用于规划基于导管的介入的基于计算机的方法与流程
用于规划基于导管的介入的基于计算机的方法
1.相关申请的交叉引用
2.本技术要求于2020年2月20日提交的美国专利申请no.16/796,602的优先权,该美国专利申请no.16/796,602是于2019年10月21日提交的国际申请no.pct/us2019/057295的部分继续申请,该国际申请要求于2018年10月22日提交的荷兰专利申请no.2021849的优先权。每个申请的内容在此通过引用全文并入本文。
技术领域
3.本技术涉及用于基于导管的介入的系统和方法。在一些实施例中,本技术更具体地涉及用于规划经由导管递送对象的系统和方法,诸如假体二尖瓣或左心耳封堵装置到患者心脏的经中隔递送(transseptal delivery)。
背景技术:
4.人的心脏是具有许多工作部分的复杂器官,这些工作部分对于心脏的正常功能是关键的,以提供遍及人体的血液循环。人的心脏通常由四个腔室,右心房、右心室、左心房和左心室组成。正确运行心脏的关键之一是调节通过这些腔室的血流。通过阀提供通过这些腔室和在这些腔室之间的血流的调节。例如,在右心房和右心室之间有一个房室开口。
5.三尖瓣位于该开口处,并允许血液从右心房进入右心室。当心房侧的血压大于心室侧的血压时,阀打开。当阀打开时,允许血液从右心房流入右心室。当心室侧的血压较大时,阀关闭。当阀关闭时,防止血液沿另一方向返回。
6.在健康的心脏中,血流也在左心房和左心室之间调节。这里,当左心房充满血液并且左心房内的压力增加到高于左心室的水平时,二尖瓣允许血液从左心房进入左心室。当打开时,血液沿向下的方向从左心房流入左心室,在左心室,血液被推出到身体的其余部分,作为较大循环过程的一部分。当健康的二尖瓣关闭时,两个腔室之间的血流停止,并且这种关闭防止了血流的反向。
7.不幸的是,二尖瓣并不总是正常工作。二尖瓣功能异常可导致严重的健康问题。与二尖瓣相关的一种异常是二尖瓣反流(“mr”)。二尖瓣反流是二尖瓣在左心室收缩期间不能适当关闭的病症。这使得从左心房流入左心室的血液反向流回左心房。
8.进行性二尖瓣疾病可以通过手术治疗。一种手术选择包括二尖瓣的置换,其中二尖瓣用假体二尖瓣置换,例如生物假体置换或合成置换。另一种手术选择包括修复二尖瓣。尽管由于手术的侵入性较小,二尖瓣修复通常被视为优于二尖瓣置换,但两种选择都可能需要心脏直视手术。因为二尖瓣置换和修复的许多候选者不是耐受心脏直视手术压力的良好候选者,所以在经导管二尖瓣置换(tmvr)领域中进行了研究。使用tmvr,可以使用基于导管的系统引入假体二尖瓣,从而避免了对心脏直视外科手术的需要。
9.例如,假体二尖瓣可以经由心脏底部的导管通过插入患者胸部的小切口中的导管放置在跳动的心脏内。医生使用该导管展开假体二尖瓣并将其定位,从而使其搁置在心脏的现有二尖瓣上。使用基于导管的植入技术,与心脏直视手术相关的物理创伤可被最小化,
并且更多的患者可被有效地治疗二尖瓣反流紊乱。
10.传统上,通过胸廓切开术进行tmvr,包括直接左心房和经心尖入路。然而,基于可用的假体装置(例如,假体二尖瓣)和递送系统的所需护套尺寸的减小,现在可以通过心房隔膜实现完全经皮的方法,其中通过颈静脉或更频繁地通过股静脉插入瓣膜(dvir,d.,“transseptal instead of transapical valve implantation,making mitral great again?”,于jacc:cardiovascular interventions,第9卷,第11期,2016)。
11.左心耳(laa)是左心房肌壁中的小囊。科学家还必须确定laa执行什么功能(如果有的话)。在正常心脏中,随着每个心动周期,心脏将收缩,并且血液将被挤出左心房和la,朝向左心室。然而,当患者患有心房纤维性颤动时,控制心跳的电脉冲不会以有序的方式穿过心脏。相反,许多脉冲同时开始并通过心房传播。快速和混乱的脉冲不给予心房收缩和/或有效地将血液挤入心室的时间。由于laa是一个小囊,血液聚集在那里并在laa和心房中形成凝块。当血凝块被泵出心脏时,它们会引起中风。
12.中风的风险可以通过采取血液稀释剂来减轻。然而,这些给患者带来不便、负面副作用和健康风险。一种替代方法是放置左心耳封堵器(laao)。这是一种降落伞形的装置,放置在laa的入口处以阻止任何血液流入和流出laa。植入laao装置的标准方法是通过基于经中隔导管的方法。将导管护套插入腹股沟附近的静脉中并引导穿过隔膜(将心脏的左右侧分开的肌肉壁)到达laa的开口。将该装置放置在laa的开口中。这密封了laa并防止其释放凝块。
13.存在选择假体装置和规划其期望位置的不同方法。然而,同样具有挑战性的任务是选择递送系统,因为不是所有的导管都能够遵循适于在所选位置递送可植入装置的穿过患者心脏的轨迹。
技术实现要素:
14.某些实施例提供了一种规划基于导管的介入的基于计算机的方法,该方法包括:在计算装置处获得感兴趣解剖区域的模型;在所述计算装置处确定所述感兴趣解剖区域中的入口;在所述计算装置处确定所述感兴趣解剖区域中的目标;在所述计算装置处确定从所述入口到所述目标的轨迹,所述轨迹包括多个轨迹段的序列;以及在所述计算装置处,基于所述导管能够在至少阈值内实现所述轨迹,从多个导管中选择导管。
15.某些实施例提供了一种规划基于导管的介入的基于计算机的方法,该方法包括:在计算装置处获得感兴趣解剖区域的模型;在所述计算装置处确定所述感兴趣解剖区域中的入口;在所述计算装置处确定所述感兴趣解剖区域中的目标;在所述计算装置处选择一个或多个导管;在所述计算装置处基于关于所述一个或多个导管的几何数据确定所述一个或多个导管从所述入口到所述目标的一个或多个轨迹,所述一个或多个轨迹中的每一个包括多个轨迹段的序列;以及在所述计算装置处基于所确定的一个或多个轨迹从所述一个或多个导管中选择导管。
16.某些实施例提供了一种规划基于导管的介入的基于计算机的方法,该方法包括:通过计算装置获得感兴趣解剖区域的模型;由所述计算装置确定所述感兴趣解剖区域中的入口;由所述计算装置确定所述感兴趣解剖区域中的目标;由所述计算装置确定从所述入口到所述目标的轨迹,所述轨迹包括多个轨迹段的序列,其中确定所述多个轨迹段中的第
一轨迹段包括:获得可植入装置在感兴趣解剖区域中的规划位置;以及将所述第一轨迹段确定为连接所述感兴趣解剖区域的第一特征的中心轴线上的第一点与定位的可植入装置的部署轴上的第二点并且通过所述感兴趣解剖区域的第二特征的几何中心点的线段;以及由所述计算装置基于所述导管能够在至少阈值内实现所述轨迹,从多个导管中选择导管。
17.某些实施例提供了一种规划基于导管的介入的基于计算机的方法,该方法包括:通过计算装置获得感兴趣解剖区域的模型;由所述计算装置确定所述感兴趣解剖区域中的入口;由所述计算装置确定所述感兴趣解剖区域中的目标;通过所述计算装置选择一个或多个导管;由所述计算装置基于关于所述一个或多个导管的几何数据来确定所述一个或多个导管从所述入口到所述目标的一个或多个轨迹,所述一个或多个轨迹中的每一个包括多个轨迹段的序列,其中确定所述一个或多个轨迹中的至少一个轨迹包括基于一个或多个约束来确定所述至少一个轨迹,其中所述一个或多个约束包括一个或多个操作约束,所述一个或多个操作约束至少指示所述至少一个轨迹应当穿过的所述感兴趣解剖区域内的一个或多个位置以及相对于所述至少一个轨迹应当穿过的所述一个或多个位置的一个或多个公差;以及由所述计算装置基于所确定的一个或多个轨迹从所述一个或多个导管中选择导管。
18.某些实施例提供了一种规划基于导管的介入的基于计算机的方法,该方法包括:在计算装置处获得感兴趣解剖区域的模型;在所述计算装置处确定所述感兴趣解剖区域中的入口;在所述计算装置处确定所述感兴趣解剖区域中的目标;在所述计算装置处确定从所述入口到所述目标的轨迹,所述轨迹包括参数曲线或分段参数曲线、直线段序列、或曲线和线段的组合;以及在所述计算装置处基于所述导管的预弯曲形状与所述轨迹紧密匹配,从多个导管中选择导管。
19.某些实施例提供了一种非暂态计算机可读介质,该非暂态计算机可读介质其上存储有计算机可执行指令,这些指令在由计算装置的处理器执行时使得该计算装置执行所描述的方法中的任一种。
20.某些实施例提供了一种计算装置,该计算装置包括存储器和处理器,该处理器被配置为执行所描述的方法中的任一种。
附图说明
21.图1是适于实践本文所公开的各种实施例的计算环境的一个示例的框图。
22.图2是可以根据一个或多个实施例使用的计算系统的高级系统图。
23.图3示出了心脏的示例3-d模型的视图。
24.图3a示出了包括两个受控弯曲位置的导管的示例。
25.图3b示出了表示图3a的导管的轨迹的轨迹段。
26.图3c示出了用于确定轨迹段的平面的使用。
27.图4示出了心脏的示例3-d模型的视图。
28.图5图示了示出根据某些实施例的用于规划基于导管的介入的示例性过程的流程图。
29.图6图示了示出根据某些实施例的用于规划基于导管的介入的示例性过程的流程图。
30.图7示出了根据某些实施例的心脏的示例3-d模型的视图,其中laao装置的模型处于用于确定目标轨迹的规划位置和控制点。
31.图8示出了根据某些实施例的基于图7被表示为样条的所确定的目标轨迹。
32.图9示出了根据某些实施例的基于图7的所确定的目标轨迹。
33.图10示出了根据某些实施例的具有预定义形状的导管的表面模型以及基于图7的所确定的目标轨迹。
34.图11示出了根据某些实施例的图10的导管的表面模型,被配准到基于图7的所确定的目标轨迹。
35.图12示出了根据某些实施例的将图10的导管的表面模型旋转为与基于图7的所确定的目标轨迹配准的能力。
36.图13图示了示出根据某些实施例的用于规划基于导管的介入的示例性过程的流程图。
37.图14示出了根据某些实施例的两种形式的样条。
具体实施方式
38.如上所述,选择用于经由导管递送装置的递送系统是具有挑战性的任务。例如,根据患者的解剖结构,某些导管可以或可以不用于递送装置,因为每个导管具有其自身的最大弯曲并且在距末端/彼此一定距离处具有一个或两个弯曲。这意味着可能选择不正确的导管来递送装置。因此,在过程期间,当导管在过程中不能到达正确的位置时,医疗专业人员可能需要更换导管,导致在导管实验室中过程时间增加,对工作人员和患者两者的辐射增加,以及材料浪费增加。
39.因此,本文的某些实施例提供了用于规划经由导管递送对象的系统和方法,诸如假体二尖瓣或laao装置到患者心脏的经中隔递送。在一些实施例中,该系统和方法允许基于特定患者心脏的特定解剖结构(即,患者特异性)进行这样的规划。在某些实施例中,所述系统和方法可用于查看某些导管设计(例如,对应于某些导管类型、型号和/或尺寸)是否适合患者解剖结构,并且因此是在需要部署在心脏中的位置上递送装置的选项。该系统和方法通过允许更好的导管选择来改进医学技术领域,这可以减少手术时间,导致更少的辐射,更少的材料浪费,更少的感染机会以及改善的结果。该系统和方法进一步改进了计算装置的功能,因为它提供了用于规划对象递送的特定方法,该方法降低了计算复杂度和计算周期的使用。此外,该系统和方法允许消除产生测试导管的解剖结构的物理3d打印模型的需要。所述系统和方法还可用于确定某一导管设计可在统计上用于的群体的百分比,或用于开发对群体的较大部分起作用的新导管设计。
