支撑平台38出于说明的目的而被移除。应当理解,在所示实施例中,每个轮子58具有相关联的制动件62,但在一些版本中,可能不非所有的轮子58都具有相关联的制动件62,例如,四个轮子58中的仅一个、两个或三个具有相关联的制动件62。在一些版本中,机电制动系统64可以包括被布置成制动轮子58的多个制动件62(例如,两个、三个、四个等)。
48.机电制动系统64包括被操作性地联接到制动件62的连杆机构66、被联接到连杆机构66的手动致动器68和被联接到连杆机构66的电制动组件70。连杆机构66被配置成响应于经由手动致动器68或电动制动组件70的致动而移动以操作制动件62,如下文进一步所述。
49.如图4所示,连杆机构66包括一对第一连杆72。在一些实施例中,第一连杆72中的每一个包括具有六边形截面形状的细长轴。第一连杆72也可被称为六角轴。第一连杆72从患者转运设备30的头端纵向地、大致平行于纵向轴线l1延伸到患者转运设备30的脚端。第一连杆72由底座34可旋转地支撑以围绕它们的轴线旋转。例如,第一连杆72可被经由衬套b、轴承等可旋转地支撑在脚轮壳体ch或底座34的其他支架中(脚轮壳体ch在图4中以虚线示出)。
50.连杆机构66还包括被横向布置于头端和脚端中的每一个处的一对第二连杆74。在一些实施例中,第二连杆74包括如下文进一步描述的齿轮驱动的齿条。第二连杆74由底座34支撑以相对于底座34横向地滑动。第二连杆74中的每一个被操作性地联接到两个第一连杆72,使得第二连杆74中的任一个的运动导致两个第一连杆72的相应运动和第二连杆74中的另一个的运动。换句话说,第一连杆72和第二连杆74被操作性地互连,使得连杆72、74中的任一个的运动引起其他连杆72、74的运动。例如,第二连杆74中的一个经由手动致动器68或电制动组件70的运动用于滑动第二连杆74,从而使两个第一连杆72旋转以操作制动件62。
51.在所示实施例中,连杆机构66被布置成且可操作以将制动件62置于制动状态(图5a所示)和释放状态(图5b所示),在制动状态中,每个制动件62用于制动相应轮子58的运动,在释放状态中,每个制动件62被释放以免于制动该轮子58。释放状态也可被称为中性状态。连杆机构66还可被联接到一个或多个转向锁定机构(未示出),以将一个或多个转向锁
定机构置于转向锁定状态,在该转向锁定状态中,轮子58中的一个或多个被阻止回转,而其他轮子58保持能够回转。
52.如图5a和图5b所示,在一些实施例中,每个脚轮组件60包括沿轮子58的内表面限定的多个齿76。偏心构件78被联接到第一连杆72中的一个,以与第一连杆72一起围绕其轴线a旋转。偏心构件78(也被称为凸轮)包括作用在转换头82上的致动突起80。转换头82被联接到可在竖直方向上移动的转换销84。压缩弹簧86被附接至转换销84以将转换销84在竖直向上的方向上朝向偏心构件78偏压。制动件62被联接至转换销84并包括多个制动齿88,这多个制动齿88被布置成接合沿轮子58的内表面限定的齿76。在操作期间,当第一连杆72被经由手动致动器68或电制动组件70的致动而围绕其轴线a旋转时,偏心构件78被旋转以使致动突起80沿着转换头82的轮廓表面移动,以在制动状态(图5a)与释放状态(图5b)之间移动制动件62,在制动状态中,制动齿88接合沿轮子58的内表面限定的齿76,在释放状态中,制动齿88与沿轮子58的内表面限定的齿76间隔开一定距离。
53.在患者转运设备30的所示版本中,一对第一连杆72中的每一个在两个脚轮组件60之间延伸以操作用于两个脚轮组件60的制动件62。换句话说,第一连杆72中的一个的旋转操作用于两个脚轮组件60的两个制动件,并且第一连杆72中的另一个的旋转操作用于两个其他脚轮组件60的两个制动件,使得所有四个脚轮组件60基本上同时被制动(由于连杆机构66中的任何倾斜或公差而基本上同时)。
