一种集成健康信息监测与预测的代步护理机器人
1.本发明属于医疗护理设备技术领域,尤其涉及一种集成健康信息监测与预测的代步护理机器人。
背景技术:
2.随着经济社会的发展,全球范围内人口老龄化问题日益严重,以我国为例,2020年老龄人口增长至2.64亿人,占比提升至总人口的18.7%。且老年人群体中心脑血管疾病、骨科疾病等发病率和致残率上升,针对失能老人康养照护面临的压力很大。根据贝哲斯咨询数据,我国接近24%的居民不知道康复医疗,仅26%的居民对康复治疗有正确认知,且数据显示,2017年我国人均康复医疗消费为5.5美元,远低于同年美国人均康复医疗消费54美元的水平,在需求端我国可挖掘潜力很大。因此有必要设计一款集成心率、血压、血氧等健康信息监测,同时对数据进行存储分析,形成健康档案,且具有家用代步,减轻护理人员压力的康复护理机器人。
3.目前市场上出现的健康监测陪护机器人主要侧重于人机交互,主要侧重于对老年人缺少陪护的情况下出现身体疾病或者出现危险时无法得到及时救治,因此主要运用加速度传感器监测老人是否摔倒等,人机交互功能受限于目前技术限制,在语音识别和实际问答体验上效果较差,健康监测主要依赖佩戴的智能手环,未能考虑到手环受制于形状大小及佩戴要求导致检测准确度受限。目前智能手环对心率的检测多采用ppg光电容积脉搏波描记法原理,以光学的方式来测量脉搏,经多年测试实验改进已较为成熟,但是手环对血压的检测不能做到准确,根据《jjg 692-2010无创自动测量血压计检定规程》规定,误差超过4mmhg即判定为不合格,因此如果测出的血压和实际不符,很可能影响到高血压病人的用药量,从而影响健康。其次现有的健康监测陪护机器人主要侧重于预警功能,未能对监测的数据进行存储和分析,错失形成使用者健康档案的机会,因此有必要针对这些问题点进行改善设计。
技术实现要素:
4.针对上述技术问题,本发明提出了一种集成健康信息监测与预测的代步护理机器人,该发明一方面可以有效的解决老龄人口失能,无法独立行走,对护理人员依赖程度过高的问题;另一方面也可以解决心脑血管等疾病依赖健康体检导致发现时间晚,且医生无法获得患者日常健康信息的问题。
5.为了达到上述目的,本发明采取的技术方案为:一种集成健康信息监测与预测的代步护理机器人,包括轮椅主体,其特征在于:包括检测单元,所述检测单元包括显示模块,检测箱和控制箱;所述显示模块用于控制和显示监测信息;所述检测箱位于所述轮椅主体的扶手下方,内部包括集成袖带式血压监测装置和心率检测模块、血氧检测模块;所述血压监测装置采用电子血压计;所述心率检测模块通过袖带上装有的接收器进行心率检测;血氧监测则是采用反射式血氧传感器芯片,通过发射与接收的光强差计算出血氧的饱和度;
所述控制箱位于所述轮椅主体的座椅下方,包括控制单元和数据处理单元,所述控制单元集成ardnino、蓝牙模块,能与智能手机配对,通过手机下载操作app,实现基于手机平台的护理机器人移动控制,app控制界面可实现前进、后退、左转、右转及电机调速功能,同时可设定提示进行健康监测;所述数据处理单元对接收信息进行存储和数据分析,并通过所述控制单元将数据上传至手机,建立健康档案。
6.进一步的,所述代步护理机器人包括运动单元,所述运动单元包括驱动电机、控制摇杆和电池组;所述控制摇杆有多档位选择调整移动速度,方便老龄失能人员使用;所述电池组给机器人供电。
7.进一步的,所述控制摇杆采用带有eabs驻坡功能的24v万向摇杆智能控制器,人机界面带有led提示,驱动方式为pwm占空比调节和电子差速,带有控制器报警音。所述电池组采用标称容量40ah,标准电压dc24v的锂电池组,可保证一次充电最大行程6公里左右;充电器输入电压220v,50hz,输出电压为29.2v,输出电流为5a。
