一种手术机器人的制作方法
1.本发明涉及医疗设备技术领域,具体的是一种手术机器人。
背景技术:
2.手术机器人能够帮助医生实现手术的精确定位,具有减少病人伤口从而缩短术后恢复时间等优势。并且其具有稳定的操作平台,能够解决医生的颤抖等情况,因而在临床外科手术中有大量的应用。
3.手术机器人中的手术器械,通常在细长管的一端处具有手术工具形式的后端执行机构,例如钳子、剪刀、夹子等。所述后端执行机构的常规运动结构是采用钢丝绳来转动后端执行机构,以完成俯仰、偏转和夹握的动作。
4.外科医生在控制台侧控制手术侧驱动器上的器械,为满足手术中不同手术器械使用需求,手术器械与器械驱动器通常设计为可拆卸性,用于在手术中更换不同手术器械需求,同时手术器械通常为可以独立的消毒灭菌。
5.器械驱动器端通常设计为不可消毒性,为保证手术过程中的无菌性,在手术时,需要在器械驱动器与器械间加入一个无菌适配器,用于隔离手术时不可消毒的器械驱动器端以及可消毒的器械端。
6.手术器械后端与无菌适配器上表面连接,器械驱动器与无菌适配器下表面进行连接,器械驱动器通过无菌适配器对手术器械后端执行机构提供驱动力,达到完成俯仰、偏转和夹握的动作目的。
7.无菌适配器下表面与器械驱动器上表面连接,连接后稳定不脱离,同时在需要解锁时能够方便快捷的将无菌适配器从器械驱动器上解锁分离,手术器械后端与无菌适配器上表面连接,连接后保持稳定不脱离,通知在需要解锁时能后方便快捷的将手术器械从无菌适配器上解锁分离。
8.在现有技术中,无菌适配器与器械驱动器的连接结构,是依靠无菌适配器上盖塑胶件中间部位上下长出两个卡扣,下卡扣与器械驱动器进行连接,上卡扣与手术器械末端进行连接,该方案依靠塑胶材料本身的形变与器械驱动器或是手术器械末端进行连接。
9.当前现有方案存在以下几个主要问题:当前方案无菌适配器与器械驱动器以及手术器械连接方式依靠无菌适配器中间部位上下端伸出的塑胶卡扣进行扣合连接,连接部位布置在中间部位,这种布局在器械驱动器通过无菌适配器对手术器械后端执行机构提供驱动力,完成俯仰、偏转和夹握的动作时,器械驱动器与无菌适配器、无菌适配器与手术器械如只有两侧连接,而两个端部没有连接扣连接部位,使得整个系统受力不均衡,容易造成结构振动或发生器械倾覆。
10.当前方案无菌适配器与器械驱动器以及手术器械连接方式依靠无菌适配器中间部位上下端伸出的塑胶卡扣进行扣合连接,连接方式依靠塑胶材料塑性形变进行扣合卡入,其卡入方式是沿塑胶卡扣根部为轴心旋转卡入器械驱动器固定卡扣上的,如果需要满足塑胶卡扣能完全卡入固定卡扣,由于有个圆周运动关系,扣合好后,塑胶卡扣与固定卡扣
必定会有间隙,所以现有方案在扣合完成后两个卡扣直接存在一定的间隙,扣合后不稳固,对这个系统的稳定性有一定的影响。
11.当前方案中,由于无菌适配器两侧的塑胶卡扣各自孤立的结构,无菌适配器与器械驱动器在安装时,需要两个塑胶卡扣分别对各自的扣位对准、调整形变角度和位置,操作步骤过多。且塑胶卡扣的扣合位点太少,且塑胶由于塑胶卡扣具有一定的变形,只能做到无菌适配器和器械驱动器的粗对准,但并不能帮助无菌适配器与器械驱动器达到精确对准。
技术实现要素:
12.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
13.为解决以上技术问题,本发明设计了一种手术机器人,能够使得器械驱动器与无菌适配器连接结构紧密,在使用时不容易产生结构的形变,本发明是采用如下方案实现的:
14.一种手术机器人,包括:
15.器械驱动器;
16.可以与器械驱动器连接的无菌适配器;
17.所述器械驱动器和所述无菌适配器的第一连接位点通过钩形表面配合,所述器械驱动器与所述无菌适配器的第二连接位点通过活动卡扣连接。
18.本发明的手术机器人,通过器械驱动器与无菌适配器的第一位点的连接,其一定程度上通过刚性连接,使得二者结构连接紧密,使得器械驱动器与无菌适配器的连接不容易产生结构上的活动或形变,同时第一位点和第二位点连接,一方面使得器械驱动器与无菌适配器连接结构的更加紧密、结实,另一方面,在使用时减少震动。
