基于毫米波雷达的身份识别方法和系统与流程
基于毫米波雷达的身份识别方法和系统
【技术领域】
1.本发明涉及模式识别技术领域领域,更具体地,涉及一种基于毫米波雷达的身份识别方法和系统。
背景技术:
2.身份识别在安防监控、金融安全等信息安全领域有着巨大的应用前景,然而传统的身份识别方式存在易丢失、易被伪造的问题,如密码、令牌、指纹、人脸、语音等。生物识别技术利用人体固有生理信号难以复制这一特性,成为广受关注的新型身份识别方式。心跳引起的胸腔振动信号(心脏机械活动信号)是一种医学生理信号,心跳的模式取决于心脏的生物学特征和几何结构,存在很强的个体差异性,满足身份识别的必要特性,其次,心脏机械活动信号的监测具有活体检测的属性,可有效避免指模、照片、3d打印技术等仿制问题。
3.毫米波雷达可以通过监测心脏运动导致的胸腔微动,从而监测心脏的机械活动。通过心脏机械活动波形可以观察到一个完整的心跳运动周期由等容收缩(ic)、二尖瓣关闭(mc)、主动脉瓣打开(ao)、等容舒张(im)、主动脉瓣关闭(ac)、二尖瓣打开(mo)和舒张期快速充盈(rf)七个阶段组成。一个心跳周期内的胸腔振动模式因心脏的生物学特征和几何结构存在显著差异,可以作为监测对象的独特身份特征,且难以被窃取和仿制。此外,相较于现有的指纹、心电、心音等身份认证模式,基于毫米波雷达监测心脏机械活动的身份识别过程,具有无接触、远距离、环境噪声影响小的特点。中国专利cn108647961a公开了一种基于心电信号身份认证的数字货币钱包。包括心电锁硬件和心电锁钱包app。用户开启心电锁钱包app,则自动唤醒心电锁硬件,心电锁硬件采集用户心电信号,对其进行特征提取,并基于所提取的特征进行心电身份识别。其中,用户在操作期间需始终佩戴心电锁硬件用于心电信号的采集,所述心电锁硬件为心电锁手环,采用光电连续式心电传感器进行原始心电信号的采集。所述心电信号的特征为心拍的qrs波持续时间、r-r间隔和平均r-r间隔。中国专利cn101421744b公开了一种电-生物身份识别方法和设备。包括两个生物签名,第一个生物签名为特定个体心跳图形的表现与所存储的多个个体的心跳图形的共有特征之间的差异;第二个生物签名为所选个体心跳图形的表现与所存储的多个个体的心跳图形的共有特征之间的差异,其中,所述心跳图形为心电信号(ecg信号)波形。所述的ecg信号的采集方式为电极放置于用户固定的采集部位进行信号获取,这些部位包括臂和腿(包括手指和脚趾),用户在使用过程中左手的手指触摸第一传感器,同时右手的手指触摸另一个传感器,触摸的接触物通常为金属等导电介质。但是,cn101421744b需要采用电极贴片采集特定部位的电生理信号,cn108647961a需采用心电锁手环进行接触式的心电信号采集,用户使用心电锁钱包app时,需始终佩戴信号采集设备,这种接触式的设备并不适用于存在皮肤受损、传染性疾病或其他不宜佩戴信号采集设备的用户。其次,现有技术cn108647961a所述采集的心电信号特征为qrs波持续时间、r-r间隔和平均r-r间隔,所述关于持续时间的特征受用户当时的运动状态、心率、紧张情绪、服用药物的影响,会存在较大的波动,最终导致用户因运动、紧张情绪、服用药物等被拒绝使用心电锁钱包app。
4.可见,现有技术的上述方案中,存在用于身份识别的生物特征易被窃取、伪造、难以无接触式获取的问题。
技术实现要素:
5.为了克服上述现有技术的不足,利用心脏机械运动模式的唯一性和难以伪造的特点,本发明提供一种基于毫米波雷达的身份识别方法和系统。
6.一方面,本发明提出了一种基于毫米波雷达的身份识别方法,包括:
7.步骤1:利用毫米波雷达采集多条不同用户的雷达回波数据;
8.步骤2:将所采集到的雷达回波数据通过预处理的方式分解出雷达心脏机械活动波形数据rcg;
9.步骤3:对所述雷达心脏机械活动波形数据rcg进行心率估计和心拍定位;
