电动按摩器及其基于PWM的骨骼识别方法与流程
电动按摩器及其基于pwm的骨骼识别方法
技术领域
1.本发明涉及按摩设备技术领域,具体来说涉及一种电动按摩器及其基于pwm的骨骼识别方法。
背景技术:
2.电动按摩器是指代替人工按摩用的电动器具。电动按摩器一般由微型电机或振动器通过传动装置使按摩头振动而起按摩作用,例如筋膜枪,由电机通过偏心轮传动,带动按摩头做高频往复运动,实现在人体上来回击打的按摩效果。
3.用户使用电动按摩器主要是为了放松肌肉,但电动按摩器在身体上移动来回按摩,不可避免会接触到骨骼,如果接触到骨骼,按摩头高频振动不仅会给用户带来疼痛感受,甚至还可能会造成骨骼损伤。
4.现有技术中,为了实现电动按摩器的骨骼识别,主要采用以下两种方案:一种是在电动按摩器的按摩头上增加压力传感器,通过压力传感器来检测按摩头使用过程中受到的压力,由于骨骼的硬度较大,当按摩头击打在骨骼时,压力传感器检测到的压力会变大,因此,可以通过判断压力值的变化情况,确定当前按摩的部位是否为骨骼。另一种是在电动按摩器的按摩头上增加加速度传感器,通过加速度传感器来检测按摩头使用过程中的加速度,当按摩头从非骨骼部位移动到骨骼部位时,加速度传感器检测的加速度会发生剧变,因此,可以通过判断加速度绝对值的变化情况,确定当前按摩的部位是否为骨骼。
5.但是,上述两种方案均需要将传感器设置在按摩头,使得电动按摩器机身和按摩头之间需要增加连线,这样不仅生产装配难度大,成本高,还影响电动按摩器使用寿命;此外,当用户使用电动按摩器时,如果用力较大,按摩头也会有较大的压力和加速度,因此,仅仅通过按摩头的压力值或加速度绝对值的变化是难以区分大力按摩肌肉和骨骼这两种情况的,该方法并不能准确判断当前按摩的部位是否为骨骼。
技术实现要素:
6.本发明旨在解决现有的骨骼识别需要在电动按摩器机身和按摩头之间增加连线以及骨骼识别的准确性不高的技术问题,提出一种电动按摩器及其基于pwm的骨骼识别方法。
7.本发明解决上述技术问题所采用的技术方案是:电动按摩器基于pwm的骨骼识别方法,所述电动按摩器电机的pwm脉宽值随着电动按摩器与人体接触力的变化而变化,所述方法包括以下步骤:获取电动按摩器在未接触人体时,当前档位电机的空载pwm脉宽值;根据预设周期采集电动按摩器电机的实时pwm脉宽值;根据所述实时pwm脉宽值和空载pwm脉宽值判断当前按摩部位是否为骨骼。
8.进一步地,所述电动按摩器电机的pwm脉宽值随着电动按摩器与人体接触力的变化方式包括:
若电动按摩器与人体接触力增大,则pwm脉宽值增大,若电动按摩器与人体接触力减小,则pwm脉宽值减小。
9.进一步地,根据所述实时pwm脉宽值和空载pwm脉宽值判断当前按摩部位是否为骨骼的方法包括:比较每次采集的实时pwm脉宽值和空载pwm脉宽值的大小,判断实时pwm脉宽值是否始终大于空载pwm脉宽值,若是,则判定当前按摩部位为肌肉,否则,判定当前按摩部位为骨骼。
10.进一步地,所述方法还包括:若判定当前按摩部位为骨骼,则降低电动按摩器的电机转速。
11.进一步地,所述方法还包括根据加速度判断当前按摩部位是否为骨骼的流程,当根据所述实时pwm脉宽值和空载pwm脉宽值判定当前按摩部位为骨骼,并且根据加速度判定当前按摩部位为骨骼时,才最终判定当前按摩部位为骨骼;所述根据加速度判断当前按摩部位是否为骨骼的流程包括:采集电动按摩器机身的加速度数据;对所述加速度数据进行傅立叶变换后,得到加速度数据对应的频域信号;根据所述频域信号判断当前按摩部位是否为骨骼。
12.进一步地,根据所述频域信号判断当前按摩部位是否为骨骼的方法包括:获取电动按摩器当前档位对应的电机频点幅值,判断所述频域信号中是否存在小于电机频点幅值并且大于其它任意一个频点幅值预设倍数的频点,若是,则判定当前按摩位置为肌肉,否则,判定当前按摩位置为骨骼,所述其它任意一个频点不包括电机频点。
13.进一步地,所述方法还包括:若最终判定当前按摩部位为骨骼,则降低电动按摩器的电机转速。