54.也可以使用具有经由六角轴或其他适用的致动构件操作的制动件的其他适用的脚轮组件。例如,脚轮组件和相关联的制动件可以类似于标题为“具有制动件锁定系统的轮式托架(wheeled carriage with brake lock system)”的美国专利no.8,789,662中公开的那些,该专利被通过引用结合到本文中。此外,制动件还可以是外部制动件或经由连杆机构操作的其他形式的制动件,但可以不是脚轮组件的一部分。
55.参考图6a-6c,手动致动器68(在头端和脚端各一个)被联接到连杆机构66以手动地移动连杆机构66,从而将制动件62置于制动状态或释放状态,或将转向锁定机构置于转向锁定状态。手动致动器68可由护理人员操作以将连杆机构66和制动件62置于释放状态,从而释放轮子58(图6a),或者可由护理人员操作以将连杆机构66和制动件62置于释放状态,从而制动轮子58(图6b),或者可由护理人员操作以将连杆机构置于转向锁定状态(图6c)。图6a-6c中所示的手动致动器68使第二连杆74沿第一方向d1移动,以将制动件62置于制动状态(参见从图6a到图6b的过渡)并且使第二连杆74沿第二方向d2移动(参见从图6b到图6a的过渡),以将制动件62从制动状态置于释放状态。注意,出于图示说明连杆机构66在多种状态之间的运动的目的,机电制动系统64的各种部件在图6a-6c中均被移除。
56.电制动组件70也被联接到连杆机构66并且包括马达120和驱动轴122,该驱动轴122被配置成移动该连杆机构66以将机电制动系统64置于制动状态、释放状态和/或转向锁定状态。电制动组件70具有下文进一步描述的驱动构件106,该驱动构件106被配置成由驱动轴122移动以致使第二连杆74沿第一方向d1移动,从而将制动件62置于制动状态,并致使第二连杆74沿第二方向d2移动,从而将制动件62从制动状态置于释放状态。手动致动器68、电制动组件70的操作细节和相应的运动在标题为“带有机电制动系统的患者转运设备(patient transport apparatus with electro-mechanical braking system)”的美国专利申请公开文献no.2019/0192364中予以描述,该文献被通过引用结合到本文中。
57.参考图7-10,在所示实施例中,连杆机构66包括多个联接连杆90(在头端和脚端各两个,虽然只显示了一端)。在所示版本中,存在四个联接连杆90(每端各两个)。每个联接连杆90将第一连杆72中的一个联接到第二连杆74中的一个。连杆机构66还包括一对手动驱动连杆92(在头端和脚端中的每一个处各有一个)。每个手动驱动连杆92都被配置成由手动致动器68中的一个(在头端和脚端各一个)直接驱动以引起连杆机构66的移动。连杆机构66还包括电动连杆94。电动连杆94被配置成由电制动组件70的驱动构件106驱动,以引起连杆机构66的移动。在所示版本中仅存在一个电动连杆94,但可以使用其他电动连杆94。
58.如图7中最佳所示,每个第二连杆74限定了延伸穿过第二连杆74的多个啮合槽孔96(图7中仅示出了第二连杆74中的一个)。每个啮合槽孔96的尺寸和形状被设计成在其中接收相应的联接连杆90或驱动连杆92、94。在所示实施例中,每个联接连杆90和每个驱动连杆92、94包括扇形齿轮98。扇形齿轮98可以是联接连杆90和驱动连杆92、94的单独部件或一体部件。啮合槽孔96可包括多个啮合齿97,这多个啮合齿97被配置成在扇形齿轮98在其啮合槽孔96中旋转期间接触扇形齿轮98的相应齿。扇形齿轮98被定位在啮合槽孔96内,使得扇形齿轮98的移动与第二连杆74的移动相关联。更具体地,扇形齿轮98的旋转轴线被相对于底座34固定住,使得扇形齿轮98的旋转引起第二连杆74(即,以齿轮和齿条的方式)在多种状态之间的滑移。
59.在一些实施例中,扇形齿轮98在各种状态之间移动时旋转小于90度,并且在一些情况下,小于60度或小于45度,使得扇形齿轮98在接合槽孔96中的总旋转小于180度、小于120度或小于90度。另外,两个外部扇形齿轮98的(即,联接连杆90的)齿在于各种状态之间操作期间大致朝下,而两个内部扇形齿轮的(即,驱动连杆92、94的)齿在于各种状态之间操作期间大致面向上,以至少部分地限制第二连杆74的竖直运动。
