用于治疗呼吸病症的设备的制作方法
用于治疗呼吸病症的设备
1.本专利文件公开的一部分包含受版权保护的材料。版权所有者不反对由任何人以专利文件或专利公开出现在专利局文档或记录中的形式复制这些专利文件或专利公开,但是另外保留任何所有版权权利。
2.1相关专利申请的交叉引用
3.本技术要求于2020年4月16日提交的美国临时申请第63/011,052 号和于2020年7月6日提交的美国临时申请第63/048,535号的优先权,其中的每一个临时申请的全部内容通过引用并入本文。
2
背景技术:
2.1技术领域
4.本技术涉及呼吸相关疾病的筛查、诊断、监测、治疗、预防和改善中的一者或多者。本技术还涉及医疗装置或设备及其用途。
5.2.2相关技术描述
6.2.2.1人类呼吸系统及其障碍
7.人体的呼吸系统促进气体交换。鼻和嘴形成患者的气道入口。
8.气道包括一系列分支管,当分支气管穿透更深入肺部时,其变得更窄、更短且更多。肺部的主要功能是气体交换,从而允许氧气从吸入空气进入静脉血并以相反方向排出二氧化碳。气管分成左主支气管和右主支气管,它们最终再分成端部细支气管。支气管构成传导气道,但是并不参与气体交换。气道的进一步分支通向呼吸细支气管,并最终通向肺泡。肺部的肺泡区域为发生气体交换的区域,且称为呼吸区。见2012年由john b.west、lippincott williams&wilkins出版的《呼吸系统生理学(respiratory physiology)》,第9版。
9.存在一系列呼吸障碍。某些障碍可以以特定事件为特征,例如呼吸暂停、呼吸不足和呼吸过度。
10.呼吸障碍的实例包括阻塞性睡眠呼吸暂停(osa)、潮式呼吸 (csr)、呼吸功能不全、肥胖换气过度综合征(ohs)、慢性阻塞性肺病(copd)、神经肌肉疾病(nmd)和胸壁障碍。
11.阻塞性睡眠呼吸中止症(osa)是一种睡眠呼吸障碍(sdb)形式,其特征在于包括上气道在睡眠期间的闭塞或阻塞的事件。其起因于睡眠期间异常小的上气道和肌肉张力在舌、软腭及后口咽壁的区域中的正常损失的组合。该病症导致受影响患者停止呼吸,典型地持续 30秒至120秒的时间段,有时每晚200次至300次。这常常导致过度日间嗜睡,并可导致心血管疾病和脑损伤。并发症状为常见障碍,尤其在中年超重男性中,但是受到影响的人可能并未意识到这个问题。见美国专利no.4,944,310(sullivan)。
12.潮式呼吸(csr)是另一种睡眠呼吸障碍形式。csr是患者呼吸控制器的失调,其中存在称为csr循环的盛衰通气的律动交替周期。 csr的特征在于动脉血的重复性缺氧和复氧。由于重复性氧不足,所以csr有可能是有害的。在一些患者中,csr与从睡眠中重复性觉
醒相关,这导致严重的睡眠中断、增加的交感神经活动,以及后负荷增加。参见美国专利no.6,532,959(berthon-jones)。
13.呼吸衰竭是呼吸障碍的涵盖性术语,其中肺部不能吸入足够的氧气或者呼出足够的co2来满足患者的需要。呼吸衰竭可涵盖以下障碍中的一些或全部。
14.患有呼吸功能不全(一种形式的呼吸衰竭)的患者在锻炼时可能经历异常的呼吸短促。
15.肥胖通气过度综合征(ohs)被定义为严重肥胖和清醒时慢性高碳酸血症的组合,不存在通气不足的其他已知原因。症状包括呼吸困难、晨起头痛和过度日间嗜睡。
16.慢性阻塞性肺疾病(copd)涵盖具有某些共同特征的一组下气道疾病中的任何一种。这些疾病包括空气流动阻力增加、呼吸的呼气阶段延长,以及肺的正常弹性丧失。copd的实例为肺气肿和慢性支气管炎。copd由慢性吸烟(主要风险因素)、职业暴露、空气污染和遗传因素所引起。症状包括:劳力性呼吸困难、慢性咳嗽和产生痰液。
17.神经肌肉疾病(nmd)是一个广泛的术语,其涵盖直接通过内在肌肉病理学或间接通过神经病理学损害肌肉功能的许多疾病和病痛。一些nmd患者的特征在于进行性肌肉损伤,其导致行走能力丧失、乘坐轮椅、吞咽困难、呼吸肌无力,并最终死于呼吸衰竭。神经肌肉障碍可分为快速进行性和慢进行性:(i)快速进行性障碍:特征在于肌肉损伤历经数月恶化,且在几年内导致死亡(例如,青少年中的肌萎缩性侧索硬化(als)和杜氏肌肉营养不良症(dmd);(ii)可变或慢进行性障碍:特征在于肌肉损伤历经数年恶化,且仅轻微缩短预期寿命(例如,肢带型、面肩肱型和强直性肌肉营养不良症)。nmd的呼吸衰竭的症状包括:渐增的全身虚弱、吞咽困难、运动中和休息时呼吸困难、疲惫、嗜睡、晨起头痛,以及注意力难以集中和情绪变化。
18.胸壁是一组导致呼吸肌与胸廓之间无效率联接的胸廓畸形。这些障碍通常特征在于限制性缺陷,并且具有长期高碳酸血症性呼吸衰竭的可能。脊柱侧凸和/或脊柱后侧凸可引起严重的呼吸衰竭。呼吸衰竭的症状包括:运动中呼吸困难、外周水肿、端坐呼吸、反复胸部感染、晨起头痛、疲惫、睡眠质量差以及食欲不振。
19.已经使用一系列治疗来治疗或改善此类病状。此外,其他健康个体可利用此类治疗来预防出现呼吸障碍。然而,这些治疗具有许多缺点。
20.2.2.2治疗
21.各种治疗,诸如持续气道正压通气(cpap)治疗、无创通气(niv) 和有创通气(iv)已经用于治疗上述呼吸障碍中的一种或多种。
22.持续气道正压通气(cpap)治疗已被用于治疗阻塞性睡眠呼吸中止症(osa)。作用机制是连续气道正压通气充当气动夹板,并且可以诸如通过向前并远离后口咽壁推挤软腭和舌来防止上气道闭塞。通过cpap治疗的osa的治疗可以是自愿的,因此如果患者发现用于提供此类治疗的装置为:不舒适、难以使用、昂贵和不美观中的任何一者或多者,则患者可选择不依从治疗。
23.无创通气(niv)通过上气道向患者提供通气支持以帮助患者呼吸和/或通过完成呼吸功中的一些或全部来维持身体内适当的氧水平。通气支持经由无创患者接口提供。niv已用于治疗csr和呼吸衰竭,其呈诸如ohs、copd、nmd和胸壁障碍的形式。在一些形式中,可以改善这些治疗的舒适性和有效性。
24.有创通气(iv)为不能够自己有效呼吸的患者提供通气支持,并且可以使用气切管提供。在一些形式中,可以改善这些治疗的舒适性和有效性。
25.2.2.3治疗系统
26.这些治疗可以由治疗系统或装置提供。此类系统和装置也可以用于筛查、诊断、或监测病症而不治疗它。
27.治疗系统可以包括呼吸压力治疗装置(rpt装置)、空气回路、湿化器、患者接口和数据管理。
28.治疗系统的另一种形式是下颌再定位装置。
29.2.2.3.1患者接口
30.患者接口可用于将呼吸设备接合到其佩戴者,例如通过向气道的入口提供空气流。空气流可以经由面罩提供到患者鼻和/或嘴里、经由管提供到嘴里,或经由气切管提供到患者的气管中。根据待施加的治疗,患者接口可与例如患者面部的区域形成密封,从而有利于气体以与环境压力有足够差异的压力(例如,相对于环境压力大约10cmh2o 的正压)进行的输送,以实现治疗。对于其他形式的治疗,诸如氧气输送,患者接口可以不包括足以有利于将约10cmh2o的正压下的气体供给输送至气道的密封。
31.某些其他面罩系统可能在功能上不适用于本领域。例如,单纯的装饰性面罩可能不能维持适合的压力。用于水下游泳或潜水的面罩系统可被构造成防止水从外部高压流入,而非在内部维持比环境高的压力下的空气。
32.某些面罩可能在临床上不利于本技术,例如在它们阻挡气流通过鼻并且仅允许它通过嘴的情况下。
33.如果某些面罩要求患者将一部分面罩结构插入他们的嘴中以通过其嘴唇产生并保持密封,则对于本技术可能是不舒服的或不切实际的。
34.某些面罩可能对于在睡眠时使用是不能实现的,例如在头在枕头上侧卧在床上睡眠时。
35.患者接口的设计提出了若干挑战。面部具有复杂的三维形状。鼻的大小和形状显著地因人而异。由于头部包括骨、软骨以及软组织,所以面部的不同区域对机械力反应不同。下颌或下颌骨可以相对于头骨的其他骨骼移动。整个头部可以在呼吸治疗时间段的过程中移动。
36.由于这些挑战,一些面罩面临以下问题中的一个或多个:突兀、不美观、昂贵、不相称、难以使用以及特别是当佩戴很长一段时间时或者当患者不熟悉系统时不舒适。错误尺寸的面罩可能导致降低的顺应性、降低的舒适度和较差的患者结果。仅设计用于飞行员的面罩、设计成为个人防护设备的一部分的面罩(例如过滤面罩)、scuba面罩,或设计用于施加麻醉剂的面罩对于其原始应用是可以接受的,但是对于长时期(例如几个小时)佩戴,此类面罩却没有理想的那么舒适。这种不适可能导致患者对治疗的依从性降低。如果在睡眠期间佩戴面罩,则更是如此。
37.假设患者依从治疗,则cpap治疗对治疗某些呼吸障碍非常有效。如果面罩不舒适或难以使用,则患者可能不依从治疗。由于常常建议患者定期清洗他们的面罩,如果面罩难以清洗(例如,难以组装或拆卸),则患者可能不会清洗他们的面罩,这可能影响患者的依从性。
38.虽然用于其他应用(例如飞行员)的面罩可不适合用于治疗睡眠呼吸障碍,但是经设计用于治疗睡眠呼吸障碍的面罩可以适用于其他应用。
39.基于这些原因,用于在睡眠期间输送cpap的患者接口形成了不同的领域。
40.2.2.3.2呼吸压力治疗(rpt)装置
41.呼吸压力治疗(rpt)装置可单独使用或作为系统的一部分使用以递送上述多种治疗中的一种或多种,例如通过运行装置以产生用于传送至气道接口的空气流。空气流可以被加压。rpt装置的示例包括 cpap装置和呼吸机。
42.空气压力发生器在一系列应用中是已知的,例如工业规模的通气系统。然而,医学应用的空气压力发生器具有未由更普遍的空气压力发生器满足的特定要求,诸如医疗装置的可靠性、大小和重量要求。此外,即使被设计用于医疗的装置也可具有关于以下一个或多个的缺点:舒适性、噪声、易用性、功效、大小、重量、可制造性、成本和可靠性。
43.某些rpt装置的特殊要求的实例是噪声。
44.现有rpt装置的噪声输出级别表(仅为一个样本,在cpap模式下使用iso 3744中规定的测试方法在10cmh2o下测量)。
45.rpt装置名称a加权的声压电平db(a)年(大约)c系列tango
tm
31.92007带湿化器的c系列tango
tm
33.12007s8 escape
tm ii30.52005带h4i
tm
湿化器的s8 escapetm ii31.12005s9 autoset
tm
26.52010带h5i湿化器的s9 autoset
tm
28.62010
46.一种已知的用于治疗睡眠呼吸障碍的rpt装置是由瑞思迈有限公司(resmed limited)制造的s9睡眠治疗系统。rpt装置的另一个实例是呼吸机。呼吸机诸如瑞思迈stellar
tm
系列的成人和儿科呼吸机可以为一系列患者为对创伤性和无创性非依赖性通气提供支持以用于治疗多种病状,诸如但不限于nmd、ohs和copd。
47.瑞思迈elis
éetm 150呼吸机和瑞思迈vs iii
tm
呼吸机可为适合成人或儿科患者的创伤性和无创性依赖性通气提供支持以用于治疗多种病状。这些呼吸机提供具有单分支或双分支回路的体积和气压通气模式。 rpt装置通常包括压力发生器,诸如电动机驱动的鼓风机或压缩气体贮存器,并且被配置为将空气流供应至患者的气道。在一些情况下,可在正压下将空气流供应到患者的气道。rpt装置的出口经由空气回路连接到诸如上文所述的患者接口。
48.装置的设计者可能呈现了可做出的无限数目的选择。设计标准常常发生冲突,这意味着某些设计选择远非常规或不可避免。此外,某些方面的舒适性和功效可能对一个或多个参数方面的小且微妙的改变高度敏感。
49.2.2.3.3湿化器
50.输送没有加湿的空气流可能导致气道干燥。使用具有rpt装置和患者接口的湿化器产生加湿气体,使鼻黏膜的干燥最小化并增加患者气道舒适度。此外,在较冷的气候中,通常施加到患者接口中和患者接口周围的面部区域的暖空气比冷空气更舒适。
51.一系列人工湿化装置和系统是已知的,然而它们可能不能满足医用湿化器的专门
要求。
52.在需要时,通常在患者可能睡着或休息处(例如在医院),医用湿化器用于增加空气流相对于环境空气的湿度和/或温度。用于床边放置的医用湿化器可以很小。医用湿化器可以被配置为仅加湿和/或加热输送至患者的空气流,而不加湿和/或加热患者的周围环境。基于房间的系统(例如桑拿浴室、空气调节器或蒸发冷却器),例如,也可以加湿患者呼吸的空气,然而这些系统也会加湿和/或加热整个房间,这可能引起居住者的不适。此外,医用湿化器可具有比工业湿化器更严格的安全限制。
53.2.2.3.4声学分析
54.患者、护理人员、临床医生、保险公司或技术人员可能希望收集与呼吸治疗相关的数据,无论这些数据是与患者、用于治疗的单个部件还是整个治疗系统相关。存在的在向患者提供呼吸治疗时的许多情形中,其中涉及的一方或多方可以得利于收集治疗相关数据,并利用所收集的数据。
55.特别是,为了有效治疗,呼吸治疗系统的一些部件需要以比其他部件更高的频率更换。例如,一些患者在数月(例如3个月)内可以更换包括硅树脂密封形成部分的患者接口,而治疗装置可以每隔几年 (例如3年)更换或升级。对于那些需要以相对频繁的间隔进行更换的部件(例如,患者接口),患者或护理人员经常面临的挑战是,当他们的部件需要更换时,需要以低成本可靠且准确地得到通知。当更换新部件时,患者或护理人员可能需要更改治疗系统中的一个或多个设置(例如rt装置中的软件设置),以确保系统充分利用新部件。识别呼吸治疗系统部件的能力因此对于优化治疗和让患者和护理人员了解更换时间来说非常重要。
56.一种解决方案是通过声学方式来配置装置以识别作为其一部分的呼吸治疗系统的部件。特别是,此类装置包括被配置为分析来自系统部件的声反射的结构和过程,以比先前已知的更准确的方式从它们的“声波标记图”中识别那些部件。
57.在此类装置中,麦克风被定位和配置为感测空气回路中的声音。对来自麦克风的声音进行分析,以生成系统部件的声波标记图,从而识别它们。
58.随时间推移,有三个问题会影响音质与装置之间的一致性:由于制造公差造成的麦克风与空气回路相对位置的变化;声音向周围环境的逃逸;和装置在使用过程中传递到麦克风的振动。因此,需要一种将麦克风联接至空气回路的改进方法。
3
技术实现要素:
59.本技术旨在提供用于筛查、诊断、监测、改善、治疗或预防呼吸障碍的医疗装置,其具有改善的舒适性、成本、功效、易用性和可制造性中的一者或多者。
60.本技术的第一方面涉及用于筛查、诊断、监测、改善、治疗或预防呼吸障碍的设备。
61.本技术的另一方面涉及用于筛查、诊断、监测、改善、治疗或预防呼吸障碍的方法。
62.本技术的某些形式的一方面是提供改善患者对呼吸治疗的依从性的方法和/或设备。
63.本技术的一种形式的一方面是一种制造设备的方法。
64.本技术的某些形式的一方面是一种易于使用的医疗装置,例如,由没有受过医疗培训的人、由敏捷度和视力有限的人、或者由使用这种类型的医疗装置的经验有限的人使
用。
65.本技术的一种形式的一方面是一种便携式rpt装置,其可以由人携带,例如,在人的家中。
66.本技术的一种形式的一方面是一种患者接口,其可以在患者家里,例如,在肥皂水中清洗,而不需要专门的清洁设备。本技术的一种形式的一方面是一种湿化器罐,其可以在患者家里,例如,在肥皂水中清洗,而不需要专门的清洁设备。
67.本技术的一方面涉及一种用于将空气输送管联接至呼吸治疗设备的中间部件。呼吸治疗设备可以包括压力发生器和/或水贮存器,空气输送管经由中间部件联接至该压力发生器和/或水贮存器。在更广泛的情况下,中间部件可以包括位于空气流路径(空气路径)中或者与空气流路径流体连通的任何独立部件或部件的一部分,以便接收来自空气路径的声音。中间部件可以是可移除的、可更换的和/或可清洁的。在特定方面中,其中中间部件将水贮存器联接至空气输送管,表述“中间部件”中的术语“中间”可以指这种联接。然而,它也可以指这样的事实,即至少在所描述的技术的一些特定方面,该部件位于声源与声音传感器之间,并提供它们之间的链接。
68.在前述方面的示例中,水贮存器可以包括被构造为盛装一定体积的水并接收可呼吸气体流的空腔,空气输送管可以被配置为将已经在水贮存器中加湿的可呼吸气体流传至患者接口,并且中间部件可以包括:(a)出口端,其被配置为将空气输送管连接到中间部件;(b) 入口端,其被配置为将水贮存器连接到中间部件,入口端的中心轴与出口端的中心轴成大于零的角度;(c)声音端口,其被配置为促进声音在中间部件的外侧传播;(d)围绕声音端口安放的端口密封件,其被配置为在中间部件的外表面上提供周边密封形成件,并且包括被配置为覆盖端口的透声膜;(e)膜与中间部件的内表面共面;(f)膜不渗透液体和/或气体;(g)周边密封形成件包括被配置为底架的脊,中间部件插入该底架中;(h)脊在中间部件的外表面上方0.4至0.8mm 之间处延伸;(i)周边密封形成件包括从端口的周边向端口的中心轴延伸的唇;(j)唇在中间部件的外表面上方0.4至0.8mm之间处延伸;和/或(k)唇在端口上方从端口的周边以一定角度延伸。
69.本技术的一种形式的一方面涉及一种中间部件,该中间部件用于将空气输送管联接至呼吸治疗设备,空气输送管被配置为将呼吸治疗设备提供的可呼吸气体输送到患者接口,该中间部件包括:出口端,其被配置为将空气输送管连接到中间部件;入口端,其被配置为将呼吸治疗设备连接到中间部件,其中,入口端的中心轴与出口端的中心轴成大于零的角度;被配置为促进声音在中间部件的外侧传播的声音端口;以及围绕声音端口安放的端口密封件,其被配置为在中间部件的外表面上提供周边密封形成件,并且包括被配置为覆盖端口的透声膜。
