一种利用骨外固定架对骨折的整复以及畸形矫正方法
1.本发明涉及骨外固定架技术领域,特别涉及一种利用骨外固定架对骨折的整复以及畸形矫正方法。
背景技术:
2.利用骨外固定架治疗四肢骨折是一种常见的骨科治疗手段,它经软组织将骨钉固定在骨折的远、近端,然后再通过连杆和固定环将裸露于皮肤外骨钉彼此连接起来,在骨折端起到加压、牵拉的作用以达到复位和固定骨折、校正畸形的目的。
3.骨外固定架有多种形式,俄罗斯学者发明的一种新型ortho
‑
suv骨外固定架,包括分别固定在骨折的远端或近端的两个圆环,以及两个圆环间连接的六根支杆,通过对上述六根支杆长度的调节,改变两个圆环间的相对位置,以在术前和术后针对患者病情对ortho
‑
suv骨外固定架进行调整。
4.预确定两个圆环间的相对位置,需要对上述六个支杆的杆长进行耦合,故如何通过六个支杆的杆长得出两个圆环间的位置关系,或预将两个圆环调整到一确定位置时,如何各支杆长度进行调节,以上问题以待解决。
技术实现要素:
5.本发明就是鉴于以上问题而完成。本发明的目的在于提供一种利用骨外固定架对骨折的整复以及畸形矫正方法,克服上述缺陷,使ortho
‑
suv骨外固定架的调节更加易行。
6.为达成上述目的,本发明的解决方案为:一种利用骨外固定架对骨折的整复以及畸形矫正方法,方法中使用一种ortho
‑
suv骨外固定架,ortho
‑
suv骨外固定架包括基础环、移动环、基础环与移动环间的6根支杆,该方法具体包括以下步骤:
7.s1坐标系建立:
8.设6根支杆依次为k
i
,6根支杆的杆长分别对应为l
i
,其中i={1、2、3、4、5、6},k1、k3、k5与基础环的连接节点简化为a
i
,并构成δa1a3a5,k2、k4、k6与移动环的连接节点简化为b
i
,并构成δb2b4b6,δa1a3a5和δb2b4b6的边长为已知量,支杆间的连接节点为c
i
,k1与k2连接于c1,k1与k2连接于c1,k2与k3连接于c2,k3与k2连接于c3,k4与k5连接于c4,k5与k6连接于c5,k6与k1连接于c6,a
i
c
i
+1与b
i
c
i
+1长度为已知量d,a5通过z型连接片与基础环连接,其余节点a
i
和b
i
通过平连接片与基础环或移动环连接;
9.在基础环上建立定坐标系o
‑
xyz,原点o位于基础环圆心,x轴指向a1,z轴垂直向上,y轴由右手定则确定,在移动环上建立动坐标系o
′‑
x
′
y
′
z
′
,原点o
′
位于移动环圆心,x
′
轴指向b2,z
′
轴垂直向上,y
′
轴由右手定则确定;
10.将o
′‑
x
′
y
′
z
′
相对o
‑
xyz的位置关系用位姿向量表示,并建立将o
′‑
x
′
y
′
z
′
上点位变换的到o
‑
xyz上的变换矩阵,用在o
‑
xyz中的位置向量表示ai,在o
′‑
x
′
y
′
z
′
中的位置向量表示bi;
11.s2逆运动学分析:
12.已知所述位姿向量,求解l
i
,利用所述变换矩阵将转换为o
‑
xyz中的位置向量引入节点c
i
的在o
‑
xyz中位置向量建立约束方程求解引入杆长向量用用表示最终求的范数l
i
;
13.s3正运动学分析:
14.已知l
i
,建立约束方程,求解和而后将带入变换矩阵,由变换矩阵得到位姿向量中各参数。
15.s4术中、术后调整ortho
‑
suv骨外固定架:
16.在手术中对ortho
‑
suv骨外固定架进行固定时,通过s2中的逆运动学分析结果,调整6根支杆的长度,进而调整下固定环位姿,在将ortho
‑
suv骨外固定架安装后,依照6根支杆的实际长度进行s3中的正运动学分析,校验当前o
′‑
x
′
y
′
z
′
相对o
‑
xyz的位姿是否满足治疗需求。
17.进一步,所述位姿向量为:
[0018][0019]
其中p
x
、p
y
、p
z
表示原点o与o
′
的位置关系,欧拉角θ、ω分别表示动坐标系围绕定坐标系z,y,x轴的旋转量。
[0020]
进一步,所述将o
′‑
x
′
y
′
z
′
上点位变换的到o
‑
xyz上的变换矩阵为t:
[0021][0022]
其中c和s分别代表cos和sin,位置向量p表示o
′
相对于o的位置。
[0023]