40.在某些实施例中,所述系统和方法通过制作患者解剖结构的数字模型来操作。然后将装置的数字模型放置在患者解剖结构的数字模型中的一个或多个可能位置(例如,位置+取向(例如,角度))。例如,可植入装置的计划位置,如在装置的数字模型中,可以通过来自计算装置上的用户的输入而获得,或由计算装置基于解剖结构的数字模型自动确定。装置的数字模型可以包括装置的逼真的3d虚拟模型,可以包括程式化表示(例如,包括一个或多个原始形状,诸如圆柱体、球体、半球体等),或者可以包括抽象表示,诸如局部坐标系。装置在一个或多个可能位置处的放置可用于确定对导管的远端(例如,导管的尖端/末端插入
患者的最远点)和角度的约束。在某些实施例中,根据装置的类型,可能存在关于导管上的约束的一些公差。
41.例如,在导管上可能存在不同类型的约束。能力约束可以是第一类型的约束。例如,对导管的能力约束可以指导管可以弯曲多远,它可以达到多远,它可以沿着导管弯曲的地方等,并且与使用导管的解剖结构无关。在某些方面,对于这种能力约束没有考虑公差。相反,该系统和方法假定导管不能超过能力约束。
42.操作约束是第二类约束。例如,操作约束可以指的是在手术(procedure)/操作过程中导管应该进入解剖结构的位置,例如导管应该通过解剖结构的位置和取向。在某些方面,考虑这种操作约束的公差。例如,操作约束可以包括需要穿过卵圆窝(fossa ovalis,fo)的导管。为了规划的目的,约束还可以是导管穿过fo的中心,并且导管垂直地接近fo。然而,对于导管穿过fo的一个或多个位置(例如,偏离中心1mm或2mm,在距下腔静脉的中心线2mm内等)或导管采取的途径(例如,在fo的法向矢量的20
°
内等)可能存在公差。
43.在另外的实施例中,系统和方法然后限定一个或多个递送路径类型(例如,经中隔通过股静脉、经中隔通过锁骨下静脉等)以用于插入导管和递送装置。例如,该系统和方法可以限定导管通过的特定区域(例如,下腔静脉(ivc)、卵圆窝等)。不同区域可在导管上呈现某些操作约束(例如,位置、角度、尺寸等)。不同区域还可以具有关于导管上的约束的不同程度的公差(例如,弯曲、曲率、形状、尺寸、端点、角度等)。
44.在另外的实施例中,该系统和方法根据关于导管可以如何变形(例如,在正确位置处弯曲,最大曲率等)的约束(例如,操作和/或能力)来将一个或多个导管设计的一个或多个数字模型拟合到解剖结构的数字模型中,并且针对特定的患者解剖结构输出可以使用哪些导管设计来使用所定义的递送路径将装置放置在所定义的位置处。输出可以在计算装置的ui等上。在一些实施例中,系统和方法自动选择导管设计。
45.尽管描述了关于通过下腔静脉(ivc)进行假体二尖瓣或laao装置的经中隔递送的某些实施方案作为示例,但是本领域技术人员将容易理解,其也适用于其它方法(例如,通过上腔静脉的经中隔递送,经心尖递送)、其它基于导管的介入(例如,去除血凝块、组织矫正、组织修复等)或用于其它装置(例如,在其它解剖部分中)的递送系统等。在某些实施方案中,所述系统和方法被配置用于规划将假体瓣膜递送到患者心脏中。在一些实施例中,这可以更具体地是假体二尖瓣的递送。在一些实施例中,这可以更具体地是假体二尖瓣的经中隔递送,或甚至更具体地是经由ivc或经由上腔静脉(svc)的假体二尖瓣的经中隔递送。在某些实施方案中,所述系统和方法被配置用于规划将laao装置递送到患者心脏中。在一些实施方案中,这可以更具体地是laao装置的经中隔递送,或甚至更具体地是经由ivc或经由上腔静脉(svc)的laao装置的经中隔递送。本领域的技术人员将容易了解,本文中参考ivc描述的所有实施例也在必要的情况下适用于svc。本领域技术人员将容易地理解,在此描述的关于假体瓣膜递送的所有实施例也适用于laao装置的递送(作必要的修正),反之亦然。
46.在某些实施方案中,术语“导管(catheter)”可指用于插入患者体内以治疗疾病或进行手术的任何单组分或多组分管状系统。它可以指本领域已知的任何物体,如导引器、导引导管、递送系统、轴、护套、扩张器、诊断导管、微导管、中间导管或它们的组合。
47.在某些实施例中,本文描述的系统和方法是相对于静态的感兴趣解剖区域(例如,
对应于一个或多个解剖部分)来描述的。然而,该系统和方法也可应用于形状随时间变化的感兴趣解剖区域。例如,对于解剖区域的形状随时间的多个变化,可以重复在此描述的方法中或由在此描述的系统执行的一个或多个步骤。例如,如果感兴趣的解剖区域是心脏或心脏的一部分,则可以对心动周期的不同阶段重复一个或多个步骤,例如,一次用于收缩期,一次用于舒张期。在某些实施例中,可以选择导管,使得系统和方法适用于形状的所有变化(例如,阶段)。
48.在本文的某些实施例中,诸如临床医生、工程师、技师、医学专业人员、非医学用户等的用户可以操作计算装置来执行本文所述的方法。此外,计算装置本身可以自动地(部分地或完全地)执行这里的方法。此外,本文的系统可以指被配置为执行本文讨论的方法和技术的一个或多个计算装置和/或存储用于执行本文讨论的方法和技术的指令的一个或多个非暂态计算机可读介质。
49.本文所述的系统和方法可在包括被配置成提供各种功能的一个或多个计算装置的计算环境中实现。图1是适于实现本文所述的某些实施例的计算机环境100的示例。计算机环境100可以包括网络101。网络101可以采用各种形式。例如,网络101可以是安装在手术部位的局域网。在一些实施例中,网络101可以是诸如因特网的广域网。在其它实施例中,网络101可以是局域网和广域网的组合。通常,网络将允许在各种计算装置之间共享安全的通信和数据。在这些计算装置中有客户端设备104。客户端设备104可以是运行诸如windows、macos、linux、chromeos或一些其它操作系统的现成操作系统的典型个人计算机设备。客户端设备104可以安装有应用软件,以允许其经由网络101与存储在计算环境100中的各种其他模块和设备上的其他软件进行交互。该应用软件可以采用能够访问远程应用服务的web浏览器的形式。备选地,应用软件可以是安装在客户端设备104的操作系统中的客户端应用程序。客户端设备104还可以采取专用计算机的形式,该专用计算机是专门设计的医学成像工作,或者甚至更具体地用于规划经由导管的对象递送,患者心脏的经中隔递送。客户端设备104还可以采取移动设备或平板计算机的形式,该移动设备或平板计算机被配置成经由网络101进行通信并且还被配置成运行一个或多个软件模块以允许用户执行在此描述的各种方法。
50.计算机环境100还可以包括数据库106。典型地,数据库106大型数据库的形式。在某些实施例中,数据库106被配置为存储关于一个或多个导管的数据。数据可以包括每个导管的标识和/或可以描述每个导管的技术能力。在某些实施例中,技术能力包括一个或多个导管特定的几何信息,例如导管的尺寸、沿着其长度的任何弯曲的位置和形状、导管操作者可以控制其弯曲的沿着其长度的位置和/或这些弯曲中的每一个的运动范围和曲率。在某些实施例中,导管特定信息可以包括导管的虚拟3d模型,诸如表面模型、表示导管中心线的3d曲线、半径或直径中的一个或多个。例如,数据库可以包括与一个或多个递送护套相关的数据,每个递送护套具有预定形状。
51.在某些实施例中,数据库106还存储关于一个或多个可植入装置的数据。数据可以包含每个可植入装置的标识。在某些实施例中,数据库106还存储兼容性数据,描述哪些可植入装置与哪些导管兼容。数据还可以包含几何信息,例如装置的形状和/或尺寸、装置的虚拟3d模型、装置的示意性表示和/或其部署轴线。
52.在某些实施例中,数据库106被配置为存储从医学成像机器(例如,扫描设备111)、
图片归档和通信系统(pacs)系统或另一种形式的文件传输接收的图像文件。例如,图像可以由用户从数据载体上载到独立模块或基于web的门户。
53.这些图像可以是dicom图像,或其它类型的图像,诸如相关解剖结构的医学图像,例如患者心脏或患者心脏的部分,或相关解剖结构的虚拟3d模型,例如患者心脏的虚拟3d模型、患者心脏的一部分的虚拟3d模型、患者心脏的血池体积虚拟3d模型或其一部分的虚拟3d模型等。在某些实施例中,可以通过任何形式的文件传输来接收虚拟3d模型。例如,虚拟3d模型可由用户从数据载体上载到独立模块或基于web的门户。在某些实施例中,客户端设备104包括解剖数据接收模块(例如,网络接口卡(nic)),其被配置为例如经由文件传输从数据库106,从医学成像机器、从pacs系统等接收关于个体患者解剖结构的数据。
54.在某些实施例中,数据库106可以是扫描设备111的一部分,或者备选地,它可以是客户端计算装置104的一部分。
55.计算机环境100还可以包括扫描设备111。扫描设备111通常可以是扫描患者以创建其解剖结构的图像的医学成像设备。在图1所示的计算环境100中,扫描设备111可以是ct扫描仪、mri设备或超声设备。然而,本领域技术人员将理解,可以实现提供可用于创建三维解剖模型的成像数据的其他扫描技术。
56.如下面将详细解释的,扫描设备111可以被配置为创建患者心脏的截面图像。在某些方面,这些图像可以存储在数据库106中,并用于创建心脏的三维模型。为此,计算环境100还可以包括图像处理模块108(例如,分割模块)。图像处理模块108可采取计算机软件、硬件或两者的组合的形式,其检索医学成像数据(例如,从数据库106)并使用2-d图像数据的堆叠来产生三维模型。图像处理模块108可以是商业上可获得的用于三维设计和建模的图像处理软件,例如materialise nv的mimics应用。然而,也可以使用其它图像处理软件。在一些实施例中,图像处理模块108可经由基于web的网络应用来提供,所述基于web的网络应用可由计算机通过网络(例如,客户端装置104)来访问。备选地,图像处理模块可以是直接安装在客户端设备104上的软件应用(例如,并且经由网络101访问数据库106)。通常,图像处理模块108可以是位于计算环境100内的、提供对图像数据的图像处理能力的软件和/或硬件的任何组合。
57.在某些实施例中,图像处理模块108允许将医学图像转换成相关解剖结构的一个或多个虚拟3d模型。该过程可以通过本领域已知的任何自动分割方法来自动化。备选地或附加地,这可以是包括阈值处理、滤波、局部掩模编辑操作、图像处理技术等的手动处理。