10.步骤4:根据定位出的心拍位置,进行心拍切割和心拍对齐,最终生成当前用户的心拍模板;
11.步骤5:对所述当前用户心拍模板进行归一化处理;
12.步骤6:将所述当前用户归一化心拍模板与模板库中模板进行匹配和识别。
13.进一步的,在上述技术方案的基础上,所述步骤1还包括:
14.所采集的用户数量大于30人,并覆盖不同性别、不同年龄段和不同心率的人群;
15.数据采集的最短持续时间为20秒,采集方式为用户正对信号采集装置站立,距离为20cm-50cm之间。
16.进一步的,在上述技术方案的基础上,所述步骤2中的预处理包括以下处理方式:
17.波束成形、相位信息提取、相位解卷绕和带通滤波器滤波。
18.进一步的,在上述技术方案的基础上,所述步骤3还包括:
19.1)采用自相关函数acf的方式绘制步骤2所得的rcg信号的自相关acf曲线,用于估计心率hr,其中,将acf曲线中最高峰所对应的横坐标定义为rcg信号的心率hr;
20.2)将pan-tompkins算法中巴特沃斯带通滤波器的上、下限截止频率分别设置为8hz和20hz,识别rcg信号中的主动脉打开ao峰,生成ao峰序列,ao峰序列中元素记为aoi[i],其中i为ao峰序列中的顺序号,1≤i≤m,m为所述顺序号的最大值,计算相邻ao峰的间隔,间隔编号为相邻ao峰的顺序号的较大者,记为diff_aoi[j],其中,2≤j≤m,例如:diff_aoi[k]为aoi[k]与aoi[k-1]之间的间隔;
[0021]
若相邻ao峰间隔的均值mean_diff_aoi在[60
×
fs/hr-10,60
×
fs/hr+10]区间范围内,则判定当前rcg信号计算所得的ao峰序列有效,如果当前ao峰序列无效,则提示用户重新采集数据,直至所述ao峰序列满足上述有效的要求,有效ao峰序列的每个元素记为ao_loc[i],其中,所述fs为采样频率。
[0022]
进一步的,在上述技术方案的基础上,所述fs为100hz。
[0023]
进一步的,在上述技术方案的基础上,所述步骤4还包括:
[0024]
1)对步骤2中rcg信号进行高通滤波,采用巴特沃斯高通滤波器,其中参数选择为:归一化截止频率wn为0.08,用于增强ao峰,在[ao_loc[i]-10,ao_loc[i]+10]的区间范围内寻找最大值,进行ao峰位置微调,后续切割心拍时始终以所述ao峰为基准点,进行心拍的对齐;
[0025]
2)根据步骤3所得的心率hr计算出心拍的持续时间len_beat,计算公式为:
[0026]
len_beat=60 x fs/hr,
[0027]
将步骤3所得ao峰序列作为基准点,从点ao_loc[i]向前取m个采样点,向后取n个采样点,进行心跳切割,其中,所述m为0.35
×
len_beat的计算结果按照四舍五入得到的整数值,所述n为0.65
×
len_beat的计算结果按照四舍五入得到的整数值;
[0028]
3)将切割和对齐后的心拍进行平均,生成最终的心拍模板template_a。
[0029]
进一步的,在上述技术方案的基础上,所述步骤5还包括:
[0030]
1)用户以不同的角度和距离面对毫米波雷达,将步骤4所得的心拍模板template_a进行幅度的0-1归一化;
[0031]
2)若步骤4所得心拍模板template_a长度大于120个采样点,则采用降采样的方式,若template_a长度小于120个采样点,则采用升采样的方式处理当前心拍模板,使得心拍持续时间固定为120个采样点;
[0032]
3)最终得到当前用户的归一化心拍模板,记为template_norm。
[0033]
进一步的,在上述技术方案的基础上,所述步骤6还包括:
[0034]
1)将步骤5所述当前用户归一化模板template_norm与用户数据库中模板分别计算两个向量间的欧氏距离,并求和得到最终结果,记为d[n];
[0035]