60.如图7所示,每个联接连杆90和每个驱动连杆92、94由两个相同的半部(包括扇形齿轮98的两个半部)形成,这两个半部被通过啮合槽孔96夹在一起(仅对一个半部予以编号)。两个半部可具有下文进一步描述的适用的对准特征以将两个半部配合在一起。这些半部可被通过任何适用的方法(例如焊接、粘合剂、紧固件、铜焊、卡扣连接等)彼此固定住。
61.联接连杆90的扇形齿轮98被例如通过将扇形齿轮98的六角形通孔99配合到六角轴上而被安装到第一连杆72。联接连杆90的扇形齿轮98可被以其他方式安装于第一连杆72,使得这些扇形齿轮98在连杆机构66的操作期间与第一连杆72一起旋转。手动驱动连杆92的扇形齿轮98被安装到手动致动器68的手动致动轴100。手动致动轴100由底座34可旋转地支撑。该扇形齿轮98被例如经由匹配的双d型型连接安装到手动致动轴100,以便在手动致动器68被护理人员致动时(或在手动致动轴100例如在致动期间由电制动组件70被动地旋转时)与手动致动轴100一起围绕其轴线a2旋转。如下文进一步所述,电动连杆94的扇形齿轮98响应于电制动组件70的操作以围绕驱动轴122的轴线a3旋转。在连杆机构66的操作期间,扇形齿轮98围绕它们相应的轴线a、a2、a3旋转,第二连杆74滑动,并且第一连杆72围绕它们的轴线a旋转,以使多个制动件62在多种状态之间移动(再次参见图5a和图5b)。
62.简要回顾图6a和图6b,在机电制动系统64的操作期间,随着第二连杆74(例如,经由通过手动致动器68和手动驱动连杆92的致动,或经由通过电制动组件70和电动连杆94的致动)在第一方向d1上滑动,第二连杆74(经由扇形齿轮98和齿97的啮合)引起联接连杆90的移动,这使第一连杆72沿逆时针方向围绕它们的轴线a旋转,以将制动件62移动到制动状
态(图6b)。随着第二连杆74沿第二方向d2滑动,第二连杆74移动联接连杆90以使第一连杆72围绕其轴线a沿顺时针方向旋转,从而将相应的制动件62移动到释放状态(图6a)。在一些实施例中,第一连杆72沿顺时针方向的进一步移动将转向锁定机构移动到转向锁定状态。
63.当然,虽然上面仅描述了第二连杆74中的一个的移动,但是当第一连杆72和第二连杆74被互连以基本上同时操作时,这种移动也引起另一第二连杆74的移动。更具体地,另一第二连杆74也由于存在于患者转运设备30的相对端的联接连杆90而滑动。这些联接连杆90将第一连杆72联接到另一第二连杆74(参见图3)。第一连杆72和另一第二连杆74以与上述用于图7-10中所示的联接连杆90的相同方式联接到这些联接连杆90。在一些版本中,可能存在仅一个第二连杆74和仅一个手动致动器68,例如,另一手动致动器68和另一第二连杆74可能不存在。
64.参考图7和图8,手动驱动连杆92联接到手动致动器68以使第二连杆74能够在第一方向d1和第二方向d2上被手动移动。在图示的实施例中,手动致动器68包括手动致动轴100和联接到手动致动轴100的制动踏板102。手动致动轴100被联接到制动踏板102,使得制动踏板102的旋转引起手动致动轴100的旋转和手动驱动连杆92的相应旋转,这致使第二连杆74沿第一方向d1或第二方向d2滑动。例如,手动驱动连杆92的扇形齿轮98被配置成接触相应的啮合槽孔96的啮合齿97,使得手动驱动连杆92的旋转致使第二连杆74滑动。在操作期间,护理人员可以操作制动踏板102以使手动驱动轴100和手动驱动连杆92沿顺时针方向旋转,从而使第二连杆74沿第一方向d1移动,以使制动件62移动到制动状态。护理人员可以操作制动踏板102以使手动致动轴100和手动驱动连杆92沿逆时针方向旋转,从而使第二连杆74沿第二方向d2移动,以使制动件62移动到释放状态。在一些实施例中,沿第二方向d2的进一步移动致使转向锁定机构移动到转向锁定状态。