70.在前述方面的示例中:(a)膜与中间部件的内表面共面;(b) 膜不渗透液体和/或气体;(c)外周密封形成件包括被配置为底架的脊,中间部件插入该底架中;(d)脊在中间部件的外表面上方0.4mm至 0.8mm之间延伸;(e)外周边密封形成件包括从端口的周边向端口的中心轴延伸的唇;(f)唇在中间部件的外表面上方0.4至0.8mm之间处延伸;(g)唇在端口上方从端口的周边以一定角度延伸;和/或(h) 入口端被配置为连接到安放在呼吸治疗设备中的水贮存器,并且该水贮存器包括空腔,该空腔被构造为盛装一定体积的水,并经由中间部件向空气输送管提供已经加湿的可呼吸气体流。
71.本技术的一种形式的一方面涉及一种用于治疗呼吸病症的设备,该设备包括:压力发生器,其被配置为产生可呼吸气体流;空气输送管,其被配置为将来自压力发生器的可呼吸气体流传至患者接口;中间部件,其被配置为气动地将空气输送管连接到压力发生器,该中间部件包括被配置为促进声音在中间部件的外侧传播的端口;声音传感器,其安放在中间部件的外侧且邻近中间部件的端口,该声音传感器被配置为感测在中间部件外侧传播的声音;和控制器。该控制器被配置为:接收由声音传感器由于在设备运行过程中感测到声音而产生的声音信号,分析所接收的声音信号,以及至少部分地基于分析来实现响应。
72.在前述方面的示例中:(a)响应包括以下各项中的至少一项:记录分析的结果,显示分析的结果,转发分析的结果,以及至少部分基于分析来控制压力发生器的运行;(b)还包括:水贮存器,其包括空腔,该空腔被构造为盛装一定体积的水并接收可呼吸气体流,使得呼吸气体流在传至患者接口之前被加湿;以及还包括水贮存器底座,其被构造和布置为在运行位置接收水贮存器,其中;中间部件可移除地联接至水贮存器底座,以便接收加湿的可呼吸气体流并将其传至空气输送管;(c)该设备包括底架,该底架包括底架开口,其中,中间部件中的端口位于底架开口的第一侧上,并且声音传感器定位在底架开口的第二侧上;(d)传感器和端口中的至少一者相对于底架开口对准; (e)该设备包括膜和端口密封件中的至少一者,该膜被配置为覆盖端口并将声音从中间部件的内侧传递到中间部件的外侧,并且该端口密封件被安放成以便在端口与底架开口之间提供密封接合;(f)膜和端口密封件包括永久附接到端口的整体;(g)中间部件是大致管状形状,并且水贮存器底座包括用于接收中间部件的大致管状开口,中间部件和大致管状开口被配置为用于中间部件大致无摩擦地插入开口;(h) 中间部件和管状开口中的至少一者包括一个或多个接合形成件,该接合形成件被布置为使得在中间部件插入开口的过程中,在插入路径的端部的近侧,接合形成件中的至少一个的接合使中间部件进入其运行配置,在该运行配置中,端口密封件将端口和底架开口两者密封,并且其中,端口密封件与端口和底架的密封接合以及由至少一个接合形成件实现的支撑接合中的至少一种被配置为在没有明显外力的情况下阻止中间部件从其运行配置中移开;(i)一个或多个接合形成件包括抬高特征;(j)还包括被配置为包围端口的端口密封件,其中,端口密封件包括周边密封形成件,该周边密封形成件包括脊,该脊被配置为当中间部件联接至湿化器时,邻接底架的围绕底架开口的表面;(k) 脊在中间部件的外表面上方0.4至0.8mm之间处延伸;(l)还包括被配置为包括端口的端口密封件,其中,端口密封件包括周边密封形成件,该周边密封形成件包括唇,该唇被配置为当中间部件联接至湿化器时,邻接底架的围绕底架开口的表面;(m)唇在中间部件的外表面上方0.4至0.8mm之间处延伸;(n)其中,唇在端口上方从端口的周边以一定角度延伸并朝向端口的中心轴延伸;(o)端口密封件覆盖端口的内表面,并且包括膜;(p)膜至少与中间部件的内表面或外表面共面;(q)膜不渗透液体和/或气体;(r)控制器被配置为基于分析来确定空气输送管或患者接口的特性;(s)控制器还被配置为基于分析来确定空气输送管的类型或大小,或者联接至空气输送管的患者接口的类型或大小;(t)中间部件包括被配置为将空气输送管连接到中间部件的出口端和被配置为将水贮存器连接到中间部件的入口端,其中,入口端的中心轴基本上横向于出口端的中心轴;(u)中间部件的入口端处的内角是圆的;(v)内角包括波纹管,该波纹管包括波纹管相对侧之间的跨度,该跨度等于或小于内角半径的两倍;(w)内角包括半径为0.2-5mm的曲率;(x)水贮存器包括出口管,该出口管包括用于将加
湿的可呼吸气体流输送到空气输送管的出口,并且中间部件包括适于与水贮存器的出口管形成密封的入口密封件;(y)中间部件包括出口端,并且空气输送管包括底座连接头,该底座连接头包括适于与中间部件的出口端形成密封的径向唇密封件,以气动地将空气输送管连接到中间部件;(z)该设备,其中,中间部件中的端口的中心轴大致与底架开口的第一侧上的底架开口的中心轴对齐,并且声音传感器定位在底架开口的第二侧上距离底架开口小于2mm处;(aa)传感器大致与端口和底架的中心轴对齐,(ab)中间部件被配置为气动地将空气输送管连接到水贮存器,并且机械地将空气输送管连接到水贮存器底座;(ac)空气输送管被配置为与贮存器底座电连接;(ad) 空气输送管被配置为当空气输送管连接到中间部件时,同时形成机械和电连接;(ae)空气输送管包括底座连接头,该底座接头包括保持凸块,该保持凸块适于接合在提供给中间部件的相应孔内,以机械地将空气输送管连接到中间部件;和/或(af)该设备还包括转换器,该转换器被配置为产生表示空气流的属性的流信号,其中,控制器被配置为;控制压力发生器的运行;以及在压力发生器运行过程中;接收来自转换器的流信号和由声音传感器感测的声音信号;分析所接收的声音信号;以及至少部分地基于分析和流信号来修改压力发生器的运行。
73.本技术的一种形式的一方面涉及一种中间部件,该中间部件用于将空气输送管联接至呼吸治疗设备,空气输送管被配置为将呼吸治疗设备提供的可呼吸气体输送到患者接口,该中间部件包括:出口端,其被配置为将空气输送管连接到中间部件;入口端,其被配置为将呼吸治疗设备连接到中间部件;以及声音端口,其被配置为促进声音在中间部件的外侧传播。
74.在前述方面的示例中:(a)还包括以下各项中的至少一项:被配置为覆盖端口的透声膜,和围绕声音端口安放的端口密封件,该端口密封件被配置为在中间部件的外表面上提供周边密封形成件;(b)入口端的中心轴与出口的中心轴成大于零的角度;(c)膜与中间部件的内表面共面;(d)膜不渗透液体和/或气体;(e)周边密封形成件包括脊,该脊被配置为抵靠水贮存器底座的壁中的开口密封声音端口,中间部件插入该开口中;(f)脊在中间部件的外表面上方0.4至0.8mm 之间处延伸;(g)周边密封形成件包括从端口的周边向端口的中心轴延伸的唇;(h)唇在中间部件的外表面上方0.4至0.8mm之间处延伸; (i)唇在端口上方从端口的周边以一定角度延伸;(j)入口端被配置为连接到安放在呼吸治疗设备中的水贮存器,并且水贮存器包括空腔,该空腔被构造为盛装一定体积的水,并经由中间部件向空气输送管提供已经加湿的可呼吸气体流;和/或(k)其中,以下各项中的至少两项彼此横向:中间部件入口端的中心轴、中间部件出口端的中心轴和端口的中心轴。
75.本技术的一种形式的一方面涉及一种设备,该设备包括:压力发生器,其被配置为产生可呼吸气体流;水贮存器,其包括被构造为盛装一定体积的水并接收可呼吸气流的空腔;水贮存器底座,其被构造和布置为在运行位置中接收水贮存器;空气输送管,其被配置为将已经在水贮存器中加湿的可呼吸气体流传至患者接口;可移除地联接至水贮存器底座的中间部件,其被配置为将空气输送管连接到水贮存器,并且包括被配置为促进声音在中间部件的外侧传播的端口;邻近中间部件的端口安放的声音传感器,其被配置为接收从空气输送管和水贮存器传播到中间部件中的声音;和电路,其被配置为在压力发生器的运行过程中接收由声音传感器感测的声音信号,分析所接收的声音信号,以及至少部分基于分析来控制压力发生器的运行。
76.在前述方面的示例中:(a)中间部件被配置为气动地将空气输送管连接到水贮存器,并且机械地将空气输送管连接到水贮存器底座; (b)还包括底架,该底架连接到水贮存器底座并包括底架开口,其中,中间部件中的端口在底架开口的第一侧上与底架开口对准,并且声音传感器定位在底架开口的第二侧上;(c)还包括围绕端口安放的端口密封件,该端口密封件被配置为在中间部件的外表面上提供周边密封形成件;(d)周边密封形成件包括脊,该脊被配置为邻接底架的围绕底架开口的的表面,该底架联接至水贮存器底座;(e)脊在中间部件的外表面上方0.4至0.8mm之间处延伸;(f)当中间部件处于运行位置时,脊被抵靠底架的表面压缩,并且被配置为防止中间部件在没有足够的力的情况下拆卸;(g)周边密封形成件包括唇,该唇被配置为邻接底架的围绕底架开口的表面,该底架联接至水贮存器底座;(h) 唇在中间部件的外表面上方0.4至0.8mm之间延伸;(i)唇从端口的侧面延伸并在端口的至少一部分上方延伸,当中间部件处于运行位置时,唇在端口上方延伸的部分向下偏斜,并且被配置为防止中间部件在没有足够的力的情况下拆卸;(j)唇在端口上方从端口的周边以一定角度延伸并朝向端口的中心轴延伸;(k)端口密封件覆盖端口的内表面,并且包括被配置为覆盖端口并将声音从中间部件内侧传递到中间部件外侧的膜;(l)膜与中间部件的内表面共面;(m)膜不渗透液体和/或气体;(n)电路还被配置为基于分析来确定联接至水贮存器的空气输送管的类型;(o)电路还被配置为基于分析来确定联接至空气输送管的患者接口的类型;(p)电路还被配置为基于分析来确定联接至空气输送管的患者接口的类型;(q)中间部件包括被配置为将空气输送管连接到中间部件的出口端和被配置为将水贮存器连接到中间部件的入口端,其中,入口端的中心轴与出口端的中心轴成90
°
或更大的角度;(r)由角度形成的内角是圆的;(s)由该角度形成的内角包括波纹管,该波纹管包括波纹管相对侧之间的跨度,该跨度等于或小于内角半径的两倍;(t)内角由半径为0.2-5mm的曲率形成;(u) 空气输送管被配置为与水贮存器底座电连接;(v)空气输送管被配置为当空气输送管连接到中间部件时,同时形成机械和电连接;(w)水贮存器包括出口管,该出口管提供用于将加湿的可呼吸气体流输送到空气输送管的出口,并且中间部件包括入口密封件,该入口密封件适于与水贮存器的出口管形成密封;(x)中间部件包括管状主体,该管状主体包括出口端,并且空气输送管包括底座连接头,该底座接头包括适于与出口端形成密封以气动地将空气输送管连接到中间部件的径向唇密封件;(y)空气输送管包括底座连接头,该底座连接头包括保持凸块,该保持凸块适于接合在提供给中间部件的相应孔内,以机械地将空气输送管连接到中间部件;和/或(z)底架,其联接至水贮存器底座并且包括底架开口,其中,中间部件中的端口的中心轴与底架开口的第一侧上的底架开口的中心轴对齐,并且声音传感器定位在底架开口的第二侧上距离底架开口小于2mm处。
77.本技术的一种形式的一方面涉及一种呼吸治疗设备,该呼吸治疗设备包括:压力发生器,其被配置为产生用于治疗呼吸障碍的空气流;转换器,其被配置为产生表示空气流的属性的流信号;空气输送管,其被配置为将空气流传至患者接口;可移除地联接至呼吸治疗设备的中间部件,其被配置为将空气输送管连接到压力发生器,并且包括声音端口,该声音端口被配置为促进声音在中间部件的外侧传播;邻近中间部件的端口安放的声音传感器,其被配置为接收从空气输送管和压力发生器传播到中间部件中的声音;控制器,其被配置为:控制压力发生器的运行;在压力发生器运行期间,接收来自传感器的流信号和由声音传感器感测的声音信号;分析所接收的声音信号;至少部分基于分析和流信号修改压力发
生器的运行。
78.在前述方面的示例中:(a)中间部件被配置为气动地将空气输送管连接到呼吸治疗设备,并且机械地将空气输送管连接到呼吸治疗设备;(b)还包括底架,该底架架包括底架开口,其中,中间部件中的端口在底架开口的第一侧上与底架开口对准,并且声音传感器定位在底架开口的第二侧上;(c)还包括围绕端口安放的端口密封件,该端口密封件被配置为在中间部件的外表面上提供周边密封形成件;(d) 周边密封形成件包括脊,该脊被配置为邻接底架的表面;(e)脊在中间部件的外表面上方0.4至0.8mm之间处延伸;(f)当中间部件处于运行位置时,脊被抵靠底架的表面压低,并且被配置为防止中间部件在没有足够的力的情况下拆卸;(g)周边密封形成件包括唇,该唇被配置为邻底架的表面;(h)唇在中间部件的外表面上方0.4至0.8mm 之间处延伸;(i)唇从端口的侧面延伸并在端口的至少一部分上方延伸,当中间部件处于运行位置时,唇在端口上方延伸的部分朝向端口偏斜,并且被配置为防止中间部件在没有足够的力的情况下拆卸;(j) 唇在端口上方从端口的周边以一定角度延伸并朝向端口的中心轴延伸; (k)端口密封件覆盖端口的内表面,并且包括被配置为覆盖端口并将声音从中间部件的内侧传递到中间部件的外侧的膜;(l)膜不渗透液体和/或气体;(m)控制器还被配置为基于分析来确定联接至水贮存器的空气输送管的类型,基于分析来确定联接至空气输送管的患者接口的类型,和/或基于分析来确定联接至空气输送管的患者接口的类型 (n)中间部件包括被配置为将空气输送管连接到中间部件的出口端和被配置为连接到压力发生器的入口端,其中,入口端的中心轴与出口端的中心轴成90
°
或更大的角度;(o)由该角度形成的内角包括波纹管,该波纹管包括波纹管相对侧之间的跨度,该跨度等于或小于内角半径的两倍;内角由半径为0.2-5mm的曲率形成;(p)空气输送管被配置为当空气输送管连接到中间部件时,同时形成机械和电连接;(q) 中间部件包括管状主体,该管状主体包括出口端,并且空气输送管包括底座连接头,该底座连接头包括适于与出口端形成密封以将空气输送管气动连接到中间部件的径向唇密封件;(r)空气输送管包括底座连接头,该底座连接头包括保持凸块,该保持凸块适于接合在提供给中间部件的相应孔内,以机械地将空气输送管连接到中间部件;和/或 (s)还包括底架,该底架包括底架开口,其中,中间部件中的端口的中心轴与在底架开口的第一侧上的底架开口的中心轴对齐,并且声音传感器定位在底架开口的第二侧上距离底架开口小于2mm处。
79.本实用新型的一种形式的一方面涉及一种呼吸治疗设备,该呼吸治疗设备包括:对周围环境呈正压的空气流源;被构造和布置为在使用中相对于源固定就位的底架或壳体;入口气动连接结构,其用于连接到源,以在使用中可密封地接收来自源的正压空气流,容器,其在使用中盛装水体,该容器被配置为导向空气流,使得在使用中空气流接触水体的表面,从而在使用中水蒸汽可以从水体转移到空气流,以增加空气流的绝对湿度,该容器包括至少部分由具有相对高热导率的材料构成的壁、加热元件、温度传感器、控制加热元件的控制器以及接收绝对湿度增加的空气流的出口气动连接结构。底架或壳体被配置为将容器保持在靠近加热元件的位置,使得热能可以从加热元件转移到水体,以增加空气流的绝对湿度。控制器被构造和布置为给加热元件供能以将水加热而不使水沸腾。呼吸治疗设备包括密封布置,使得在使用中,在出口气动连接结构处接收的绝对湿度增加的空气流相对于周围环境具有正压。
80.本技术的另一方面涉及一种cpap系统,该系统包括湿化器、患者接口和将加湿的
空气输送到患者接口的空气输送管。在一示例中,湿化器集成了被构造为产生正压空气流的rpt装置。
81.本技术的另一方面涉及一种湿化器,该加湿器包括水贮存器和水贮存器底座,该水贮存器包括被构造为盛装一定体积的水的空腔,该水贮存器底座被构造和布置为在运行位置接收水贮存器。
82.本技术的另一方面涉及一种用于加湿可呼吸气体流的设备。该设备包括水贮存器,该水贮存器包括:空腔,其被构造为盛装一定体积的水;水贮存器底座,其被构造和布置为在运行位置接收水贮存器;以及空气输送管,其被配置为将已经在储水器中加湿的可呼吸气体流传至患者接口。空气输送管被构造和布置为与水贮存器形成直接气动密封。空气输送管可以包括声音端口和端口密封件,该声音端口被配置为促进声音在空气输送管的外侧传播,该端口密封件围绕声音端口安放,其被配置为在空气输送管的外表面上提供周边密封形成件,并且包括被配置为覆盖端口的声透膜。
83.本技术的另一方面涉及一种用于加湿可呼吸气体流的设备,该设备包括水贮存器,该水贮存器包括:空腔,其被构造为盛装一定体积的水;水贮存器底座,其被构造和布置为在运行位置接收水贮存器;空气输送管,其被配置为将已经在水贮存器中加湿的可呼吸气体流传至患者接口;以及中间部件,可移除地且不可旋转地联接至水贮存器底座。中间部件被配置为气动地将水贮存器连接到空气输送管。中间部件包括由相对刚性的材料制成的一体式构造,该一体式构造包括适于与水贮存器对接的入口端、和适于与空气输送管对接的出口端。空气输送管包括底座连接头,该底座连接头被构造和布置为与水贮存器底座形成卡口式连接,该卡口式连接将空气输送管与水贮存器底座机械和电连接。中间部件包括声音端口和端口密封件,该声音端口被配置为促进声音在空气输送管的外侧传播,该端口密封件围绕声音端口安放,其被配置为在中间部件的外表面上提供周边密封形成件,并且包括被配置为覆盖端口的声透膜。