2)将步骤5所述当前用户归一化模板template_norm与用户数据库中模板分别进行互相关计算,并求和得到计算结果,记为corr[n];
[0036]
3)获取步骤5所述当前用户归一化模板template_norm的ao峰幅度与用户数据库中模板ao峰的幅度之差,取绝对值后求和得到计算结果,记为amp[n];
[0037]
4)构建支持向量机svm分类器,选用径向基函数作为核函数,用过网格搜索确定径向基核的参数,将d[n]、corr[n]和amp[n]作为分类器的输入特征,将心拍模板分为正类和负类,所述正类代表授权用户,所述负类代表非授权用户;
[0038]
其中,n为所述用户数据库中模板的数量。
[0039]
另一方面,本发明还提出了一种基于毫米波雷达的身份识别系统,其特征在于包括:处理器、存储器和控制器,所述控制器控制毫米雷达波采集数据,所述存储器存储有程序代码的介质,当所述处理器系统读取所述介质存储的程序代码时,所述设备能够执行权利要求1-8任一项所述的方法。
[0040]
基于本发明的发明构思,能使得本发明获得如下有益的技术效果:
[0041]
1、非接触的特性:毫米波雷达可以通过非接触的监测心脏运动导致的胸腔微动,从而监测心脏的机械活动,用户只需正对毫米波雷达站立,即可在无接触的情况下采集用户的rcg信号,分析用户的心拍模板,用于身份认证。
[0042]
2、难以伪造的特性:心跳引起的胸腔振动信号(心脏机械活动信号)是一种医学生理信号,心跳的模式取决于心脏的生物学特征和几何结构,存在很强的个体差异性,满足身份识别的必要特性,其次,心脏机械活动信号的监测具有活体检测的属性,输入体内密钥,难以仿制。
[0043]
3、自适应的特性:对所计算出的心拍模板进行幅度和持续时间的归一化,排除用户以不同的角度和距离面对毫米波雷达,以及受用户当时的运动状态、心率、紧张情绪、服用药物等情况对心拍模板的影响。
【附图说明】
[0044]
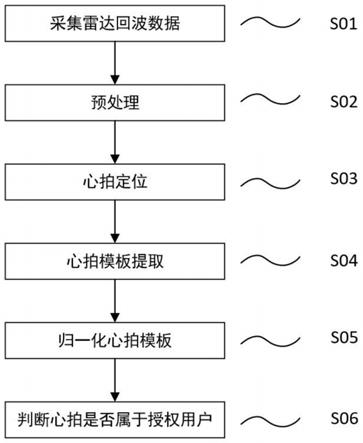
图1为本发明一优选实施例流程图。
【具体实施方式】
[0045]
为了便于理解,本具体实施方式是本发明提出的基于毫米波雷达的身份识别方法及系统的优选实施例,以详细说明本发明的结构和发明点,但并不作为本发明权利要求的限定保护范围。
[0046]
参见图1,为一个优选实施例的流程图,包括:
[0047]
步骤s01:采集雷达回波数据。具体的,利用毫米波雷达采集多条不同用户的雷达回波数据。所采集的用户数量超过30人,要求覆盖不同性别、不同年龄段、不同心率的人群。数据采集的最短持续时间为20s,采集方式为用户正对信号采集装置站立,距离为20cm-50cm之间均可,所述信号采集装置为毫米波雷达。将上述数据作为毫米波雷达身份识别的实验数据。
[0048]
步骤s02:预处理。具体的,将步骤s01所采集到的雷达回波数据通过预处理的方式分解出雷达心脏机械活动波形数据(rcg)。预处理部分包括波束成形、相位信息提取、相位解卷绕、带通滤波器滤波。
[0049]
其中,波束成形,包括根据雷达天线的排布情况,将各个雷达天线的回波信号进行加权;相位信息提取,包括提取目标位置处相位随时间变化的信号;相位解卷绕,包括使得相位w在π处不发生跳变;带通滤波器滤波,包括使用巴特沃斯带通滤波器对相位信号进行滤波,以分解出心脏机械振动波形,带通滤波器上、下限截止频率分别设置为0.8hz和45hz。
[0050]
步骤s03:心拍定位。对步骤s02的心脏机械活动波形数据(rcg)进行心率估计和心拍定位。其中包括:
[0051]
1)采用自相关函数acf的方式绘制出步骤s02所得rcg信号的自相关acf曲线,用于估计心率hr。其中,将acf曲线中最高峰所对应的横坐标定义为rcg信号的心率hr。
[0052]