65.特别参照图8,在所示的版本中,手动致动轴100被由适用的衬套b或轴承支撑以在底座34中围绕轴线a2(例如,在如图8所示的底座34的壳体或支架中)旋转。手动致动轴100的双d型部分101穿过手动驱动连杆92并(例如,经由手动驱动连杆92中的配合的双d型开口)与该手动驱动连杆92适当地配合以进行类似的旋转。双d型部分101具有双d型截面形状或其他适用的旋转限制形状,其与手动驱动连杆92中的以类似方式成形的通孔匹配。制动踏板102还限定双d型孔103(或其他适用的形状)以接收手动致动轴100的双d型部分101,使得制动踏板102的旋转导致手动致动轴100的旋转和手动驱动连杆92的类似旋转。制动踏板102具有凸台105,该凸台105穿过被固定于底座34的覆层中的开口,该底座34遮蔽住手动驱动连杆92。紧固件107(例如,螺钉、螺栓等)可被插入到制动踏板102的与孔103横向的另一孔109中。紧固件107穿过手动驱动轴100的双d型部分101中的横向通孔111以将制动踏板102轴向地固定到手动驱动轴100上。手动驱动轴100的另一端被扩大以将手动驱动轴100轴向地保持于底座34,同时允许手动驱动轴100相对于底座34旋转。
66.在一些版本中,制动踏板102通过注塑成型形成,并且孔103可被使用液压滑座形成,使得孔103具有0度的拔模角度,以允许与手动致动轴100的双d型部分101紧密配合,并且使护理人员施加的负载能够行进穿过制动踏板102。紧固件107可以是可拆卸的紧固件,该紧固件是一种塑料螺纹成型件,其在双d型部分101的两侧上被旋拧到制动踏板102的塑料中,以便提供制动踏板102的牢固保持,从而防止制动踏板102从双d型部分101滑落。此外,如果双d型部分101失效,则紧固件107将用作主要承载部件。可以使用#10号紧固件或其
electro-mechanical braking system)”的美国专利申请公开文献no.2019/0192364中限定和描述的多种位置,该文献被通过引用结合到本文中。连杆机构66被联接到制动件62,使得电动连杆94的旋转致使连杆机构66操作制动件62,以将制动件62置于制动状态或释放状态,或将转向锁定机构置于转向锁定状态。
72.仍然参考图11,在所示实施例中,电制动组件70包括传感器组件125,其被配置成感测驱动构件106的位置。在一个版本中,传感器组件125包括一对磁体m1、m2,其被固定于驱动轴122(该驱动轴122由马达120直接驱动或通过齿轮系驱动)。传感器组件125还包括传感器s1,例如霍尔效应传感器。磁体m1、m2通常被定位成围绕驱动轴122偏移90度(旋转角)。磁体m1、m2被固定到驱动轴122,使得驱动轴122的旋转使磁体m1、m2相对于传感器s1旋转。传感器s1被相对于底座34固定(例如,在固定于底座34的传感器壳体中),以便以非接触的方式感测磁体m1、m2的移动。传感器s1和单个磁体m3也可被如图11a所示布置。还设想到其他布置结构。控制器202被联接到传感器s1,以通过从传感器s1接收变化的电压信号的控制器202来确定驱动轴122的位置。例如,传感器s1被设置为当驱动构件106处于原始位置时,产生特定的电压或电压范围,并且控制器202可以由此存储该范围,以用于稍后驱动该驱动轴122到达原始位置。控制器202可因此监测来自传感器s1的输出以确定驱动构件106的位置。
73.控制器202被联接到马达120,以基于来自传感器s1的输入控制马达120的操作,使得马达120能够旋转该驱动轴122并根据需要移动驱动构件106以将制动件62置于制动状态、释放状态或将转向锁定机构置于转向锁定状态。还设想到了其他传感器类型,例如光学编码器、旋转霍尔效应传感器、线性霍尔效应传感器、接近传感器、拨动开关、限位开关等。例如,绝对位置编码器可被用于感测驱动轴122的旋转位置。
74.参考图12a、图12b和图13,保持器140被联接到支撑结构32。保持器140与连杆机构66配合以限制和/或引导连杆机构66的移动。例如,保持器140限制第一连杆72的纵向移动并引导第二连杆74的滑移。在所示实施例中,存在四个保持器140,但在其他实施例中可以存在更多或更少的保持器。将仅详细描述保持器140中的一个。