19.优选地,位于所述第一连接位点处,所述器械驱动器和所述无菌适配器中的一者具有凸出的钩形表面,所述器械驱动器和所述无菌适配器中的另一者具有与该凸出的钩形表面所配合的内嵌位。
20.优选地,所述无菌适配器具有凸出于所述无菌适配器壳体结构的钩形表面,所述器械驱动器具有内凹于所述器械驱动器壳体结构的钩形表面。
21.优选地,所述第一连接位点有两组,两组所述第一连接位点位于所述器械驱动器和所述无菌适配器的配合表面的两侧。
22.优选地,所述无菌适配器的钩形表面与所述无菌适配器的壳体表面一体成型。
23.优选地,所述无菌适配器和或所述器械驱动器的钩形表面在沿所述无菌适配器的两侧跨度方向上具有宽度。
24.优选地,所述钩形表面具有多段连续的曲面和/或直面的组合。
25.优选地,所述第一连接位点包括有至少一个连接侧面配合部分。
26.更优选地,所述侧面配合部分包括有直面配合部分。
27.更优选地,所述侧面配合部分其位于所述器械驱动器的配合表面和无菌适配器的配合表面中的至少一个配合表面具有弧形导向面。
28.优选地,位于所述第二连接位点处,所述器械驱动器和所述无菌适配器中的一者具有固定扣,所述器械驱动器和所述无菌适配器中的另一者具有与该固定扣配合的活动
扣。
29.更优选地,位于所述活动扣和/或所述固定扣的非配合面部分具有斜楔面。
30.更优选地,所述固定扣的其与所述活动扣非配合面的部分,具有平滑曲面。
31.更优选地,所述固定扣其位于朝向所述第一连接位点方向的部分,具有坡度曲面。
32.更优选地,所述固定扣其位于背离所述第一连接位点方向的部分,具有竖向曲面。
33.更优选地,具有所述活动扣的器械驱动器或所述无菌适配器的壳体内,具有与所述固定扣相适配的完整曲面。
附图说明
34.图1本发明具体实施方式中器械驱动器、无菌适配器和手术器械的装配完成状态结构示意图
35.图2本发明具体实施方式中器械驱动器、无菌适配器和手术器械的分解状态示意图
36.图3本发明具体实施方式中器械驱动器和无菌适配器的装配结构状态侧视图
37.图4本发明具体实施方式中器械驱动器和无菌适配器的第一连接位点的装配状态细节放大图
38.图5本发明具体实施方式中器械驱动器和无菌适配器未装配时的结构状态侧视图
39.图6本发明具体实施方式中器械驱动器和无菌适配器未装配的立体图
40.图7本发明具体实施方式中器械驱动器和无菌适配器的第一连接位点的结构示意图
41.图8本发明具体实施方式中器械驱动器和无菌适配器的第二连接位点的结构示意图
42.图9本发明具体实施方式中无菌适配器的分解结构示意图
43.图10本发明具体实施方式中第二连接位点的分解结构示意图
44.图11本发明具体实施方式中器械驱动器和无菌适配器的装配过程示意图
45.附图标记说明:
46.100器械驱动器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101器械驱动器的装配表面
47.103钩形嵌位
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103a钩形嵌位的前部
48.103a1构成钩形嵌位的前部的面
ꢀꢀ
103b构成钩形嵌位的后部的面
49.103b1平直面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103b2弧度面
50.103b3斜面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1031钩形嵌位的侧部
51.1032钩形嵌位的导向部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104固定扣