84.本技术的另一方面涉及一种用于加湿可呼吸气体流的设备。该设备包括水贮存器,该水贮存器包括:空腔,其被构造为盛装一定体积的水;水贮存器底座,其被构造和布置为在运行位置接收水贮存器;空气输送管,其被配置为将已经在储水器中加湿的可呼吸气体流传至患者接口;以及中间部件,可移除地且不可旋转地联接至水贮存器底座。中间部件被配置为气动地将空气输送管连接到水贮存器,并且中间部件被配置为机械地将空气输送管连接到水贮存器底座。中间部件包括声音端口和端口密封件,该声音端口被配置为促进声音在空气输送管的外侧传播,该端口密封件围绕声音端口安放,其被配置为在中间部件的外表面上提供周边密封形成件,并且包括被配置为覆盖端口的声透膜。
85.本技术的一个方面是一种磁性联接器,该磁性联接器柔性地将麦克风联接至空气回路,以改善声学分量识别呼吸治疗系统中的音质和一致性。磁性联接器自对准,以确保麦克风与空气回路的相对水平和垂直位置的一致性。联接器还用作完整的密封的路径,以使声音向周围环境的逃逸最小化。联接器的柔性抑制了装置的一些振动。联接器可以是“波纹管”型联接器,以增加垂直柔性。可选地,为了减少振动从pcba传递到麦克风,麦克风可以安装在pcba的突片上的橡胶足上,该突片部分地被切口沟道包围。
86.根据本技术的一方面,公开了一种联接器,该联接器被配置为连接到传感器,并将声音从rpt装置的空气回路中的端口传至传感器。在本技术的一些方面中,传感器可以联接
至安放在端口上方的电路板;电路板包括沟道切口,该沟道切口至少部分地围绕支撑传感器的电路板的一部分,联接器包括波纹管,和/或联接器给空气回路提供磁性连接。
87.本技术的一种形式的一方面涉及一种用于治疗呼吸病症的设备,该设备包括:压力发生器,其被配置为产生可呼吸气体流;空气输送管,其被配置为将来自压力发生器的可呼吸气流传至患者接口;中间部件,其被配置为气动地将空气输送管连接到压力发生器,该中间部件包括被配置为促进声音在中间部件的外侧传播的端口;传感器,其安放在邻近中间部件的端口处,该传感器被配置为感测通过端口传播的声音;柔性联接器,其被配置为连接到传感器并将声音从端口传至传感器;和控制器。该控制器被配置为:接收由传感器由于在设备运行过程中感测到声音而产生的声音信号,分析所接收的声音信号,以及至少部分基于分析来实现响应。
88.在前述方面的示例中:(a)响应包括以下各项中的至少一项:记录分析的结果,显示分析的结果,转发分析的结果,以及至少部分基于分析来控制压力发生器的运行;(b)该设备包括底架,该底架包括底架开口,其中,中间部件中的端口位于底架开口的第一侧上,并且传感器定位在底架开口的第二侧上;(c)该设备包括位于底架开口的第二侧上的电路板,其中,传感器联接至该电路板;(d)该设备包括电路板,传感器联接至该电路板,其中,联接器包括被配置为直接联接至传感器的出口端和被配置为可移除地联接至中间部件的入口端; (e)出口端的至少一部分联接至电路板;(f)出口端包括被配置为将联接器连接到电路板的橡胶足;(g)电路板包括直通电路板的沟道,该沟道至少部分围绕联接至传感器的电路板的一部分设置,用于隔离从电路板到传感器的振动;(h)该沟道至少部分地围绕电连接到传感器的电路板上的通孔设置;(i)该沟道形成突片,该突片被配置为从电路板的表面在垂直方向上偏斜;(j)入口端包括第一连接元件,该第一连接元件被配置为可移除地联接至第二连接元件,该第二连接元件连接到中间部件;(k)第一连接元件包括磁体和/或第二连接元件包括磁体;(l)第一连接元件或第二连接元件中的一者包括金属环;(m) 第一连接元件具有环形形状和/或第二连接元件具有环形形状;(n)第一连接元件的内径与第二连接元件的内径相同;(o)第二连接元件安放在围绕端口的中间部件的表面下方;(p)还包括膜,该膜被配置为覆盖端口并将声音从中间部件的内侧传递到中间部件的外侧;(q)膜被配置为覆盖联接器的邻近中间部件的一端;(r)膜设置在中间部件的外表面下方(s)联接器包括被配置为联接至传感器的出口端和被配置为联接至中间部件的入口端,并且联接器包括安放在出口端与入口端之间的一个或多个波纹管;(t)一个或多个波纹管适于允许入口端的相对于出口端在水平方向上和/或在垂直方向上的移位;(u)还包括电路板,传感器联接至该电路板,其中,联接器被配置为直接接合传感器,而不直接连接到电路板;和/或(v)空气输送管被配置为将来自压力发生器的可呼吸气体流传至患者接口。
89.本技术的一种形式的一方面涉及一种用于治疗呼吸病症的设备,该设备包括:压力发生器,其被配置为产生可呼吸气体流;空气输送管,其被配置为将来自压力发生器的可呼吸气体流传至患者接口;中间部件,其被配置为气动地将空气输送管连接到压力发生器,该中间部件包括被配置为促进声音在中间部件的外侧传播的端口;电路板,其位于邻近端口处;传感器组件,其安放在电路板与中间部件的端口之间,该传感器组件包括联接至电路板且被配置为感测在中间部件的外侧传播的声音的传感器和被配置为可移除地联接至第二连接元件的第一连接元件,该第二连接元件至少部分地围绕中间部件中的端口安放;和
控制器。该控制器被配置为:接收由传感器由于在设备运行过程中感测到声音而产生的声音信号,分析所接收的声音信号,以及至少部分基于分析来实现响应。
90.在前述方面的示例中:(a)传感器直接联接至电路板;(b)传感器安放在柔性壳体中,该柔性壳体包括多个橡胶足,这些橡胶足被配置为将柔性壳体联接至电路板;(c)当中间部件处于组装位置时,邻近端口的传感器组件的端部被配置为当邻近端口的传感器组件的端部与端口未对准时,在垂直方向和/或水平方向上移位;(d)第一连接元件是磁性环,并且第二连接元件是磁性环或金属环,其被配置为可移除地联接至第一连接元件中的磁性环;(e)电路板包括直通电路板的沟道,并且该沟道至少部分围绕连接到传感器组件的电路板的一部分设置,用于隔离从电路板到传感器的振动;(f)沟道至少部分地围绕在电连接到传感器的电路板上的通孔设置;(g)沟道形成包括通孔的突片,该突片被配置为从电路板的表面在垂直方向上偏斜;(h)第二连接元件安放在围绕端口的中间部件的表面下方;(i)还包括膜,该膜被配置为覆盖在中间部件的内表面处的或在中间部件的外表面处的端口,并且将声音从中间部件的内侧传递到中间部件的外侧;和/或 (j)膜不渗透液体和/或气体。
91.本技术的一种形式的一方面涉及一种用于治疗呼吸病症的设备,该设备包括:压力发生器,其被配置为产生可呼吸气体流,该压力发生器被配置为气动地连接到空气输送管,该空气输送管被配置为将可呼吸气体流从压力发生器传至患者接口,该空气输送管包括被配置为促进声音在空气输送管的外侧传播的端口;传感器,其被配置为当压力发生器连接到空气输送管时,感测通过端口传播的声音;柔性联接器,其被配置为连接到传感器并将声音从端口传至传感器;和控制器。该控制器被配置为:接收由传感器由于在设备运行过程中感测到声音而产生的声音信号,分析所接收的声音信号,以及至少部分基于分析来实现响应。
92.在前述方面的示例中:(a)响应包括以下各项中的至少一项:记录分析的结果,显示分析的结果,转发分析的结果,以及至少部分基于分析来控制压力发生器的运行;(b)该设备包括底架,该底架包括底架开口,其中,端口位于底架开口的第一侧上,并且传感器定位在底架开口的第二侧上;(c)该设备包括位于底架开口的第二侧上的电路板,其中,传感器联接至该电路板;(d)该设备包括电路板,传感器联接至该电路板,其中,联接器包括被配置为直接联接至传感器的出口端和被配置为可移除地联接至空气输送管的入口端;(e)出口端的至少一部分直接联接至电路板;(f)出口端包括被配置为将联接器连接到电路板的多个橡胶足;(g)电路板包括直通电路板的沟道,该沟道至少部分地围绕联接至传感器的电路板的一部分设置,用于隔离从电路板到传感器的振动;(h)沟道至少部分地围绕电连接到传感器的电路板上的通孔设置;(i)沟道形成突片,该突片被配置为从电路板的表面在垂直方向上偏斜;(j)入口端包括第一连接元件,该第一连接元件被配置为可移除地联接至第二连接元件,该第二连接元件连接到空气输送管;(k)第一连接元件包括磁体和/或第二连接元件包括磁体;(l)第一连接元件或第二连接元件中的一者包括金属环;(m) 第一连接元件具有环形形状和/或第二连接元件具有环形形状;(n)第一连接元件的内径与第二连接元件的内径相同;(o)第二连接元件安放在围绕端口的空气输送管的表面下方;(p)该设备还包括膜,该膜被配置为覆盖端口并将声音从输送管的内侧传递到输送管的外侧;(q) 膜被配置为覆盖联接器的邻近输送管的一端;(r)膜设置在输送管的外表面下方;(s)联接器包括被配置为联接至传感器的出口端和被配置为联接至输送管的入口端,并且联接器包括安放
在出口端与入口端之间的一个或多个波纹管;(t)一个或多个波纹管适于允许入口端的相对于出口端在水平方向上和/或在垂直方向上的移位;(u)该设备还包括电路板,传感器联接至该电路板,其中,联接器被配置为直接接合传感器,而不直接连接到电路板;和/或(v)该设备还包括空气输送管。
93.本技术的一种形式的一方面涉及一种用于治疗呼吸病症的设备,该设备包括:压力发生器,其被配置为产生可呼吸气体流;中间部件,其气动地连接到空气输送管,该中间部件包括被配置为促进声音在中间部件的外侧传播的端口;传感器,其从外部附接到中间部件且位于邻近中间部件的端口处,该传感器被配置为感测通过空气输送管传播的声音;以及控制器,其被配置为:接收由传感器由于在设备运行过程中感测到声音而产生的声音信号,分析所接收的声音信号,以及至少部分基于分析来实现响应。
94.在前述方面的示例中:(a)中间部件被配置为气动地将空气输送管连接到压力发生器;(b)响应包括以下各项中的至少一项:记录分析的结果,显示分析的结果,转发分析的结果,以及至少部分基于分析来控制压力发生器的运行;(c)该设备包括底架,该底架包括底架开口,其中,中间部件中的端口位于底架开口的第一侧上,并且传感器定位在底架开口的第二侧上;(d)该设备包括位于底架开口的第二侧上的电路板,其中,传感器联接至该电路板;(e)该设备还包括被配置为将声音从端口传至传感器的柔性联接器;(f)该设备还包括电路板,传感器联接到该电路板,其中,联接器包括被配置为直接接合传感器的出口端和被配置为可移除地接合中间部件的入口端;(g) 联接器的一端可移除地与中间部件相接合(或至少与其接触)和/或另一端与传感器相接合(或至少与其接触);(h)出口端的至少一部分与电路板接触;(i)出口端包括端盖;(j)端盖包括被配置为接触电路板的一个或多个足和/或用于将传感器连接到电路板的一个或多个连接端口;(k)电路板包括直通电路板的沟道,并且该沟道至少部分围绕联接至传感器的电路板的一部分设置,用于隔离从电路板到传感器的振动;(l)沟道至少部分地围绕电连接到传感器的电路板上的通孔设置;(m)沟道形成突片,该突片被配置为在横向方向上向电路板的表面偏斜;(n)入口端包括第一连接元件,该第一连接元件被配置为可移除地联接至第二连接元件,该第二连接元件连接到中间部件;(o) 第一连接元件包括磁体和/或第二连接元件包括磁体;(p)第一连接元件或第二连接元件中的一者包括金属环;(q)第一连接元件具有环形形状和/或第二连接元件具有环形形状;(r)第二连接元件安放在围绕端口的中间部件的表面下方;(s)联接器包括安放在出口端与入口端之间的一个或多个波纹管;(t)一个或多个波纹管适于允许入口端的相对于出口端在水平方向上和/或在垂直方向上的移位;(u)联接器被配置为直接接触传感器,而不直接连接到电路板;(v)该设备还包括被配置为将可呼吸气体流从压力发生器传至患者接口的空气输送管; (w)该设备还包括膜,该膜被配置为覆盖端口并将声音从中间部件的内侧传递到中间部件的外侧;(x)膜设置在中间部件的外表面下方; (y)该设备包括膜和端口密封件中的至少一者,该膜被配置为覆盖端口并将声音从中间部件的内侧传递到中间部件的外侧,并且该端口密封件安放成以便提供端口与底架开口之间的密封接合;(z)该设备还包括水贮存器,该水贮存器包括空腔,该空腔被构造为盛装一定体积的水并接收可呼吸气体流,使得可呼吸气体流在传至患者接口之前被加湿;以及还包括水贮存器底座,其被构造和布置为在运行位置接收水贮存器,其中,中间部件可移除地联接至水贮存器底座,以便接收加湿的可呼吸气体流并将其传至空气输送管;(aa)中间部件是大致管状形状,并且
水贮存器底座包括用于接收中间部件的大致管状开口,中间部件和大致管状开口被配置为用于中间部件大致无摩擦地插入开口;(ab)中间部件和大致管状开口中的至少一者包括至少一个接合形成件,该接合形成件布置成使得在中间部件插入开口的过程中,接合形成件中的至少一个的接合使中间部件进入其运行配置,在该运行配置中,实现以下各项中的至少一项:端口密封件与底架开口的密封接合;以及由至少一个接合形成件实现的支撑接合,该支撑接合被配置为在没有明显外力的情况下阻止中间部件从其运行配置移开;(ac) 接合形成件中的至少一个的接合发生在插入路径的往后的点(laterpoint)处;(ad)一个或多个接合形成件包括引起中间部件的至少一部分向上运动的提升特征;(ae)提升特征设置在管状开口的底部上,并且在中间部件插入管状开口预定距离之后,向上推动中间部件以减小管状开口的顶部与中间部件之间的间距;(af)中间部件和大致管状开口中的至少一个的每一个包括多个接合形成件,每个接合形成件被布置为在中间部件插入开口的过程中近似同时接合;(ag)该设备还包括被配置为包围端口的端口密封件,其中,端口密封件包括周边密封形成件,该周边密封形成件包括脊,该脊被配置为当中间部件联接至水贮存器底座时,邻接底架的围绕底架开口的表面;(ah)该设备还包括被配置为包围端口的端口密封件,其中,端口密封件包括周边密封形成件,该周边密封形成件包括唇,该唇被配置为当中间部件联接至湿化器时,邻接底架的围绕底架开口的表面;(ai)其中,唇在端口上方从端口的周边以一定角度延伸并朝向端口的中心轴延伸;(aj) 其中,端口密封件覆盖端口的内表面并包括膜;(ak)其中,膜至少与中间部件的内表面或外表面共面;(al)其中,膜不渗透液体和/或气体;(am)其中,控制器被配置为基于分析来确定空气输送管或患者接口的特性;(an)其中,控制器还被配置为基于分析来确定空气输送管的类型或大小、或者联接至空气输送管的患者接口的类型或大小;(ao)其中,中间部件包括被配置为将空气输送管连接到中间部件的出口端和被配置为将水贮存器连接到中间部件的入口端,其中,入口端与出口端之间的空气路径是非线性的并且包括至少一个圈,其中,至少最靠近端口的圈是弯曲的;(ap)入口端的中心轴基本上横向于出口端的中心轴,从而限定了相应的横向空气路径、外角和内角,每个角包括圆形内表面;(aq)入口端之间的横向空气路径与入口端相邻交叉,入口端包括适于与水贮存器对接的入口密封件;(ar)内角包括波纹管,该波纹管包括波纹管的相对侧之间的跨度,该跨度等于或小于内角的半径的两倍,和/或内角的内表面包括半径为0.2-5mm的曲率;(as)中间部件被配置为气动地将空气输送管连接到水贮存器,并且机械地将空气输送管连接到水贮存器底座;(at)空气输送管被配置为当空气输送管连接到中间部件时,同时形成机械和电连接;(au) 该设备还包括转换器,该转换器被配置为产生表示空气流的属性的流信号,其中,控制器被配置为:控制压力发生器的运行;以及在压力发生器的运行过程中:接收来自传感器的流信号和由传感器感测的声音信号;分析所接收的声音信号;以及至少部分基于分析和流信号来修改压力发生器的运行;(av)还包括:包括底架开口的底架,该底架开口穿过底架延伸,其中,中间部件中的端口位于邻近底架开口的第一端处;以及还包括位于邻近底架开口的第二端处的电路板,其中,传感器定点在电路板上并与底架开口对准;(aw)底架开口的第二端包括比第一端的开口更大的开口;(ax)底架开口的第二端由从底架的面向电路板的表面延伸的侧壁提供;(ay)其中,传感器至少部分地定位在底架开口的内侧;(az)还包括安放在底架与电路板之间并邻近底架开口的第二端的密封件;(aaa)密封件包括周边密封形成件,该周边密封形成件包括唇或脊,该唇或脊被配置为
邻接电路板的邻近传感器的表面;该周边密封形成件可以从密封件的面向电路板的表面延伸并包围底架开口的第二端;(aab)还包括在设备的底架中的大致管状开口,用于接收大致管状形状的中间部件,并且中间部件包括:适于插入开口的入口端、适于与空气输送管对接的出口端、布置在入口端与出口端之间的法兰、以及设置在邻近法兰的面向入口端的一侧处的一个或多个柔性缓冲器(例如,用于在插入过程中使与管状开口的壁的邻接变柔软,并用于吸收使用中的振动);(aac)中间部件还包括在中间部件的与出口端相对的一端处的倒钩突片(barbed tab),其中,倒钩突片被构造为提供与底架的锁定构件的卡扣配合(snap-fit) 连接,并且在卡扣配合连接过程中,一个或多个缓冲器被法兰抵靠底架的一部分压低,并且在没有明显外力的情况下,迫使倒钩突片抵靠锁定构件以阻止倒钩突片从锁定构件脱离;(aad)在中间部件初始插入大致管状开口的过程中,在中间部件与大致管状开口之间提供了最小的阻力,并且在插入的后期,在中间部件的一个或多个接合特征接合底架的大致管状开口中的相应接合特征的位置处,阻力增加,中间部件的相应接合特征与底架开口之间的接合引导中间部件进入其与开口的运行接合配置中;(aae)还包括端口密封件,该端口密封件安放成以便在运行位置提供端口与底架开口之间的密封接合,其中,在中间部件插入大致管状开口的后期,中间部件的相应接合特征与底架开口之间的相互作用将中间部件定位,以确保端口密封件与底架的围绕底架开口的表面之间的密封接合(例如,当中间部件处于其运行位置时);(aaf)还包括水贮存器,该水贮存器包括空腔,该空腔被构造为盛装一定体积的水并接收可呼吸气体流,使得可呼吸气体流在传至患者接口之前被加湿;以及还包括水贮存器底座,其被构造和布置为在运行位置接收水贮存器,其中,中间部件的入口端可移除地联接至水贮存器底座,以接收加湿的可呼吸气体流并将其传至空气输送管,入口端包括入口密封件,并且在运行位置,入口密封件在端口与底架开口之间提供密封接合,并且入口密封件在入口端与水贮存器底座之间提供密封接合;(aag)中间部件还包括在中间部件的外表面上的导向挡边(guide rib)和/或在中间部件的外表面上的导向轨,导向挡边和导向轨被构造和布置为通过与延伸到底架的大致管状开口中的相应导向槽相接合,来辅助中间部件对准和插入底架中的大致管状开口;(aah) 导向挡边设置在中间部件的前侧上和上侧上,导向轨设置在中间部件的下侧上;(aai)底架包括大致管状开口,该大致管状开口用于接收大致管状形状的中间部件,并且中间部件包括适于插入开口的入口端和适于与空气输送管对接的出口端,其中,在中间部件插入开口的过程中,在端口密封件与靠近底架开口的底架之间提供了间距,并且在中间部件插入开口的过程中,在端口的边缘经过中心轴或底架开口的边缘之后,端口密封件开始接合底架;(aaj)在端口密封件开始接合底架之后,中间部件进一步插入预定距离,以使中间部件进入其运行配置;(aak)还包括包覆成型在传感器上的柔性壳体,该壳体从电路板移位,至少部分地经过底架开口;和/或(aal)压力发生器、中间部件、控制器和传感器通常由设备的壳体容纳。