75.如图12a和图12b最佳所示,每个保持器140包括定位柱142。底座34包括开口144,以接收定位柱142,从而将底座34上的保持器140相对于连杆机构66定向。紧固件146将每个保持器140在与定位柱142间隔开的一位置处固定到底座34。保持器140还包括线路管理器或屏蔽件148,电缆或其他形式的导管、缆线、线路等可被放置在该线路管理器或屏蔽件148的下方以用于引导/管理这些线路。
76.如图13中最佳所示,每个保持器140包括止动件150以接合第一连杆72的一端,从而限制第一连杆72的移动。每个保持器140还包括引导件152以接收第二连杆74,从而限制和引导第二连杆74的移动。止动件150包括壁154,该壁154被布置成通过为第一连杆72提供邻接部来限制第一连杆72的纵向移动。引导件152限定凹口156以接收第二连杆74并允许第二连杆74在凹口156中相对于保持器140的滑移。联接连杆90的扇形齿轮98将第一连杆72操作性地联接到第二连杆74,并且凹口156被成形和布置成接收联接连杆90,并在连杆机构66的操作期间,允许扇形齿轮98在凹口156内移动。
77.在所示的实施例中,每个保持器140包括被固定到底座34的整体结构。在一些版本中,止动件150和引导件152被一体地形成为一块塑料材料,并且保持器140可被通过注塑成
型形成。保持器140可以由其他材料形成。引导件152被成形为具有顶壁和侧壁,它们形成凹口156以横跨第二连杆74,同时仍允许扇形齿轮98旋转。保持器140还包含具有轮廓的凹穴157(参见图12b)以接收第一连杆72。在一些版本中,第一连杆72可在底座34的脚轮壳体ch(参见图13)中自由地纵向滑动,由此在每一端的止动件150限制这种滑动并防止第一连杆72从联接连杆90的扇形齿轮98掉出。每个保持器140被配置成在发生碰撞时与底座34完全压缩。底座34可以在头端和脚端中的每一个处包括缓冲器160。缓冲器160被定位成保护保持器140使其免受冲击。缓冲器160可以由金属片或其他适用的材料形成。
78.如图14和图15所示,脚轮60中的每一个都包括脚轮杆162,脚轮杆162被联接到多个轮子58中的一个(或用于双轮脚轮的多个轮子)。脚轮杆162包括非圆形接口164,并且缓冲器160包括配合开口166,这些配合开口166被成形为接收脚轮杆162的非圆形接口164并限制脚轮杆162相对于缓冲器160的旋转。缓冲器160可以在开口166处被加强(例如,加厚、加肋等)以进一步支撑脚轮杆162。在一些版本中,非圆形接口164包括在脚轮杆162的底部处的八角形特征,其配合到缓冲器160中的相应的八角形开口中,以防止脚轮杆162相对于底座34旋转。其他旋转限制形状也是可能的。
79.参考图16和图17,连杆支撑件170被安装到底座34以可旋转地支撑第一连杆72(每个第一连杆72一个)。这有助于防止第一连杆72下垂以及其靠在底座34上的咔哒声,因为第一连杆72从患者转运设备30的一端纵向跨越到另一端。每个连杆支撑件170可以由单件塑料形成并且被成形为捕获住第一连杆72并将第一连杆72与底座34间隔开。连杆支撑件170可以具有接收部分172和附接部分174。接收部分172是c形的并且基本上围绕第一连杆72的外周边。接收部分172还可以具有捕获凸片173,其在接收部分172被装配到第一连杆72时挠曲并防止第一连杆72从接收部分172中轻易地弹出。附接部分174可具有紧固件(例如,圣诞树连接器、螺钉、销钉、夹子或其他适用的紧固件)以经由底座框架35中的一个或多个开口附接于底座34。
80.参考图18,在所示实施例中,患者转运设备30包括控制系统200以控制机电制动系统64的操作。控制系统200包括控制器202,其具有一个或多个微处理器、微控制器、现场可编程门阵列、片上系统、分立电路和/或能够执行本文所述功能的其他适用的硬件、软件或固件。控制器202可被机载在患者转运设备30上或者可以被远程定位。在一个实施例中,控制器202被安装于底座34。在其他实施例中,控制器202被安装于竖板54。电动制动组件70和/或控制器202的电源可以由电池电源和/或外部电源提供。控制器202被以允许控制器202控制致动器组件108(图18中示意性示出的连接)的方式联接到电制动组件70。控制器202可以经由有线或无线连接与致动器组件108通信以执行多种预期功能之一。