52.1041固定扣的卡接面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1042固定扣的曲面结构
53.1043配合面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1044平滑弧面
54.1045坡度曲面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130驱动器传动件
55.200无菌适配器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210无菌适配器的上部壳体
56.211无菌适配器的上表面
ꢀꢀꢀꢀꢀꢀꢀꢀ
212开口
57.220无菌适配器的下部壳体
ꢀꢀꢀꢀꢀꢀ
221无菌适配器的下表面
58.222钩形构件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
222a钩形构件的前部
59.222a1钩形构件的前部的面
ꢀꢀꢀꢀꢀꢀ
222b钩形构件的后部
60.222b1平直面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
222b2弧度面
61.222b3斜面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2221钩形构件的侧部
62.2222钩形构件的侧部的下端
ꢀꢀꢀꢀꢀ
223让位部
63.224导向槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
225弹簧
64.226凹陷结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230适配器传动件
65.240活动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
241活动扣
66.2411活动扣的卡接面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2412斜楔面
67.242操作部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
243操作按钮
68.244导向部
具体实施方式
69.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
70.本发明提供了一种手术机器人手术器械驱动传动部分以及装配部分的机构。以下结合附图对本发明的实施方式进行说明。
71.在本发明中,手术器械驱动传动部分的机构主要包括三大部分,器械驱动器、无菌适配器和手术器械。
72.其中,器械驱动器100安装于手术机器人的末端滑动臂上,可以在滑动臂上上下移动。器械驱动器中有若干个驱动电机,可以是三个、四个或五个等,每个电机对应有一输出轴,器械驱动器的电机连接输出轴通过器械驱动器表面的传动结构、无菌适配器的传动结构以及手术器械的传动结构向手术器械的执行机构传递动力,以驱动手术器械夹爪的俯仰、偏转和夹握的动作。
73.无菌适配器200,隔绝器械驱动器与手术器械的直接接触,其连接在无菌围帘上,无菌围帘和无菌适配器将手术机器人的机械臂和器械驱动器进行包裹起来,使得机械臂和器械驱动器与外部隔绝,无菌适配器则接合在器械驱动器的上端表面,无菌适配器上设置有适配器传动件,以传递动力。
74.手术器械300,与无菌适配器接合,手术器械设置有器械传动件,并通过与无菌适配器的适配器传动件配合,由器械驱动器驱动手术器械的俯仰、偏转和夹握的动作。