95.本技术的一种形式的一方面涉及一种用于治疗呼吸病症的设备,该设备包括:压力发生器,其被配置为产生可呼吸气体流;空气输送管,其被配置为连接到压力发生器并且包括被配置为促进声音在空气输送管的外侧传播的端口;传感器,其安放在空气输送管的外侧且邻近空气输送管的端口,该传感器被配置为感测通过端口传播的声音;以及控制器,其被配置为:接收由传感器由于在设备运行过程中感测到声音而产生的声音信号,分析所接收的声音信号,以及至少部分基于分析来实现响应。
96.在前述方面的示例中:(a)响应包括以下各项中的至少一项:记录分析的结果,显示分析的结果,转发分析的结果,以及至少部分基于分析来控制压力发生器的运行;(b)该设备包括底架,该底架包括底架开口,其中,端口位于底架开口的第一侧上,并且传感器定位在底架开口的第二侧上;(c)该设备包括位于底架开口的第二侧上的电路板,其中,传感器联接至该电路板;(d)该设备还包括被配置为将声音从端口传至传感器的柔性联接器;(e)该设备还包括电路板,传感器联接到该电路板,其中,联接器包括被配置为直接接合传感器的出口端和被配置为可移除地接合空气输送管的入口端;(f)联接器的一端可移除地联接至空气输送管和/或另一端联接至传感器;(f)出口端的至少一部分与电路板接触;(g)出口端包括端盖;(g)端盖包括被配置为接触电路板的一个或多个足和/或用于将传感器连接到电路板的一个或多个连接端口;(h)电路板包括直通电路板的沟道,并且该沟道至少部分围绕联接至传感器的电路板的一部分设置,用于隔离从电路板到传感器的振动;(i)沟道至少部分地围绕电连接到传感器的电路板上的通孔设置;(j)沟道形成突片,该突片被配置为在横向方向上向电路板的表面偏斜;(k)入口端包括第一连接元件,该第一连接元件被配置为可移除地联接至第二连接元件,该第二连接元件连接到空气输送管;(l)第一连接元件包括磁体和/或第二连接元件包括磁体;(m)第一连接元件或第二连接元件中的一者包括金属环;(n) 第一连接元件具有环形形状和/或第二连接元件具有环形形状;(o)第二连接元件安放在围绕端口的空气输送管的表面下方;(p)联接器包括安放在出口端与入口端之间的一个或多个波纹管;(q)一个或多个波纹管适于允许入口端的相对于出口端在水平方向上和/或在垂直方向上的移位;(r)联接器被配置为直接接触传感器,而不直接连接到电路板;(s)该设备还包括被配置为将可呼吸气体流从压力发生器传至患者接口的空气输送管;(t)该设备还包括膜,该膜被配置为覆盖端口并将声音从中间部件的内侧传递到中间部件的外侧;(u)膜设置在空气输送管的外表面下方;(v)该设备包括膜和端口密封件中的至少一者,该膜被配置为覆盖端口并将声音从中间部件的内侧传递到中间部件的外侧,并且该端口密封件安放成以便提供端口与底架开口之间的密封接合;(w)该设备还包括水贮存器,该水贮存器包括空腔,该空腔被构造为盛装一定体积的水并接收可呼吸气体流,使得可呼吸气体流在传至患者接口之前被加湿;以及还包括水贮存器底座,其被构造和布置为在运行位置接收水贮存器,其中,空气输送管可移除地联接至水贮存器底座,以便接收加湿的可呼吸气体流并将其传至空气输送管;(y)空气输送管包括至少一个接合形成件,该接合形成件布置为使得在空气输送管插入开口过程中,在插入路径的端部的近侧,接合形成件中的至少一个的接合使空气输送管进入其运行配置,在该运行配置中,端口密封件将端口和底架开口两者密封,并且其中,端口密封件与端口和底架开口的密封接合,以及由至少一个接合形成件实现的支撑接合种的至少一种被配置为在没有明显外力的情况下,阻止空气输送管从其运行配置移开;(z)一个或多个接合形成件包括提升特征;(aa)该设备还包括被配置为包围端口的端口密封件,其中,端口密封件包括周边密封形成件,该周边密封形成件包括脊,该脊被配置为当空气输送管联接至水贮存器底座时,邻接底架的围绕底架开口的表面;(ab)该设备还包括被配置为包围端口的端口密封件,其中,端口密封件包括周边密封形成件,该周边密封形成件包括唇,该唇被配置为当空气输送管联接至湿化器时,邻接底架的围绕底架开口的表面;(ac)其中,唇在端口上方从端口的周边以一定角度延伸并朝向端口的中心轴延伸;(ad)其中,端口密封件覆盖端口的内表面并包括膜;(ae)其中,膜至少与空气
输送管的内表面或外表面共面;(af) 其中,膜不渗透液体和/或气体;(ag)其中,控制器被配置为基于分析来确定空气输送管或患者接口的特性;(ah)其中,控制器还被配置为基于分析来确定空气输送管的类型或大小、或者联接至空气输送管的患者接口的类型或大小;和/或(ai)该设备还包括转换器,该转换器被配置为产生表示空气流的属性的流信号,其中,控制器被配置为:控制压力发生器的运行;以及在压力发生器的运行过程中:接收来自转换器的流信号和由传感器感测的声音信号;分析所接收的声音信号;以及至少部分基于分析和流信号来修改压力发生器的运行;
97.可以实施所描述的方法、系统、装置和设备以改善处理器的功能性,该处理器诸如是专用计算机、呼吸监测器和/或呼吸治疗设备的处理器。此外,所描述的方法、系统、装置和设备可以在包括例如睡眠障碍性呼吸的呼吸病症的自动管理、监测和/或治疗的技术领域中提供改进。
98.当然,这些方面的一部分可以形成本技术的子方面。子方面和/或方面中的各个方面可以各种方式进行组合,并且还构成本技术的其他方面或子方面。
99.考虑到以下详细描述、摘要、附图中包含的信息,本技术的其他特征将变得显而易见。
4附图说明
100.本技术在附图的各图中以举例而非限制的方式例示,附图中的相似参考数字指代相似元件,包括:
101.4.1治疗系统
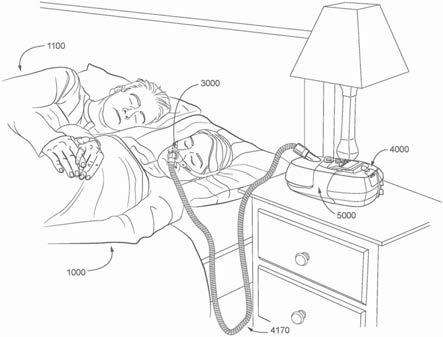
102.图1a示出了一种系统,其包括以鼻枕的方式佩戴患者接口3000 的患者1000从rpt装置4000接收正压下的空气供给。来自rpt装置 4000的空气在湿化器5000中加湿,并沿着空气回路4170传至患者1000。还示出了床伴1100。患者以仰卧睡姿睡眠。
103.图1b示出了一种系统,其包括以鼻罩的方式佩戴患者接口3000 的患者1000从rpt装置4000接收正压下的空气供给。来自rpt装置的空气在湿化器5000中加湿,并沿着空气回路4170传至患者1000。
104.图1c示出了一种系统,其包括以全面罩的方式佩戴患者接口3000 的患者1000从rpt装置4000接收正压下的空气供给。来自rpt装置的空气在湿化器5000中加湿,并沿着空气回路4170传至患者1000。患者以侧卧睡姿睡眠。
105.4.2呼吸系统和面部解剖结构
106.图2a示出了包括鼻腔和口腔、喉、声带、食道、气管、支气管、肺、肺泡囊、心脏和膈膜的人类呼吸系统的概略图。
107.图2b示出了包括鼻腔、鼻骨、鼻外软骨、鼻翼大软骨、鼻孔、上唇、下唇、喉、硬腭、软腭、口咽、舌、会厌、声带、食道和气管的人类上气道的视图。
108.4.3患者接口
109.图3a示出了根据本技术的一种形式的呈鼻罩形式的患者接口。
110.图3b示出了在一点处通过结构的横截面的示意图。指示了在该点处的向外法线。在该点处的曲率具有正号,并且当与图3c所示的曲率幅度相比时具有相对大的幅度。
111.图3c示出了在一点处通过结构的横截面的示意图。指示了在该点处的向外法线。
在该点处的曲率具有正号,并且当与图3b所示的曲率幅度相比时具有相对小的幅度。
112.图3d示出了在一点处通过结构的横截面的示意图。指示了在该点处的向外法线。在该点处的曲率具有零值。
113.图3e示出了在一点处通过结构的横截面的示意图。指示了在该点处的向外法线。在该点处的曲率具有负号,并且当与图3f所示的曲率幅度相比时具有相对小的幅度。
114.图3f示出了在一点处通过结构的横截面的示意图。指示了在该点处的向外法线。在该点处的曲率具有负号,并且当与图3e所示的曲率幅度相比时具有相对大的幅度。
115.图3g示出了在表面上具有一维孔的结构的表面。图示的平面曲线形成了一维孔的边界。
116.图3h示出了穿过图3g的结构的截面。图示的表面在图3g的结构中限定二维孔。
117.图3i示出了图3g的结构的透视图,包括二维孔和一维孔。还示出了在图3g的结构中界定二维孔的表面。
118.4.4呼吸波形
119.图4示出了睡眠时人的模型典型呼吸波形。
120.4.5rpt装置和湿化器
121.图5a示出了根据本技术的一种形式的rpt装置4000的分解透视图。
122.图5b示出了根据本技术的一种形式的rpt装置4000的透视图,其包括带消音器4124的出口盖。
123.图5c示出了根据本技术的一种形式的rpt装置4000的透视图,其具有包括水贮存器5110的集成湿化器5000。
124.图5d示出了根据本技术的一种形式的rpt装置的气动路径的示意图。参考鼓风机和患者接口来指示上游和下游的方向。该鼓风机被定义为该患者接口的上游并且该患者接口被定义为该鼓风机的下游,而不管在任何特定时刻的实际流动方向。位于鼓风机和患者接口之间的气动路径内的物品在鼓风机的下游和患者接口的上游。
125.图5e示出了根据本技术的一种形式的rpt装置的电气部件的示意图。
126.图5f示出了根据本技术的一种形式的在rpt装置中实施的算法的示意图。
127.图5g示出了根据本技术的一种形式的湿化器的示意图。
128.图6a是根据本技术的一示例的包括水贮存器的集成rpt装置及湿化器的透视图。
129.图6b是图6a的集成rpt装置及湿化器的透视图,其中水贮存器从贮存器底座移除。
130.图7是根据本技术的一示例的气动块的透视图。
131.图8是根据本技术的一示例的圆形金属板的水贮存器的分解图。
132.图9是示出了根据本技术的一示例的贮存器底座、中间部件和空气输送管的透视图,空气输送管定向成用于与中间部件接合,并且锁定及接触组件设置于贮存器底座。
133.图10是示出了图9的贮存器底座和空气输送管的透视图,空气输送管与设置于处于解锁接合位置的贮存器底座的锁定及接触组件相接合。
134.图11是示出了图9的贮存器底座和空气输送管的透视图,空气输送管与设置于处于锁定位置的贮存器底座的锁定及接触组件相接合。
135.图12是示出了图9的贮存器底座、中间部件和空气输送管的透视图。
136.图13是示出了图9的贮存器底座、中间部件、空气输送管和贮存器底座的锁定及接
触组件的分解图。
137.图14是示出了图9的贮存器底座、中间部件、空气输送管和贮存器底座的锁定及接触组件的另一分解图。
138.图15是示出了图9的贮存器底座和其锁定及接触组件、中间部件和空气输送管的透视图。
139.图16是图9的贮存器底座的放大俯视透视图,其包括底座出口和锁定及接触组件。
140.图17是示出了设置于图9的贮存器底座的锁定及接触组件而没有中间部件的放大透视图。
141.图18是示出了设置于图9的贮存器底座的锁定及接触组件而没有中间部件的另一放大透视图。
142.图19是示出了根据本技术的一示例的中间部件的后透视图。
143.图20是图19的中间部件的前视图。
144.图21是图19的中间部件的俯视图。
145.图22是图19的中间部件的分解图。
146.图23是示出了根据本技术的一示例的贮存器底座、中间部件和空气输送管的透视图,空气输送管定向成用于与中间部件接合,并且接触组件设置于贮存器底座。
147.图24是示出了图23的贮存器底座、中间部件和空气输送管的透视图,空气输送管与中间部件和设置于处于锁定位置的贮存器底座的接触组件相接合。
148.图25是示出了图23的贮存器底座和已接合的中间部件的透视图。
149.图26是示出了图23的贮存器底座、中间部件和空气输送管的分解图。
150.图27是示出了图23的贮存器底座的底座出口的透视图,其中中间部件被移除。
151.图28a是示出了中间部件和设置于图23的贮存器底座的接触组件的透视图。
152.图28b是沿着图25所指示的线截取的截面图,示出了根据本技术的一示例的中间部件到贮存器底座的连接。
153.图28c是根据本技术的一示例的中间部件(没有下突片9795)的沿着图26所指示的线截取的截面图。
154.图28d是沿着图25所指示的线截取的另一截面图,示出了根据本技术的一示例的中间部件到贮存器底座的连接。
155.图28e是沿着图28d所指示的线截取的另一截面图,示出了根据本技术的一示例的中间部件到贮存器底座的连接。
156.图28f是沿着图28d所指示的线截取的另一截面图,示出了根据本技术的一示例的中间部件到贮存器底座的连接和夹紧臂到底架的连接。
157.图28g是沿着图28f所指示的线截取的另一截面图,示出了根据本技术的一示例的夹紧臂到底架的连接。
158.图29是根据本技术的一示例的中间部件的俯视透视图。
159.图30是图29的中间部件的仰视透视图。
160.图31是图29的中间部件的前视图。
161.图32是图29的中间部件的俯视平面图。
162.图33是图29的中间部件的分解图。
163.图34a是根据本技术的一示例的包括声音端口上的脊密封形成件的中间部件的透视图。
164.图34b是根据本技术的示例的中间部件在当包括相对于相应底架声音开口对准的图34a的脊密封形成件时,沿着图23所指示的线aa 截取的局部截面图。
165.图34c是根据本技术的一示例的脊密封形成件的沿着图34a所指示的线截取的侧截面图。
166.图34d是根据本技术的一示例的压靠底架的图34c的脊密封形成件的侧截面图。
167.图35a是根据本技术的一示例的包括声音端口上的唇密封形成件的中间部件的透视图。
168.图35b是根据本技术的一示例的中间部件在当包括相对于相应底架声音开口对准的图35a的唇密封形成件时,沿着图23所指示的线 aa截取的局部截面图。
169.图35c是根据本技术的一示例的唇密封形成件的沿着图35a所指示的线截取的侧截面图。
170.图35d是根据本技术的一示例的压靠底架的图35c的唇密封形成件的侧截面图。
171.图36a示出了根据本技术的一示例的中间部件在端口密封件接合底架之前插入接收底架开口,沿图23所指示的线aa截取的侧截面图。
172.图36b示出了根据本技术的一示例的图36a的中间部件在进一步插入接收底架开口使得端口密封件开始接合底架时的侧截面图。
173.图36c示出了根据本技术的一示例的图36a的中间部件在完全插入接收底架开口,同时端口密封件已接合底架时的侧截面图。
174.图36d示出了根据本技术的一示例的图29的中间部件在完全插入接收底架开口,同时端口密封件已接合底架时的侧截面图。
175.图37图示了根据本技术的用于检测声音信号的系统的示例部件。
176.图38a图示了根据本技术的一示例的联接在电路板与中间部件之间的联接器的透视图。
177.图38b图示了根据本技术的一示例的图38a所示的联接在电路板与中间部件之间的联接器的分解图。
178.图38c图示了根据本技术的一示例的图38a所示的联接到中间部件的联接器。
179.图38d图示了根据本技术的一示例的联接到中间部件的第二连接元件。
180.图39a图示了根据本技术的一示例的在电路板与中间部件之间的联接器的截面图。
181.图39b图示了根据本技术的一示例的图38a所示的在电路板与中间部件之间的联接器的分解图。
182.图39c图示了根据本技术的一示例的电路板、传感器、联接器和第一连接元件的另一分解图。
183.图39d图示了图39c所示的电路板、传感器、联接器和第一连接元件的侧视图。
184.图40a图示了在传感器与中间部件之间不包括联接器的情况下可能发生的声音逃逸。
185.图40b图示了根据本技术的一示例的在传感器与中间部件之间包括联接器的系统
中可能发生的声音逃逸。
186.图41a图示了根据本技术的一示例的用于将传感器联接至电路板的橡胶接口。
187.图41b图示了根据本技术的一示例的图41a所示的用于将传感器联接至电路板的橡胶接口的另一视图。