14.进一步地,所述方法还包括:在降低电动按摩器的电机转速达到预设时间后,恢复电动按摩器的电机转速。
15.本发明还提出一种电动按摩器,包括:电动按摩器机身以及设置在电动按摩器机身内的控制器,所述控制器采用上述电动按摩器基于pwm的骨骼识别方法判断当前按摩部位是否为骨骼。
16.进一步地,所述电动按摩器为筋膜枪。
17.本发明的有益效果是:本发明所述的电动按摩器及其基于pwm的骨骼识别方法,通过电动按摩器电机的实时pwm脉宽值来进行骨骼识别,无需设置额外的硬件装置,也无需在电动按摩器机身和按摩头之间增加连线,降低了生产装配难度和成本,提高了电动按摩器的使用寿命;并且由于是通过pwm脉宽值来进行骨骼识别,即使用户的用力大小发生较大变化,也不会对骨骼识别造成影响,进而提高了骨骼识别的准确性;此外,本发明在电动按摩器机身内设置加速度传感器后,还可以结合加速度数据对应的频域信号进行多维度的骨骼识别,进一步提高了骨骼识别的准确性。
附图说明
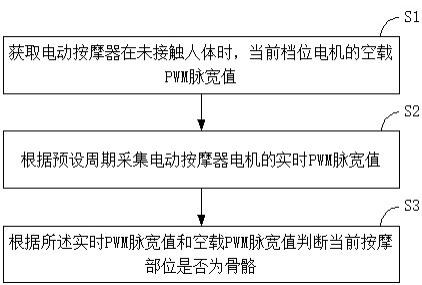
18.图1为本发明实施例所述的电动按摩器基于pwm的骨骼识别方法的流程示意图;图2为本发明实施例所述的电动按摩器击打肌肉时实时pwm脉宽值的变化示意图;
图3为本发明实施例所述的电动按摩器击打骨骼时实时pwm脉宽值的变化示意图;图4为本发明实施例所述的电动按摩器击打肌肉时加速度数据对应的时域信号示意图;图5为本发明实施例所述的电动按摩器击打肌肉时加速度数据对应的频域信号示意图;图6为本发明实施例所述的电动按摩器击打骨骼时加速度数据对应的时域信号示意图;图7为本发明实施例所述的电动按摩器击打骨骼时加速度数据对应的频域信号示意图。
具体实施方式
19.下面将结合附图对本发明的实施方式进行详细描述。
20.本发明旨在解决现有的骨骼识别需要在电动按摩器机身和按摩头之间增加连线以及骨骼识别的准确性不高的技术问题,提出一种电动按摩器及其基于pwm的骨骼识别方法,应用于pwm脉宽值随着电动按摩器与人体接触力的变化而变化的电动按摩器,主要的技术方案包括:获取电动按摩器在未接触人体时,当前档位电机的空载pwm脉宽值;根据预设周期采集电动按摩器电机的实时pwm脉宽值;根据所述实时pwm脉宽值和空载pwm脉宽值判断当前按摩部位是否为骨骼。
21.可以理解,电动按摩器由pwm脉宽值控制电机转速,pwm脉宽值越大,电机转速越高,pwm脉宽值越小,电机转速越低。当按摩头与人体接触时,电动按摩器与人体接触力变大,按摩头将受力通过传运装置传递到电机后,会造成电机转速下降,此时控制器会控制pwm脉宽值增大来使电机保持在额定转速;即当按摩头未与人体接触时,pwm脉宽值较小,当按摩头与人体接触时,pwm脉宽值较大。当电动按摩器的按摩部位为肌肉时,由于肌肉比较柔软,按摩头始终处于接触人体状态,所以实时pwm脉宽值始终大于按摩头未与人体接触时的空载pwm脉宽值。当电动按摩器的按摩部位为骨骼时,由于骨骼的硬度较大,会使得按摩头弹离人体,短暂处于空载状态,所以实时pwm脉宽值会存在与空载pwm脉宽值相等的情况。基于此,通过实时pwm脉宽值与空载pwm脉宽值的大小,即可准确判断出电动按摩器的按摩部位是否为骨骼。
实施例
22.本实施例所述的电动按摩器,包括:电动按摩器机身、设置在电动按摩器机身内的控制器、与控制器电性连接的电机以及连接在电机输出轴上的往复机构,往复机构设有穿出电动按摩器机身与按摩头连接的滑动轴。电动按摩器可以是筋膜枪或者具有上述结构的电动按摩器。此外,电动按摩器的实时pwm脉宽值会随着电动按摩器与人体接触力的变化而变化,通常情况下,其变化情况为:若电动按摩器与人体接触力增大,则实时pwm脉宽值增大,若电动按摩器与人体接触力减小,则实时pwm脉宽值减小。
23.本实施例所述的电动按摩器基于pwm的骨骼识别方法,如图1所示,包括以下步骤:s1、获取电动按摩器在未接触人体时,当前档位电机的空载pwm脉宽值;可以理解,电动按摩器的档位不同,对应的空载pwm脉宽值也有所不同,即每个档