81.控制系统200还包括被联接到控制器202的位置传感器204,其对连杆机构66的操作作出响应以确定连杆机构66的当前状态。位置传感器204可被安装于制动件62,用于感测制动件62的位置。位置传感器204也可被联接到致动器组件108并且被配置成测量马达120的旋转。位置传感器204也可被安装到手动致动轴100和/或制动踏板102,以确定制动踏板102的位置并将这些位置与制动状态、释放状态或转向锁定状态相关联。在图19和图21中所示的版本中,位置传感器204包括一对限位开关206a、206b,它们被安装到被固定于底座34的电路板208。
82.大致参考图19-24,传感器致动器210被联接到连杆机构66以与连杆机构66一起在
制动状态、释放状态和/或转向锁定状态之间移动。传感器致动器210具有致动头212和接合接口214,该致动头212由支撑结构32支撑以相对于限位开关206a、206b进行滑移,该接合接口214由连杆机构66承载以与连杆机构66一起移动。在本文所示的代表性实施例中,接合接口214被实现为可滑动元件(或“滑块”),如下面更为详细描述的那样。然而,将会理解的是,设想到其他配置。接合接口214包括按钮连接器216,该按钮连接器216装配到第二连杆74中的相应凹口217中(参见图10),使得第二连杆74的滑动致使接合接口214的相应滑动。按钮连接器216具有杆和头部,该杆装配到第二连杆74中的凹口217中,该头部将杆保持在凹口217中。
83.如图19和图20所示,形成支撑结构32的一部分的缓冲器160包括缓冲器滑轨218。接合接口214限定了第一轨道220以跨越缓冲器滑轨218并沿着其骑行。电子器件外壳被固定于缓冲器160并且包括位于与缓冲器滑轨218间隔一定距离的位置处的头部滑轨219。头部滑轨219被相对于缓冲器滑轨218固定在适当位置中。致动头212限定第二轨道221以跨越该头部滑轨219并沿着其骑行。
84.传感器致动器210包括一个或多个柔性连接器222,其将致动头212和接合接口214互连,使得致动头212被柔性地连接到接合接口214,以调整致动头212和接合接口214之间的距离。更具体地,一个或多个柔性连接器222是柔性的以调节缓冲器滑轨218和头部滑轨219之间的距离,以适合于不同患者转运设备30中的制造公差。例如,可以为缓冲器160的制造明确规定较大的公差,这将导致在由同一制造商制造的不同患者转运设备10之间的缓冲器滑轨218和头部滑轨219之间的距离变化。设置一个或多个柔性连接器22以适合于这种变化。
85.在一些版本中,传感器致动器210由塑料(例如,通过注塑成型)形成并且柔性连接器222包括允许传感器致动器210挠曲的一个或多个塑料条带。例如,在图22-24所示的版本中,柔性连接器222包括从致动头212延伸到接合接口214的柔性支腿。作为选择,致动头212可被通过其他弹性构件(例如,弹簧、橡胶连接器等或任何其他适用的柔性特征)联接到接合接口214。
86.如图19和图23最佳所示,致动头212包括多个凸轮(例如,第一凸轮224a和第二凸轮224b),以接合限位开关206a的第一臂226a和限位开关206b的第二臂226b。在如图19和图21所示的释放状态(中性状态)中,第一凸轮224a接合第一臂226a以激活相关联的限位开关206a,而第二臂226b保持不与第二凸轮224b接触。当从释放(或中性)状态移动到制动状态时,接合接口214由于第二连杆74的移动而被移动,并且第一凸轮224a向右滑动而与第一臂226a脱离接触,而第二凸轮224b滑动到与第二臂226b接触以激活相关联的限位开关206b。当从释放(或中性)状态移动到转向锁定状态时,接合接口214由于第二连杆74的移动而被移动,并且第一凸轮224a向左滑动而与第一臂226a脱离接触,而第二凸轮224b继续与第二臂226b不接触。因此,限位开关206a、206b的不同激活状态使控制器202能够确定连杆机构66的当前状态。
