一种具有电磁环境兼容性的医用冗余保护线运动搭载模块
1.本发明属于机器人技术领域,涉及模块轻量化设计及应用,具体地,涉及一种具有电磁环境兼容性的医用冗余保护线运动搭载模块。
背景技术:
2.微创是现代医学外科具有革命性进步的前沿技术,介入治疗是微创技术最典型的一类应用,主要包括有血管性介入技术,如冠状动脉造影、溶栓、支架放置等,和非血管性介入技术,如经皮穿刺活检或消融等。时至今日,该项技术既可由医生独立手工操作,亦可在机器人辅助下共同完成。随着科学技术和现代医疗水平的不断提高,机器人灵敏精细的高精度动作、高稳定性、高效率等优点,使得医疗机器人产业进入快速新兴发展阶段,加之国内外巨大的优质医疗服务缺口,展现出了广阔的市场前景和发展活力。
3.目前,经皮穿刺手术是完成取样活检、消融治疗、放射性粒子植入等临床诊断、根治或姑息所采用的主要方法,应用场合有骨科、肺、乳腺、甲状腺、前列腺等。由于人工穿刺存在成功率低、定位精度不高等问题,使得基于影像引导的机器人辅助穿刺技术成为国内外医工交叉领域的重要应用之一,也是近年来国内外面向临床需求的前沿研究热点之一。ct与mri作为当前最常见、最常用的医学影像技术,两者不仅其工作原理不同,检查侧重范围也不一样。ct是利用x射线或γ射线成像原理而形成图像,对病人或医生存在放射性危险,需采取相应的防护措施,且短期内不宜多做,而mri则对人体无辐射损伤,减轻了手术医生的身心疲劳,但共振过程中的振动也会给一些病人带来不适感;对于肺部、钙化灶等检查,ct 要优于mri,而对于乳腺、前列腺等软组织检查,mri比ct要优越,但mri对特定人群也存在不适宜,如体内留有金属物品者、危重病人等。
4.在机器人辅助穿刺手术过程中,当前的研究普遍基于ct(电子计算机断层扫描)或mri(核磁共振成像) 定位图像和电磁跟踪,通过空间几何建模和路径规划的方法对穿刺针进行导引,避开重要的组织器官,实现穿刺。例如tie
‑
feng zhang等人在《lesion positioning method of a ct
‑
guided surgical robotic system forminimally invasive percutaneous lung》提出的一种基于ct引导的六自由度经皮肺穿刺手术机器人;公开号为202010207981.2的中国专利,公开了一种用于穿刺手术机器人ct舱内三维影像重建和定位分析系统;公开号为202010659954.9的中国专利,公开了一种核磁共振下穿刺手术定位机器人;等等,均在特定对象与一定程度上,可实现穿刺作业任务及满足穿刺要求。
5.进一步,对公开文献检索发现:现有的穿刺手术机器人设计几乎都以实现功能、确保安全与提高穿刺精度为主,鲜有关注电磁兼容性问题,换言之,实践中不可避免地存在机器人系统干扰磁场或引起图片失真,如伪影等,而影像设备也会对机器人系统的动作性能造成干扰,忽视了电磁兼容性对穿刺精度的相互影响。近年来,钛合金以其优良的生物相容性,在医学领域的应用日渐突出,根据其性质,在抗电磁干扰方面具有明显的优势,但完全用于穿刺手术机器人设计,其成本高昂,制造与维护等也会带来一系列问题,仍存在一定局
限性,应用拓展效果还有待考量。
技术实现要素:
6.针对现有技术中的缺陷与不足,本发明的目的是提供一种具有电磁环境兼容性的医用冗余保护线运动搭载模块,在保证电磁环境兼容性、冗余安全可靠性、灵活可移植性和模块轻量化的同时,尽可能增加其可拓展性,以满足多种手术场合的适用性,实现多样互通与物超所值。