进一步,用表示为:
[0024][0025]
进一步,设δa1a3a5的边长分别为l
13
、l
35
、l
51
,设o
‑
xyz中空间向量与x轴正方向夹角为θ1,空间向量与x轴正方向夹角为θ2,基础环半径为r1,z型连接片长为z1,高为z
h
,平连接片长为p
l
高为p
h
;
[0026]
则r1、θ1、θ2为:
[0027][0028][0029][0030]
进而,可表示为:
[0031][0032]
进一步,设δb2b4b6的边长分别为l
24
、l
46
、l
62
,设o
′‑
x
′
y
′
z
′
中空间向量与x
′
轴正方向夹角为θ3,空间向量与x
′
轴正方向夹角为θ4,移动环半径为r2,平连接片长为p
l
高为p
h
;
[0033]
则r2、θ3、θ4为:
[0034][0035][0036][0037]
进而,可表示为:
[0038][0039]
进一步,s2逆运动学分析中所述约束方程为:
[0040][0041]
设c
i
初始值为:
[0042][0043]
进一步,s3正运动学分析中所述约束方程为:
[0044][0045]
带入b
i
和c
i
初始值为:
[0046][0047]
将求解后得到的带入得到t,由t得出位姿向量。
[0048]
进一步,利用matlab中的fsolve函数求解s2和s3中的约束方程。
[0049]
采用上述方案后,本发明的有益效果在于:分别在基础环和移动环上建立坐标系o
‑
xyz、o
′‑
x
′
y
′
z
′
,并将ortho
‑
suv骨外固定架上的各连接处简化为节点,并建立节点与
‑
xyz和o
′‑
x
′
y
′
z
′
的关系,以及坐标系o
‑
xyz、o
′‑
x
′
y
′
z
′
间的位置关系,在术前根据预设置的坐标系o
‑
xyz、o
′‑
x
′
y
′
z
′
间的位置关系以及相应节点坐标,依照ortho
‑
suv骨外固定架的特有结构,建立约束方程,求解需设置的杆长,从而根据求得杆长调节ortho
‑
suv骨外固定架;在术后,根据实际的杆长,依照ortho
‑
suv骨外固定架的特有结构,建立约束方程,求解o
‑
xyz、o
′‑
x
′
y
′
z
′
间的位置关系,校验基础环相对移动环的实际位姿是否满足要求,从而使ortho
‑
suv骨外固定架的调节更加易行。
附图说明
[0050]
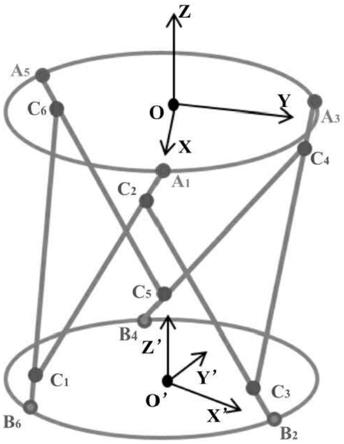
图1是本发明的ortho
‑
suv骨外固定架几何关系示意图。
具体实施方式
[0051]
以下结合附图及具体实施例对本发明做详细的说明。
[0052]
本发明涉及一种利用骨外固定架对骨折的整复以及畸形矫正方法,该方法中使用一种ortho
‑
suv骨外固定架,ortho
‑
suv骨外固定架包括基础环、移动环、基础环与移动环间的6根支杆,所述ortho
‑
suv骨外固定架为现有技术,不具体阐述,该方法具体包括以下步骤:
[0053]
s1坐标系建立:
[0054]
设6根支杆依次为k
i
,6根支杆的杆长分别对应为l
i
,其中i={1、2、3、4、5、6},如图1所示,k1、k3、k5与基础环的连接节点简化为a
i
,并构成δa1a3a5,k2、k4、k6与移动环的连接节点简化为b
i
,并构成δb2b4b6,δa1a3a5和δb2b4b6的边长为已知量,支杆间的连接节点为c
i
,k1与k2连接于c1,k1与k2连接于c1,k2与k3连接于c2,k3与k4连接于c3,k4与k5连接于c4,k5与k6连接于c5,k6与k1连接于c6,a
i
c
i+1
与b
i
c
i+1
长度为已知量d,其中当i=6时,i+1=1,即a1c2、a3c4、a5c6、b2c3、b4c5、b6c1的长度均为d,a5通过z型连接片与基础环连接,其余节点a
i
和b
i
通过平连接片与基础环或移动环连接;
[0055]
在基础环上建立定坐标系o
‑
xyz,原点o位于基础环圆心,x轴指向a1,z轴垂直向上,y轴由右手定则确定,在移动环上建立动坐标系o
′‑
x
′
y
′
z
′
,原点o
′
位于移动环圆心,x
′
轴指向b2,z
′
轴垂直向上,y