58.计算环境还可以包括过程规划获取模块110。过程规划获取模块110被配置为允许用户或自动地规划可植入装置的放置。过程规划获取模块110还被配置为允许用户基于存储在数据库106中的、由图像处理模块108生成的和/或由数据接收模块获取的医学图像和/或相关解剖结构的虚拟3d模型来自动地创建规划(称为过程规划)。在某些实施例中,过程规划获取模块110被配置成生成例如从存储在数据库106中的设备中选择的可植入装置的选择,以及其在患者解剖结构内的规划位置和取向。备选地或附加地,过程规划获取模块110被配置为从文件接收过程规划。与图像处理模块108一样,过程规划获取模块110可以是由一个或多个客户端设备104经由web浏览器访问的基于网络的应用。它也可以是安装到计算机的操作系统中的本机应用程序,例如客户端设备104。在其他实施例中,过程规划获取模块110可以是作为客户端/服务器实现来运行的网络应用。
59.计算环境100还可以包括界标确定模块112。界标确定模块112被配置为允许用户和/或一个或多个自动过程来确定用于规划可植入装置的递送的一个或多个解剖界标,诸如解剖特征、腔、亮度、表面、点、边缘、边界、突起、凹陷等,或导出的界标,诸如最佳拟合平面、中心线、轮廓线等。自动过程可以使用本领域已知的任何合适的特征识别算法来实现。可以在解剖结构的虚拟3d模型上和/或在医学图像上手动指示和/或自动确定界标。使用医学图像可以使得消除分割步骤以获得虚拟3d模型成为可能。然而,使用解剖结构的虚拟3d模型通常导致更精确的界标确定。在经中隔递送假体二尖瓣的情况下,这些界标可以包括以下项中的一项或多项:下腔静脉(ivc)和/或ivc的开口;ivc的开口的几何中心点;ivc的中心流入轴线;卵圆窝;卵圆窝的几何中心点;卵圆窝的中心轴线;或可植入装置的部署轴线。在laao装置经中隔递送的情况下,界标可以包括以下项的一项或多项:下腔静脉(ivc)和/或ivc的开口;ivc的开口的几何中心点;ivc的中心流入轴线;卵圆窝;卵圆窝的几何中心点;卵圆窝的中心轴线;laa的心门;laa的心门的几何中心点;laa的中心线;或可植入装置的部署轴线。
60.ivc可以被指示、自动确定和/或存储为3d管状形状,例如圆柱体,最适合ivc最靠近右心房的部分。
61.ivc的开口可以被指示、自动确定和/或存储为沿其边缘的3d点的集合(例如,被识别为ivc和右心房之间的最高曲率的区域)、3d多折线或3d样条曲线。
62.ivc的开口的几何中心点可以被指示、自动确定和/或存储为表示ivc的开口的任何3d表示的重心的3d点。
63.ivc的中心流入轴线可以被指示、自动确定和/或存储为在右心房的开口处与ivc的中心纵向轴线相切的3d线。
64.卵圆窝可以被指示、自动确定和/或存储为3d点的集合、沿其边缘的3d折线或3d样条曲线、3d表面或3d体积。
65.卵圆窝的几何中心点可以被指示、自动确定和/或存储为表示卵圆窝的任何3d表示的重心的3d点。
66.卵圆窝的中心轴线可以被指示、自动确定和/或存储为穿过卵圆窝的几何中心点的3d线,其垂直于穿过卵圆窝的3d表示的最佳拟合平面。
67.laa的心门可以被指示、自动确定和/或存储为3d点、3d折线或3d样条曲线的集合(例如,被识别为右心房和laa之间的最高曲率区域)。
68.laa的心门的几何中心点可以被指示、自动确定和/或存储为表示laa的心门的任何3d表示的重心的3d点。
69.laa的中心线可以被指示、自动确定和/或存储为沿laa内腔中心纵向延伸的3d点、3d折线或3d样条曲线的集合。
70.在某些实施方案中,可植入装置的部署轴线是将可植入装置放置在根据过程规划的位置和取向的优选递送轴线。例如,可植入装置可以在过程规划中表示为相对于解剖结构在空间中具有特定位置和取向的圆柱体。然后将可植入装置的部署轴线确定为沿该圆柱体的中心轴线延伸的3d线。例如,可植入装置可以在过程规划中表示为装置的虚拟3d模型,该虚拟3d模型相对于解剖结构在空间中具有特定的位置和取向。可植入装置的部署轴线可以作为相对于所述虚拟3d模型具有固定位置的3d线或向量而给出。在某些实施例中,可从
数据库106检索可植入装置的部署轴线相对于可植入装置的位置的位置。
71.其他介入可能需要一组不同的解剖界标。
72.与图像处理模块108一样,界标确定模块112可以是由一个或多个客户端设备104经由web浏览器访问的基于网络的应用。它也可以是安装到诸如客户端设备104等计算机的操作系统中的本机应用程序。在其他实施例中,界标确定模块112可以是作为客户端/服务器实现来运行的网络应用。
73.计算环境100还可以包括执行规划模块114。执行规划模块114被配置成允许规划递送轨迹。递送轨迹是导管应遵循通过患者解剖结构的轨迹或轨迹的一部分。执行规划模块114可以允许在不同的途径之间进行选择,或者可以允许用户比较不同的途径(例如,经心尖的、经中隔的经股动脉、经中隔的经锁骨下动脉等)。例如,执行规划模块114可以允许规划可植入装置从ivc通过患者心脏到其规划位置和取向的递送。执行规划模块114可以是全自动模块、手动模块或半自动模块。
74.在某些实施例中,执行规划模块114将由界标确定模块112确定的一个或多个界标作为输入。
75.在某些实施例中,执行规划模块114允许用户选择或可以自动确定一个或多个公差。这些公差表示导管轨迹(递送轨迹)可能偏离理想轨迹的程度。例如,一个这样的公差可以表示导管的最远端部分的方向可以偏离可植入装置在其规划位置的部署轴线的方向到什么程度。可以基于介入的类型、装置的类型、患者的医疗状况等来选择公差。
76.在某些实施例中,递送轨迹可以包括多个连续的线段。例如,递送轨迹可以包括在ivc处开始并在可植入装置的规划位置处结束的多个连续线段。
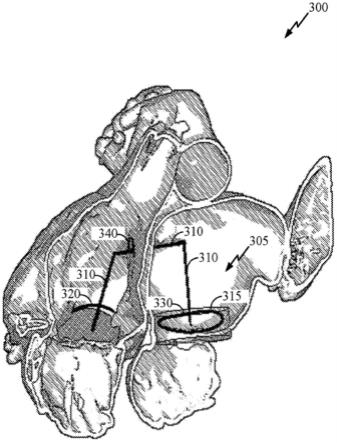
77.在某些实施例中,线段的数目由所选导管的能力确定。许多导管沿其长度具有两个受控弯曲位置。因此,它们仅能够执行包括最多三个线段的轨迹:一个在第一弯曲之前,一个在弯曲之间,一个在第二弯曲之后。具有更多受控弯曲位置的导管可以执行包括更多数目的线段的轨迹。图3和图4示出了患者心脏300的图像。示出了包括多个线段310和可植入装置315的规划位置的递送轨迹305。应当注意,尽管某些实施例描述了输出递送轨迹的示意性表示,但是在某些实施例中,系统和方法可以输出(例如,在计算装置的显示器上)患者解剖结构中的导管的模型,其对应于过程和/或递送轨迹。在其它实施例中,选择线段的数目以适合规划的过程和轨迹必须通过的解剖区域。
78.应当理解,尽管本文使用直线段作为形成递送轨迹来描述某些实施例,但是具有控制点的曲线(例如,参数曲线或分段参数曲线,诸如样条曲线、b
é
zier曲线等)可另外或替代地用于形成递送轨迹。例如,递送轨迹可以形成为具有控制点的一条或多条曲线,以调节一条或多条曲线中的每条曲线的曲率。递送轨迹也可以形成为一个或多个曲线和一个或多个线段的组合。例如,线段可以由模仿导管弯曲的曲线分开。在曲线和/或线段的任何组合中,系统可以在连续段之间实施一阶、二阶或三阶连续性。术语轨迹段可用于指所讨论的线段和/或这样的曲线。
79.例如,图3示出了患者心脏300的虚拟3d模型,示出了穿过患者心脏的切面,揭示了心房和心室。在左侧是右心房中的ivc的开口,由圆圈320(大部分被遮蔽)表示。右边是由3d样条330表示的二尖瓣环。假体二尖瓣315的规划位置通过圆柱体表示。规划位置可以由用户在计算装置上选择(例如,使用输入设备来定义期望位置)、由计算装置基于患者心脏300
的虚拟3d模型自动确定等。卵圆窝的轮廓也通过3d样条340来指示。用于递送假体二尖瓣的导管的轨迹305表示为在节点处具有小球形柄的三个轨迹段310的序列。在某些方面,用户可以通过操纵手柄来修改轨迹305。轨迹段310的序列可以表示本文所述的任何轨迹(例如,优选轨迹、导管特定的最佳轨迹、导管的最佳匹配轨迹、任何导管的轨迹)。图4类似地示出了患者心脏300的虚拟3d模型。
80.在某些实施例中,规划递送轨迹可以包括确定轨迹段的数目以及多个轨迹段中的每一个的长度、位置、曲率和/或方向,并且从设备数据库中选择能够执行递送轨迹的一个或多个导管。在涉及包括受控弯曲位置的导管(例如用于放置导丝的导管)的实施例与涉及具有预定三维形状的导管(例如装置递送护套)的实施例之间可以作出区别。(a)具有受控弯曲位置的导管
81.在导管包括受控弯曲位置的某些实施例中,导管是否能够执行给定递送轨迹部分地取决于以下三个标准中的一个或多个(例如,使用上述公差来应用):
82.1)轨迹段的数目不得超过导管的受控弯曲位置数目+1。
83.2)根据导管的设计,在受控弯曲的连续位置之间可以有固定的或最大的距离。该距离可以对相应轨迹段的长度设置限制。同样根据导管的设计,受控弯曲的两个连续位置之间的距离和对应轨迹段的长度之间的关系可以取决于弯曲角度、弯曲的长度和/或在受控弯曲的一个或两个位置处的曲率。
84.例如,图3a示出了包括受控弯曲的两个位置355的导管350的示例。此外,图3b示出了表示导管350的轨迹305的轨迹段310。在某些方面,如图所示,每个线段310的长度取决于位置355处的相邻弯曲的曲率。例如,假设每个弯曲可以近似为圆的一段,对应线段的长度可以计算为:
[0085][0086]
其中l1和l2是限定直线部分的导管的弯曲部分的长度,并且α1和α2是这些部分弯曲的相应角度。
[0087]
在其他方面,代替基于位置355处的相邻弯曲的曲率来计算轨迹段310的长度,可以使用弧来表示位置355处的弯曲,并且使用线段来表示导管350在弧之间的直线部分。
[0088]
3)根据导管的设计,可能存在可实现的扭转(例如,在受控弯曲的连续位置之间围绕纵向轴线的扭转)和弯曲(例如,在包括纵向轴线的平面中在受控弯曲的位置处弯曲)角度的限制。这些最大扭曲和弯曲角度可以对两个或更多个连续轨迹段的角度自由度设置限制。
[0089]
在某些实施例中,确定递送轨迹和选择一个或多个合适的导管可以遵循轨迹优先或导管优先的途径。
[0090]
在某些实施例中,轨迹优先途径包括以下三个步骤:
[0091]
1)首先(例如,由执行规划模块114的用户或由执行规划模块114自动地)选择多个轨迹段。在一些实施例中,该数目可以固定为3。其它实施例可以允许自由选择2个或更多。其他实施例可以基于哪些导管可用(例如,基于数据库106中的数据)以及它们具有多少受控弯曲位置来确定数目。在某些实施例中,如果兼容性信息在设备数据库106中可用,则这些实施例可以仅考虑与由过程规划获取模块110选择的可植入装置兼容的那些导管。应当
注意,可植入装置的选择可以指可植入装置的不同类型、型号和/或尺寸的选择。
[0092]