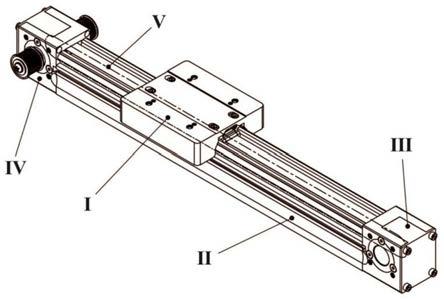
7.本发明是这样实现的:其构造特征是如图1所示,由前至后依次包括有前端组件(ⅲ)、导轨组件(ⅱ)、滑块组件(ⅰ)、后端组件(ⅳ),在前端组件(ⅲ)和后端组件(ⅳ)中分别安装有前端同步轮(19)和后端同步轮(21),通过同步带(
ⅴ
)与滑块组件(ⅰ)中的前后各一个夹紧卡扣(
ⅰ‑
2)相联结。
8.所述滑块组件(ⅰ)的构造是如图2、图3、图4、图5所示,在其滑块基体(1)上开设有四个滑轮组装配螺纹孔(d),通过尼龙内六角螺丝(2)安装有四个滑轮组(
ⅰ‑
1),滑轮组(
ⅰ‑
1)是由两个陶瓷轴承(6、6
′
)和滑轮(7)组成,轴承外径与滑轮内孔的安装方式为过盈配合,过盈量为0.1mm
‑
0.2mm,轴承内孔与尼龙内六角螺丝(2)的安装方式为间隙配合,两两滑轮(7)的外缘分别与导轨组件(ⅱ)上的玻纤杆(11、11
′
)外缘相切,构成滚动摩擦副;如图6所示,夹紧卡扣(
ⅰ‑
2)是由内卡扣(4)和外卡扣(5)组成,陶瓷内六角螺丝(8)通过内卡扣(4)上的夹紧卡扣定位光孔(e)经外卡扣(5)上的夹紧卡扣固定螺纹孔(e
′
),将同步带(
ⅴ
)的任一端固定,同步带内周齿状与外卡扣(5)上的齿状镶嵌,同步带端头需伸出外卡扣(5)为宜;陶瓷内六角螺丝(9) 通过内卡扣(4)上的螺丝杯头孔(c
′
)经滑块基体(1)上的张紧调节螺纹孔(c),将同步带(
ⅴ
)进行张紧调节;张紧后,由陶瓷内六角螺丝(3)通过滑块基体(1)上的调节槽孔(b)经外卡扣(5)上的压紧螺纹孔(b
′
),将夹紧卡扣(
ⅰ‑
2)安装固定;滑块基体(1)的上表面开设有搭载执行装置预留螺纹孔(a),用于搭载执行装置,其螺纹孔位置可根据具体的搭载执行对象而变化;其中滑块基体(1)、内卡扣(4)、外卡扣(5)、滑轮(7)等采用树脂材料3d打印而成。
9.所述的导轨组件(ⅱ)构造是如图7所示,在其导轨基体(10)的左右两侧端上开设有两个圆弧段,通过胶水分别与玻纤杆(11、11
′
)外径相切粘结,玻纤杆的前后两端头分别伸出2mm
‑
3mm,分别可伸入前端组件(ⅲ)和后端组件(ⅳ)中支撑座(14)上的总装定位孔(j),起总装配的初定位作用;导轨基体(10)的前后两端上开设有连接上螺纹孔(f)、连接下螺纹孔(g),总装过程中,使用这两种螺纹孔分别对前端组件(ⅲ)和后端组件(ⅳ)进行装配;导轨基体(10)的下表面上开设有均匀布置的搭载模块移植螺纹孔(h),用于该搭载模块向应用对象的移植固定;其中导轨基体(10)采用树脂材料3d打印而成。
10.所述的前端组件(ⅲ)构造是如图8、图10所示,由端盖(13)、支撑座(14)、封闭侧盖(16)和前端同步轮(19)组成,采用树脂材料3d打印而成;前端同步轮(19)两端安装有陶瓷轴承(17),轴承内径与前端同步轮(19)两端外径的安装方式为过盈配合,过盈量为0.1mm
‑
0.2mm,轴承外径与支撑座(14)上内孔的安装方式为间隙配合,间隙量为0.05mm
‑
0.1mm;左右两侧的封闭侧盖(16)通过陶瓷内六角沉头螺丝(15)经支撑座(14)上的侧盖固定螺纹孔(s)对陶瓷轴承(17)进行轴向限位;陶瓷内六角螺丝(18、18
′
)经支撑座(14) 上的连接上螺纹对应光孔(f
′
)、连接下螺纹对应光孔(g
′
)分别与导轨基体(10)的前端上的连接上螺纹孔