188.图41c图示了根据本技术的一示例的组件,其包括电路板、中间部件和用于将传感器可移除地联接至中间部件的橡胶接口。
189.图42a图示了根据本技术的一示例的包括切口沟道的电路板。
190.图42b图示了根据本技术的一示例的组件的分解图,其包括图 42a所示的在电路板、传感器、连接元件和中间部件。
191.图42c图示了根据本技术的一示例的图42b所示的已组装的电路板、传感器、连接元件和中间部件。
192.图43示出了根据本技术的一示例的安放在柔性壳体中的传感器。
193.图44图示了根据本技术的用于声学检测与分析的示例方法。
5具体实施例
194.在更进一步详细描述本技术之前,应当理解的是本技术并不限于本文所描述的特定示例,本文描述的特定示例可改变。还应当理解的是本公开内容中使用的术语仅是为了描述本文所描述的特定示例的目的,并不意图进行限制。
195.提供与可共有一个或多个共同特点和/或特征的各种示例有关的以下描述。应当理解的是任何一个示例的一个或更多个特征可以与另一个示例或其他示例的一个或多个特征组合。另外,在示例的任一项中,任何单个特征或特征的组合可以组成另外的示例。
196.5.1治疗
197.在一种形式中,本技术包括用于治疗呼吸障碍的方法,该方法包括向患者1000的气道入口施加正压的步骤。
198.在本技术的某些实例中,经由一个或两个鼻孔向患者的鼻道提供正压下的空气供给。
199.在本技术的某些实例中,限定、限制或阻止口呼吸。
200.5.2治疗系统
201.在一种形式中,本技术包括用于治疗呼吸障碍的设备或装置。该设备或装置可包括rpt装置4000,其用于经由空气回路4170至患者接口3000向患者1000供应加压空气,例如,见图1a至1c。
202.5.3患者接口
203.图3a示出了根据本技术的一方面的无创患者接口3000,包括以下功能方面:密封形成结构3100、充气室3200、定位和稳定结构3300、通气口3400、用于连接到空气回路4170的一种形式的连接端口3600 以及前额支架3700。在一些形式中,可通过一个或多个物理部件来提供功能方面。在一些形式中,一个物理部件可提供一个或多个功能方面。在使用中,密封形成结构3100被布置为围绕患者气道的入口,以促进向气道供应正压空气。
204.如果患者接口不能舒适地向气道输送最小水平的正压,则患者接口可能不适于呼吸压力治疗。
205.根据本技术的一种形式的患者接口3000被构造和布置为能以相对于周围环境至少6cmh2o的正压供应空气。
206.根据本技术的一种形式的患者接口3000被构造和布置为能以相对于周围环境至少10cmh2o的正压供应空气。
207.根据本技术的一种形式的患者接口3000被构造和布置为能以相对于周围环境至少20cmh2o的正压供应空气。
208.5.4 rpt装置
209.在图5a中示出了根据本技术的一个方面的rpt装置4000的分解图。rpt装置4000可以包括机械、气动和/或电气部件,且被配置为执行一个或多个算法。rpt装置4000可以被配置为产生用于输送到患者气道的空气流,诸如用于治疗本文件其他部分描述的一种或多种呼吸病症。
210.在一种形式中,rpt装置4000被构造和布置为以-20l/min至+150 l/min的范围输送空气流,同时保持至少6cmh2o、或至少10cmh2o、或至少20cmh2o的正压。
211.rpt装置4000可以包括具有一个或多个面板的外壳,面板诸如主面板(例如,外壳4010)、前面板4012和侧面板4014。rpt装置4000 还可以包括带消音器4124的出口盖,如图5a和图5b所示。带消音器 4124的出口盖可以是可移除的,并且可以用水贮存器5110代替(见图 5c)。在此类形式中,rpt装置4000可以被认为包括集成湿化器5000。因此,根据水贮存器5110或带消音器4124的出口盖是否分别被附接, rpt装置4000可以在加湿或不加湿的情况下使用。消音器4124的结构和操作类似于专利wo 2015/089582中描述的端盖消音器的结构和操作,该专利通过引用整体并入本文。优选地,rpt装置4000包括底架 4016,该底架支撑rpt装置4000的一个或多个内部部件。在一种形式中,rpt装置4000包括压力发生器4140,该压力发生器4140可以容纳在联接至底架4016的气动块4020中。
212.在pct公开号wo 2015/089582中描述了示例性rpt装置的另外的示例和细节。
213.rpt装置4000的气动路径(例如,如图5d所示)可以包括入口空气过滤器4112、入口消音器4122、能够供应正压下的空气的压力发生器4140(优选地为鼓风机4142)和出口消音器4124(或者如果需要加湿,则为水贮存器5110)。气动路径中可以包括一个或多个传感器或转换器4270,诸如压力传感器和流传感器。气动路径还可以包括防溢回阀4160,以防止水从湿化器5000溢回rpt装置4000的电气部件。
214.如图5e所示,rpt装置4000可以具有电源4210、一个或多个输入装置4220、中央控制器4230、治疗装置控制器4240、一个或多个保护电路4250、存储器4260、传感器/转换器4270、数据通信接口4280 和一个或多个输出装置4290。电气部件4200可以安装在单个印刷电路板组件(pcba)4202上(例如,见图5a)。在一种替代形式中,rpt 装置4000可以包括超过一个pcba 4202。
215.5.4.1 rpt装置机械和气动部件
216.rpt装置可以在整体单元中包括一个或多个以下部件。在一种替代形式中,一个或多个以下部件可以定位为各自分离的单元。
217.5.4.1.1空气过滤器
218.根据本技术的一种形式的rpt装置可以包括一个空气过滤器4110,或多个空气过滤器4110。
219.在一种形式中,入口空气过滤器4112位于压力发生器4140上游的气动路径的起点处。
220.在一种形式中,出口空气过滤器4114,例如抗菌过滤器位于气动块4020的出口与患者接口3000之间。
221.5.4.1.2消音器
222.根据本技术的一种形式的rpt装置可以包括一个消音器4120,或多个消音器4120。
223.在本技术的一种形式中,入口消音器4122位于压力发生器4140 上游的气动路径中。
224.在本技术的一种形式中,出口消音器4124位于压力发生器4140 与患者接口3000之间的气动路径中。
225.5.4.1.3压力发生器
226.在本技术的一种形式中,用于产生正压下的空气流或空气供给的压力发生器4140为可控鼓风机4142。例如,鼓风机4142可以包括无刷dc电动机4144,其具有一个或多个叶轮。这些叶轮可以位于蜗壳中。鼓风机可以例如以高达约120升/分钟的速率,并以约4cmh2o至约20cmh2o范围内的正压或高达约30cmh2o的其他形式输送空气供应。鼓风机可以如以下专利或专利申请中任何一个所述,这些专利或专利申请通过引用的方式整体并入本文:美国专利号7,866,944;美国专利号8,638,014;美国专利号8,636,479;和pct专利申请号wo 2013/020167。
227.压力发生器4140在治疗装置控制器4240的控制下。
228.在其他形式中,压力发生器4140可以是活塞驱动泵、连接到高压源的压力调节器(例如,压缩空气贮存器)或波纹管。
229.5.4.1.4转换器
230.转换器可以在rpt装置内部,或rpt装置外部。外部转换器可以位于例如空气回路例如患者接口上或构成其一部分。外部转换器可以是非接触传感器的形式,诸如发送或转移数据至rpt装置的多普勒雷达运动传感器。
231.在本技术的一种形式中,一个或多个转换器4270位于压力发生器4140的上游和/或下游。一个或多个转换器4270可以被构造和布置为生成表示在rpt装置中的声音或在气动路径中在该点处的诸如流量、压力或温度等属性的空气流的信号。
232.在本技术的一种形式中,一个或多个转换器4270可以位于患者接口3000的近侧。
233.在本技术的一种形式中,一个或多个转换器4270可以位于rpt 装置中。
234.在一种形式中,可以诸如通过低通滤波、高通滤波或带通滤波对来自转换器4270的信号进行滤波。
235.5.4.1.4.1流量传感器
236.根据本技术的流量传感器4274可以基于压差转换器,例如来自 sensirion的sdp600系列压差转换器。
237.在一种形式中,来自流量传感器4274的表示流量的信号被中央控制器4230接收。
238.5.4.1.4.2压力传感器
239.根据本技术的压力传感器4272位于与气动路径流体连通的路径中。合适的压力传感器的实例是来自honeywell asdx系列的转换器。替代性合适的压力传感器是来自
general electric的npa系列的转换器。
240.在一种形式中,来自压力传感器4272的信号被中央控制器4230 接收。
241.5.4.1.4.3电动机转速转换器
242.在本技术的一种形式中,电动机转速转换器4276用于确定电动机 4144和/或鼓风机4142的转动速度。可以将来自电动机转速转换器4276 的电动机转速信号提供给治疗装置控制器4240。电动机转速转换器 4276可以是例如速度传感器,诸如霍尔效应传感器。
243.5.4.1.4.4环境光传感器4278
244.由于rpt装置4000经常用在卧室环境中,例如在患者1000即将入睡或正在睡觉时使用,因此可能重要的是要确保rpt装置4000的任何发光特征不是过度明亮的。
245.在本技术的一种形式中,环境光传感器4278用于确定围绕rpt 装置4000的环境区域的光水平。来自环境光传感器4278的环境光信号可以作为输入提供给中央控制器4230,例如用于调节显示器的亮度或任何其他发光特征,诸如输入装置4220的背光或任何通知灯。
246.显示器4294可以被配置为在多种预定亮度设置中的一种下运行。可以根据环境光传感器4278的信号输出来选择亮度设置。
247.5.4.1.4.5声音传感器
248.在本技术的一种形式中,转换器4270可以包括声音传感器,该声音传感器可以为麦克风,其被配置为产生表示rpt装置中的声音的信号。声音传感器可以被配置为将患者可听见范围内的声音和/或不可听见范围内的声音转换为电信号。声音传感器可以产生模拟信号或数字信号。
249.5.4.1.5防溢回阀
250.在本技术的一种形式中,防溢回阀4160位于湿化器5000与气动块4020之间。防溢回阀被构造和布置为降低水从湿化器5000向上游流动到例如电动机4144的风险。
251.5.4.2 rpt装置电气部件
252.5.4.2.1电源
253.电源4210可以位于rpt装置4000的外壳4010的内部或外部。
254.在本技术的一种形式中,电源4210仅向rpt装置4000提供电力。在本实用新型技术的另一种形式中,电源4210向rpt装置4000和湿化器5000两者提供电力。
255.5.4.2.2输入装置
256.在本技术的一种形式中,rpt装置4000包括形式为按钮、开关或拨盘的一个或多个输入装置4220,以允许人与装置进行交互。按钮、开关或拨盘可以是经由触摸屏访问的物理装置或者软件装置。在一种形式中,按钮、开关或拨盘可以物理连接到外壳4010,或者在另一种形式中,可以与接收器无线通信,该接收器与中央控制器4230电连接。
257.在一种形式中,输入装置4220可以被构造和布置为允许人选择值和/或菜单选项。
258.5.4.2.3中央控制器
259.在本技术的一种形式中,中央控制器4230为一个或多个适于控制rpt装置4000的处理器。
260.合适的处理器可包括x86因特尔处理器、基于来自arm holdings 的处理器的处理器,诸如来自st microelectronic的stm32系列微控
制器。在本技术的某些替代性形式中,32位risc cpu诸如来自st microelectronics的str9 系列微控制器,或16位元risc cpu诸如来自由texas instruments制造的msp430系列微控制器的处理器可以同样适用。
261.在本技术的一种形式中,中央控制器4230为专用电子回路。
262.在一种形式中,中央控制器4230为专用集成电路。在另一种形式中,中央控制器4230包括分立电子部件。
263.中央控制器4230可以被配置为从一个或多个转换器4270、一个或多个输入装置4220和湿化器5000接收输入信号。
264.中央控制器4230可以被配置为将输入信号提供给输出装置4290、治疗装置控制器4240、数据通信接口4280和湿化器5000中的一者或多者。
265.在本技术的一些形式中,中央控制器4230被配置为实施本文描述的一种或多种方法,诸如一种或多种表示为计算机程序的算法4300,这些计算机程序存储在非暂时性计算机可读存储介质诸如存储器4260 中。在本技术的一些形式中,中央控制器4230可以与rpt装置4000 集成。然而,在本技术的一些形式中,一些方法可以通过远程定位装置来执行。例如,远程定位装置可以通过对诸如来自本文描述的任何传感器的存储数据进行分析来确定呼吸机的控制设定值或检测呼吸相关事件。
266.5.4.2.4时钟
267.rpt装置4000可以包括连接到中央控制器4230的时钟4232。
268.5.4.2.5治疗装置控制器
269.在本技术的一种形式中,治疗装置控制器4240为治疗控制模块 4330,其构成由中央控制器4230执行的算法4300的一部分。
270.在本技术的一种形式中,治疗装置控制器4240为专用电动机控制集成电路。例如,在一种形式中,使用由onsemi制造的mc33035 无刷直流dc电动机控制器。
271.5.4.2.6保护电路
272.根据本技术的一个或多个保护电路4250可以包括电气保护电路、温度和/或压力安全电路。
273.5.4.2.7存储器
274.根据本技术的一种形式,rpt装置4000包括存储器4260,例如非易失性存储器。在一些形式中,存储器4260可以包括电池供电的静态ram。在一些形式中,存储器4260可以包括易失性ram。
275.存储器4260可以位于pcba 4202上。存储器4260可以是eeprom 或nand闪存的形式。
276.另外地或可替代地,rpt装置4000包括可移除形式的存储器4260,例如根据安全数字(sd)标准制成的存储卡。
277.在本技术的一种形式中,存储器4260用作非暂时性计算机可读存储介质,其上存储表示本文描述的一种或多种方法的计算机程序指令,诸如一个或多个算法4300。
278.5.4.2.8数据通信系统
279.在本技术的一种形式中,提供了数据通信接口4280,并且其连接到中央控制器4230。数据通信接口4280可以连接到远程外部通信网络 4282和/或本地外部通信网络
4284。远程外部通信网络4282可以连接到远程外部装置4286。本地外部通信网络4284可连接到本地外部装置 4288。
280.在一种形式中,数据通信接口4280为中央控制器4230的一部分。在另一种形式中,数据通信接口4280与中央控制器4230分离,并可以包括集成电路或处理器。
281.在一种形式中,远程外部通信网络4282为因特网。数据通信接口 4280可以使用有线通信(例如,经由以太网或光纤)或无线协议(例如,cdma、gsm、lte)连接到因特网。
282.在一种形式中,本地外部通信网络4284利用一种或多种通信标准,诸如蓝牙或消费者红外协议。
283.在一种形式中,远程外部装置4286为一台或多台计算机,例如网络计算机的群集。在一种形式中,远程外部装置4286可以为虚拟计算机,而非实体计算机。在任一情况下,此远程外部装置4286可以由适当授权人员(诸如临床医生)进行访问。
284.本地外部装置4288可以为个人计算机、移动电话、平板或远程控制装置。
285.5.4.2.9包括任选的显示器、警报器的输出装置
286.根据本技术的输出装置4290可以采取视觉、音频和触觉单元中的一种或多种的形式。视觉显示器可以是液晶显示器(lcd)或者发光二极管(led)显示器。
287.5.4.2.9.1显示器驱动器
288.显示器驱动器4292接收作为输入的字符、符号或图像用于显示在显示器4294上,并将它们转换成使显示器4294显示那些字符、符号或图像的命令。
289.5.4.2.9.2显示器
290.显示器4294被配置为响应于从显示器驱动器4292接收的命令可视地显示字符、符号或图像。例如,显示器4294可以为八段显示器,在这种情况下,显示器驱动器4292将每个字符或者符号(诸如数字“0”) 转换成八个逻辑信号,该逻辑信号指示这八个相应的节段是否将被激活以显示特定的字符或符号。
291.5.4.3rpt装置算法
292.如上所提及的,在本技术的一些形式中,中央控制器4230被配置为实施一个或多个算法4300,算法4300被表示为存储在非暂时性计算机可读存储介质(诸如存储器4260)中的计算机程序。算法4300通常被分组为被称为模块的群组,例如,见图5f。
293.5.4.3.1预处理模块
294.根据本技术的一种形式的预处理模块4310接收来自转换器4270 (例如流量传感器4274或压力传感器4272)的信号作为输入,并执行一个或多个处理步骤,以计算将被用作另一模块(例如治疗引擎模块 4320)的输入的一个或多个输出值。
295.在本技术的一种形式中,输出值包括接口或面罩压力pm、呼吸流量qr和泄漏流量ql。