2)在下一步骤中,(例如,由执行规划模块114的用户或由执行规划模块114自动地)确定目标轨迹,例如轨迹段的优选序列。在理想情况下,轨迹段中的每一个符合一个或多个要求。例如,第一轨迹段可以在ivc处开始并且可以理想地与ivc的中心流入轴线重合,即,它在右心房中的ivc的开口的中心处具有一个端点并且在该点处具有与ivc的中心纵向轴线相切的方向。例如,第二轨迹段可以理想地在卵圆窝的几何中心点处穿过卵圆窝,并且可以理想地平行于卵圆窝的中心轴线。例如,第三轨迹段可以终止于可植入装置的规划位置,并且可以理想地平行于可植入装置的部署轴线。例如,除了第二轨迹段贯穿卵圆窝的部分之外,所有轨迹段应该完全包含在心脏的血池体积内。在典型情况下,不可能协调所有这些要求。执行规划模块114因此可以被配置成(例如,自动地)基于这些要求可以被放松的优先顺序和/或这些要求可以被放松的程度来确定轨迹段的优选顺序。例如,执行规划模块114可以保持第三轨迹段的端点和方向固定。可以优先地首先放宽第二轨迹段平行于卵圆窝的中心轴线的要求,可选地在预定的角度范围内。然后可以优先放宽通过卵圆窝的几何中心点的第二轨迹段的要求,可选地在预定的距离范围内。接下来,可以优先放宽第一轨迹段平行于ivc流入轴线的要求,可选地在预定角度范围内。接下来,可以优先放宽第一轨迹段的要求,该第一轨迹段的起点在ivc的开口的中心,可选地在预定距离范围内。可以放宽需求直到找到解决方案。执行规划模块114可以使用启发式方法。备选地,执行规划模块114可以搜索优化特定目标函数的轨迹段序列,例如最小化需要放松多远的加权平均的序列,或者最小化连续轨迹段之间的角度的序列。可以使用本领域中已知的任何合适的优化技术来通过执行规划模块114优化目标函数。固定和放松要求的其它优先级或组合也是可能的。例如,除了第二轨迹段平行于卵圆窝的中心轴线之外,执行规划模块114可以保持所有要求固定。如图3c所示,然后可以将第二轨迹段确定为这样的轨迹段,该轨迹段将由圆柱体表示的ivc322的中心流入轴线上的点与由圆柱体表示的可植入装置315的部署轴线上的点连接,并且穿过由节点表示的卵圆窝的几何中心点370。通过构建穿过ivc 322的中心流入轴线和卵圆窝的几何中心点370的平面372,然后确定可植入装置315的部署轴线与该平面372相交的点374,然后创建穿过该点374和卵圆窝的几何中心点370的线,然后确定该线与ivc的中心流入轴线相交的点376,然后创建连接交点374和376两者的轨迹段,可以确定该轨迹段。备选地,可通过构建穿过可植入装置315的部署轴线和卵圆窝的几何中心点370的平面378,然后确定卵圆窝322的中心流入轴线与该平面378相交的点376,然后创建穿过该点376和卵圆窝的几何中心点370的线,然后确定该线与可植入装置315的部署轴线相交的点374,然后创建连接交点374和376两者的轨迹段,来确定该轨迹段。备选地,通过构建穿过ivc322的中心流入轴线和卵圆窝的几何中心点370的第一平面372,构建穿过可植入装置315的部署轴线和卵圆窝的几何中心点370的第二平面378,确定这两个平面的相交线,并在该相交线与ivc 322的中心流入轴线和可植入装置315的部署轴线相交的点之间创建轨迹段310,可以获得相同的结果。应当注意,在某些方面,例如在权利要求中,对第一轨迹段、第二轨迹段和第三轨迹段的引用可能不对应于从进入到目标的轨迹中的轨迹段的顺序。例如,如上所述的第二轨迹段(例如,穿过隔膜的段)可以替代地被称为第一轨迹段。此外,如上所述的第一轨迹段(例如,穿过右心房的段)也可被称为第二轨迹段。此外,如上所述的第三轨迹段(例如,通过左心房的段)可以被称为第三轨迹段。
[0093]
3)一旦确定了优选轨迹,执行规划模块114就可以查阅数据库106,并为数据库中的每个导管确定它是否能够执行优选轨迹。为了确定导管是否能够执行优选轨迹,可以应用上述公差。作为输出,执行规划模块114可以递送适当导管的列表。备选地,执行规划模块114可以为数据库中的每个导管计算轨迹必须偏离优选轨迹的程度,并且将得分分配给数据库106中的每个导管,例如作为优选轨迹的对应部分与导管的最接近匹配轨迹之间的角度和/或长度差的多项式函数。多项式函数的系数可以比其它的更加惩罚某些偏差。作为输出,该模块可以递送导管列表,每个导管具有得分。如果数据库106中的兼容性信息可用,则执行规划模块114可以仅考虑与由过程规划获取模块110选择的可植入装置兼容的那些导管。
[0094]
此外,在某些方面,作为附加输出,执行规划模块114可以递送关于优选轨迹和/或导管的附加测量,诸如弯曲和fo之间的距离。
[0095]
在某些实施例中,导管优先方法包括以下四个步骤:
[0096]
1)对于数据库106中的每个导管,执行规划模块114可以基于存储在数据库106中的导管特定几何信息来确定一个或多个可能的轨迹,例如从ivc到可植入装置的规划位置。如果数据库106中的兼容性信息可用,则执行规划模块114可以仅考虑与由过程规划获取模块110选择的可植入装置兼容的那些导管。在某些实施例中,执行规划模块114可以基于导管的特性来确定用于给定导管的可能轨迹的轨迹段的类型。例如,受控弯曲的位置可占据导管的一定长度。该长度可用于更精确地计算轨迹或更精确地表示轨迹。
[0097]
2)执行规划模块114可以对照上述要求评估每个可能的轨迹。针对每个要求,可以计算轨迹与理想情况的偏差,例如作为ivc的中心流入轴线与导管的对应部分之间的角度、卵圆窝的中心轴线与导管的对应部分之间的角度、可植入装置的部署轴线与导管的对应部分之间的角度、ivc的开口的中心与导管的轴线之间的最短距离、卵圆窝的几何中心与导管与隔膜相交的点之间的距离、可植入装置的中心点与导管的最远端部分的轴线之间的距离等。当计算偏差时,执行规划模块114可以例如通过仅在距离或角度差超过对应公差时考虑上述公差。可以将目标函数定义为这些偏差的多项式函数,并且可以通过使用本领域已知的任何合适的优化算法来确定导管特定的最优轨迹。执行规划模块114可以例如基于目标函数的值为每个导管特定的最优轨迹分配得分。可以通过以下操作来对搜索空间设置限制,例如通过对计算的一个或多个偏差施加最大值,和/或通过监测整个轨迹被完全包含在右心房和左心房的血池体积内,除了穿过卵圆窝之外。
[0098]
3)在某些实施例中,不能遵循从ivc穿过卵圆窝到完全包含在血池体积内的可植入装置的规划位置的轨迹的导管可以被过滤掉。
[0099]
4)作为输出,执行规划模块114可以传送合格导管的列表,可选地每个都具有得分。
[0100]
(b)具有预定三维形状的导管
[0101]
在某些实施例中,导管可以具有预定的3d形状。更具体地,在某些实施例中,它们的最远端可呈现一个或多个预定弯曲。示例包括某些装置递送护套。在某些实施例中,这样的护套具有足够的柔性以在导线上从切口被引导到植入部位。然而,在某些实施例中,它们的预定形状具有即使在移除导丝之后也将它们保持就位并且便于正确放置装置的目的。
[0102]
在某些实施例中,确定递送轨迹和选择一个或多个合适的导管可以包括以下两个
步骤:
[0103]
1)首先,(例如,由执行规划模块114的用户或由执行规划模块114自动地)确定目标轨迹(例如,优选参数曲线、分段参数曲线或轨迹段序列)。该目标轨迹可以符合一个或多个要求。例如,目标轨迹或第一轨迹段可以在ivc处开始,并且可以与ivc的中心流入轴线相切,即,它在右心房中的ivc的开口的中心处具有一个端点,并且在该点处具有与ivc的中心纵向轴线相切的方向。例如,目标轨迹或第二轨迹段可以在卵圆窝的几何中心点处穿过卵圆窝,并且可以在穿过点处平行于卵圆窝的中心轴线。例如,目标轨迹或第三轨迹段可以终止于可植入装置的规划位置,并且可以在其端点平行于可植入装置的部署轴线。备选地,轨迹或第三轨迹段可终止于laa心门的几何中心点,并可在其端点平行于laa的中心线。例如,整个轨迹或所有轨迹段应该完全包含在心脏的血池体积内,除了指定用于穿过特定解剖特征的任何部分之外,例如第二轨迹段穿过卵圆窝的部分。目标轨迹可以基于由界标确定模块112确定的一个或多个界标来自动确定,或者可以由用户手动指示。
[0104]
图7示出了根据某些实施例的心脏的一部分的示例3-d模型700的视图,其中laao装置706的模型处于规划位置,并且节点708用于确定目标轨迹。图7示出了右心房701、左心房702、laa 703、fo 704、ivc 705的开口、laao装置706的规划部署方向707以及样条节点708a-708e。例如,如图7所示,在放置laao装置706的情况下,目标轨迹可被确定为3d样条曲线,其具有在ivc 708a的开口的几何中心点中的节点,在i/o 708b的几何中心点中的节点以及在laao装置708c的规划位置中的节点。可以使用附加的节点来控制样条曲线在这些位置中的一个或多个位置处的方向。例如,在ivc的开口的几何中心点处的样条的方向可以通过在距ivc的开口的中心点一定距离处(例如在1cm与3cm之间的距离,例如2cm)沿相反方向(即进入ivc)添加节点708d而使其基本上平行于ivc的中心流入轴线。类似地,通过在距laao装置的规划位置一定距离处(例如1cm和3cm之间的距离,例如2cm)沿部署方向添加节点708e,可使在laao装置的规划位置处的样条方向基本平行于装置的部署方向。图8示出了表示目标轨迹的所得样条709。这里的实施例可以使用一种或多种类型的参数曲线和分段参数曲线,例如样条、b
é
zier样条、b样条和/或非均匀有理b样条(nurbs),并且各种定义和实现在本领域中是已知的,如图14所示,图14示出了根据示例的两个相同的样条1400和1410。样条1400通过控制点1401a-g的序列来定义。样条1410通过节点1411a-d和控制点1412a-f的组合来限定。本领域技术人员将容易理解,可以使用这些定义中的任何定义来获得类似的结果。例如,通过在平行于进入右心房的中心流入轴线的方向上,在距ivc的开口的中心点一定距离处(例如1cm和3cm之间的距离,例如2cm)添加控制点,可以使样条在ivc的开口的几何中心点处的方向基本平行于ivc的中心流入轴线。类似的结果也可以用直线段序列、曲线序列(例如弧、参数曲线或分段参数曲线)或直线段和曲线的组合来获得。该第一步骤的结果是优选的轨迹。
[0105]
2)一旦确定了优选轨迹,执行规划模块114就可以查阅数据库106,并为数据库中的每个导管确定其预定形状与优选轨迹匹配的程度。不同的方法是可能的。例如,如果数据库106包含至少其远端部分的中心线的每个导管几何信息,则执行规划模块114可以将该中心线配准到优选轨迹上。多个第一点可以沿着中心线以规则的间隔限定,以从导管的远端开始。多个第二点可以沿着优选轨迹以相同的间隔定义,以laao装置的规划位置开始。接下来,可以通过本领域已知的任何刚性点集配准算法来配准多个第一点和第二点。备选地,如
果数据库106包含关于导管外表面和直径(或半径)的每个导管几何信息,则可以通过沿着优选轨迹扫掠具有相同直径的圆来创建虚拟管。例如,图9示出了所得到的目标轨迹902,其通过用圆扫掠样条709以产生管状表面来示出。接下来,可以将导管的表面模型配准到扫掠表面上。例如,图10示出了具有预定形状的导管1002的表面模型。例如,图11示出了与所得到的目标轨迹902配准的导管1002的表面模型。针对每个导管,执行规划模块114可以分别计算经配准的中心线或表面模型与优选轨迹或扫掠表面之间的偏差是否落在设定公差内。作为输出,执行规划模块114可以递送适当导管的列表。备选地,执行规划模块114可以基于所述偏差为数据库106中的每个导管分配得分。作为输出,该模块可以递送导管列表,每个导管具有得分。如果数据库106中的兼容性信息可用,则执行规划模块114可以仅考虑与由过程规划获取模块110选择的可植入装置兼容的那些导管。备选地或附加地,执行规划模块可以将导管的经配准的中心线或表面模型显示在如下所述的描绘上,并且允许用户可视地评估特定导管的适合性。