75.在实施例中,为描述各个机构组件的位置关系,定义多个方向名词,这些方向名词的解释,以手术器械的套管的的纵长方向为z方向或竖直方向,以手术器械盒或器械驱动器或无菌适配器的两侧的跨度方向为x方向,以手术器械背部至手术器械套管的延伸方向为y方向,其中,“上”、“下”指示的是手术器械、无菌适配器、器械驱动器三者在使用时的视觉角度,“前”、“后”是以手术器械的手术器械套管与手术器械盒的背部角度为基本方向,其中朝向手术器械套管的方向可为“前”,朝向手术器械盒的背部方向为“后”,“左”“右”则是以正视手术器械套管的视角能看到的手术器械盒两侧的左右方向。
76.以下结合实际应用场景,来阐述本发明的具体实施方式。
77.具体的,器械驱动器100包括有用于与无菌适配器配合的装配表面101,器械驱动
器的装配表面101与无菌适配器的装配表面呈大小、形状均配合的结构。器械驱动器100的装配表面101开设用于安装器械驱动器传动件的安装孔,器械驱动器传动件130位于安装孔内,并且器械驱动器传动件130的上表面凸出于器械驱动器的装配表面。器械驱动件130的数量,与输出轴的数量相同,可以是三个、四个、五个或更多个。
78.无菌适配器200,其无菌适配器的下表面221与器械驱动器的装配表面 101配合,其无菌适配器的上表面211与手术器械后端的手术器械盒300配合。无菌适配器200的结构,主要包括上部壳体210、下部壳体220和贯通于上部壳体和下部壳体的无菌适配器传动件230。
79.器械驱动器110和无菌适配器200,其位于驱动器传动件130和无菌适配器传动件230的传动连接的部分为传动区域,其位于靠近器械驱动器110和无菌适配器200的装配表面的边缘部分的区域为非传动区域。器械驱动器与无菌适配器的非传动部分的连接,主要位于非传动区域。
80.其中,无菌适配器200与器械驱动器100的连接具有第一连接位点,该第一连接位点通过钩形的表面进行配合连接。
81.具体的,如图3,图4,图5,图6和图7,器械驱动器有形成凹陷的钩形嵌位103,形成该钩形嵌位103的钩形表面与器械驱动器的装配表面101呈一体结构,也即,构成该钩形嵌位103的部分,与器械驱动器的上部壳体210 为一体成型。该钩形嵌位103位于器械驱动器靠近前端的位置。
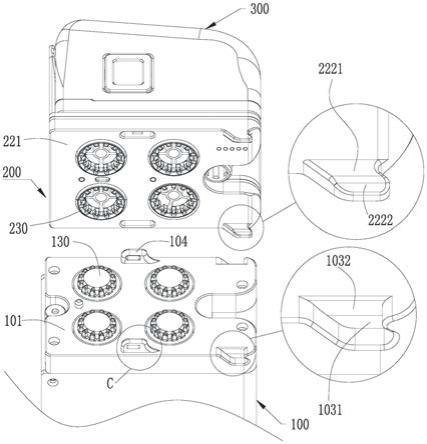
82.相应的,无菌适配器的下表面221,具有凸起的钩形构件222,该钩形构件222的钩形表面与无菌适配器的下表面221呈一体式结构,也即,该钩形构件222与无菌适配器的下部壳体220一体成型。该钩形构件该钩形构件222 位于无菌适配器前端的位置。
83.其中,形成钩形嵌位的钩形表面具有多段连续的曲面和/或直面的组合。
84.在实施例中,钩形嵌位103主要包括靠近器械驱动器前侧的前部103a和靠近器械后侧的后部103b。其中,前部103a的上方是器械驱动器的上部壳体的实体结构,前部103a是用于容纳钩形构件前端的容纳空间。实施例中,构成钩形嵌位的钩形表面包括构成前部103a的面以及构成后部103b的面。构成前部103a的面103a1,实质上为器械驱动器的上部壳体的实体结构在器械驱动器的前后跨度方向上具有大致呈“s”形的表面,也即从器械驱动器的侧视角度看,面103a1大致呈“s”形。构成后部103b的面,具有一部分平直面 103b1续接构成前部的面103a1,还具有一部分平弧度面103b2及斜面103b3 续接器械驱动器的装配表面101。
85.在实施例中,构成钩形嵌位103的钩形表面应在器械驱动器的左右方向上具有宽度。
86.相应的,钩形构件的钩形表面具有多段连续的曲面和/或直面的组合。
87.钩形构件主要包括位于无菌适配器前侧的前部222a和靠近无菌适配器后侧的后部222b。实施例中,钩形构件的前部222a是实体结构,其实体结构形成的面222a1在无菌适配器的前后跨度方向的表面大致呈“s”形,也即面222a1从侧视角度上看,大致呈“s”形。钩形构件的前部222b也为实体结构,其实体结构在左右跨度方向上具有续接面222a1的平直面222b1、弧度面 222b2及续接无菌适配器下表面221的斜面222b3。