′
轴由右手定则确定;
[0056]
将o
′‑
x
′
y
′
z
′
相对o
‑
xyz的位置关系用位姿向量表示,所述位姿向量为:
[0057][0058]
其中p
x
、p
y
、p
z
表示原点o与o
′
的位置关系,欧拉角θ、ω分别表示动坐标系围绕定坐标系z,y,x轴的旋转量;
[0059]
建立将o
′‑
x
′
y
′
z
′
上点位变换的到o
‑
xyz上的变换矩阵,所述变换矩阵为t:
[0060][0061]
其中c和s分别代表cos和sin,位置向量p表示o
′
相对于o的位置;
[0062]
用在o
‑
xyz中的位置向量表示a
i
,在o
′‑
x
′
y
′
z
′
中的位置向量表示b
i
,具体地,设δa1a3a5的边长分别为l
13
、l
35
、l
51
,设o
‑
xyz中的空间向量与x轴正方向夹角为θ1,空间向量与x轴正方向夹角为θ2,基础环半径为r1,z型连接片长为z
l
,高为z
h
,平连接片长为p
l
高为p
h
;
[0063]
则r1、θ1、θ2为:
[0064][0065][0066]
[0067]
进而,可表示为:
[0068][0069]
设δb2b4b6的边长分别为l24、l46、l62,设o
′‑
x
′
y
′
z
′
中空间向量与x
′
轴正方向夹角为θ3,空间向量与x
′
轴正方向夹角为θ4,移动环半径为r2,平连接片长为p
l
高为p
h
;
[0070]
则r2、θ3、θ4为:
[0071][0072][0073][0074]
进而,可表示为:
[0075][0076]
s2逆运动学分析:
[0077]
在手术中对ortho
‑
suv骨外固定架进行固定时,需通过逆运动学分析进行求解杆长,即已知所述a
i
c
i+1
与b
i
c
i+1
长度d、δa1a3a5和δb2b4b6的边长、位姿向量,求解上固定环在当前位姿下的六根连杆的长度l
i
;
[0078]
利用所述变换矩阵将转换为o
‑
xyz中的位置向量引入节点c
i
的在o
‑
xyz中位置向量引入杆长向量用表示建立约束方程求解最终求的范数l
i
;
[0079]
将o
′‑
x
′
y
′
z
′
中转换为o
‑
xyz中的即:
[0080][0081]
故能够用表示为:
[0082][0083]
由于a
i
c
i+1
与b
i
c
i+1
长度为已知量d,故的范数,即长度同样为已知量d,其中当i=6时,i+1=1,并且由ortho
‑
suv骨外固定架的结构可知,且为同一方向,且为同一方向;
[0084]
故能够建立所述约束方程为:
[0085][0086]
设c
i
初始值为:
[0087][0088]
利用matlab中的fsolve函数求解上述约束方程,杆长l
i
为向量的范数,则:
[0089][0090]
s3正运动学分析:
[0091]
在ortho
‑
suv骨外固定架安装后,需确定当前固定环的空间位姿,通过正运动学分析进行求解。即已知各支杆长度l
i
,a
i
c
i+1
与b
i
c
i+1
的长度d,δa1a3a5和δb2b4b6的边长,建立约束方程,求解位姿向量
[0092]
具体地,所述约束方程为:
[0093]
[0094]
带入b
i
和c
i
初始值为:
[0095][0096]
利用matlab中的fsolve函数求解所述约束方程,将求解后得到的带入求解得到t,由t得出位姿向量中的各参数,求得位姿向量
[0097]
s4术中、术后调整ortho
‑
suv骨外固定架:
[0098]
在手术中对ortho
‑
suv骨外固定架进行固定时,通过s2中的逆运动学分析结果,调整6根支杆的长度,进而调整下固定环位姿,在将ortho
‑
suv骨外固定架安装后,依照6根支杆的实际长度,进行s3中的正运动学分析,校验当前o
′‑
x
′
y
′
z
′
相对o
‑
xyz的位姿是否满足治疗需求,进而达到对骨折的整复以及畸形矫正的目的。
[0099]
以上所述仅为本发明的较佳实施例,并非对本案设计的限制,凡依本案的设计关键所做的等同变化,均落入本案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1