[0106]
此外,在某些方面,作为附加输出,执行规划模块114可以递送关于优选轨迹和/或导管的附加测量,诸如所配准的中心线与fo的中心之间的距离。
[0107]
在某些实施例中,执行规划模块114在解剖结构的视觉表示中呈现上述任何轨迹中的一个或多个(例如,目标轨迹和导管特定轨迹两者)。视觉表示可以包括存储在数据库106中、由图像处理模块108生成、和/或由数据接收模块获取的医学图像的一个或多个描绘和/或相关解剖结构的虚拟3d模型。视觉表示可以包括通过显示图像数据、体积绘制或表面绘制而实现的2d和/或3d视图的任何组合。执行规划模块114可以包括用于向用户呈现轨迹的增强现实或虚拟现实能力。执行规划模块114可以允许用户指定观看方向或者可以强加预定义的观看方向。在某些方面,如所讨论的,执行规划模块114还在可视化中呈现诸如关于优选轨迹和/或导管的附加测量,诸如弯曲和fo之间的距离。在某些方面,如所讨论的,执行规划模块114还在可视化中呈现对应于过程和/或递送轨迹的患者解剖结构中的导管的模型。
[0108]
执行规划模块114可以通过轨迹段(例如,显示为实线、虚线或点线2d线、曲线、圆柱体、管等)呈现轨迹,可选地通过节点(例如,显示为圆形、正方形、菱形、球形、立方体等)连接。在该过程的任何步骤,执行规划模块114可以允许用户交互地移动视觉表示中的节点或轨迹段。执行规划模块114可以以任何适当的方式限制该运动或使轨迹的其他部分与其一起运动(例如,使得轨迹保持包含在心房的血池体积中,除了穿过卵圆窝之外,使得轨迹总是穿过卵圆窝,使得轨迹要求不必过度放松,使得导管特定的轨迹保持在导管的能力内等)。对于具有预定形状的导管,运动的限制可以规定该形状保持恒定,即运动表示刚性变换。另外的限制是可能的。例如,执行规划模块114可以仅允许用户围绕ivc的流入轴线旋转导管的表示,或者可以将平移限制在ivc的开口的边界内。例如,图12示出了导管1002的表面模型如何围绕ivc 1202的流入轴线旋转。在某些方面,执行规划模块114可以借助于患者解剖结构中的导管的模型来呈现对应于过程和/或递送轨迹的轨迹。
[0109]
在某些实施例中,执行规划模块114允许用户选择所建议的导管中的一个。备选地,用户可以决定返回到过程规划获取模块110,以评估不同的可植入装置和/或可植入装置的不同位置和/或取向,并重新重复该过程。
[0110]
与图像处理模块108一样,执行规划模块114可以是由一个或多个客户端设备104
经由web浏览器访问的基于网络的应用。它也可以是安装到计算机的操作系统中的本机应用,例如客户端设备104。在其他实施例中,执行规划模块114可以是作为客户端/服务器实现来运行的网络应用。
[0111]
计算环境还可以包括输出模块116。在某些实施例中,可选的输出模块116被配置成将执行规划和/或过程规划输出到文件或手术中引导系统。这种引导系统可以将可植入装置的规划轨迹和/或规划位置和取向覆盖在介入期间捕获的图像上,它可以向操作导管的人提供视觉、听觉和/或力反馈,或者它可以沿着规划轨迹自动地操纵导管。输出模块116可以包括用于向用户呈现轨迹的增强现实或虚拟现实能力。执行规划可以包括关于所选择的导管的数据和/或相关解剖结构的3d数据以及导管通过解剖结构的轨迹。
[0112]
与图像处理模块108一样,输出模块116可以是由一个或多个客户端设备104经由web浏览器访问的基于网络的应用。它也可以是安装到诸如客户端设备104等计算机的操作系统中的本机应用。在其他实施例中,输出模块116可以是作为客户端/服务器实现来运行的网络应用。
[0113]
本发明的各种实施例可以使用通用和/或专用计算装置来实现。现在转到图2,示出了适于实现本发明的各个实施例的计算装置200的示例。计算机系统200通常可以采取被配置成执行根据本文所述的一个或多个实施例的各种实施例的某些过程和指令的计算机硬件的形式。计算机硬件可以是单个计算机或者可以是被配置为一起工作的多个计算机。计算装置200包括处理器202。处理器202可以是一个或多个标准个人计算机处理器,诸如由intel、高级微设备(amd)、apple或arm设计和/或分发的那些。处理器202还可以是专门为图像处理和/或分析而设计的更专用的处理器。计算装置200还可以包括显示器204。显示器204可以是标准的计算机监测器,例如众所周知的lcd监测器。显示器204还可以采取集成到计算装置的主体中的显示器的形式,例如与一体计算装置或平板计算机一样。
[0114]
计算装置200还可以包括输入/输出设备206。这些可以包括标准外围设备,例如键盘、鼠标、打印机和其它基本i/o软件和硬件。计算装置200还可以包括存储器208。存储器208可以采用各种形式。例如,存储器208可以包括易失性存储器210。易失性存储器210可以是某种形式的随机存取存储器,并且通常可以被配置为将可执行软件模块加载到存储器中,使得处理器202可以以本领域公知的方式来执行软件模块。软件模块可以存储在非易失性存储器212中。非易失性存储器212可以采取硬盘驱动器、闪存、固态硬盘驱动器或某种其他形式的非易失性存储器的形式。非易失性存储器212还可用于存储不可执行数据,诸如数据库文件等。
[0115]
计算机设备200还可以包括网络接口214。网络接口可以采取网络接口卡及其对应的软件驱动器和/或固件的形式,所述软件驱动器和/或固件被配置为向系统200提供对网络(例如因特网)的访问。网络接口卡214可以被配置为访问各种不同类型的网络,诸如以上结合图2描述的那些。例如,网络接口卡214可以被配置为访问不可公开访问的私有网络。网络接口卡214还可以被配置为使用诸如evdo、wimax或lte网络的无线数据传输技术来接入无线网络。尽管在图2中示出了单个网络接口214,但是可以存在多个网络接口卡214以便访问不同类型的网络。此外,单个网络接口卡214可以被配置为允许访问多个不同类型的网络。
[0116]
通常,图1所示的计算环境100通常可以包括一起工作以执行以下描述的各种实施
例的一个、几个或许多不同类型的计算装置200。例如,计算装置200可以对应于客户端设备104。此外,图1的模块可以对应于一个或多个计算装置200(例如,在一个或多个计算装置200上运行)。本领域技术人员将容易理解,可以实现各种不同类型的计算装置和网络配置来实现这里公开的本发明的系统和方法。
[0117]
图5示出了示出用于规划基于导管的介入的示例性过程500的流程图。应当注意,在某些实施例中,过程500是计算机实现的过程(例如,由计算环境100、计算装置200等)。此外,某些框可自动地、由计算装置的用户手动地、或部分手动地和部分自动地执行,诸如基于来自计算装置的用户的输入。
[0118]
过程500开始于框502,其中计算装置可视化(例如,显示)感兴趣的解剖区域的一个或多个描绘。例如,计算装置生成感兴趣的解剖区域的数字模型。继续,在框504,计算装置确定导管的入口。此外,在框505,计算装置确定导管的目标。继续,在框508,计算装置确定导管从入口到目标的优选轨迹。此外,在框510,计算装置基于优选轨迹生成执行规划。
[0119]
图6示出了示出用于规划基于导管的介入的示例性过程600的流程图。应当注意,在某些实施例中,过程600是计算机实现的过程(例如,由计算环境100、计算装置200等)。此外,某些框可自动地、由计算装置的用户手动地、或部分手动地和部分自动地执行,诸如基于来自计算装置的用户的输入。
[0120]
过程600开始于框602,其中计算装置可视化(例如,显示)感兴趣的解剖区域的一个或多个描绘。例如,计算装置生成感兴趣的解剖区域的数字模型。继续,在框604,计算装置确定导管的入口。进一步,在框606,计算装置确定导管的目标。继续,在框608,计算装置从数据库中选择适合/符合基于导管的介入的一个或多个导管。进一步,在框610,对于一个或多个导管中的每一个,计算装置确定从入口到目标的轨迹。此外,在框612,计算装置基于一个或多个轨迹生成执行规划。
[0121]
图13示出了示出用于规划基于导管的介入的示例性过程1300的流程图。应当注意,在某些实施例中,过程1300是计算机实现的过程(例如,由计算环境100、计算装置200等)。此外,某些框可由自动地、计算装置的用户手动地、或部分手动地和部分自动地执行,诸如基于来自计算装置的用户的输入。
[0122]
过程1300在框1302处开始,其中计算装置可视化(例如,显示)感兴趣的解剖区域的一个或多个描绘。例如,计算装置生成感兴趣的解剖区域的数字模型。
[0123]
过程1300在框1304处通过在计算装置处确定感兴趣解剖区域中的入口而继续。
[0124]
过程1300在框1306处通过在计算装置处确定感兴趣解剖区域中的目标而继续。
[0125]
过程1300在框1308处通过在计算装置处确定从入口到目标的轨迹来继续,该轨迹包括参数曲线或分段参数曲线、直线段序列、或曲线和线段的组合。
[0126]
过程1300在框1310处通过在计算装置处基于导管的预弯曲形状匹配轨迹(例如,最佳的、在阈值内等)从多个导管中选择导管来继续。
[0127]
过程1300在可选框1312处通过基于所选择的导管生成执行规划来继续。
[0128]
在一些实施例中,过程500和/或600和/或1300可以是计算机实现的方法。过程500和/或600和/或1300可以全部或部分地由计算装置、执业医师和/或非医疗用户(诸如工程师或技术人员)来执行。
[0129]
在一些实施例中,感兴趣的解剖区域可以是患者的心脏、患者的心脏的一部分、
和/或患者的心脏的血池体积或患者的心脏的一部分,诸如右心房与左心房和/或laa。
[0130]
在一些实施例中,入口可以是ivc、右心房中的ivc的开口或右心房中的ivc的开口内的点,例如其几何中心点。
[0131]
在一些实施例中,基于导管的介入可以是可植入装置的递送,并且目标可以是可植入装置在感兴趣解剖区域中的规划位置。在一些实施例中,可植入装置可以是假体二尖瓣,并且可植入装置的规划位置可以是假体二尖瓣在患者的二尖瓣内的位置和取向。在一些实施方案中,可植入装置可以是laao装置,并且可植入装置的规划位置可以是laao装置在患者的laa内的位置和取向。
[0132]
在一些实施例中,感兴趣解剖区域的一个或多个描绘可以是2d和/或3d可视化。其中,这些可以是医学图像、医学图像的体积绘制、虚拟3d模型或其组合。
[0133]
在一些实施例中,可视化一个或多个描绘(例如,框502和/或602和/或1302)包括在计算装置的屏幕上示出描绘。