296.在本技术的各种形式中,预处理模块4310包括以下算法的一个或多个:压力补偿4312、通气流量估算4314、泄漏流量估算4316和呼吸流量估算4318。
297.5.4.3.1.1压力补偿
298.在本技术的一种形式中,压力补偿算法4312接收指示气动块出口的近侧的气动路径中的压力的信号作为输入。压力补偿算法4312估算通过空气回路4170的压降,并提供患者接口3000中的估算压力pm作为输出。
299.5.4.3.1.2通气流量估算
300.在本技术的一种形式中,通气流量估算算法4314接收患者接口 3000中的估算压力pm作为输入,并估算来自患者接口3000中的通气口3400的空气通气流量qv。
301.5.4.3.1.3泄漏流量估算
302.在本技术的一种形式中,泄漏流量估算算法4316接收总流量qt 和通气流量qv作为输入,并提供估算的泄漏流量ql作为输出。在一种形式中,泄漏流量估算算法通过计算总流量qt和通气流量qv之间的差值在足够长至包括几个呼吸周期(例如大约10秒)的时间段内的平均值,来估算泄漏流量ql。
303.在一种形式中,泄漏流率估算算法4316接收患者接口3000中的总流量qt、通气流量qv和估算压力pm作为输入,并通过计算泄漏电导并确定作为泄漏电导的函数的泄漏流量ql和压力pm,来提供泄漏流量ql作为输出。泄漏电导被计算为等于总流量qt与通气流量qv之间的差值的低通滤波的非通气流量与低通滤波的压力pm的平方根的商,其中低通滤波时间常数具有足够长至包括几个呼吸周期(例如大约10秒)的值。泄漏流量ql可以被估算为泄漏电导与压力pm的函数的乘积。
304.5.4.3.1.4呼吸流量估算
305.在本技术的一种形式中,呼吸流量估算算法4318接收总流率qt、通气流量qv和泄漏流量ql作为输入,并通过从总流量qt中减去通气流量qv和泄漏流量ql,来估算到患者的空气呼吸流量qr。
306.5.4.3.2治疗引擎模块
307.在本技术的一种形式中,治疗引擎模块4320接收患者接口3000 中的压力pm和到患者的空气呼吸流量qr中的一个或多个作为输入,并提供一个或多个治疗参数作为输出。
308.在本技术的一种形式中,治疗参数为治疗压力pt。
309.在本技术的一种形式中,治疗参数为压力变化幅度、基础压力和目标通气量中的一个或多个。
310.在各种形式中,治疗引擎模块4320包括以下算法中的一个或多个:相位确定4321、波形确定4322、通气量确定4323、吸气流限制确定 4324、呼吸暂停/呼吸不足确定4325、打鼾确定4326、气道开放性确定 4327、目标通气量确定4328和治疗参数确定4329。
311.5.4.3.2.1相位确定
312.在本技术的一种形式中,rpt装置4000不确定相位。
313.在本技术的一种形式中,相位确定算法4321接收指示呼吸流量 qr的信号作为输入,并提供患者1000的当前呼吸周期的相位φ作为输出。
314.在一些形式中,被称作离散相位确定,相位输出φ为离散变量。离散相位确定的一种实施方式提供了具有吸气值或呼气值的双值相位输出φ,例如在分别检测自发性吸气和呼气的开始时,分别表示为0 转和0.5转的值。“触发”和“循环”的rpt装置4000有效地执行离散相位确定,因为触发点和循环点是相位分别从呼气变为吸气和从吸气变为呼气的时刻。在双值相位确定的一种实施方式中,相位输出φ,当呼吸流量qr具有超过正阈值的值时,被确定为具有离散值0(从而“触发”rpt装置4000),当呼吸流量qr具有比负阈值更大的负值时,被确定为具有离散值0.5转(从而“循环”rpt装置4000)。吸气时间ti和呼气时间te可以被估算为在相位φ分别等于0(指示吸气)和 0.5(指示呼气)的许多呼吸循环中所花费
的时间的典型值。
315.离散相位确定的另一种实施方式提供了三值相位输出φ,其值为吸气、吸气中间的暂停和呼气中的一种。
316.在其他形式中,被称作连续相位确定,相位输出φ为连续变量,例如从0至1转或者从0至2π弧度变化。当相位分别达到0转和0.5 转时,可以触发和循环执行连续相位确定的rpt装置4000。在连续相位确定的一种实施方式中,使用呼吸流量qr的模糊逻辑分析来确定相位φ的连续值。在该实施方式中确定的相位的连续值通常被称为“模糊相位”。在模糊相位确定算法4321的一种实施方式中,以下规则适用于呼吸流量qr:
317.1.如果呼吸流量为0且快速增加,则相位为0转。
318.2.如果呼吸流量为大的正数且稳定,则相位为0.25转。
319.3.如果呼吸流量为0且快速下降,则相位为0.5转。
320.4.如果呼吸流量为大的负数且稳定,则相位为0.75转。
321.5.如果呼吸流量为0且稳定,并且呼吸流量的5秒低通滤波绝对值较大,则相位为0.9转。
322.6.如果呼吸流量为正数且相位为呼气,则相位为0转。
323.7.如果呼吸流量为负数且相位为吸气,则相位为0.5转。
324.8.如果呼吸流量的5秒低通滤波绝对值较大,相位以等于患者呼吸速率的稳定速率增加,则低通滤波的时间常数为20秒。
325.每种规则的输出可以表示为向量,其相位是规则的结果,其大小是规则为真的模糊程度。呼吸流量“大”、“稳定”等的模糊程度由合适的隶属函数确定。表示为向量的规则的结果然后被一些诸如取质心的函数所组合。在这样的组合中,规则可以是同等加权的,也可以是不同加权的。
326.在连续相位确定的另一种实施方式中,如上所述,首先根据呼吸流量qr离散地估算相位φ,吸气时间ti和呼气时间te也是如此。任何时刻的连续相位φ可以被确定为自先前触发时刻起已经过去的吸气时间ti的一半比例,或者0.5转加上自先前循环时刻起已经过去的呼气时间te的一半比例(无论哪个时刻更近)。
327.5.4.3.2.2波形确定
328.在本技术的一种形式中,治疗参数确定算法4329在患者的整个呼吸周期中提供了近似恒定的治疗压力。
329.在本技术的其他种形式中,治疗控制模块4330控制压力发生器 4140,以根据波形模板π(φ)来提供根据患者呼吸周期相位φ而变化的治疗压力pt。
330.在本技术的一种形式中,波形确定算法4322为波形模板π(φ)提供由相位确定算法4321提供的相位φ的值域上的范围[0,1]内的值,以供治疗参数确定算法4329使用。
[0331]
在一种形式中,适用于离散或连续值相位的波形模板π(φ)为方波模板,对于0.5转及以下的相位值,其值为1,并且对于0.5转以上的相位值,其值为0。在一种形式中,适用于连续值相位的波形模板π(φ) 包括两个平滑弯曲的部分,即对于0.5转以下的相位值,平滑弯曲(例如升余弦)从0上升至1,对于0.5转以上的相位值,平滑弯曲(例如指数)从1下降至0。在一种形式中,适用于连续值相位的波形模板π(φ) 基于方波,但对于“上升时间”以下即小于0.5转的相位值,平滑从0 上升至1,并且对于0.5转后“下降时间”内(“下降时
间”即小于0.5 转)的相位值,平滑从1降至0。
[0332]
在本技术的一些形式中,波形确定算法4322根据rpt装置的设置,从波形模板库中选择波形模板π(φ)。库中的每个波形模板π(φ) 可以作为相对于相位值φ的值π的查找表来提供。在其他形式中,波形确定算法4322使用预定函数形式“动态地(on the fly)”计算波形模板π(φ),可能由一个或多个参数(例如指数曲线部分的时间常数) 参数化。函数形式的参数可以是预定的或者取决于患者1000的当前状态。
[0333]
在本技术的一些形式中,适用于吸气(φ=0转)或呼气(φ=0.5 转)的离散双值相位,波形确定算法4322计算“动态地”根据自最近触发时刻起测量的离散相位φ和时间t两者的波形模板π。在一种这样的形式中,波形确定算法4322计算如下两个部分(吸气和呼气)中的波形模板π(φ,t):
[0334][0335]
其中,πi(t)和πe(t)是波形模板π(φ,t)的吸气和呼气部分。在一种这样的形式中,波形模板的吸气部分πi(t)是由上升时间参数化的从0 至1的平滑上升,波形模板的呼气部分πe(t)是由下降时间参数化的从 1至0的平滑下降。
[0336]
5.4.3.2.3通气量确定
[0337]
在本技术的一些形式中,通气量确定算法4323接收呼吸流量qr 作为输入,并确定指示当前患者通气量的量度vent。
[0338]
在一些实施方式中,通气量确定算法4323确定通气量的量度vent,该量度是实际患者通气量的估算。一种这样的实施方式是取呼吸流量 qr的绝对值的一半,可选地由低通滤波器诸如具有0.11hz角频率的二阶贝塞尔低通滤波器来滤波。
[0339]
在其他实施方式中,通气量确定算法4323确定通气量的量度vent,该量度与实际患者通气量大体上成正比。一种这样的实施方式估算周期中吸气部分的峰值呼吸流量qpeak。假设流量波形形状变化不大(在此,当在时间和幅度上标准化的呼吸的流量波形相类似时,两次呼吸的形状被看作是相类似的),这种和许多其他涉及对呼吸流量qr采样的程序产生了与通气量大体上成正比的量度。一些简单的示例包括正呼吸流量的中位数、呼吸流量绝对值的中位数和流量的标准差。使用正系数的呼吸流量的绝对值的任意阶统计量的任意线性组合,甚至一些使用正和负系数两种的组合,都近似与通气量成正比。另一个示例是吸气部分的中间k比例(按时间)中的呼吸流量的平均值,其中0《k《1。如果流量形状不变,则有任意的大量的量度与通气量正好成正比。
[0340]
5.4.3.2.4吸气流限制的确定
[0341]
在本技术的一种形式中,中央控制器4230执行吸气流限制确定算法4324,用于确定吸气流限制的程度。
[0342]
在一种形式中,吸气流限制确定算法4324接收呼吸流量信号qr 作为输入,并提供呼吸的吸气部分展示出吸气流限制的程度的度量作为输出。
[0343]
在本技术的一种形式中,每次呼吸的吸气部分由过零检测器来识别。代表时间点的若干均匀间隔的点(例如,65个)由插值器沿着每次呼吸的吸气流量的时间曲线进行插值。由点描述的曲线然后由标量按比例缩放,以具有单位长度(持续时间/周期)和单位面
积,从而消除改变呼吸速率和深度的影响。然后,在比较器中将经缩放的呼吸与代表正常未阻塞呼吸的预存模板进行比较,类似于图6a所示的呼吸的吸气部分。在根据该模板吸气过程中的任何时间处,偏离多于指定阈值(通常为1个比例单位)的呼吸,诸如由测试元件确定的诸如那些由于咳嗽、叹气、吞咽和打嗝引起的呼吸被拒绝。对于未拒绝的数据,由中央控制器4230为前面的几个吸气事件计算第一个这样的缩放点的移动平均数。对于第二个这样的点,在相同的吸气事件上重复这样的计算,以此类推。因此,例如,由中央控制器4230生成65个按比例缩放的数据点,并且代表前面几个吸气事件例如三个事件的移动平均数。(例如,65个)点的连续更新值的移动平均数在下文中被称为“比例流量”,指定为qs(t)。可替代地,可以使用单个吸气事件,而非移动平均数。
[0344]
根据比例流量,可以计算出与确定部分阻塞相关的两个形状因数。
[0345]
形状因数1是中间(例如32个)比例流量点的平均值与总(例如 65个)比例流量点的平均值的比率。当这个比率超过单位值(unity) 时,呼吸将被视为正常。当比率等于或小于单位值时,呼吸将被视为受阻。约1.17的比率被认为是部分受阻呼吸与无阻塞呼吸之间的阈值,并且等同于允许在典型患者中维持足够氧合的阻塞程度。
[0346]
形状因数2被计算为中间(例如,32)点与单位比例流量的rms 偏差。约0.2个单位的rms偏差被视为正常。rms偏差为0被视为完全限流呼吸。rms偏差越接近零,呼吸就越受流限制。
[0347]
形状因数1和2可以用作替代形式,或者组合使用在本技术的其他形式中,采样点、呼吸和中间点的数量可能与上述那些不同。此外,阈值也可以不同于所描述的那些。
[0348]
5.4.3.2.5呼吸暂停和呼吸不足的确定
[0349]
在本技术的一种形式中,中央控制器4230执行呼吸暂停/呼吸不足确定算法4325,用于确定呼吸暂停和/或呼吸不足的存在。
[0350]
在一种形式中,呼吸暂停/呼吸不足确定算法4325接收呼吸流量信号qr作为输入,并提供指示已经检测到呼吸暂停或呼吸不足的标志作为输出。
[0351]
在一种形式中,当呼吸流量qr的函数在预定时间段内降至低于流量阈值时,可以说已经检测到呼吸暂停。该函数可以确定峰值流量、相对短期的平均流量或相对短期的平均和峰值流量之间的流量,例如 rms流量。流量阈值可以是相对长期的流量量度。
[0352]
在一种形式中,当呼吸流量qr的函数在预定时间段内降至低于第二流量阈值时,可以说已经检测到呼吸不足。该函数可以确定峰值流量、相对短期的平均流量或相对短期的平均和峰值流量之间的流量,例如rms流量。第二流量阈值可以是相对长期的流量量度。第二流量阈值大于用于检测呼吸暂停的流量阈值。
[0353]
5.4.3.2.6打鼾的确定
[0354]
在本技术的一种形式中,中央控制器4230执行一个或多个打鼾确定算法4326,用于确定打鼾的程度。
[0355]
在一种形式中,打鼾确定算法4326接收呼吸流量信号qr作为输入,并提供存在打鼾的情况的程度的度量作为输出。
[0356]
打鼾确定算法4326可以包括在30-300hz范围内确定流量信号强度的步骤。进一步地,打鼾确定算法4326可以包括对呼吸流量信号 qr进行滤波的步骤,以降低背景噪声,例如系统中来自鼓风机的空气流的声音。
[0357]
5.4.3.2.7气道开放性的确定
[0358]
在本技术的一种形式中,中央控制器4230执行一个或多个气道开放性确定算法4327,用于确定气道开放性程度。
[0359]
在一种形式中,气道开放性确定算法4327接收呼吸流量信号qr 作为输入,并确定信号在约0.75hz和约3hz频率范围内的功率。在该频率范围内存在峰值被视为指示气道打开。不存在峰值被视为指示气道关闭。
[0360]
在一种形式中,寻找峰值的频率范围是治疗压力pt中的小的强制振荡的频率。在一种实施方式中,强制振荡的频率为2hz,振幅约1 cmh2o。
[0361]
在一种形式中,气道开放性确定算法4327接收呼吸流量信号qr 作为输入,并确定是否存在心源性信号。不存在心源性信号被视为指示气道关闭。
[0362]
5.4.3.2.8目标通气量的确定
[0363]
在本技术的一种形式中,中央控制器4230将当前通气量的量度 vent作为输入,并执行一个或多个目标通气量确定算法4328,用于确定对于通气量量度的目标值vtgt。
[0364]
在本技术的一些形式中,没有目标通气量确定算法4328,并且目标值vtgt是预确的,例如通过在rpt装置4000的配置过程中硬编码或者通过输入装置4220手动输入。
[0365]
在本技术的一些形式中,诸如自适应性伺服通气(asv),目标通气量确定算法4328根据指示患者的典型近期通气量的值vtyp来计算目标值vtgt。
[0366]
在自适应性伺服通气的一些形式中,目标通气量vtgt被计算为比例很高,但低于典型近期通气量vtyp。这种形式的高比例可能在(80%,100%),或(85%,95%)或(87%,92%)范围内。
[0367]
在自适应性伺服通气的其他形式中,目标通气量vtgt被计算为略微大于典型近期通气量vtyp的1倍。
[0368]
典型近期通气量vtyp是这样一个值,当前通气量的量度vent在某个预定时间尺度上的多个时间时刻上的分布趋向于围绕该值聚集,即当前通气量的量度在近期历史上的中心趋势的量度。在目标通气量确定算法4328的一种实施方式中,近期历史是大约几分钟,但无论如何应该比潮式呼吸(cheyne-stokes)盛衰周期的时间尺度更长。目标通气量确定算法4328可以使用多种众所周知的集中趋势的量度中的任何一种来根据当前通气量的量度确定典型的近期通气量vtyp。一种这样的量度是低通滤波器对当前通气量的量度vent的输出,时间常数等于 100秒。
[0369]
5.4.3.2.9治疗参数的确定
[0370]
在本技术的一些形式中,中央控制器4230执行一个或多个治疗参数确定算法4329,用于使用由治疗引擎模块4320中的一个或多个其他算法返回的值来确定一个或多个治疗参数。
[0371]
在本技术的一种形式中,治疗参数是瞬时治疗压力pt。在这种形式的一种实施方式中,治疗参数确定算法4329使用以下等式来确定治疗压力pt:
[0372]
pt=aπ(φ,t)+p0ꢀꢀꢀꢀꢀ
(1)
[0373]
其中:
[0374]
·
a是振幅,
[0375]
·
π(φ,t)是当前相位值φ和时间t时的波形模板值(在0至1 的范围内),以及
[0376]
·
p0是基础压力。
[0377]
如果波形确定算法4322提供波形模板π(φ,t)作为由相位φ索引的值π的查找表,则治疗参数确定算法4329通过将最近的查找表条目定位到由相位确定算法4321返回的相位的当前值φ,或者通过在跨越相位的当前值φ的两个条目之间的插值,来应用等式(1)。
[0378]
振幅a和基础压力p0的值可以由治疗参数确定算法4329根据选定的呼吸压力治疗模式以下面描述的方式来设置。
[0379]
5.4.3.3治疗控制模块
[0380]
根据本技术的一个方面的治疗控制模块4330接收来自治疗引擎模块4320的治疗参数确定算法4329的治疗参数作为输入,并控制压力发生器4140根据治疗参数输送空气流。
[0381]
