一种基于无针自动注射器的人体疫苗注射系统及注射方法
本发明涉及医疗器械,具体涉及一种基于无针自动注射器的人体疫苗注射系统及注射方法。
背景技术:
1、无针注射技术是一种没有传统毛细管针头的注射方式,它不需要通过针头扎入肉体,而是由无针注射推动器通过机械性能稳定的环形压缩弹簧系统产生一定的压力,在压力作用下推动药液,药液通过一个直径约为0.12mm的小孔喷出,喷出初始速度约为200m/s,药液喷出则为弥散状态,从而药液穿透皮肤注入患者的皮下组织。因此也会一定程度上减少患者针扎肉刺的痛苦与恐惧。弹簧的弹射通过触发按压开关来控制。首先通过手动操作给弹簧加压、触发后将力传给撞击杆,撞击杆与活塞杆之间有一定的间隙,撞击杆撞击活塞杆,活塞杆推动注射管中的药液从直径0.12mm的小孔喷出,从而注入皮肤。
2、现有技术存在以下缺点:
3、一:疫情集中爆发时,医护工作量大,而采用传统的大规模皮下注射疫苗,势必会挤占大量的医疗资源。
4、二:在专利----用于猪只疫苗的自动注射设备中提到:注射方式为有针注射,若采取有针的方式来实现疫苗大规模注射,技术方面较为困难,且有针注射会给恐针人群带来大量不适感。而无针注射则可以避免这些缺点。
5、三:现有的电动无针注射器大多为手动操作,若疫情集中爆发时,势必会给医护人员带来大量的负担,若采用全自动装置代替医护人员进行注射则可大大减少医护劳动量,为疫情防控节省更多的医护资源,为疫情防控做出巨大贡献。
6、四:现有电动无针注射器在注射前缺少去除针管中的气泡这个环节,而气泡注入人体那日轻则红肿疼痛,重则伤害到人体血管神经组织。
7、五:现有电动无针注射器换取药管只能依靠人力来进行,无法实现自动换取药管,如果每次注射时不更换药管,容易导致血液类传染病的传播
8、无针自动注射技术,是指用磁力/高压气体/电机来控制电机通过传动机构实现压缩弹簧、触发等动作来实现自动注射。参考专利:cn202235764u一种无针注射器机械传动装置。
9、专利公开号一:cn107441594a-一种全自动无痛注射装置,该专利采用的是有针注射,用托架、电磁铁、步进电机、控制器来移动针头,并将针头快速扎入人体皮肤,但是对有针注射来说,在没有其他辅助条件下,具体注射部位难以通过现有的机器视觉技术来确认,具体针头注射深度也难以控制,但是无针注射技术能避免以上问题,只需要注射在护士提前画的圆形区域即可,因为没有针头,所以也无需考虑针头注射深度的问题。
10、专利公开号二:cn110882083a-一种可用于猪只疫苗自动注射设备也与本专利有相似之处
11、该专利包括了括ai视觉感知模块、机械臂2动作模块、注射枪模块、猪只捕捉固定模块、控制系统及基座,猪排队进入注射通道,由工业相机识别猪身需要注射的部位,再由机械臂2带动注射器运动到指定部位实现注射,并实现消毒和换针,该专利针对的是猪,而且采用的是在ai视觉的引导下采用有针自动注射。
12、因此,需要对现有技术进行改进。
技术实现思路
1、本发明要解决的技术问题是提供一种高效的一种基于无针自动注射器的人体疫苗注射系统及注射方法。
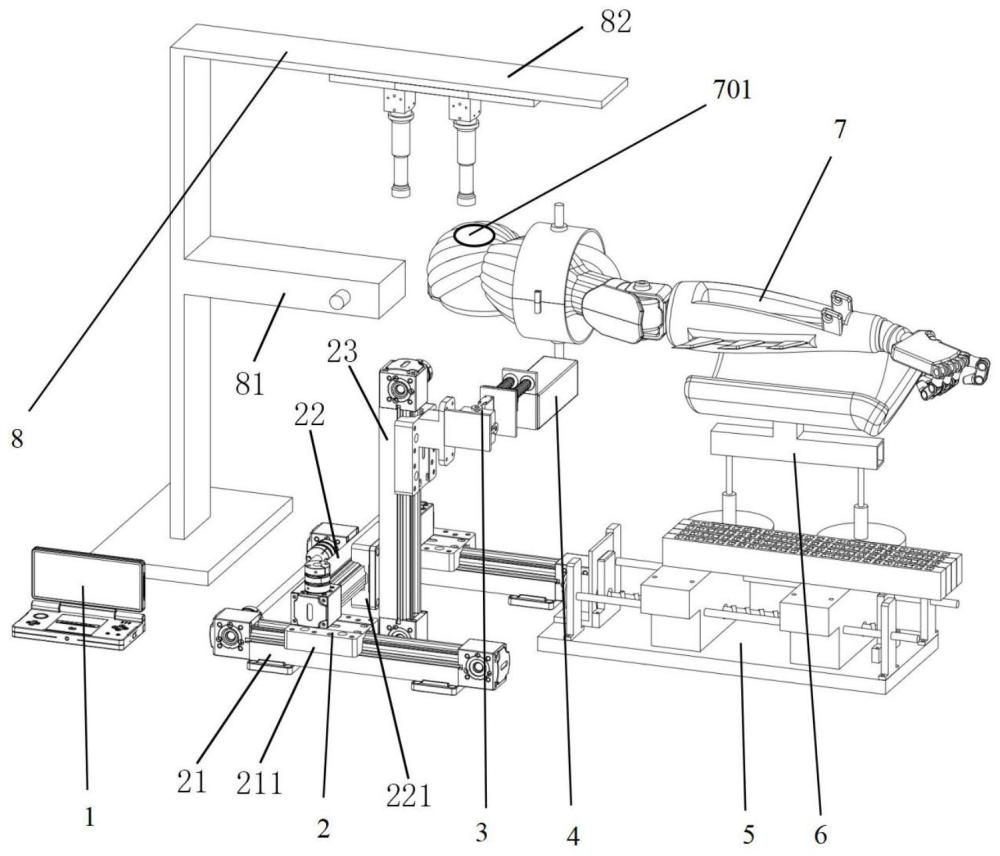
2、为解决上述技术问题,本发明提供一种基于无针自动注射器的人体疫苗注射系统,包括控制端、机械臂、注射压力控制模块、电动无针注射器、自动换取药管模块、手臂固定器和视觉模块;
3、所述控制端分别与机械臂、注射压力控制模块及电动无针注射器信号连接;