[0134]
在一些实施例中,可视化感兴趣解剖区域的一个或多个描绘(例如,框502和/或602和/或1302)可以进一步包括接收关于感兴趣解剖区域的数据。数据可以采用感兴趣解剖区域的医学图像的形式,例如患者的心脏或患者心脏的部分,或感兴趣解剖区域的虚拟3d模型的医学图像的形式。可以从医学成像机器、pacs系统或另一种形式的文件传输接收医学图像。例如,图像可以由用户从数据载体上载到独立模块或基于web的门户。可以通过任何形式的文件传输来接收虚拟3d模型。例如,虚拟3d模型可由用户从数据载体上载到独立模块或基于web的门户。
[0135]
在一些实施例中,可视化感兴趣解剖区域的一个或多个描绘(例如,框502和/或602和/或1302)可以进一步包括将医学图像转换成相关解剖结构的一个或多个虚拟3d模型。该过程可以通过本领域已知的任何自动分割方法来自动化。备选地或附加地,这可以是包括阈值处理、滤波、局部掩模编辑操作、图像处理技术等的手动处理。例如,materialise的mimics软件可用于该过程。
[0136]
在一些实施例中,确定入口(例如,框504和/或604和/或1304)可以包括确定导管的轨迹进入感兴趣解剖区域的进入点。备选地或附加地,它可以包括确定进入点应该位于的感兴趣解剖区域内的区域。在一些实施例中,确定入口还可以包括确定进入方向,例如当导管进入感兴趣的解剖区域时导管的轨迹应该与其平行的方向。
[0137]
在一些实施例中,可以通过在感兴趣解剖区域的一个或多个描绘中的一个或多个上手动指示入口来确定入口。
[0138]
在一些实施例中,确定入口可以包括在关于感兴趣解剖区域的数据中识别一个或多个解剖界标。可以通过本领域已知的任何特征识别方法手动或自动地识别解剖界标。解剖界标可以是感兴趣的解剖区域中的各个点、线、曲线或区域,其可以用于定义入口。例如,右心房中的ivc的开口可以被识别为进入点应该位于其中的区域。例如,右心房中的ivc的开口的几何中心可以被识别为进入点。例如,可以识别最接近右心房的ivc部分的中心线以确定进入方向。
[0139]
在一些实施例中,确定入口还可以包括在感兴趣解剖区域的一个或多个描绘中的一个或多个中可视化该入口。这可以包括将诸如点、圆、盘、方形、菱形等视觉标记叠加到一个或多个描绘中的一个或多个上以指示单个进入点。附加地或备选地,它可以包括在一个
或多个描绘中的一个或多个上叠加视觉标记,诸如闭合折线、闭合曲线、闭合样条曲线、有色透明、半透明或不透明形状、阴影形状等,以指示适当的进入点可以位于其中的区域或范围。例如,右心房中的ivc的开口可以在右心房的血池体积的虚拟3d模型上通过围绕其外周的折线被可视化为包括所有合适的进入点的区域。进入方向可以通过将视觉标记(例如轨迹段、实线、虚线、虚线)叠加到一个或多个描绘中的一个或多个上来可视化,可选地在其端点中的一个端点处具有标记,例如箭头、点、正方形等。
[0140]
在一些实施例中,确定入口(例如,框504和/或604和/或1304)还可以包括手动编辑入口、进入点、进入区域和/或进入方向。这可以例如通过交互地移动上述任何视觉标记中的一个或一部分来实现。
[0141]
在一些实施例中,确定目标(例如,框505和/或606和/或1306)可以包括确定导管的轨迹终止的目标点。备选地或附加地,它可以包括确定目标点应该位于其中的感兴趣解剖区域内的区域。在一些实施例中,确定目标还可以包括确定目标方向,例如导管的轨迹的最后部分应该与其平行的方向。
[0142]
在一些实施例中,可以通过在感兴趣解剖区域的一个或多个描绘中的一个或多个上手动指示目标来确定目标。
[0143]
在一些实施例中,确定目标可以包括在与感兴趣解剖区域有关的数据中识别一个或多个解剖界标。可以通过本领域已知的任何特征识别方法手动或自动地识别解剖界标。解剖界标可以是感兴趣解剖区域中用于定义目标的各个点、线、曲线或区域。例如,二尖瓣环可以被识别为目标点应该位于其中的区域。例如,二尖瓣环的几何中心可以被识别为目标点。例如,可以识别最适合二尖瓣环的平面的法向量以确定目标方向。例如,laa的心门可以被识别为目标点应该位于其中的区域。例如,laa的心门的几何中心可被识别为目标点。例如,可识别laa内腔的中心线以确定目标方向。
[0144]
在一些实施例中,确定目标可以包括在感兴趣解剖区域的一个或多个描绘中的一个或多个中可视化目标。目标可以通过将诸如点、圆、盘、方形、菱形等视觉标记叠加到一个或多个描绘中的一个或多个上以指示单个点来被可视化。附加地或备选地,它可以包括将视觉标记叠加到一个或多个描绘中的一个或多个上,所述视觉标记诸如闭合折线、闭合曲线、闭合样条曲线、有色透明、半透明或不透明形状、阴影形状等,以指示适当目标可以位于其中的区域或范围。附加地或备选地,其可以包括将视觉标记(诸如轨迹段、实线、虚线、短划线)叠加到一个或多个描绘中的一个或多个上,可选地在其端点中的一个端点处具有标记(诸如箭头、点、方形等),以指示方向,导管应当沿该方向到达目标。
[0145]
在一些实施例中,确定目标还可以包括手动编辑目标。这可以例如通过交互地移动上述任何视觉标记中的一个或一部分来实现。
[0146]
附加地或备选地,在基于导管的介入是可植入装置的递送的那些情况下,可视化目标可以进一步包括可视化处于其规划位置的可植入装置。例如,假体二尖瓣可以在天然二尖瓣的虚拟3d模型中被可视化为圆柱体或假体装置的虚拟3d模型。目标点还可以通过瓣的部署轴线上的点或球体来可视化。目标方向还可以通过平行于瓣的部署轴线的线来可视化。例如,laao装置可以在laa的虚拟3d模型中被可视化为圆柱体或laao装置的虚拟3d模型。目标点还可以通过装置的部署轴线上的点或球体来可视化。目标方向还可以通过平行于装置的部署轴线的线来可视化。
[0147]
在其中基于导管的介入是可植入装置的递送的一些实施例中,确定目标可以进一步包括从文件、数据库、库、网络位置或数据载体加载和/或可视化可植入装置的虚拟3d模型。附加地或备选地,它可以包括从文件、网络位置或数据载体加载过程规划。这种过程规划可以包括关于待植入装置的数据,例如其类型、品牌和/或尺寸,以及其相对于患者解剖结构的规划位置和取向。
[0148]
在一些实施例中,确定目标还可以包括手动指定和/或编辑可植入装置的规划位置,例如其相对于患者解剖结构的位置和/或取向。这可以例如通过交互地移动可植入装置的视觉表示和/或附接到其上的一个或多个视觉标记来实现。目标点和/或目标方向可以跟随对可植入装置的规划位置做出的改变。
[0149]
在一些实施例中,用于规划基于导管的介入的过程500和/或600和/或1300还可以包括确定一个或多个局部通道的附加框(例如,在框505/606/1306之后并且在框508/608/1308之前)。附加框可以包括在与感兴趣解剖区域有关的数据中识别一个或多个解剖界标。可以通过本领域已知的任何特征识别方法手动或自动地识别解剖界标。解剖界标可以是感兴趣的解剖区域中的各个点、线、曲线或区域,其可以用于定义轨迹的局部点和/或通过方向。例如,卵圆窝的边界可以被识别为轨迹应当通过的区域的边界。例如,卵圆窝的几何中心可以被识别为轨迹应该通过的点。例如,可以识别最适合卵圆窝的平面的法向矢量,以确定轨迹应该与其局部平行的方向。
[0150]
在一些实施例中,确定局部通道可以包括在感兴趣的解剖区域的一个或多个描绘中的一个或多个中可视化它。局部通道可以通过将诸如点、圆、盘、方形、菱形等视觉标记叠加到一个或多个描绘中的一个或多个上以指示单个点来被可视化。附加地或备选地,它可以包括在一个或多个描绘的一个或多个上叠加视觉标记,诸如闭合折线、闭合曲线、闭合样条曲线、有色透明、半透明或不透明形状、阴影形状等,以指示适当的局部通道可以位于其中的区域或范围。附加地或备选地,其可以包括将视觉标记(例如轨迹段、实线、虚线、短划线)叠加到一个或多个描绘中的一个或多个上,可选地在其端点中的一个端点处具有标记(例如箭头、点、方形等),以指示当导管经过局部通道时导管应该与其平行的方向。
[0151]
在一些实施例中,确定局部通道还可以包括手动编辑局部通道。这可以例如通过交互地移动上述任何视觉标记中的一个或一部分来实现。
[0152]
在一些实施例中,确定导管从入口到目标的优选轨迹的框508可以包括:将轨迹确定为从入口到目标穿过感兴趣解剖区域的一个或多个轨迹段的序列。轨迹段的数目可以由用户自由选择,或者可以是预定数目,例如3或任何其他整数。该数目可取决于基于导管的介入的类型或可用导管的类型。例如,如果只有具有n个受控弯曲位置的导管可用,则轨迹段的数目可以被设置为n+1。
[0153]
如果所确定的入口限定单个进入点,则第一轨迹段可以具有与进入点重合或接近的起始点。如果所确定的入口定义了区域,则进入点可以是该区域内的点。如果所确定的入口还限定了进入方向,则第一轨迹段可以平行于或基本上平行于进入方向。
[0154]
如果所确定的目标限定了单个点,则最终轨迹段可以具有与目标点重合或接近目标点的端点。如果所确定的目标定义了区域,则结束点可以是该区域内的点。如果可视化目标还限定目标方向,则最终轨迹段可以平行于或基本上平行于目标方向。
[0155]
在一些实施例中,在框508中确定导管的优选轨迹包括确定轨迹段的连续序列。可
能存在一个或多个要求或约束,在理想情况下,轨迹段序列符合这些要求或约束。例如,第一轨迹段可以开始于经确定的进入点并且平行于经确定的进入方向,最终轨迹段可以结束于经确定的目标点并且平行于经确定的目标方向,并且一个或多个中间轨迹段可以穿过经识别的局部通道点和/或平行于经识别的局部通道方向。例如,第一轨迹段可以在ivc处开始并且可以理想地与ivc的中心流入轴线重合,例如,它在右心房中的ivc的开口的中央具有一个端点并且在该点处具有与ivc的中心纵向轴线相切的方向。例如,第二轨迹段可以理想地在卵圆窝的几何中心点处穿过卵圆窝,并且可以理想地平行于卵圆窝的中心轴线,例如穿过卵圆窝的几何中心并且平行于最适合卵圆窝的平面的法向矢量的轴线。例如,第三轨迹段可以终止于可植入装置的规划位置,并且可以理想地平行于可植入装置的部署轴线。例如,所有的轨迹段应该完全包含在心脏的血池体积内,除了指定用于穿过特定解剖特征的任何部分,例如第二轨迹段穿过卵圆窝的部分。
[0156]
在典型情况下,不可能协调所有这些要求。因此,确定优选轨迹可以基于这些要求可以被放松的优先次序和/或这些要求可以被放松的程度。例如,过程500可以保持最终轨迹段的端点和方向固定。可以优先地首先放宽第二轨迹段平行于卵圆窝的中心轴线的要求,可选地在预定的角度范围内。然后可以优先放宽通过卵圆窝的几何中心点的第二轨迹段的要求,可选地在预定的距离范围内。接下来,可以优先放宽第一轨迹段平行于ivc流入轴线的要求,可选地在预定角度范围内。接下来,可以优先放宽第一轨迹段的要求,该第一轨迹段的起点在ivc的开口的中心,可选地在预定距离范围内。过程500可以遵循启发式方法。备选地,过程500可以搜索优化特定目标函数的轨迹段序列,例如最小化需要放松多远的要求的加权平均的序列,或者最小化连续轨迹段之间的角度的序列。可以使用本领域已知的任何合适的优化技术来优化所选目标函数的轨迹段序列。