在本技术的一种形式中,治疗参数为治疗压力pt,并且治疗控制模块4330控制压力发生器4140输送其在患者接口3000处的面罩压力 pm等于治疗压力pt的空气流。
[0382]
5.4.3.4故障状况检测
[0383]
在本技术的一种形式中,中央控制器4230执行一个或多个方法 4340(故障检测算法4340),用于检测故障状况。由一个或多个方法检测到的故障状况可以包括以下各项中的至少一项:
[0384]
·
电源故障(无电力或电力不足)
[0385]
·
转换器故障检测
[0386]
·
未能检测到部件的存在
[0387]
·
建议范围之外的运行参数(如压力、流量、温度、pao2)
[0388]
·
测试报警未能产生可检测的报警信号。
[0389]
在检测到故障状况时,相应故障状况检测算法4340通过以下各项中的一项或多项来发信号通知故障的存在:
[0390]
·
启动听觉、视觉和/或动态(例如振动)警报
[0391]
·
发送消息至外部装置
[0392]
·
事件日志
[0393]
5.5空气回路
[0394]
根据本技术一个方面的空气回路4170为导管或管子,其在使用时被构造和布置为允许空气流在两个部件诸如rpt装置4000与患者接口 3000之间行进。
[0395]
具体地,空气回路4170可以与气动块4020的出口和患者接口流体连接。空气回路可以被称为空气输送管。在一些情况下,可以具有用于吸气和呼气回路的独立分支。在其他情况下,使用单个分支。
[0396]
在一些形式中,空气回路4170可以包括一个或多个加热元件,该加热元件被配置为加热空气回路中的空气,例如以维持或升高空气的温度。加热元件可以是加热丝回路的形式,并且可以包括一个或多个转换器,诸如温度传感器。在一种形式中,加热丝回路可以围绕空气回路4170轴螺旋缠绕。加热元件可以与诸如中央控制器4230的控制器相连通。在美国专利8,733,349中描述了包括加热丝回路的空气回路 4170的一个示例,该专利申请通过引用整体并入本文中。
[0397]
5.6氧气输送
[0398]
在本技术的一种形式中,补充氧4180被输送至气动路径中的一个或多个点(诸如气动块4020的上游)、空气回路4170和/或患者接口 3000。
[0399]
5.7湿化器
[0400]
5.7.1湿化器概况
[0401]
在本技术的一种形式中,提供了湿化器5000(例如,如图5c所示),以相对于周围环境空气改变用于输送到患者的空气或气体的绝对湿度。通常,湿化器5000用于在输送到患者的气道之前增加空气流的绝对湿度并增加空气流的温度(相对于周围环境空气)。
[0402]
5.7.2 rpt装置和湿化器
[0403]
图6a、图6b和图7图示了根据本技术的示例的集成rpt装置及湿化器6000。如所图示的,集成rpt装置及湿化器6000包括贮存器底座6050,其被构造和布置为接收水贮存器6100(也被称为湿化器水桶或湿化器贮存器)。在图示的示例中,集成rpt装置及湿化器6000 包括与rpt装置集成的湿化器,使得rpt装置的气动块7100包括执行rpt装置功能的部件以及执行湿化器功能的部件。例如,如图7所示,贮存器底座6050与rpt装置的气动块7100集成,以提供整体单元,贮存器底座6050被构造和布置为接收水贮存器6100。
[0404]
应当认识到的是,在替代布置中,湿化器(例如,贮存器底座6050) 可以独立于rpt装置(例如,气动块7100)设置。在这样的布置中,额外的接口可以用于将湿化器(例如,贮存器底座6050)连接到rpt 装置(例如,气动块7100)。
[0405]
rpt装置包括支撑在气动块7100内的鼓风机。鼓风机被构造和布置为用于产生正压下(例如,在2-50cmh2o的范围内)的空气流或空气供应。在一示例中,鼓风机可以包括单级设计或多级设计,例如两级或更多级设计。鼓风机可运行以将空气供应吸入气动块7100,例如通过气动块中的一个或多个进气开口,以及进入其入口(鼓风机入口),并在出口(鼓风机出口)处提供加压空气供应。pct专利申请公开号 wo 2013/020167中描述了示例性鼓风机的示例和细节,该专利通过引用整体并入本文。鼓风机出口与湿化器连通,例如水贮存器6100的入口。
[0406]
气动块7100包括底架组件7300,例如,包括顶部底架和底部底架。底架组件7300包括底架入口(未示出)和底架出口7320(例如,见图25和图27)。在一示例中,外壳包括一个或多个面板和/或一个或多个用户输入/显示器,其可以围住气动块7100,例如,见图6a和图6b。底架组件7300支撑和/或容纳气动块7100的内部部件,例如鼓风机。底架组件7300还支撑印刷电路板组件(pcba)7600,该pcba 7600可以包括一个或多个参考pcba 4202描述的部件和特征。底架组件7300和气动块的内部部件配合形成气动空气流路径,该路径从底架入口延伸到鼓风机的鼓风机入口,并从鼓风机的鼓风机出口延伸到底架出口7320。当水贮存器接收在贮存器底座6050中时,底架出口7320 适于与贮存器底座6050和水贮存器6100的入口连通。贮存器底座6050 还被配置和布置为允许水贮存器6100的出口与空气回路4170之间的连通,如下文更详细描述的。
[0407]
5.7.3湿化器部件
[0408]
5.7.3.1水贮存器
[0409]
图6a、图6b和图8示出了根据本技术的一示例的水贮存器6100。水贮存器6100被配置为盛装或保持一定体积的液体(例如水),该液体将被蒸发用于空气流的加湿。水贮存器
6100可以被配置为盛装预定最大体积的水,以便提供充分加湿持续至少呼吸疗程的持续期间,诸如睡眠的一个晚上。通常,水贮存器被配置为保持几百毫升的水,例如,300毫升(ml)、325ml、350ml或400ml,尽管可以理解的是,可以利用其他体积的液体,例如至少100ml。在其他形式中,湿化器可以被配置为接收来自外部水源诸如建筑物的供水系统的水供给。
[0410]
在图示的示例中,水贮存器6100包括贮存器基座6112(也被称为贮存器主体、湿化器水桶基座或湿化器水桶主体)和可移除地联接至贮存器基座6112的贮存器盖子6114(也称为湿化器水桶盖子)。可变形密封件可以设置于贮存器盖子和/或贮存器基座。当贮存器盖子 6114联接至贮存器基座6112时,密封件被构造和布置为接合在贮存器盖子6114与贮存器基座6112之间,以密封盖子和基座并防止水从水贮存器流出。贮存器盖6114可以被构造为可从贮存器基座6112完全移除,例如,用于患者便于清洁贮存器基座和/或贮存器盖子的内部。在替代示例中,贮存器盖子6114可以永久地附接到贮存器基座6112。
[0411]
根据一个方面,水贮存器6100被配置为当空气流行进通过其中时为来自rpt装置的空气流增加湿度。在一种形式中,水贮存器6100 可以被配置为鼓励空气流在与其中的一定体积的水接触的同时在通过贮存器的弯曲路径中行进。例如,水贮存器6100可以包括一个或多个流动元件,例如导流板,以鼓励曲折的流动路径。
[0412]
如下文更详细描述的,水贮存器6100可以与贮存器底座6050可移除地联接。在一示例中,水贮存器的插入/移除可以沿着沿前后方向延伸的路径设置。在替代示例中,用于插入/移除水贮存器的路径的至少一部分可以沿上下方向延伸,例如,用于插入的路径的至少一部分包括斜坡或下降至进入运行位置。
[0413]
水贮存器6100还可以被配置为阻止液体从其中流出,诸如当贮存器从其正常的工作方位移位和/或旋转时,诸如通过任何孔和/或在其子部件之间。由于要由湿化器加湿的空气流通常是加压的,因此贮存器也可以被配置为防止由于泄漏和/或流动阻抗而导致的气动压力损失。
[0414]
贮存器基座
[0415]
如图8所示,贮存器基座6112包括主体6140,该主体6140包括多个壁和传导性部分6150,传导性部分6150通常设置在其中一个壁的底部,以形成盛装一定体积水的腔室或空腔。
[0416]
贮存器基座6112被构造和布置为与贮存器盖子6114接合或对接。
[0417]
贮存器基座6112可以被构造和布置为将贮存器盖子6114保持到贮存器基座6112,例如,铰链布置和/或卡扣配合锁定片,以将贮存器盖子可释放地保持到贮存器基座。
[0418]
传导性部分
[0419]
传导性部分6150被配置为允许热量从加热元件(例如,图6b中所示出的贮存器底座6050的加热器板6080)到贮存器中的一定体积的液体的有效传递。在一种形式中,传导性部分可以被布置为板,但是其他形状也可同样适用。传导性部分的全部或一部分可以由导热材料制成,诸如铝(例如,厚度大约2mm,诸如1mm、1.5mm、2.5mm 或3mm)、另一种导热金属或一些塑料。在某些情况下,可以用传导性较低的适当几何结构的材料来实现适当的热传导性。
[0420]
包括金属板和/或薄膜的传导性部分
[0421]
在一个示例中,传导性部分6150可以包括金属板、非金属薄膜(也被称为薄膜板或
薄膜基座),或者金属板和非金属薄膜的组合分层布置。如下所述,传导性部分6150被配置为与贮存器底座6050的加热器板6080热联接,以允许热量从加热器板6080热转移到水贮存器6100 中的一定体积的液体。
[0422]
5.7.3.2贮存器底座
[0423]
贮存器底座6050可以设置于rpt装置的底架组件7300,并且被配置和布置为接收水贮存器6100。在一些布置中,贮存器底座6050可以包括锁定特征,诸如锁定杆或突片,其被配置为将水贮存器6100保持在贮存器底座6050中。
[0424]
贮存器底座6050包括形成空腔以接收水贮存器6100的主体。如图27中最佳示出的,贮存器底座6050的后壁包括底架出口7320(也被称为底座入口),其被构造和布置为接收来自rpt装置的出口的加压空气流,用于输送到水贮存器6100。贮存器底座6050还可以包括底座出口,该底座出口被构造和布置为连接或以其他方式与空气输送管 4170或中间部件(例如,中间部件6700、中间部件8700或中间部件 9700)对接,然后中间部件连接到空气输送管4170。在本技术的一示例中,贮存器底座6050可以允许空气输送管4170与水贮存器6100形成直接的气动连接,使得已经在水贮存器6100中加湿的加压空气流被直接从水贮存器6100输送到空气输送管4170。
[0425]
贮存器底座6050的主体包括多个壁和一个加热元件(例如,加热器板6080),该加热元件设置在其中一个壁的底部,以形成接收水贮存器6100的空腔。
[0426]
5.7.3.3水贮存器到贮存器底座的连接
[0427]
在使用中,水贮存器6100通过将其插入贮存器底座6050而可移除地与贮存器底座6050联接。在水贮存器被布置为与空气输送导管4170直接接合的情况下,当水贮存器6100联接至贮存器底座6050时,水贮存器6100的入口管6120(或入口)的入口密封件被构造和布置为提供与贮存器底座6050的底架出口7320(底座入口)的面密封。类似地,水贮存器6100的出口管6130(或出口)的出口密封件6132被构造为提供与空气回路或空气输送管4170的面密封,例如,以防止通过泄漏而引起的气动压力损失。在替代示例中,水贮存器6100被构造和布置为与空气输送管导管4170形成直接气动密封,从而完全绕过rpt 装置和贮存器底座6050。贮存器底座6050促进这种直接连接,而并非其一部分。
[0428]
从空气输送路径移除rpt装置和贮存器底座6050消除了水贮存器6100与空气输送导管4170之间的位于内部的联接部件的存在。这消除了拆卸和消毒这种联接部件的需要,从而使消毒变得更加容易。以此方式,当为不同的用户准备该装置时,水贮存器6100是rpt装置中需要更换或消毒的唯一部件。
[0429]
当水贮存器6100被插入贮存器底座6050并到达运行位置时,水贮存器6100的传导性部分6150与贮存器底座6050的加热器板6080 对准并热接触,以允许热量从加热器板6080转移到水贮存器6100中的水,例如,传导性部分6150的表面接合或接触加热器板6080的表面。可以引入偏压机构,其将水贮存器和加热器板压向彼此,从而改变传导性部分与加热器板之间的热接触水平。在一个示例中,提供给水贮存器、贮存器底座和/或加热器板的弹簧元件可以被布置为将水贮存器和加热器板朝向彼此偏压,以增加接触压力并改善热接触。
[0430]
底架出口7320(底座入口)被配置为接收来自rpt装置的鼓风机的加压空气流,并经由水贮存器6100的入口管6120将空气流传至水贮存器6100中。当空气通过水贮存器6100
行进时,湿气(即,水蒸汽)被添加到空气流中,并且加湿的空气流通过出口管6130离开水贮存器。空气直接从出口管6130流入空气输送管4170,以将加湿的空气流输送给患者。
[0431]
5.7.3.4用于插入/移除的引导结构
[0432]
在一示例中,水贮存器6100的外侧部分提供了底座接合部分,该底座接合部分被构造和布置为与贮存器底座6050的贮存器接合部分对接和接合。在一示例中,水贮存器6100和贮存器底座6050可以包括引导结构,以促进水贮存器6100与贮存器底座6050的插入、移除和对准。
[0433]
例如,如图6b所示,水贮存器6100的沿着底座接合部分的相对侧可以包括引导表面(例如由导向轨6200提供),该引导表面被布置为沿着贮存器底座6050的贮存器接合部分接合相应引导表面(例如,由导向槽6060提供),以将水贮存器6100引导到贮存器底座6050中。
[0434]
在一示例中,如图6b所示,水贮存器6100可以沿着沿横向(即,前后方向)延伸的路径插入(例如,仅通过滑动或推/拉)贮存器底座 6050的空腔和从其中移除。
[0435]
在替代示例中,用于插入/移除水贮存器的路径的至少一部分可以沿上下方向延伸,例如,用于将水贮存器插入底座的路径的至少一部分包括斜坡,诸如提升或下降至进入运行位置。
[0436]
例如,水贮存器6100与贮存器底座6050的引导结构可以被构造和布置为提供水贮存器的初始水平或倾斜插入,随后在最后段下降至运行位置。在一示例中,贮存器底座可以提供具有位于底座底面上的内部边缘的倾斜表面,在水贮存器可以下降至其运行位置之前,必须通过水贮存器清洁该倾斜表面。已清洁的边缘和/或下降其本身可以有效地将水贮存器锁定在运行位置。还可以使用另外的锁定特征。这种“推下式”配置包括水桶的移动,该移动具有水平和垂直方向两个方向的分量。可选地包括边缘确保了在将水贮存器插入贮存器底座的过程中,水贮存器的基座接合单个边缘或小表面,而不是在大得多的表面上拖动。这减少了加热器板的任何磨损和潜在损坏。可以布置弹簧元件(例如,在贮存器底座与水贮存器之间),以增加水贮存器与加热器板之间的接触压力,例如,从而改善水贮存器的基座板与底座的加热器板之间的热接触。
[0437]
5.7.3.5保留特征
[0438]
在一示例中,如图6b所示,水贮存器6100可以包括闩锁6400,该闩锁6400被配置为可释放地与贮存器底座6050中的凹槽6055接合,以将水贮存器6100可释放地保持在贮存器底座6050内的运行位置。这种锁定布置防止水贮存器从底座脱离,在一些布置中,在装置运行过程中,底座内相对高的运行压力会促使水贮存器脱离。
[0439]
在图示的示例中,闩锁6400被设置为与水贮存器6100分开且与其不同的结构,然后被固定或以其他方式设置于处于运行位置的水贮存器6100,例如,闩锁6400包括固定于贮存器盖子6114或水贮存器 6100的其他部分的预制结构。在一示例中,闩锁6400包括塑料或热塑性聚合物材料。
[0440]
5.7.3.6空气输送管到贮存器底座的连接
[0441]
在一示例中,例如,如图9至图15所示,空气输送管4170包括管子部分4500,将空气输送管4170连接到贮存器底座6050和/或水贮存器6100的底座连接头/套囊4600(出口连接头),以及将空气输送管4170连接到患者接口3000的患者接口连接头/套囊(图1a至图1c 中
示出的入口连接头)。
[0442]
在一示例中,底座连接头4600被构造和布置为形成与贮存器底座 6050上的机械和/或电连接,并形成与水贮存器6100和/或与贮存器底座6050的气动连接。这些连接将空气输送管4170定位并固定于贮存器底座6050或水贮存器6100,向与空气输送管4170相关联的加热元件和转换器提供电力、信息和控制信号,和/或允许加湿的加压气体从水贮存器6100流向患者接口3000。在空气输送管4170与水贮存器6100 和贮存器底座6050接合的过程中,连接可以同时形成或串联形成,例如,机械、气动或电连接中的一种可以在其他连接之前完成。
[0443]
空气输送管4170的底座连接头4600包括保持特征,该保持特征提供了与贮存器底座6050的底座出口6090的固定的、不可旋转的连接。
[0444]
在一示例中,空气输送管4170可以包括多根围绕空气输送管4170 的轴螺旋缠绕的电线(例如,沿着空气输送导管4170的管子部分4500),例如,被配置为加热空气输送管中的空气和/或将来自一个或多个转换器(例如,温度传感器、流量传感器)的信号发送到rpt装置的控制器。
[0445]
在一示例中,空气输送管4170可以包括4根电线,例如,两根电线用于给一个或多个加热元件供电,并且两根电线用于连接温度传感器/转换器。然而,应该认识到的是,可以使用其他数量的电线,例如,两根电线、三根电线或五根或更多根电线。
[0446]