(f)、连接下螺纹孔(g)进行前端组件(ⅲ)的固定总装配;端盖(13)通过陶瓷内六角螺丝(12)与支撑座(14)固定;支撑座(14)上开设有搭载模块移植备用螺纹孔(k)以及备用防撞孔(i),其中搭载模块移植备用螺纹孔(k),用于该搭载模块向应用对象的移植固定,备用防撞孔(i)中使用橡皮塞来实现防撞。
11.所述的后端组件(ⅳ)构造是如图9、图10所示,由端盖(13)、支撑座(14)、通孔侧盖(20)、后端同步轮(21)和外接同步轮(22)组成,采用树脂材料3d打印而成;后端同步轮(21)两端安装有陶瓷轴承(17),轴承内径与后端同步轮(21)两端外径的安装方式为过盈配合,过盈量为0.1mm
‑
0.2mm,轴承外径与支撑座 (14)上内孔的安装方式为间隙配合,间隙量为0.05mm
‑
0.1mm,后端同步轮(21)左右两侧的阶梯轴端上分别安装有外接同步轮(22);外接同步轮(22)通过陶瓷螺钉(23)固定于后端同步轮(21)上,使用两个外接同步轮(22)组成冗余设计,并与后端同步轮(21)共同构成该搭载模块线运动的冗余保护;左右两侧的通孔侧盖(20)通过陶瓷内六角沉头螺丝(15)经支撑座(14)上的侧盖固定螺纹孔(s)对陶瓷轴承(17)进行轴向限位;陶瓷内六角螺丝(18、18
′
)经支撑座(14)上的连接上螺纹对应光孔(f
′
)、连接下螺纹对应光孔(g
′
)分别与导轨基体(10)的后端上的连接上螺纹孔(f)、连接下螺纹孔(g)进行后端组件(ⅳ)的固定总装配;端盖(13)通过陶瓷内六角螺丝(12)与支撑座(14)固定;支撑座(14)上开设有搭载模块移植备用螺纹孔(k)以及备用防撞孔(i),其中搭载模块移植备用螺纹孔(k),用于该搭载模块向应用对象的移植固定,备用防撞孔(i)中使用橡皮塞来实现防撞。
12.本发明优点及积极效果是:
13.①
本发明上述结构中,各零件材料均具有优良的抗电磁干扰特性,即具有电磁环境兼容性,使得该模块用于穿刺手术机器人设计时,大大减少了手术中金属吸附、伪影等干扰,消除了模块与影像设备之间的相互影响,提高了机器人本质化性能。
14.②
本发明上述结构中,各零件结构简单,可直接采用3d打印进行加工制造,成本低廉,安装便捷,可移植性高,能够灵活方便的集成于穿刺手术机器人设计中。
15.③
进一步,本发明设计的由外接同步轮构成的冗余传驱动结构,对该模块的线运动具有冗余保护作用,提高了该模块在医用情况下的可靠性和使用安全性。
16.④
进一步,本发明设计的一维线运动搭载模块,可用于并联机器人各轴的多样互通,具有明显的通用性与组合性,适用于多种手术场合下穿刺手术机器人的模块轻量化设计。
附图说明
17.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显;
18.图1为本发明结构布置总体外观示意图;
19.图2为本发明滑块组件(ⅰ)三维装配示意图;
20.图3为本发明滑块组件(ⅰ)主视半剖视图;
21.图4为图3中俯视a
‑
a截面剖视图;
22.图5为图3中左视b
‑
b截面剖视图;
23.图6为图2中夹紧卡扣(
ⅰ‑
2)示意图;
24.图7为本发明导轨组件(ⅱ)三维装配示意图;
25.图8为本发明前端组件(ⅲ)三维装配示意图;
26.图9为本发明后端组件(ⅳ)三维装配示意图;
27.图10为本发明中各同步轮结构外观示意图;
28.图中标号:
ⅰ‑
滑块组件,
ⅱ‑
导轨组件,
ⅲ‑
前端组件,
ⅳ‑
后端组件,
ⅴ‑
同步带,
ⅰ‑1‑
滑轮组,
ⅰ‑2‑
夹紧卡扣,1