88.在实施例中,钩形构件的钩形表面应在器械驱动器的左右方向上具有宽度。
89.在安装时,将无菌适配器的钩形构件222嵌入到器械驱动器的钩形嵌位内103,钩形构件222的钩形面,其与器械驱动器的钩形嵌位103,通过楔紧的方式,其在竖直方向也即z方向上具有分力,同时使得无菌适配器与器械驱动器在该部分不需要采用外部构件即可产生具有一定刚性的连接,在一定程度上避免了某些了结构复杂、外部构件过多、可活动构件过多产生的较高的累积公差。
90.其中,无菌适配器的钩形构件,在左右方向上小于甚至于远小于无菌适配器的宽度,也即钩形构件仅仅是在无菌适配器的下部一个小的凸起,相应的,器械驱动器的钩形嵌位,也仅仅是一个小的凹陷,因此,器械驱动器的钩形嵌位,钩形构件与钩形嵌位的配合,除了沿无菌适配器的前后方向跨度方向的配合部分之外,还具有侧面配合部分。
91.具体的,器械驱动器的钩形嵌位103可以有一个或两个平直的侧部1031,侧部1031可以是竖直面或倾斜面,在侧部1031的上部,具有一部分平滑弧形面或曲面,该部分平滑弧形面或曲面是钩形嵌位的导向部1032,无菌适配器的钩形构件222相应的,其也具有平直的侧部2221可以与钩形嵌位的侧部 1031配合,且钩形构件的侧面的下端2222也可以为平滑的曲面或弧形面结构,这部分结构中,钩形嵌位的侧部1031与钩形构件的侧部2221能够形成紧密配合,可以在钩形构件在插入钩形嵌位时,限制钩形构件222在左右方向上也即x方向上不移动,进而限制无菌适配器200在x方向上的不移动,而钩形嵌位的导向部1032以及钩形构件的下端2222的曲面或弧形面则具有导向的作用,在无菌适配器的钩形构件嵌入至器械驱动器的钩形嵌位时更为顺滑自然。
92.其中,无菌适配器的钩形构件设置在位于无菌适配器的下表面的两侧,器械驱动器的钩形嵌位设置在位于器械驱动器的装配表面的两侧,使得二者在装配后钩形表面的连接方式可见。
93.进一步的,在无菌适配器的下端的前侧,也即位于钩形构件上端的前方,具有一让位部223,让位部223的结构为斜面或平滑弧面,该让位部223的斜面或平滑弧面与钩形构件的钩形面平滑过渡,也即钩形构件的钩形面与斜面在左侧视角度大致呈<形结构,<形的上部翼是让位部的斜面或平滑弧面,<形的下部翼是钩形构件222的钩形面的一部分。
94.以上无菌适配器与器械驱动器钩形表面配合的部分,是二者的第一连接位点。无菌适配器与器械驱动器进一步还具有第二连接位点,第二连接位点为活动卡扣的连接方式。第二连接位点与第一连接位点跨距设置,也即在无菌适配器和器械驱动器的配合表面上并且在前后方向也即在y方向上具有跨度。
95.具体的,在器械驱动器设置有固定扣104,无菌适配器包括有活动扣241,活动扣241与固定扣104可在上下方向上形成卡接,也即,固定扣104具有方向向下的卡接面1041,活动扣241具有方向向上的卡接面2411。
96.其中,固定扣104凸出于器械驱动器的上表面101,并与器械驱动器的上部壳体一体成型。如图9和图10,无菌适配器上设置有活动件240,活动扣 241位于活动件240的下部,活动件240的上部为操作部242,操作部连接有操作按钮243。活动件240还包括有一导向部244。在无菌适配器上开设有用于容纳导向部的导向槽224,导向部244可以插入至导向槽224内,并沿着导向槽的方向移动。导向槽224的开设方向,是沿无菌适配器的左右跨度方向,也即x方向。同样的,导向部244的移动方向也是沿无菌适配器的左右跨度方向。导向部244位于导向槽244内,并与导向槽内的弹簧225抵接,弹簧 225提供推力驱使导向部244或