87.在某些情况下,在组装过程中,可能难以精确定位凸轮224a、224b,使得凸轮224a、224b恰好在机电制动系统64改变状态时(例如,在制动件62被完全接合或完全释放时)接合臂226a、226b。结果,如果臂226a、226b中的一个被过早接触,即,在状态改变实际发生之前,则控制器202可能错误地检测到状态改变已经发生,否则在该状态改变实际上完成之前停
止致动器组件108的操作,从而可能地使机电制动系统64保持处于不希望的状态。为了避免不完整的状态改变,控制器202可被编程以对来自限位开关206a、206b的信号进行采样,该采样持续超过由凸轮224a、224b接触臂226a、226b的一段时间,以确保状态的完全改变,例如,完成制动件62的启动/停用。例如,在样本大小为2且频率为5ms的情况下,当第二凸轮224b最初滑动成与第二臂226b接触以激活相关联的限位开关206b时,控制器202识别该激活并继续对来自限位开关206b的信号进行10ms的采样,使得控制器202继续驱动马达120略微超过该激活点(通过读取激活信号持续更长时间)以确保机电制动系统64处于期望状态,此时马达驱动器120被停止。
88.返回参考图18,控制系统200还包括被联接到控制器202的状态指示器230。控制器202被配置成操作该状态指示器230以指示该机电制动系统64的感测状态。状态指示器230可以包括一个或多个视觉指示器、听觉指示器和/或触觉指示器以指示感测到的状态。状态指示器230可被联接到手动制动踏板102、底座34、侧向围栏44、46、48、50、床头板52或竖板54或患者转运设备30的任何部分。
89.控制系统200可以包括具有一个或多个用户输入装置232的用户界面,这些用户输入装置232由护理人员操作,并且将相应的输入信号传输到控制器202。控制器202基于该输入信号控制致动器组件108的操作。用户输入装置232可以包括能够由护理人员启动的任何装置。用户输入装置232可被配置成被以多种不同的方式启动,这些方式包括但不限于机械启动(手、脚、手指等)、免提启动(语音、脚等)等。
90.用户输入装置232还可以包括(例如通过相机)用于监测手、脚或护理人员的其他身体部位的运动的姿势感测设备、用于接收语音激活命令的麦克风、脚踏板和传感器(例如,诸如用于感测护理人员的身体部位的灯条或光束之类的红外传感器、超声波传感器等)。此外,用户输入装置232可以包括按钮/踏板,可以是物理按钮/踏板或例如通过光学投影或在触摸屏上的虚拟实现的按钮/踏板。按钮/踏板也可以是机械连接的或线控式按钮/踏板,其中,护理人员施加的力致动传感器,例如开关或电位计。应当理解,也可以使用用户输入装置232的任何组合。用户输入装置232可被定位在侧向围栏44、46、48、50、床头板52、竖板54或其他适用位置之一上。用户输入装置232也可被定位在便携式电子装置(例如,竖板54或其他适用位置之一上。用户输入装置232也可被定位在便携式电子装置(例如,或类似电子装置)上。
91.在所示实施例中,控制器202包括处理器234和存储装置236。处理器234包括任何适用的可编程电路,其可以包括一个或多个系统和微控制器、微处理器、精简指令集电路(risc)、专用集成电路(asic)、可编程逻辑电路(plc)、现场可编程门阵列(fpga)以及能够执行本文所述功能的任何其他电路。上述示例仅是示例性的,并且因此并不旨在以任何方式限制术语“处理器”的定义和/或含义。存储装置236包括计算机可读介质,例如但不限于随机存取存储器(ram)、闪存、硬盘驱动器、固态驱动器、软盘、闪存驱动器、压缩盘、数字视频盘和/或使处理器234能够存储、检索和/或执行指令和/或数据的任何适用的装置。