2)采用pan-tompkins算法检测ao峰位置,对针对心电信号(ecg)的r波检测的pan-tompkins进行优化改进,本实施例将pan-tompkins算法中巴特沃斯带通滤波器的上、下限截止频率由传统的5hz、11hz更改为8hz、20hz,使之更适用于本实施例所针对的毫米波雷达采集的rcg信号,继而识别rcg信号中的ao峰。计算相邻ao峰的间隔,记为diff_aoi。若相邻ao峰间隔的均值mean_diff_aoi在[60*fs/hr-10,60*fs/hr+10]范围内,其中,fs为采样频率,本实施例中,fs可优选为100hz,则判定当前rcg信号计算所得ao峰序列有效,记为ao_loc。
[0053]
步骤s04:心拍模板提取。具体的根据步骤s03定位出的心拍位置,进行心拍切割和心拍对齐,最终生成当前用户的心拍模板。其中包括:
[0054]
1)对步骤s02中rcg信号进行高通滤波,归一化截止频率为0.08,用于增强ao峰,在[ao_loc[i]-10,ao_loc[i]+10]的区间范围内寻找局部最大值,进行ao峰位置微调,后续切割心拍时始终以ao峰位基准点,方便心拍的对齐。
[0055]
2)根据步骤s03所得的心率hr计算出心拍的持续时间len_beat,按照len_beat=60*fs/hr计算,将步骤s03所得ao峰序列ao_loc作为基准点,从点ao_loc[i]向前取0.35
×
len_beat(其计算结果按照四舍五入取整)个采样点,向后取0.65
×
len_beat其计算结果按
照四舍五入取整)个采样点,进行心跳切割。
[0056]
3)将切割和对齐后的心拍进行平均,生成最终的心拍模板template_a,以减少偶尔不一致的周期和为运动造成的噪声影响。
[0057]
步骤s05:归一化心拍模板。对步骤s04所得的当前用户心拍模板进行归一化处理。其中包括:
[0058]
1)用户以不同的角度和距离面对毫米波雷达,所采集到的信号振幅会有微小的变化,为了使得不同条件下采集到的心拍模板可以具有可比的振幅,将步骤s04所得心拍模板template_a进行幅度的[0,1]归一化。
[0059]
2)为了排除心跳模式包含的内在心率变异性和不同运动状态对心率的影响,即对心拍持续时间的影响,固定心拍持续时间为120个采样点,若步骤4所得心拍模板template_a长度大于120个采样点,则采用降采样的方式,若template_a长度小于120个采样点,则采用升采样的方式处理当前心拍模板,在不改变波形形态的前提下统一心拍模板的持续时间。
[0060]
3)最终得到当前用户的归一化心拍模板,记为template_norm。
[0061]
步骤s06:判断心拍是否属于授权用户。将步骤s05所得的当前用户归一化心拍模板与模板库中模板进行匹配和识别。其中包括:
[0062]
1)将步骤s05所得当前用户归一化模板template_norm与用户数据库中模板分别计算两个向量间的欧氏距离,并求和得到最终结果,记为d[n]。
[0063]
2)将步骤s05所得当前用户归一化模板template_norm与用户数据库中模板分别进行互相关计算,并求和得到计算结果,记为corr[n]。
[0064]
3)获取步骤s05所得当前用户归一化模板template_norm的ao峰幅度与用户数据库中模板ao峰的幅度之差,取绝对值后求和得到计算结果,记为amp[n]。
[0065]
4)构建svm分类器,选用径向基函数作为核函数,用过网格搜索确定径向基核的参数。将d[n]、corr[n]和amp[n]作为分类器的输入特征,将心拍模板分为正类(授权用户)和负类(未授权用户),分类器可以计算出当前用户的心拍模板属于正类的可能性,若当前用户的心拍特征与授权用户的适应性较低,则将其判定为负类。
[0066]
以上是本发明的一些具体实施方式,但本发明并不仅局限于上述方式,所有对本发明技术特征的简单变换,凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1