[0157]
固定和放松要求的其它优先级或组合也是可能的。例如,除了第二轨迹段平行于卵圆窝的中心轴线之外,过程500可以保持所有要求固定。如图3c所示,然后可以将第二轨迹段确定为下述轨迹段,该轨迹段将ivc 322的中心流入轴线上的点(表示为圆柱体)与可植入装置315的部署轴线上的点(表示为圆柱体)连接,并且穿过卵圆窝的几何中心点370。该轨迹段可以通过下述操作被确定,通过构建穿过ivc 322的中心流入轴线和卵圆窝的几何中心点370的平面372,然后确定可植入装置315的部署轴线与该平面372相交的点374,然后创建穿过该点374和卵圆窝的几何中心点370的线,然后确定该线与ivc 322的中心流入轴线相交的点376,然后创建连接交点374和376的轨迹段。备选地,可通过构建穿过可植入装置315的部署轴线和卵圆窝的几何中心点370的平面378,然后确定可植入装置322的中心流入轴与该平面378相交的点376,然后创建穿过该点376和卵圆窝的几何中心点370的线,然后确定该线与可植入装置315的部署轴线相交的点374,然后创建连接交点374和376的轨迹段,来确定该轨迹段。备选地,通过构建穿过ivc 322的中心流入轴线和卵圆窝的几何中心点370的第一平面372,构建穿过可植入装置315的部署轴线和卵圆窝的几何中心点370的第二平面378,确定这两个平面的相交线,并在点374和376之间创建轨迹段,在点374和376处该相交线与ivc 322的中心流入轴线和可植入装置315的部署轴线相交,可以获得相同的结果。
[0158]
在一些实施例中,在框508中确定导管的优选轨迹可以进一步包括在感兴趣解剖区域的一个或多个描绘中的一个或多个中可视化优选轨迹。这可以包括将视觉标记叠加到
一个或多个描绘中的一个或多个上,例如轨迹段、实线、虚线、点线、圆柱体等,用于所确定的连续轨迹段序列中的每个轨迹段。可选地,轨迹段之间的点可以被可视化为节点,例如通过叠加视觉标记在一个或多个描绘中的一个或多个上,例如圆形、方形、菱形、球形、长方体等。
[0159]
在一些实施例中,确定优选轨迹还可以包括手动编辑轨迹。这可以例如通过交互地移动上述任何视觉标记中的一个或一部分来实现。
[0160]
在一些实施例中,基于优选轨迹生成执行规划的框510可以包括:针对一个或多个导管或导管类型评估该导管是否能够实现优选轨迹或达到何种程度。这可以包括将导管的受控弯曲位置之间的距离与优选轨迹的对应轨迹段的长度进行比较,和/或将导管的连续轨迹段之间的角度与导管的受控弯曲的对应位置的运动范围进行比较。备选地或附加地,框510可以包括:为导管计算仍然在导管的能力内并且最接近优选轨迹的轨迹、计算其轨迹必须偏离优选轨迹的程度,并且可选地基于该偏离来分配得分,例如作为优选轨迹的对应部分和导管的最接近匹配轨迹之间的角度和/或长度差的多项式函数。
[0161]
在一些实施例中,框510可以包括从文件,数据库或任何种类的数据载体加载与要评估的一个或多个导管相关的数据。备选地,它可以包括对导管的通用参数模型的参数赋值,例如受控弯曲的位置数目、每个弯曲的运动范围、从远端到第一弯曲的距离、连续弯曲之间的距离等。
[0162]
在一些实施例中,评估一个或多个导管或导管类型可以包括:从数据库(例如,数据库106)检索关于一个或多个导管或导管类型的数据。这样的数据可以包括描述导管对于设想的基于导管的介入的适用性的数据。例如,如果基于导管的介入是可植入装置的递送,则数据可以描述导管与可植入装置的兼容性。数据还可以包括几何数据,例如描述沿着导管的受控弯曲位置的位置、这种受控弯曲位置之间的距离和/或这种受控弯曲位置处的运动范围的数据。在一些实施例中,评估一个或多个导管或导管类型可以包括:从导管数据库中仅选择适合于所设想的基于导管的介入的那些导管(例如,与待植入的规划装置兼容的那些导管)并且评估那些导管中的每一个。例如,评估的结果可以是合适的导管或导管类型的列表,或导管或导管类型的列表,每个具有如上所述确定的得分。
[0163]
框510可以进一步包括基于评估选择优选的导管。该选择可以由诸如医学专业人员的用户或诸如技术人员或工程师的技术熟练的用户来执行,或者可以基于预定义的标准而完全自动化。例如,可以选择具有最高或最低得分的导管。如果仅评估了一个导管,则选择优选的导管可以包括基于其评估批准或拒绝它。预定义的标准可以包括医生偏好,例如优选的供应商、优选的导管类型等。
[0164]
框510还可以包括生成执行规划。执行规划可以包括与患者、感兴趣的解剖区域、优选导管、优选轨迹、导管的最接近匹配轨迹、导管的得分等有关的数据的任何组合。执行规划可以被存储到文件中。它可以采用报告的格式。该报告可以包括用于执行基于导管的介入的指令,例如在受控弯曲的每个位置处弯曲导管多少度或者在受控弯曲的位置之间扭曲导管多少度。备选地或附加地,它可以在计算装置的显示器上被可视化。备选地或附加地,其可以用作手术中引导系统的输入。例如,术中成像系统可以配备有将关于感兴趣解剖区域的执行规划中的数据配准到术中捕获的医学图像上的功能,以便将优选轨迹或导管的最接近匹配轨迹叠加在术中图像上。例如,执行规划可以用作机器人手术设备的输入。对于
形状随时间变化的解剖部分,执行规划可以包括与形状的不同变化相关的数据,例如与心脏收缩相关的数据以及与心脏舒张相关的数据。
[0165]
在一些实施例中,从数据库中选择符合基于导管的介入的一个或多个导管的框608可以包括:查询包含关于不同导管或导管类型的数据的数据库(例如,数据库106)。该数据可以涉及以下任何一项或多项:导管品牌、类型、能力、一个或多个基于导管的介入的符合性、对一个或多个可植入装置的兼容性等。数据可以包含每个导管的标识,并且可以描述每个导管的技术能力。技术能力可以包括一个或多个导管特定的几何信息,例如导管的尺寸、沿其长度的任何曲线的位置和形状、导管操作者可以控制其弯曲的沿其长度的位置和/或这些弯曲中的每一个的运动范围和曲率。数据库还可以包含关于一个或多个可植入装置的数据。数据可以包含每个可植入装置的标识。数据库还可以包含兼容性数据,描述哪些可植入装置与哪些导管兼容。框608还可以包括基于关于所设想的基于导管的介入的信息和存储在数据库中的数据来选择一个或多个符合的导管,例如可能适合于执行所设想的介入的导管。例如,如果设想的介入是递送特定品牌和类型的可植入装置,则框608的结果可以是数据库中与给定品牌和类型的可植入装置兼容的所有导管的列表。
[0166]
在一些实施例中,对于一个或多个导管中的每一个,在一个或多个描绘中的一个或多个中确定和可选地可视化从入口到目标的轨迹的框610可以包括:基于存储在数据库中的导管专用几何信息,对于在框608中识别为符合的导管中的每一个,确定从入口到目标的一个或多个可能轨迹。
[0167]
在一些实施例中,在框610中确定导管的轨迹包括:确定轨迹段的连续序列。在理想情况下,轨迹段序列可以符合一个或多个要求。例如,第一轨迹段可以开始于所确定的进入点并且平行于所确定的进入方向,最终轨迹段可以结束于所确定的目标点并且平行于所确定的目标方向,并且一个或多个轨迹段可以穿过所识别的局部通道点和/或平行于所识别的局部通道方向。例如,第一轨迹段可以在ivc处开始并且可以理想地与ivc的中心流入轴线重合,例如,它在右心房中的ivc的开口的中央具有一个端点并且在该点处具有与ivc的中心纵向轴线相切的方向。例如,第二轨迹段可以理想地在卵圆窝的几何中心点处穿过卵圆窝,并且可以理想地平行于卵圆窝的中心轴线,例如穿过卵圆窝的几何中心并且平行于最适合卵圆窝的平面的法向矢量的轴线。例如,第三轨迹段可以终止于可植入装置的规划位置,并且可以理想地平行于可植入装置的部署轴线。例如,所有的轨迹段应该被完全包含在心脏的血池体积内,除了已经指定要穿过的任何解剖特征之外,例如第二轨迹段穿过卵圆窝的部分。
[0168]
在典型情况下,不可能协调所有这些要求。因此,一个或多个轨迹中的每一个可以对照上述要求进行评估。对于每个要求,可以计算轨迹与理想情况的偏差,例如,作为ivc的中心流入轴线与导管的对应部分之间的角度、卵圆窝的中心轴线与导管的对应部分之间的角度、可植入装置的部署轴线与导管的对应部分之间的角度、ivc的开口的中心与导管之间的最短距离、卵圆窝的几何中心与导管与隔膜相交的点之间的距离、可植入装置的中心点与导管的最远端部分的轴线之间的距离。可以将目标函数定义为这些偏差的多项式函数,并且可以通过使用本领域已知的任何合适的优化算法来确定导管特定的最优轨迹。多项式函数的系数可以比其它的更加惩罚某些偏差。可以例如基于目标函数的值为每个轨迹分配得分,并且可以基于该得分为每个合格导管选择导管特定的最优轨迹。可以使用本领域已
知的任何合适的优化技术来优化用于目标函数的导管特定的轨迹,并且得到导管特定的最优轨迹。
[0169]
可以例如通过对一个或多个计算出的偏差施加最大值,和/或通过监测整个轨迹被完全包含在右心房和左心房的血池体积内(除了指定要穿过的任何解剖特征之外),来对搜索空间设置限制。不能遵循从入口通过强加的局部通道点到被完全包含在血池体积内的目标的轨迹的导管可以被滤出。
[0170]
在一些实施例中,对于一个或多个导管中的每一个,确定从入口到目标的轨迹的框610可以进一步包括:在一个或多个描绘中的一个或多个中可视化轨迹。可以在计算装置的显示器上在感兴趣解剖区域的一个或多个描绘中的一个或多个中显示上述任何轨迹。轨迹可以通过轨迹段(例如,显示为实线、虚线或点线2d线、曲线、圆柱体或管)呈现,可选地通过节点(例如,显示为圆形、方形、菱形、球形、长方体等)连接。在一些实施例中,可以允许用户交互地移动视觉表示中的节点或轨迹段。这种移动可以以任何适当的方式被限制,或者轨迹的其他部分可以沿着其移动(例如,使得轨迹保持被包含在心房的血池体积中、使得轨迹总是穿过卵圆窝、使得导管特定的轨迹保持在导管的能力内,等等)。
[0171]
在一些实施例中,基于一个或多个轨迹生成执行规划的框612可以包括:从符合的导管的组中选择优选的导管。该选择可以由诸如医学专业人员的用户或诸如技术人员或工程师的技术熟练的用户来执行,或者可以基于预定义的标准而完全自动化。例如,可以选择具有最高得分的导管特定的最佳轨迹的导管。如果仅评估了一个导管,则选择优选的导管可以包括批准或拒绝它,例如基于其导管特定的最佳轨迹的得分。预定义的标准可以包括医生偏好,例如优选的供应商、优选的导管类型等。
[0172]