位对应一个空载pwm脉宽值。在实际使用之前,可以通过在控制器中设置不同档位对应的空载pwm脉宽值,进而在实际使用时通过当前档位确定出电机的空载pwm脉宽值。
24.s2、根据预设周期采集电动按摩器电机的实时pwm脉宽值;其中,预设周期可以根据实际情况设置,为了进一步提高骨骼识别的准确性,本实施例中,所述预设周期优选为200毫秒。
25.s3、根据所述实时pwm脉宽值和空载pwm脉宽值判断当前按摩部位是否为骨骼。
26.可以理解,电动按摩器由pwm脉宽值控制电机转速,pwm脉宽值越大,电机转速越高,pwm脉宽值越小,电机转速越低。当按摩头与人体接触时,电动按摩器与人体接触力变大,按摩头将受力通过传运装置传递到电机后,会造成电机转速下降,此时控制器会控制pwm脉宽值增大来使电机保持在额定转速;即当按摩头未与人体接触时,pwm脉宽值较小,当按摩头与人体接触时,pwm脉宽值较大。
27.如图2所示,当电动按摩器的按摩部位为肌肉时,由于肌肉比较柔软,按摩头始终处于接触人体状态,所以实时pwm脉宽值始终大于按摩头未与人体接触时的空载pwm脉宽值。如图3所示,当电动按摩器的按摩部位为骨骼时,由于骨骼的硬度较大,会使得按摩头弹离人体,短暂处于空载状态,在空载状态时,实时pwm脉宽值与空载pwm脉宽值相等。
28.基于此,本实施例根据预设周期采集电动按摩器电机的实时pwm脉宽值,根据采集的实时pwm脉宽值与空载pwm脉宽值的大小来进行骨骼识别,在不需要改变现有电动按摩器结构,也不需要增加额外硬件的基础上,仅仅通过改变控制器的检测和控制方式即可实现电动按摩器的骨骼识别,不仅降低了生产装配难度和成本,还提高了电动按摩器的使用寿命。具体包括:比较每次采集的实时pwm脉宽值和空载pwm脉宽值的大小,判断实时pwm脉宽值是否始终大于空载pwm脉宽值,若是,则判定当前按摩部位为肌肉,否则,判定当前按摩部位为骨骼。
29.可以理解,当实时pwm脉宽值始终大于空载pwm脉宽值时,表示按摩头始终处于接触人体状态,此时判定当前按摩部位为肌肉,当实时pwm脉宽值没有始终大于空载pwm脉宽值时,即存在实时pwm脉宽值与空载pwm脉宽值相等的情况,表示按摩头存在处于非接触人体状态的情况,此时判定当前按摩部位为骨骼。
30.在按摩部位为骨骼时,由于骨骼硬度较大,即使用户的用力较大,按摩头也仍然会发生弹跳,使得电动按摩器短暂的处于空载状态,因此,通过pwm脉宽值的方式能够实现骨骼的准确识别,提高骨骼识别的准确性。
31.作为优选,本实施例所述的电动按摩器基于pwm的骨骼识别方法还可以包括:若判定当前按摩部位为骨骼,则降低电动按摩器的电机转速。
32.具体而言,在判定当前按摩部位为骨骼后,可通过控制pwm脉宽值降低的方式降低电机的转速,从而减轻按摩头的击打力度,保护骨骼免受伤害。
33.为了保证电动按摩器的正常工作,本实施例所述的电动按摩器基于pwm的骨骼识别方法还可以包括:在降低电动按摩器的电机转速达到预设时间后,恢复电动按摩器的电机转速。
34.其中,预设时间可以根据实际情况设置,为了实现在保证电动按摩器能够正常工作的情况下对骨骼的有效保护,所述预设时间优选为5秒。
35.作为优选,本实施例所述的电动按摩器基于pwm的骨骼识别方法还可以包括:根据加速度判断当前按摩部位是否为骨骼的流程,当根据所述实时pwm脉宽值和空载pwm脉宽值判定当前按摩部位为骨骼,并且根据加速度判定当前按摩部位为骨骼时,才最终判定当前按摩部位为骨骼;所述根据加速度判断当前按摩部位是否为骨骼的流程包括:采集电动按摩器机身的加速度数据;对所述加速度数据进行傅立叶变换后,得到加速度数据对应的频域信号;根据所述频域信号判断当前按摩部位是否为骨骼。