‑
滑块基体,2
‑
尼龙内六角螺丝(m6*20),3
‑
陶瓷内六角螺丝(m4*6),4
‑
内卡扣,5
‑
外卡扣,6、6
′‑
陶瓷轴承(6*13*5),7
‑
滑轮,8
‑
陶瓷内六角螺丝(m3*10),9
‑
陶瓷内六角螺丝(m4*16),10
‑
导轨基体, 11、11
′‑
玻纤杆,12
‑
陶瓷内六角螺丝(m4*8),13
‑
端盖,14
‑
支撑座,15
‑
陶瓷内六角沉头螺丝(m4*12), 16
‑
封闭侧盖,17
‑
陶瓷轴承(12*28*8),18、18
′‑
陶瓷内六角螺丝(m5*25),19
‑
前端同步轮,20
‑
通孔侧盖, 21
‑
后端同步轮,22
‑
外接同步轮,23
‑
陶瓷螺钉(m4*8);a
‑
搭载执行装置预留螺纹孔,b
‑
调节槽孔,b
′‑
压紧螺纹孔,c
‑
张紧调节螺纹孔,c
′‑
螺丝杯头孔,d
‑
滑轮组装配螺纹孔,e
‑
夹紧卡扣定位光孔,e
′‑
夹紧卡扣固定螺纹孔,f
‑
连接上螺纹孔,f
′‑
连接上螺纹对应光孔,g
‑
连接下螺纹孔,g
′‑
连接下螺纹对应光孔,h
‑
搭载模块移植螺纹孔,i
‑
备用防撞孔,j
‑
总装定位孔,k
‑
搭载模块移植备用螺纹孔,s
‑
侧盖固定螺纹孔。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明进行详细说明。以下实施例将有助于本领域的工程技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
30.参照图1所示,为本发明一实施例中具有电磁环境兼容性的医用冗余保护线运动搭载模块的结构布置总体外观示意图,该搭载模块由前至后依次包括有前端组件ⅲ、导轨组件ⅱ、滑块组件ⅰ、后端组件ⅳ,在前端组件ⅲ和后端组件ⅳ中分别安装有前端同步轮19和后端同步轮21,通过同步带
ⅴ
与滑块组件ⅰ中的前后各一个夹紧卡扣
ⅰ‑
2相联结,构成了一个通用一维线运动搭载模块,可用于多医用场合下并联机器人设计的多样互通,具体总装配步骤如下:
31.参照图2、图3、图4、图5所示,首先安装滑轮组
ⅰ‑
1,由两个陶瓷轴承6、6
′
和滑轮7组成,轴承外径与滑轮内孔的安装方式为过盈配合,过盈量为0.1mm
‑
0.2mm,轴承内孔与尼龙内六角螺丝2的安装方式为间隙配合;通过尼龙内六角螺丝2经滑块基体1上的滑轮组装配螺纹孔d安装四个滑轮组
ⅰ‑
1;
32.参照图7所示,通过胶水将玻纤杆11、11
′
的外径分别相切粘结于导轨基体10的左右两侧端的两个圆弧段上,玻纤杆的前后两端头分别伸出2mm
‑
3mm,分别可伸入前端组件ⅲ和后端组件ⅳ中支撑座14上的总装定位孔j,起总装配的初定位作用;安装四个滑轮组
ⅰ‑
1,可从玻纤杆的一端顺滑装入,两两滑轮7的外缘分别与导轨组件ⅱ上的玻纤杆11、11
′
外缘相切,构成滚动摩擦副;
33.参照图8、图10所示,陶瓷内六角螺丝18、18
′
经支撑座14上的连接上螺纹对应光孔f
′
、连接下螺纹对应光孔g
′
分别与导轨基体10的前端上的连接上螺纹孔f、连接下螺纹孔g进行前端组件ⅲ的固定总装配;接着,前端同步轮19两端安装陶瓷轴承17,轴承内径与前端
同步轮19两端外径的安装方式为过盈配合,过盈量为0.1mm
‑
0.2mm,轴承外径与支撑座14上内孔的安装方式为间隙配合,间隙量为0.05mm
‑
0.1mm;左右两侧的封闭侧盖16通过陶瓷内六角沉头螺丝15经支撑座14上的侧盖固定螺纹孔s对陶瓷轴承17进行轴向限位;