8.进一步的,所述控制箱采用stm32f103rct6系列控制芯片。
9.进一步的,所述显示模块包括测量信息显示屏、指示灯和操作按键,用于测量控制、信息显示及报警提示。
10.本发明还提供了一种集成健康信息检测与预测的方法,基于以上描述的集成健康信息监测与预测的代步护理机器人,其特征在于包括如下步骤:
11.(1)利用所述代步护理机器人进行血压、心率和血氧的监测:
12.血压检测:采用电子血压计,使用者将袖带从检测箱中取出后,将气插嘴胶管连接好,通过显示模块上的按键进行血压检测操作;
13.心率检测:通过袖带上装有的光电接收器,发射出绿光;光束发出后,皮肤、肌肉组织和血液都会吸收一部分,剩下的再被反射回接收器上,心脏在收缩和舒张时会产生颜色不同的反射光,接收到的电信号也随着脉搏而变化;通过算法解调出这个信号,折算出心率;
14.血氧监测:采用反射式血氧传感器芯片,芯片中有两个发光二极管,分别将波长为669nm的红光和880nm的红外光射向腕部,另一侧的光电二极管就用来接收反射光线,通过发射与接收的光强差计算血氧的饱和度;
15.(2)利用所述代步机器人对监测数据的进行存储,所有检测的信息传输至控制箱中,数据处理单元对数据进行存储,信息包括检测数据的类型,如血压、心率及血氧;其次是检测的时间信息,具体到天;最后便是数据值的大小,并判断是否在正常区间,具体为血压值:收缩压90-140mmhg,舒张压60-90mmhg,心率为60-100次/分钟,血氧浓度﹥90%,在超过设定限时通过所述显示模块自动提示;
16.(3)利用所述代步机器人对存储数据进行数据处理,保证使用者多参数健康记录曲线的光滑度,并可对使用者的健康情况进行预测;
17.(4)将所有结果进行保存并通过控制模块上传至手机,建立健康档案。
18.进一步的,步骤(3)中的数据处理步骤如下:
19.(3.1)在测量数据超过一周后,对多组数据进行预处理:对某一量进行算术平均值:
[0020][0021]
依据贝塞尔公式得出测量的标准差为:
[0022]
为残余误差;
[0023]
(3.2)依据3σ准则判断处理后的数据信息是否存在粗大误差,并剔除其中存在粗大误差数据,保留剩余数据。
[0024]
(3.3)针对数据使用插值算法;
[0025]
在测量所得多组数据经过清洗过滤后,基于马尔可夫理论,在两次测量数据中间进行数据密化,整体密化次数为两次,初次密化取值点为bn,满足如下公式:
[0026][0027]
二次密化取值点为cn和dn,其中cn所在位置为an和bn等间距中间侧,dn所在位置为bn与an+1等间距中间侧,经过两次密化后整体数据量为原来的3倍,计算公式如下:
[0028][0029]
代入bn表示函数可得:
[0030]cn
=kan+(i*k+j)a
n-1
+i2a
n-2
+i*ja
n-3
[0031]
同理可得dn计算公式为:
[0032][0033]
代入bn表示函数可得:
[0034]dn
=(k2+i)an+k(i+j)a
n-1
+j(k+i)a
n-2
+j2a
n-3
[0035]
考虑拟合曲线的光滑性,采用二次项式插值,以上述节点做函数拟合,可得:
[0036][0037]
在二次函数拟合增强数据可信赖度的基础上,可实现预测功能,在预测值明显偏离正常值时可做到健康疾病提前预警。
[0038]
进一步的,为得出更准确插值结果,将三插值系数优选设置为:k=0.5,i=0.3,j=0.2。