36.具体而言,电动按摩器机身的加速度数据可通过设置在电动按摩器机身内的加速度传感器进行采集,加速度传感器与电动按摩器机身内的控制器电性连接,在电动按摩器的使用过程中,采集的加速度数据体现了电机振动信号、电动按摩器整体的振动信号以及电动按摩器带动人手的振动信号的振动叠加信号。由于将加速度传感器设置在电动按摩器机身内,相较于设置在按摩头内,同样无需在电动按摩器机身和按摩头之间增加连线,也降低了生产装配难度和成本,提高了电动按摩器的使用寿命。
37.图4示出了一种电动按摩器击打肌肉时加速度数据对应的时域信号示意图,通过对该时域信号进行傅里叶变换即可得到图5所示的该时域信号对应的频域信号。图6示出了一种电动按摩器击打骨骼时加速度数据对应的时域信号示意图,通过对该时域信号进行傅里叶变换即可得到图7所示的该时域信号对应的频域信号。在时域信号中,横坐标用于表示时间,纵坐标用于表示加速度,在频域信号中,横坐标用于表示频率,纵坐标用于表示幅值。通过傅里叶变换将时域信号转换为频域信号属于现有技术,此处不再赘述。
38.可以看出,无论按摩部位为肌肉还是骨骼,在频域信号中始终存在一个大约30hz高频的电机振动信号,但是,如图5所示,当电动按摩器的按摩部位为肌肉时,由于肌肉比较柔软,肌肉会和电动按摩器发生共振,此时频域信号中会出现一个5hz低频的共振信号。虽然该共振信号的频率会随着用户的用力大小产生一定程度上的变化,但幅值不会有较大变化。如图7所示,当电动按摩器的按摩部位为骨骼时,电动按摩器会出现无规律的弹跳,此时,频域信号中的低频区域的频点幅值呈无规律变化;通过判断频域信号中是否存在该共振信号,即可准确判断出电动按摩器的按摩部位是否为骨骼。
39.基于此,本实施例可以通过以下方法判断当前按摩部位是否为骨骼:获取电动按摩器当前档位对应的电机频点幅值,判断所述频域信号中是否存在小于电机频点幅值并且大于其它任意一个频点幅值预设倍数的频点,若是,则判定当前按摩位置为肌肉,否则,判定当前按摩位置为骨骼,所述其它任意一个频点不包括电机频点。
40.需要说明的是,频点用于表示频域信号中各尖峰点对应的频率,频点幅值用于表示频点对应的幅值,即各尖峰点对应的幅值,电机频点幅值用于表示电机振动信号对应的幅值,电动按摩器的档位不同,其对应的电机频点幅值也有所不同,即档位与电机频点幅值一一对应,档位与电机频点幅值的对应关系可以预先设置在控制器中。
41.当电动按摩器的按摩部位为肌肉时,频域信号中除了电机频点幅值较大外,还包括肌肉和电动按摩器的共振信号对应的频点幅值显著大于其他频点幅值,而当电动按摩器的按摩部位为骨骼时,频域信号中除了电机频点幅值较大外,没有显著大于其他频点幅值的频点,因此,可以通过频域信号中是否存在小于电机频点幅值并且大于其它任意一个频点幅值预设倍数的频点来判断当前按摩部位是否为骨骼。
42.当用户的用力较大时,虽然频域信号中肌肉和电动按摩器的共振信号对应的频点大小会产生一定程度上的变化,但频点幅值不会产生较大变化,因此,即使用户的用力大小发生较大变化,也不会对骨骼识别造成影响,进而提高了骨骼识别的准确性。
43.其中,预设倍数可以根据实际情况设置,为了进一步提高骨骼识别的准确性,本实施例中,所述预设倍数优选为2倍。
44.在实际使用过程中,可以先根据pwm脉宽值进行骨骼识别,当判定当前按摩部位为骨骼时,才根据频域信号进行骨骼识别,也可以先根据频域信号进行骨骼识别,当判定当前按摩部位为骨骼时,才根据pwm脉宽值进行骨骼识别,还可以同时根据pwm脉宽值和频域信号进行骨骼识别。
45.当两次识别均判定当前按摩部位为骨骼时,才最终判定当前按摩部位为骨骼,通过pwm脉宽值和频域信号的多维度识别,进一步提高了电动按摩器骨骼识别的准确性。
46.同理,在最终判定当前按摩部位为骨骼后,也可以通过控制pwm脉宽值降低的方式降低电机的转速,从而减轻按摩头的击打力度,保护骨骼免受伤害。也可以在降低电动按摩器的电机转速达到预设时间后,恢复电动按摩器的电机转速,从而保证电动按摩器的正常运行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1