34.同理,参照图9、图10所示,陶瓷内六角螺丝18、18
′
经支撑座14上的连接上螺纹对应光孔f
′
、连接下螺纹对应光孔g
′
分别与导轨基体10的后端上的连接上螺纹孔f、连接下螺纹孔g进行后端组件ⅳ的固定总装配;后端同步轮21两端安装有陶瓷轴承17,轴承内径与后端同步轮21两端外径的安装方式为过盈配合,过盈量为0.1mm
‑
0.2mm,轴承外径与支撑座14上内孔的安装方式为间隙配合,间隙量为0.05mm
‑
0.1mm;左右两侧的通孔侧盖20通过陶瓷内六角沉头螺丝15经支撑座14上的侧盖固定螺纹孔s对陶瓷轴承17进行轴向限位;
35.其次,将同步带
ⅴ
经导轨基体10,两端头分别绕过前端同步轮19和后端同步轮21;
36.参照图6所示,同步带v的两端头安装夹紧卡扣
ⅰ‑
2,由内卡扣4和外卡扣5组成,陶瓷内六角螺丝8 通过内卡扣4上的夹紧卡扣定位光孔e经外卡扣5上的夹紧卡扣固定螺纹孔e
′
,将同步带
ⅴ
的任一端固定,其同步带内周齿状与外卡扣5上的齿状镶嵌,同步带端头需伸出外卡扣5为宜;
37.再次,陶瓷内六角螺丝9通过内卡扣4上的螺丝杯头孔c
′
经滑块基体1上的张紧调节螺纹孔c,将同步带
ⅴ
进行张紧调节,张紧后,由陶瓷内六角螺丝3通过滑块基体1上的调节槽孔b经外卡扣5上的压紧螺纹孔b
′
,将夹紧卡扣
ⅰ‑
2安装固定;
38.从次,端盖13通过陶瓷内六角螺丝12与支撑座14固定;后端同步轮21左右两侧的阶梯轴端上分别安装外接同步轮22,外接同步轮22通过陶瓷螺钉23固定于后端同步轮21上,使用两个外接同步轮22组成冗余设计,并与后端同步轮21共同构成该搭载模块线运动的冗余保护;该搭载模块的滑块基体1、内卡扣4、外卡扣5、滑轮7、导轨基体10、端盖13、支撑座14、封闭侧盖16、通孔侧盖20、前端同步轮19、后端同步轮21和外接同步轮22等均采用树脂材料3d打印而成,轴承、螺丝、螺钉等为陶瓷或尼龙材料;
39.最后,滑块基体1的上表面开设有搭载执行装置预留螺纹孔a,导轨基体10的下表面上开设有均匀布置的搭载模块移植螺纹孔h,支撑座14上开设有搭载模块移植备用螺纹孔k以及备用防撞孔i,其中搭载执行装置预留螺纹孔a用于搭载执行装置,其螺纹孔位置可根据具体的搭载执行对象而变化;搭载模块移植螺纹孔h以及搭载模块移植备用螺纹孔k用于该搭载模块向应用对象的移植固定;备用防撞孔i中使用橡皮塞来实现防撞。
40.补充说明:
41.本发明上述中的外接同步轮也可采用齿轮啮合传驱动设计,具有同样的冗余保护作用;在穿刺手术机器人设计应用方面,例如可直接采用该模块构建通用空间线运动机器人,应用于电磁环境场合,或者可采用三个该搭载模块组成并联delta机器人设计,应用于基于mri引导的乳腺病灶定位与穿刺活检,等等。
42.本发明通过上述各种零部件结构优化、冗余与模块轻量化设计,具有构造简单、易于安装、成本低廉、电磁环境兼容性、冗余保护、可移植性高、通用性与组合性强等优点,能够灵活方便的集成于穿刺手术机器人设计中,提高了该模块在医用情况下的可靠性和使用安全性以及机器人本质化性能。
43.以上对本发明的具体实施进行了描述。需要理解的是,本发明并不局限于某一特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,但这并不影
响本发明的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1