框612可以进一步包括生成执行规划。执行规划可以包括与患者、感兴趣的解剖区域、选择的导管、导管的最佳轨迹、轨迹的得分等有关的数据的任何组合。执行规划可以被存储到文件中。它可以采用报告的格式。该报告可以包括用于执行基于导管的介入的指令,例如在受控弯曲的每个位置处弯曲导管多少度或者在受控弯曲的位置之间扭曲导管多少度。备选地或附加地,它可以在计算装置的显示器上被可视化。备选地或附加地,其可以用作手术中引导系统的输入。例如,术中成像系统可以配备有将关于感兴趣解剖区域的执行规划中的数据配准到术中捕获的医学图像上的功能,以便将导管的最优轨迹叠加到术中图像上。例如,执行规划可以用作机器人手术设备的输入。对于形状随时间变化的解剖部分,执行规划可以包括与形状的不同变化相关的数据,例如与心脏收缩相关的数据以及与心脏舒张相关的数据。
[0173]
在一些实施例中,确定从入口到目标的轨迹的框1308可以包括:将轨迹确定为参数曲线或分段参数曲线,确定为一个或多个线段的序列,或者确定为经由局部通道(如果有的话)从入口到目标通过感兴趣解剖区域的曲线和线段的组合。在某些实施例中,轨迹段的数目可以由用户自由选择,或者可以是预定数目,例如1、2、3或任何其他整数。在某些实施例中,数目可取决于基于导管的介入的类型或可用导管的类型。例如,如果只有具有n个预定弯曲的导管可用,则轨迹段的数目可以被设置为n+1。
[0174]
在某些实施例中,如果所确定的入口限定单个进入点,则轨迹或其第一轨迹段可以具有与进入点重合或接近的起始点。在某些实施例中,如果所确定的入口定义了区域,则进入点可以是该区域内的点。在某些实施例中,如果所确定的入口还限定了进入方向,则轨
迹或第一轨迹段可以在其起始点平行于或基本上平行于进入方向。
[0175]
在某些实施例中,如果所确定的目标限定单个点,则轨迹或其最终轨迹段可以具有与目标点重合或接近目标点的端点。在某些实施例中,如果所确定的目标定义了区域,则端点可以是该区域内的点。在某些实施例中,如果可视化目标还定义了目标方向,则轨迹或最终轨迹段在其端点可以平行于或基本上平行于目标方向。
[0176]
在一些实施例中,确定轨迹可以包括定义从进入点通过每个局部通道点(如果有的话)到目标点的参数曲线或分段参数曲线,例如样条。确定轨迹可以进一步包括定义参数曲线或分段参数曲线,使得其平行于进入点中的进入方向,使得其平行于通过点中的通过方向,和/或使得其平行于目标点中的目标方向。
[0177]
在一些实施例中,在框1308中确定导管的优选轨迹可以进一步包括在感兴趣解剖区域的一个或多个描绘中的一个或多个中可视化优选轨迹。这可以包括将视觉标记叠加到一个或多个描绘中的一个或多个上,例如轨迹段、实线、虚线、点线、实线曲线、虚线曲线、虚线曲线、圆柱体、管等,用于优选轨迹或用于所确定的连续轨迹段序列中的每个轨迹段。可选地,轨迹段之间的点,或者在参数曲线或分段参数曲线的情况下,曲线的控制点,可以被可视化为节点,例如通过叠加视觉标记到一个或多个描绘中的一个或多个上,例如圆形、方形、菱形、球形、长方体等。
[0178]
在一些实施例中,确定优选轨迹还可以包括手动编辑轨迹。这可以例如通过交互地移动上述任何视觉标记中的一个或一部分来实现。可以以任何有意义的方式限制任何节点的移动。例如,如果入口限定了一个区域,例如右心房中的ivc的开口,则优选轨迹的第一节点的运动可以被限制为在该区域内的平移。作必要的修正,这同样适用于目标和任何局部通道。
[0179]
在一些实施例中,基于优选轨迹从多个导管中选择导管的框1310可以包括:针对一个或多个导管或导管类型评估导管的预定形状是否匹配优选轨迹或匹配程度。这可以包括将导管的预定形状配准到优选轨迹上。配准可以基于导管的中心线或该中心线的远端部分和优选轨迹,或者基于导管或其远端部分的表面模型和通过用具有与导管相同直径的圆扫掠优选轨迹而获得的管状表面。可以使用本领域已知的任何配准算法来执行配准,诸如在沿着导管中心线的多个第一点和沿着优选轨迹的多个第二点上应用的刚性点集配准算法,或者在导管和扫掠管状表面的表面模型上应用的刚性点集配准算法。该评估还可以包括计算导管形状和优选轨迹之间的偏差,并且可选地基于该偏差分配得分。
[0180]
在一些实施例中,框1310可以包括从文件、数据库或任何种类的数据载体加载与要评估的一个或多个导管相关的数据。
[0181]
在一些实施例中,评估一个或多个导管或导管类型可以包括从数据库(例如,数据库106)检索关于一个或多个导管或导管类型的数据。这样的数据可以包括描述导管对于设想的基于导管的介入的适用性的数据。例如,如果基于导管的介入是可植入装置的递送,则数据可以描述导管与可植入装置的兼容性。数据还可以包括几何数据,例如导管的表面模型、其中心线和/或其直径或半径。在一些实施例中,评估一个或多个导管或导管类型可以包括从导管数据库中仅选择适合于所设想的基于导管的介入的那些导管(例如,与待植入的规划装置兼容的那些导管)并且评估那些导管中的每一个。例如,评估的结果可以是合适的导管或导管类型的列表,或导管或导管类型的列表,每个具有如上所述确定的得分。
[0182]
在一些实施例中,该评估可以进一步包括例如借助于虚拟表面模型在感兴趣解剖区域的一个或多个描绘中使导管可视化。评估还可以包括由用户编辑导管在感兴趣的解剖区域中的位置。可以对编辑能力施加限制。例如,如果入口包括进入方向(例如,ivc的流入轴线),则仅允许围绕该进入方向的旋转。例如,如果入口包括区域(例如,ivc的开口),则仅允许在该区域内的平移或确保导管模型通过该区域的平移。
[0183]
框1310可以进一步包括基于评估选择优选的导管。该选择可以由诸如医学专业人员的用户或诸如技术人员或工程师的技术熟练的用户来执行,或者可以基于预定义的标准而完全自动化。例如,可以选择具有最高或最低得分的导管。如果仅评估了一根导管,则选择优选的导管可以包括基于其评估批准或拒绝它。在一些实施例中,基于偏差来选择导管(例如,选择具有最小偏差的导管,选择具有小于阈值偏差的导管,选择也满足另一标准(例如,材料、成本等)的具有小于阈值偏差的导管)。
[0184]
可选框1312可以包括生成执行规划。执行规划可以包括与患者、感兴趣的解剖区域、优选导管、优选轨迹、导管得分等有关的数据的任何组合。执行规划可以被存储到文件中。它可以采用报告的格式。该报告可以包括用于执行基于导管的介入的指令,例如在哪里刺穿fo。备选地或附加地,它可以在计算装置的显示器上被可视化。备选地或附加地,其可以用作手术中引导系统的输入。例如,术中成像系统可以配备有将关于感兴趣解剖区域的执行规划中的数据配准到术中捕获的医学图像上的功能,以便将优选轨迹或导管的形状叠加到术中图像上。例如,执行规划可以用作机器人手术设备的输入。对于形状随时间变化的解剖部分,执行规划可以包括与形状的不同变化相关的数据,例如与心脏收缩相关的数据和与心脏舒张相关的数据。
[0185]
在一些实施例中,在此描述的过程500和/或600和/或1300可以进一步包括选择一种或多种方法的初始框(例如,在框502/602/1302之前)。该选择框可以包括选择导管应当进入患者身体的位置以及导管应遵循什么路线到达感兴趣的解剖区域。例如,用户可以从经心尖递送、通过股动脉的经中隔递送和通过锁骨下动脉的经中隔递送的组中选择一个或多个途径。
[0186]
当用户选择多于一个方法时,可以为每个方法重复框502-510和/或602-612和/或1302-1312。这里描述的过程500和/或600和/或1300然后可以进一步包括选择优选方法的最后框(例如,在框510/612/1312之后)。该选择框可以包括比较不同方法之间的框502-510和/或602-612和/或1302-1312的结果,并选择一种方法。该选择可以自动进行,例如基于每个方法的优选导管的导管特定的最佳轨迹的得分。该选择也可以由用户,例如技术用户,诸如技术人员或工程师,例如基于相同的客观标准来进行。该选择还可以由医学专业人员进行,该医学专业人员可以考虑另外的医学顾虑。
[0187]
代替从与特定患者相关的数据开始,这里描述的系统和方法也可以应用于统计数据。各种统计模型在本领域中是已知的,例如统计形状模型、活动形状模型、活动外观模型等。这允许用户评估某一导管类型相对于更广泛患者人群的适用性。例如,用户可以使用该系统或将该方法应用于统计模型的任何示例,诸如表示平均患者的示例,或者可以调查人口的第90百分位。这可以帮助工程师设计适合大部分患者人群的导管,或者帮助开发有限数目尺寸的特定导管类型的系列。框502和/或602和/或1302然后可进一步包括例如通过选择模型的参数向量的参数值来创建统计模型的一个或多个示例。
[0188]
备选地,这里描述的系统和方法可以应用于与来自特定患者群体的多个患者相关的多个数据集。
[0189]
应当理解,关于任何一个实施例描述的任何特征可以单独使用,或者与描述的其他特征组合使用,并且还可以与任何其他实施例的一个或多个特征组合使用,或者与任何其他实施例的任何组合组合地使用。此外,在不脱离由所附权利要求限定的本发明的范围的情况下,也可以采用上面没有描述的等同物和修改。
[0190]
本文公开的方法包括用于实现所述方法的一个或多个步骤或动作。在不脱离权利要求的范围的情况下,方法步骤和/或动作可以彼此互换。换言之,除非指定了步骤或动作的特定顺序,否则可以在不脱离权利要求的范围的情况下修改特定步骤和/或动作的顺序和/或使用。此外,可以移除或添加一个或多个框/步骤。例如,在某些实施例中可以仅执行过程500和/或600和/或1300的部分。
[0191]
本文所公开的各种实施例提供计算机系统的使用以执行某些特征。本领域技术人员将容易理解,这些实施例可以使用多种不同类型的计算装置来实现,包括通用和/或专用计算系统环境或配置。适用于与上述实施例结合使用的公知的计算系统、环境和/或配置的示例可以包括但不限于个人计算机、服务器计算机、手持式或膝上型设备、多处理器系统、基于微处理器的系统、可编程消费电子产品、网络pc、小型计算机、大型计算机、包括任何上述系统或设备的分布式计算环境等。这些设备可以包括存储的指令,当这些指令由计算装置中的微处理器执行时,使计算机设备执行指定的动作以执行这些指令。如这里所使用的,指令是指用于处理系统中的信息的计算机实现的步骤。指令可以用软件、固件或硬件来实现,并且包括由系统的组件承担的任何类型的编程步骤。
[0192]
微处理器可以是任何常规的通用单芯片或多芯片微处理器,例如处理器、pro处理器、8051处理器、处理器、处理器或处理器。此外,微处理器可以是任何常规的专用微处理器,例如数字信号处理器或图形处理器。微处理器通常具有常规的地址线、常规的数据线和一个或多个常规的控制线。
[0193]
这里公开的本发明的各方面和实施例可以被实现为使用标准编程或工程技术来产生软件、固件、硬件或其任何组合的方法、装置或制品。本文所用的术语“制品”是指以硬件或非暂态计算机可读介质(例如光学存储装置)和易失性或非易失性存储器装置或暂态计算机可读介质(例如信号、载波等)实施的代码或逻辑。此类硬件可以包括(但不限于)现场可编程门阵列(fpga)、专用集成电路(asic)、复杂可编程逻辑装置(cpld)、可编程逻辑阵列(pla)、微处理器或其它类似处理装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1