附图说明
[0039]
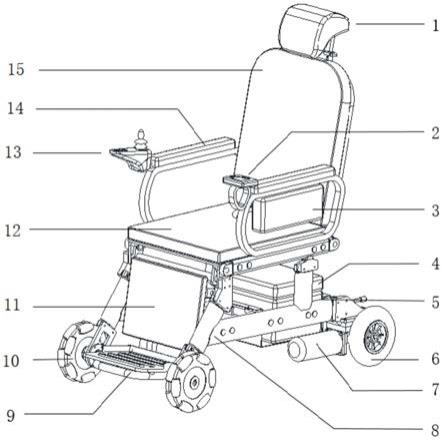
图1是本发明护理机器人的结构示意图。
[0040]
图2是本发明右侧控制摇杆的示意图。
[0041]
图3是本发明左侧检测箱的示意图。
[0042]
图4本发明底部控制单元的示意图。
[0043]
图5本发明初次密化示意图。
[0044]
图6本发明多权重插值及预测示意图。
[0045]
其中:1头枕、2显示模块、3检测箱、4控制箱、5电池组、6橡胶后轮、7驱动电机、8座架单元、9踏板、10全向轮、11腿垫、12座垫、13控制摇杆、14软扶手、15椅背垫。
具体实施方式
[0046]
下面结合附图和实施例对本发明作进一步的说明。
[0047]
本次设计的一种集成健康信息监测与预测的代步护理机器人(如图1所示):整体结构包括座架本体、运动单元和检测单元三大部分,座架本体满足实际乘坐需求,包括头枕1、后轮橡胶轮6、座架单元8、踏板9、前轮全向轮10、腿垫11、座垫12、软扶手14和椅背垫15。运动单元由电池组5、驱动电机7和控制摇杆13组成,其中前轮全向轮10转弯半径小,横向运动阻尼低,适合室内使用,控制摇杆方便老龄失能人群使用,移动速度可调,室内可调整至1档,室外移动可以调整至5档以加快行进速度。运动系统可有效替代老龄失能人口依赖护理人员行动的问题,减小护理压力。检测单元由显示模块2、检测箱3和控制箱4组成,检测箱3可方便打开,内部集成袖带式血压检测装置和心率血氧监测,显示模块2有测量信息显示屏和指示灯及操作按键。
[0048]
本设计中所选择材料均应满足无卤素要求且达到rohs认证标准。其中座架单元主体结构部分采用6061铝型材焊接成型,冷加工性能好,耐腐蚀和韧性高,方便后续上色膜。前轮臂、前梁、堵头、螺钉安装块、轴承套等均采用6061铝合金材料制造;转动前轮轴采用镀铬光圆,硬度高且耐磨耐腐蚀;脚踏安装板、隔套、轴承挡圈、轴端挡圈、踏板推座均采用不锈钢304;主要承载的座板及底撑、后轮撑焊组均采用q235-a碳素钢,综合性能较好;踏板9材质为塑料,简单耐用;腿垫11、座垫12、椅背垫15和软扶手14为定制,皮质外部,保证舒适性。
[0049]
右侧控制摇杆13采用带有eabs驻坡功能的24v万向摇杆智能控制器,人机界面带有led提示,驱动方式为pwm占空比调节和电子差速,带有控制器报警音。
[0050]
左侧为检测箱3,检测箱3可方便打开,内部装有袖带式血压检测装置和心率血氧监测模块,血压检测采用医院使用的准确性能较高的电子血压计,使用者将袖带从检测箱3中取出后,将气插嘴胶管连接好,通过显示模块2上的按键进行血压检测操作,测试结果也会在显示屏上展现。原理为示波法间接测量血压,在袖带放气或充气的过程中,感知脉搏波信息,并通过一系列复杂的转换和计算得到血压数据。心率检测采用ppg光电容积脉搏波描记法原理,通过袖带上装有的光电接收器,发射出绿光。光束发出后,皮肤、肌肉组织和血液都会吸收一部分,剩下的再被反射回接收器上。其中人体骨骼、皮肤及脂肪等结构对光的反射为固定值,而毛细血管和动静脉则随着心脏脉搏跳动不断变化,所以反射值在不停波动变化,而且血液倾向于反射红光而吸收绿光,因此心脏在收缩和舒张时会产生颜色不同的反射光,体现在接收端就是接收到的电信号也随着脉搏而变化。当心脏收缩时外周血容量最多光吸收量也最大,检测到的光强度最小。而在心脏舒张时,正好相反,检测到的光强度