活动件240向无菌适配器的左右两侧方向,也即远离无菌适配器传动部分的方向移动。在实施例中,无菌适配器具有上部壳体210和下部壳体220两部分,导向槽开设于下部体220上,且导向槽224 的两端封闭,使得导向部244的活动范围只能在导向槽224内。无菌适配器的上部壳体开设有开口212,大致位于导向槽224的上方,开口212用于提供操作部的移动空间。活动件240由于弹簧的驱使力,其锁定位置是活动件抵接导向槽远离无菌适配器传动部分的状态时的位置,活动件的解锁位置,则是人为的移动操作部,使得活动件靠近无菌适配器传动部分的状态时的位置。在图示的实施例中,无菌适配器的两个活动件不产生联动,其各自连接有弹簧,在操作时,分别捏住两个活动件操作按钮,使力,使得两个活动件向互相靠近的方向移动,也即朝着靠近无菌适配器传动部分的方向移动,从而完成活动扣从锁定位置到解锁位置的移动。在一些实施例中,用于容纳两个导向部的导向槽可以连通设置,并且两个导向部之间连接一个弹簧,能够使得两个导向部或两个活动件产生联动。
97.在一些实施例中,如图10,活动扣241的下端还具有斜楔面2412,也即位于活动扣的卡接面2411的正下方,呈上升斜面,在安装时可以不用紧捏操作按钮,只需要对无菌适配器向下使力,即可由活动扣的斜楔面2412与固定扣104的顶端产生挤压,即可使得活动件由锁定位置到解锁位置的移动。
98.进一步,如图8,器械驱动器的固定扣104,还以特定的结构形式与无菌适配器的下表面配合,使得这部分活动扣接的部分,不仅具有扣合的功能,还结局导向及紧密配合的功能。具体的,器械驱动器的固定扣的上端部分,其在前后两侧、左右两侧,均具有平滑的曲面结构1042,同时在固定扣左右的两侧具有在竖直方向上平直的配合面1043,也即在yz面上具有平直的配合面,并且固定扣104的后端,也即靠近无菌适配器后端的方向,在沿竖直方向上绕z方向具有平滑弧面1044。
99.相应的,在无菌适配器的下部壳体210,具有用于固定扣嵌入的凹陷结构 226,第一活动扣位于第一凹陷结构226内,凹陷结构226在x方向、y方向上均具有平滑的曲面结构,能与固定扣完美配合。此处与前述的钩形配合表面相似的,使得固定扣和无菌适配器的用于固定扣嵌入的凹陷结构配合具有一定的刚性,在一定程度上减少了由于活动扣和固定扣的活动扣接方式带来的累积公差。
100.在一些实施例中,在器械驱动器的固定扣的前端,也即固定扣位于朝向第一连接位点的方向,其位于固定扣的下端还具坡度曲面1045,相应的,在无菌适配器的凹陷结构上也同样有与该坡度曲面相适配的曲面。
101.上述的无菌适配器与器械驱动器的安装过程为,将无菌适配器的前端向下倾斜,将钩形构件先插入器械驱动器的钩形嵌位,由钩形嵌位的导向部及钩形构件的下端导向,调整无菌适配器前端位置的左右方向也即x方向的微小移动,然后将无菌适配器的后端位置向下压,器械驱动器的固定扣位于左右两侧的曲面结构与无菌适配器的凹陷结构配合,形成无菌适配器后端在x 方向的微调整,然后直到位于钩形嵌位的侧部与钩形构件的侧部产生贴合、以及固定扣的左右两侧的配合面与凹陷结构的竖直面形成贴合,此时钩形嵌位的侧部与钩形构件的侧部、固定扣的左右两侧的配合面,形成了x方向的限位,使得无菌适配器不再调整x方向的位置。无菌适配器的后端继续向下压,器械驱动器的固定扣位于后端的曲面结构与无菌适配器的凹陷结构配合,形成y方向的导向,能够调整无菌适配器y方向的微小移动,同时,由于无菌适配器的凹陷结构与固定扣的导向作用,使得无菌适配器前端
的钩形构件继续向前推,而无菌适配器的后端进一步下压,无菌适配器的活动扣的下端与器械驱动器的固定扣的上端形成抵接,由于活动扣下端斜面与固定扣上端斜面的作用,使得活动件向无菌适配器的传动区域移动,然后无菌适配器的后端继续下压,活动扣的卡接面移动移动至固定扣的卡接面处时,活动扣由于弹簧的驱使力复位,同时,无菌适配器前端的钩形构件向前推直至钩形构件完全插入钩形嵌位内,钩形构件的钩形面与钩形嵌位的钩形面完全配合,而此时位于固定扣后侧的z轴面与无菌适配器的凹陷结构也完全配合。
102.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1