92.在示例性实施例中,控制器202包括马达控制模块238,其被联接到致动器组件108以控制致动器组件108的操作。马达控制模块238被配置成响应于由护理人员经由用户界面接收到的输入而执行编程代码以基于用户输入来操作该致动器组件108。此外,控制器202还包括传感器模块240,其被联接到至少一个传感器,例如传感器s1和位置传感器204。传感器模块240被配置成接收来自传感器的数据并将接收到的数据发送到马达控制模块238,以
促进操作电制动组件70。每个传感器可以连续地、周期性地或仅一次和/或以使控制器202能够如本文所述起作用的任何其他信号正时传输信号。此外,每个传感器可以以模拟形式或以数字形式传输信号。
93.控制器202还包括用户输入模块242,该用户输入模块242被配置成接收来自用户输入装置232的输入信号和/或生成和显示图像以在用户界面的一个或多个显示装置上显示。例如,用户输入模块242可以检索存储在存储装置236中的图像数据并将图像数据传输到用户界面,以使一个或多个显示装置能够将图像显示给护理人员。用户输入模块242还向状态指示器230发送信号以操作状态指示器230指示感测到的状态。
94.在电制动组件70的操作期间,当护理人员希望接合或释放制动件62时,护理人员启动一个或多个用户输入装置232。例如,如果护理人员希望制动轮子58以停止患者转运设备30的移动,则护理人员启动适当的用户输入装置232。一旦启动,控制器202将输出信号发送到致动器组件108以致使致动器组件108的相应地移动操作。同样,一个或多个用户输入装置232可被用于释放制动件62,或将机电制动系统64置于该转向锁定状态。
95.参考图25,在一些实施例中,致动器组件108通过有意地达到一个或多个扇形齿轮98的硬停止而被驱动到最大极限。该硬停止可以由扇形齿轮98提供,该扇形齿轮98与一个或多个啮合槽孔96的侧部246、248硬接触,即,与第二连杆74(其与扇形齿轮98一样,可由金属形成)的壁硬接触。例如,马达120驱动连杆机构66,直到扇形齿轮98之一抵靠其对应的啮合槽孔96的侧部246、248之一,如图25所示,即,扇形齿轮98在啮合槽孔96中没有可用的进一步的行程。这允许连杆机构66的最大移动,而在脚轮组件60内没有任何硬停止(该硬停止会另外损坏脚轮组件60)。然而,当以高速和扭矩操作时,始终使扇形齿轮98紧靠啮合槽孔96的侧部246、248硬停止可能导致对扇形齿轮98、驱动构件106或其他部件造成损坏。因此,可能希望降低马达120的运行速度和/或扭矩,但这可能会牺牲例如接合或分离制动件62的时间。因此,参考图26,在一个实施例中,控制器202可以最初以第一占空比250(例如,以占空比为95%)驱动马达120,从而使用脉冲宽度调制将连杆机构66移向期望状态之一。然而,例如,当机电制动系统64检测到连杆机构66接近制动状态(或开始进入该制动状态)时,控制器202立即开始将占空比降低到第二占空比252,例如,占空比为25%。
96.接近(或进入)制动状态可被利用位置传感器204或其他适用的传感器(例如spdt开关)来感测,该传感器可以向控制器202提供输入以相应地控制马达120。例如,限位开关206b的原始激活可以指示接近(或进入)制动状态并触发马达控制的这种变化。一旦最初感测到朝向制动状态的移动,连杆机构66就可以进一步移动以确保制动件62的完全接合。例如,控制器202可使马达120驱动额外的时间段,直到到达扇形齿轮98的硬停止位置,该额外的时间段为例如一秒或其他适用的时间。可以通过监控马达电流并检测与这种硬停止相关的电流峰值来感测该硬停止。然而,通过在到达该硬停止之前降低占空比,可以减少在最终到达硬停止时的相关电流和相应的转矩。在一些情况下,从第一占空比250减少到第二占空比252可以导致与硬停止相关的电流从约6a减少到1.5a,并且与硬停止相关的输出扭矩有效减少超过50%。
97.在前面的描述中已经讨论了若干种配置。然而,本文所讨论的配置并非旨在是穷举的或将本发明限制为任何特定形式。已经使用的术语旨在具有描述的性质而非限制性的词语的性质。鉴于上述教导,许多修改和变化是可能的,并且本发明可以以不同于具体描述
的方式予以实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1