最大,使光接收器接收到的光强度随之呈脉动性变化。通过算法我们可以解调出这个信号,再运用一定的算法,折算出心率。血氧监测则是采用反射式血氧传感器芯片,芯片中有两个发光二极管,分别将波长为669nm的红光和880nm的红外光射向腕部,另一侧的光电二极管就用来接收反射光线,通过发射与接收的光强差就可以计算出血氧的饱和度。所有检测的信息将会传输至控制箱3中存储单元,等待后续处理。
[0051]
座椅下为电池组5及控制箱4单元,其中电池组5采用标称容量40ah,标准电压dc24v的锂电池组,可保证一次充电最大行程6公里左右。充电器输入电压220v,50hz,输出电压为29.2v。输出电流为5a。
[0052]
控制箱4中的控制芯片采用stm32f103rct6系列,性能高,成本低,功耗低,主要实现功能为控制护理机器人的前进,后退及左右转动以及控制检测模块的开启关闭等。其中每次检测的数据也可汇总至此模块中,方便后续调用。控制箱4中还包括数据处理单元,数据处理单元首先是进行数据的存储,信息包括检测数据的类型,如血压、心率及血氧。其次是检测的时间信息,具体到天即可。最后便是数据值的大小,在超过正常设定区间时系统会自动报警提示,具体为血压值:收缩压90-140mmhg,舒张压60-90mmhg。心率为60-100次/分钟。血氧浓度﹥90%。在超过设定限时机器会自动提示,使用者可以考虑重新测量或者是换时段重复测量,保证结果准确。
[0053]
数据处理阶段,在测量数据超过一周后,对多组数据进行处理。对某一量进行一系列等精度测量,由于存在随机误差,其测得值皆不相同,应以全部测得值的算术平均值作为最后的测量结果。设l1,l2,
…
,ln为n次测量所得的值,则算术平均值
[0054][0055]
算术平均值与真值最为接近,由概率论大数定律可知,若测量次数无限增加,则算术平均值必然趋近于真值l0。其中称为残余误差。考虑测量为等精度测量,依据贝塞尔公式得出测量的标准差为:
[0056][0057]
转换为:
[0058][0059]
依据3σ准则判断处理后的数据信息是否存在粗大误差,并剔除其中可能存在粗大误差数据,保留剩余数据。
[0060]
基于多次测量值权重系数占比影响不同,在测量所得多组数据经过清洗过滤后,基于马尔可夫理论,综合考虑使用者的近三次测量数据对后续结果影响较大,故在两次测量数据中间进行数据密化,整体密化次数为两次,可将数据量提升至原来3倍,初次密化示意图如图5所示,密化取值点为bn,满足如下公式:
[0061][0062]
二次密化取值点为cn和dn。其中cn所在位置为an和bn等间距中间侧,dn所在位置为bn与an+1等间距中间侧,经过两次密化后整体数据量为原来的3倍,计算公式如下:
[0063][0064]
代入bn表示函数可得:
[0065]cn
=kan+(i*k+j)a
n-1
+i2a
n-2
+i*ja
n-3
[0066]
同理可得dn计算公式为:
[0067][0068]
代入bn表示函数可得:
[0069]dn
=(k2+i)an+k(i+j)a
n-1
+j(k+i)a
n-2
+j2a
n-3
[0070]
考虑拟合曲线的光滑性,采用二次项式插值,以上述节点做函数拟合,可得:
[0071][0072]
如图6所示,在二次函数拟合增强数据可信赖度的基础上,可实现预测功能,在预测值明显偏离正常值时可做到健康疾病提前预警。
[0073]
综合考虑多次测量健康信息的权重系数不同,经过多次实验测试,为得出更准确插值结果,将三系数设置为:k=0.5,i=0.3,j=0.2。
[0074]
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1