4、所述电动无针注射器设置在机械臂上;
5、所述机械臂分别与注射压力控制模块、自动换取药管模块、手臂固定器配合使用。
6、作为对本发明一种基于无针自动注射器的人体疫苗注射系统的改进:
7、所述控制端包括pc机和32单片机;pc机和32单片机信号连接;
8、所述机械臂包括x轴基座、y轴基座和z轴基座;x轴基座上滑动设置有y轴滑块,y轴基座固定安装在y轴滑块上,y轴基座上滑动设置有z轴滑块,z轴基座固定安装在z轴滑块上,z轴基座上滑动设置有大方盖注射压力控制模块固定安装在大方盖上;
9、所述注射压力控制模块包括连接件一、连接件二、舵机摆臂一、舵机摆臂二、舵机、压力传感器、弹簧垫、弹簧、圆形件、滚动轴承、连接轴和注射器底座;
10、所述机械臂上的大方盖与圆形件固定连接,圆形件与连接件一固定连接,连接件一与舵机摆臂一固定连接;所述舵机摆臂一与舵机卡扣连接,舵机摆臂二与舵机卡扣连接,舵机摆臂二与连接件二焊接,连接件二上固定有压力传感器,压力传感器上固定有弹簧垫,弹簧垫与弹簧固定连接,弹簧垫上固定设置有连接轴,弹簧套设在连接轴外侧,滚动轴承内嵌在注射底座内,滚动轴承套连接轴上,弹簧与滚动轴承抵接,电动无针注射器固定设置在注射器底座上上;
11、所述视觉模块包括了气泡检测模块和标记圆识别模块;
12、所述气泡检测模块包括固定架,固定架从下到上依次设置有水平设置的固定杆一和固定杆二,固定杆一竖直方向的开设有注射管放置孔,固定杆一水平方向开设有红外激光器放置孔,注射管放置孔与红外激光器放置孔相互连通;所述红外激光器放置孔内装有红外激光发射器和红外激光接收器,红外激光发射器和红外激光接收器分别位于注射管放置孔左右两侧;
13、所述标记圆识别模块包括相机、pc机、机械臂和注射压力控制模块,所述相机安装在固定杆二底部;
14、所述自动换取药管模块中包括丝杠滑台和药管盒,丝杠滑台上设置有丝杠承重板和直流电机,丝杠承重板的数量为若干个,丝杠承重板在同一直线上等距设置;所述直流电机上设置有丝杠,丝杠穿过所有丝杠承重板;
15、所述药管盒固定放置在丝杠承重板顶部,药管盒上设置有孔洞,孔洞中均匀放置注射管,注射管顶部固定设置有外螺纹杆,注射管底部开设有药液喷出孔,电动无针注射器开设有内螺纹孔,内螺纹孔与外螺纹杆相适配;
16、所述电动无针注射器分别与自动换取药管模块、手臂固定器及视觉模块配合使用;
17、所述控制端的32单片机分别与机械臂的电机、舵机及电动无针注射器信号连接;
18、所述控制端的pc机分别与红外激光接收器、相机及32单片机信号连接。
19、作为对本发明一种基于无针自动注射器的人体疫苗注射系统的改进:
20、所述丝杠滑台上还固定设置有固定板,固定板上设置有承重板连接轴,承重板连接轴穿过所有的丝杠承重板。
21、作为对本发明一种基于无针自动注射器的人体疫苗注射系统的改进:
22、所述连接轴的长度方向与丝杠的长度方向一致。
23、作为对本发明一种基于无针自动注射器的人体疫苗注射系统的改进:
24、所述固定杆二的长度大于固定杆一的长度。
25、作为对本发明一种基于无针自动注射器的人体疫苗注射系统的改进:
26、所述孔洞为正方形孔洞;注射管为长方体形。
27、作为对本发明一种基于无针自动注射器的人体疫苗注射系统的改进:
28、所述注射管放置孔的顶部封闭。
29、本发明还提供一种基于无针自动注射器的人体疫苗注射方法,包括以下步骤:
30、第一步、护士用印章在注射对象的三角肌外侧上盖上标记圆;注射对象将手臂固定在手臂固定器上,并尽量使标记圆与地面保持水平;
31、第二步、取药管;
32、控制端的32单片机控制机械臂和舵机带动电动无针注射器移动到药管盒正上方,注射管垂直于水平面,使注射管正对于药管盒孔洞的正上方,同时注射器的内螺纹孔与注射管的外螺纹杆上下保持一致,水平位置对准后,机械臂带动电动无针注射器垂直下移,同时舵机开始带动无针注射器旋转圈,使外螺纹杆与内螺纹孔啮合连接为一体;
33、第三步、检测注射管内的气泡;
34、控制端的32单片机控制机械臂带动电动无针注射器垂直上移,使得注射管脱离药管盒,并通过舵机转动180°调整电动无针注射器的姿态,使注射管的药液喷出孔垂直向上;
35、通过32单片机控制机械臂带动注射管准确移动到注射管放置孔正下方,注射管在机械臂的带动下垂直上移,将注射管插入注射管放置孔内;红外激光接收器采集到信号;
36、第四步、去除气泡;
37、红外激光接收器将采集到的信号传递给控制端的pc机,pc机分析是否有气泡;
38、若分析为有气泡,则控制端的32单片机带动注射管下移,使注射管离开气泡检测模块,执行去除气泡动作;
39、若分析为无气泡,执行步骤第五步;
40、第五步、识别标记圆;
41、相机识别标记圆;并将信号发送给控制端的pc机,pc机处理信号,并运算出绿色标记点的中心坐标,控制机械臂和舵机将注射管移动到绿色标记圆的中心坐标正上方,并保持注射管垂直向下,使药液喷出孔正对于标记圆的圆心;
42、机械臂相继带动舵机、压力传感器和电动无针注射器,使注射管垂直向下移动,直至注射管的药液喷出孔贴紧人体皮肤,由压力传感器接收向下压力的大小,并将信号传递给pc机,当压力达到预设压力时,停止下移,接下来32单片机控制电动无针注射器完成注射动作;
43、第六步、去除药管;
44、控制端的32单片机控制舵机和机械臂使注射管脱离人体,垂直上移,将注射管插入药管盒的孔洞中;接着机械臂带动注射管向上移动,舵机带动注射管旋转,使注射管与电动无针注射器分离。
45、作为对本发明一种基于无针自动注射器的人体疫苗注射方法的改进:
46、执行去除气泡动作:控制端的32单片机控制机械臂带动电动无针注射器垂直下移,使注射管离开注射管放置孔,舵机左右来回摇摆,使气泡集中于注射管的顶端,并通过32单片机控制电动无针注射器推动内部的活塞杆,使气泡通过药液喷出孔排出,执行完动作后,将注射管插入注射管放置孔中,再次进行检测,若有气泡则再次执行去除气泡的动作,直至气泡完全去除。
47、本发明一种基于无针自动注射器的人体疫苗注射系统及注射方法的技术优势为:
48、1、本发明中的标记圆为注射点准确识别与定位提供了保障;
49、2、本发明大大提升了无针注射器的自动化程度,大大减轻了医护人员的工作量,只需要医护人员提前在手臂三角肌处盖上标记圆,可在疫情爆发时,即可实现疫苗的大规模快速接种,可在疫情爆发时腾出更多的医疗资源,为疫情防控做出巨大贡献。
50、3、本发明采用了无针注射技术,大大减少了恐针人群的痛苦,极大减少了护士的工作量,同时更换药管阻断了血液类传染病的传播,避免了医护人员的职业暴露风险,为疫情防控作出贡献。
51、4、本发明与手动操作的电动无针注射器相比,采用机器视觉将注射管内的气泡去除减少了残留气泡注入人体带来的弊端。
52、5、本发明的手臂固定器可以将手臂固定住,使肩膀与地面保持水平,方便自动注射。
- 还没有人留言评论。精彩留言会获得点赞!