在一示例中,空气输送管4170的底座连接头4600包括接触组件,该触头组件包括触头,在使用中,这些触头与提供给贮存器底座6050 的相应触头相接合,以在底座出口处形成与贮存器底座的电连接,从而提供电力和/或控制信号发送。在一示例中,底座连接头4600的触头可以联结到沿着空气输送管4170延伸的相应电线。在替代示例中,至少一些触头与沿着空气输送管4170延伸的电线无关,但是其特征在于它们自身独立和/或独特的电特性(例如电阻、传导性等)。这种独立和/或独特的电特性可以用于识别管子/患者接口系统的一个或多个元件,或者这些元件的特性。
[0447]
在一示例中,贮存器底座6050的底座出口6090包括与贮存器底座内的电源和电信号连通的接触组件,例如pcba 7600。在一示例中,接触组件包括触头,这些触头对应于提供给空气输送管4170的底座连接头4600的若干触头,例如4个触头。
[0448]
因为空气输送管4170的接触组件中的每个触头或触头的组合可以具有独特的电特性,因此在一示例中,空气输送管4170的接触组件可以用作空气输送管4170和/或患者接口的各种参数的标识符。例如,接触组件可以被配置为提供空气输送管4170的类型(例如,非加热管、加热管、具有热湿交换器(hme)的管子、未知的管子)的识别、空气输送管的大小(例如,15mm、19mm)的识别、hme的存在的和类型的识别、连接到管子的患者接口的类型的识别等。来自识别的数据可以被控制器传送和使用,例如,以优化rpt装置、湿化器的运行,从而促进数据收集等。例如,控制器可以被配置为辨认由接触组件提供的唯一识别特征,使得控制器可以识别联接至贮存器底座6050的空气输送管4170的特定特性,因而控制器可以自动配置rpt装置和/或湿化器以优化运行。
[0449]
5.7.3.6.1卡口式连接和中间部件
[0450]
图9至图22图示了用于将空气输送管4170连接到贮存器底座6050和水贮存器6100的替代示例。在该示例中,中间部件6700可移除地联接至贮存器底座6050。中间部件6700被
配置为气动地将水贮存器6100连接到空气输送管4170,使得已经在水贮存器6100中加湿的加压空气流可以经由中间部件6700从水贮存器6100输送到空气输送管4170。同样,在该示例中,空气输送管4170的底座连接头4600被构造和布置为形成与贮存器底座6050的卡口式连接,这将空气输送管 4170与贮存器底座6050机械和/或电连接。也就是说,卡口式连接将空气输送管4170定位并固定于贮存器底座6050和/或向与空气输送管 4170相关联的加热元件和转换器提供电力、信息和控制信号。
[0451]
5.7.4湿化器转换器
[0452]
湿化器5000可以包括替代或除了上述转换器4270外的一个或多个湿化器转换器(传感器)5210。如图5g所示,湿化器转换器5210 可以包括空气压力传感器5212、空气流量转换器5214、温度传感器5216 或湿度传感器5218中的一个或多个。湿化器转换器5210可以产生一个或多个可以传送至控制器(诸如中央控制器4230和/或湿化器控制器 5250)的输出信号。在一些形式中,在将输出信号传送至控制器时,湿化器转换器可以位于湿化器5000的外部(诸如在空气回路4170中)。
[0453]
5.7.4.1压力转换器
[0454]
替代或除了设置在rpt装置4000中的压力传感器4272外,一个或多个压力转换器5212可以设置于湿化器5000。
[0455]
5.7.4.2流量转换器
[0456]
替代或除了设置在rpt装置中的流量传感器4274外,一个或多个空气流量转换器5214可以设置于湿化器5000。
[0457]
5.7.4.3温度转换器
[0458]
湿化器5000可以包括一个或多个温度转换器5216。一个或多个温度转换器5216可以被配置为测量一个或多个温度,诸如加热元件5240的和/或湿化器出口下游的空气流的温度。在一些形式中,湿化器 5000还可以包括用于检测周围环境空气温度的温度传感器5216。
[0459]
5.7.4.4湿度转换器
[0460]
在一种形式中,湿化器5000可以包括一个或多个检测气体(诸如周围环境空气)湿度的湿度传感器5218。在一些形式中,湿度传感器 5218可以朝向湿化器出口放置,以测量从湿化器5000输送的气体的湿度。湿度传感器可以是绝对湿度传感器或相对湿度传感器。
[0461]
5.7.5加热元件
[0462]
如图6b和其他图所示,加热器板6080用于将热量转移到水贮存器。在图示的示例中,加热器板可以形成贮存器底座6050的一部分,并且可以位于贮存器底座的基座上或靠近基座。加热器板的至少顶层包括硬的耐划伤表面,该表面可以由例如镍铬合金、不锈钢或阳极氧化铝制成。加热器板可以从加热元件转移热量。加热元件可以包括发热部件,诸如电阻性电加热轨。加热元件的一个合适的示例为层状加热元件,诸如在pct专利申请公开号wo 2012/171072中所描述的层状加热元件,该专利通过引用整体并入本文中。
[0463]
5.7.6湿化器控制器
[0464]
根据本技术的一种布置,如图5g所示,湿化器5000可以包括湿化器控制器5250。在一种形式中,湿化器控制器5250可以是中央控制器4230的一部分。在另一种形式中,湿化器控制器5250可以是独立的控制器,其可以与中央控制器4230通信。
[0465]
在一种形式中,湿化器控制器5250可以接收,例如水贮存器5110 和/或湿化器5000中空气流、水流的属性(诸如温度、湿度、压力和/ 或流量)的测量值作为输入。湿化器控制器5250还可以被配置为执行或实施湿化器算法和/或输送一个或多个输出信号。
[0466]
如图5g中所示,湿化器控制器5250可以包括一个或多个控制器,诸如中央湿化器控制器5251、被配置为控制加热空气回路4171的温度的加热空气回路控制器5254和/或被配置为控制加热元件5240的温度的加热元件控制器5252。
[0467]
5.8中间部件
[0468]
如图9至图22所示,中间部件6700设置于贮存器底座6050的底座出口6090,以气动地将水贮存器6100连接到空气输送管4170。在图示的示例中,中间部件6700可移除地联接至贮存器底座6050,使得中间部件6700可以拆卸,用于清洁、消毒和/或更换,例如用于多患者多用途(mpmu)应用。
[0469]
如图9至图22所示,中间部件6700包括管状主体6705,该管状主体6705包括适于与水贮存器6100对接的入口端6710和适于与空气输送管4170对接的出口端6720。中间部件6700还包括保持及对准特征,该保持及对准特征被构造和布置为将中间部件6700与贮存器底座 6050对准,并提供与贮存器底座6050的可移除的、不可旋转的连接。另外,中间部件6700包括端口6730,例如压力端口,其用于插入用于测量底座出口6090处的空气压力的传感器,或者声音端口,其用于将声音从中间部件6700内传播到中间部件6700外部的传感器。端口6730 包括端口密封件6735,以在传感器(例如压力传感器或声音传感器) 与中间部件6700之间提供密封界面。如本文稍后将讨论的,透声盖,例如以覆盖端口6730的膜的形式,也可以包括在该布置中。盖的主体可以与端口6730和端口密封件6735中的至少一者为一体。
[0470]
在图示的示例中,例如,见图22,管状主体6705(包括入口端 6710和出口端6720)连同保持及对准特征包括由相对刚性的材料(例如,热塑性聚合物(例如,pc、abs))构成的第一部分或基础模具。端口密封件6735包括由相对柔软的材料(例如,热塑性弹性体(tpe) 或硅树脂)构成的第二部分或包覆成型件,该第二部分或包覆成型件设置于第一部分(例如,通过包覆成型)。因此,中间部件6700提供基本上刚性的构造,例如,用于mpmu应用的耐久性。
[0471]
在图示的示例中,入口端6710与出口端6720成一定角度布置,例如,入口端的轴相对于出口端的轴成约90
°
布置。然而,应该认识到的是,也可以是其它合适的角度,例如,入口端的轴相对于出口端的轴成约45
°
布置。
[0472]
入口端6710的自由端包括包围管子开口的法兰或唇6712。法兰或唇6712提供接触表面6715。当水贮存器6100联接至贮存器底座6050 时,水贮存器6100的出口管6130(或出口)的出口密封件6132被构造为与入口端6710的接触表面6715接合并提供面密封。在替代实施例中,水贮存器6100的出口管6130(或出口)与入口端6710的接触表面6715之间的密封可以为入口端6710的整体部分,或者可以为独立于出口管6130或入口端6710的密封部分。在图示的示例中,接触表面6715包括进入管开口的锥形物,例如,以增强密封并防止泄漏。
[0473]
出口端6720可以包括iso锥形物,例如22mm的外径iso锥形物,用于联接至空气输送导管4170。
[0474]
关于保持及对准特征,中间部件6700包括一对弹性夹紧臂6740,即,悬臂式的弹簧
臂。如图12所示,弹簧或夹紧臂6740中的每一个可以包括倒钩端或突片6745,该倒钩端或突片6745被构造为提供与设置在贮存器底座6050的空腔内的相应锁定构件(例如,突出部6750) 的卡扣配合连接。如图12、图16和图18所示,中间部件6700还包括导向轨6760,该导向轨6760被构造和布置为通过与延伸到贮存器底座 6050的空腔中的相应导向槽6755相接合来辅助中间部件6700正确对准并插入贮存器底座6050中。进一步地,中间部件6700包括法兰6770,该法兰6770布置在入口端6710与出口端6720之间,以通过邻接设置于贮存器底座6050的法兰或壁来辅助将中间部件6700定位在贮存器底座6050中,例如,法兰在插入过程中用作止动件。中间部件6700 的法兰6770可以包括一个或多个切口或凹槽6772,例如,以容纳沿着设置于贮存器底座6050的法兰或壁的紧固件或突起部。
[0475]
当中间部件6700插入贮存器底座6050的底座开口6091时,中间部件6700被定向成使其导向轨6760与导向槽6755接合,导向槽6755 将中间部件6700正确对准并引导到运行位置。同样,底座开口6091 和/或由锁定和接触组件6900在底座开口6091处提供的开口包括非圆形轮廓,以促进中间部件6700在插入过程中的正确定向。当中间部件 6700到达运行位置时,弹簧或夹紧臂6740的倒钩端或突片6745被构造和布置为接合在相应突出部6750之上和/或之后,例如,见图12。每个倒钩端6745和/或每个突出部6750可以包括锥形物,以促进接合到运行位置。在一示例中,弹簧或夹紧臂6740与突出部6750的接合可以提供感觉反馈,例如,可听见的咔嗒声,以指示校正连接。这种卡扣配合连接可释放地将中间部件6700固定于贮存器底座6050。为了使中间部件6700脱离,弹簧或夹紧臂6740可以被手动地朝向彼此压低(例如,用或不用工具),以弹性地弯曲弹簧或夹紧臂6740及其倒钩端6745,从而防止偏压到解锁位置,即,倒钩端6745移动脱离与突出部6750的接合,以允许中间部件6700从贮存器底座6050移除。
[0476]
一旦建立了连接,由中间部件6700/贮存器底座6050提供的协作保持及对准特征提供了中间部件6700到贮存器底座6050的底座出口 6090的可移除的、不可旋转的连接。同样,一旦连接,中间部件6700 的弹簧或夹紧臂6740被锁定地接合在贮存器底座6050的空腔内,例如,以当水贮存器6100被接收在贮存器底座6050中时,防止中间部件6700的移除。
[0477]
当中间部件6700连接到贮存器底座6050的底座出口6090时,其入口端6710和接触表面6715突出到贮存器底座6050的空腔中,以允许与水贮存器6100的出口管6130(或出口)的出口密封件接合,例如,见图12。类似地,中间部件6700的出口端6720在贮存器底座6050的空腔内延伸和/或从其突出,以允许与空气输送管4170接合,例如,见图9。进一步地,中间部件6700的端口6730例如向上定向,以与安放在rpt装置的处于运行配置的中间部件6700上的pcba相关联的传感器对接。
[0478]
5.8.1卡口式锁定及接触组件
[0479]
如图9至图18所示,锁定及接触组件6900设置于贮存器底座6050 的底座出口6090,以将贮存器底座6050机械和电连接到空气输送管 4170。在图示的示例中,锁定及接触组件6900包括卡口式连接,该卡口式连接被构造和布置为将空气输送管4170定位和固定于贮存器底座 6050,并形成机械、气动和电(功率和控制信号两者)连接。锁定及接触组件6900可以与rpt装置6000分开或与之成一体。
[0480]
如图13和图18所示,锁定及接触组件6900包括基座6910、设置于基座的(电)接触组件6950、和设置于基座6910以围住电接触组件6950的至少一部分的盖6970。
[0481]
锁定及接触组件6900的基座6910包括后壁6912,该后壁6912 例如经由一个或多个紧固件固定于包围底座开口6091的一个或多个壁,以便将基座6910固定在贮存器底座6050的底座出口6090处。如图17 和图18所示,后壁6912包括例如非圆形的开口6915,该开口6915与底座开口6091对准,以允许插入和连接如上所提及的中间部件6700,例如,非圆形开口6915适于接收中间部件6700的非圆形轮廓。在插入过程中,非圆形轮廓辅助使用者定向对准中间部件6700和锁定及接触组件6900。进一步地,如上所提及的,后壁6912在组装过程中为中间部件6700提供止动件,例如,中间部件6700的法兰6770的至少一部分可以邻接后壁6912。
[0482]
锁定及接触组件6900的基座6910包括从后壁6912轴向向外突起的环形侧壁6920。当中间部件6700连接到贮存器底座6050时,中间部件6700的出口端6720和环形侧壁6920协作,以形成用于接收空气输送管4170的通道6780。保持壁6930从环形侧壁6920沿着环形侧壁的周边的一部分径向向外突起,例如沿着环形侧壁的上侧的一部分。在环形侧壁6920中沿着环形侧壁周边的一部分设置有间隙,该间隙形成通向通道6780的凹槽6940(见图9和图18)。凹槽6940邻近保持壁6930,并从保持壁6930逆时针安放。如下所述,凹槽6940和保持壁6930被配置和布置为使得空气输送管4170的底座连接头4600的一部分可以插入凹槽6940,然后顺时针旋转,以移动到保持壁6930之后,从而实现空气输送管与底座之间的锁定接合。
[0483]
额外的保持及对准特征(例如凹槽和/或槽)沿着环形侧壁6920 的周边设置于环形侧壁6920,该环形侧壁6920的周边被构造和布置为在接合过程中与空气输送管4170的底座连接头4600上的相应特征相互作用,如下所述。
[0484]
如图17所示,电接触组件6950由邻近保持壁6930的基座6910 支撑。接触组件6950与贮存器底座6050内的提供电力和电信号的组件(例如,pcba 7600)通信。如所图示的,接触组件6950包括支撑构件6952和多个触头,例如,4个触头。该布置是这样的,当空气输送管4170顺时针旋转以锁定地接合底座时,管子的接触组件移动到与组件6950接触,以允许动力的交换、控制rpt装置(例如pcba 7600)。
[0485]
5.8.2底座连接头
[0486]
如图9至图11所示,空气输送管4170的底座连接头4600被构造为与中间部件6700形成气动连接,并与设置于贮存器底座6050的锁定及接触组件6900形成机械和电连接。
[0487]
在图示的示例中,底座连接头4600包括管状基座部分4640和设置于基座部分4640的锁定及接触组件4660。
[0488]
5.8.3直插式连接和中间部件
[0489]
图23至图36c图示了根据本技术的一种形式的用于将空气输送管 4170连接到贮存器底座6050和水贮存器6100的中间部件9700的替代示例。在该示例中,中间部件9700可移除地联接至贮存器底座6050。中间部件9700被配置为气动地将水贮存器6100连接到空气输送管 4170,使得已经在水贮存器6100中加湿的加压空气流可以经由中间部件9700从水贮存器6100输送到空气输送管4170。同样,在该示例中,中间部件9700被配置为机械地连接到空气输送管4170,从而将空气输送管4170定位并可释放地保持到贮存器底座6050。进一步地,在该示例中,空气输送管4170被构造和布置为与贮存器底座6050形成电连接,贮存器底座6050向加热元件提供电力和控制信号,并将来自与空气输送管4170相关联的转换器的感测数据提供给贮存器底座6050。
[0490]
相应地,与以上关于图9至图22描述的示例(其中底座连接头 4600与中间部件6700气动密封,并与贮存器底座6050机械连接)相反,空气输送管4170的底座连接头4600与图23至图26的示例中的中间部件9700形成气动密封和机械(锁定)连接两种。通过将气动和机械连接组合到一个部件中,可以改善尺寸公差,这可以使底座连接头4600更可靠且更容易制造,并且还可以允许减小底座连接头4600 的大小。
[0491]
中间部件
[0492]
如图23、图25、图26所示,中间部件9700是设置于贮存器6050的底座出口6090的独立部件,以气动地将水贮存器6100连接到空气输送管4170,并机械地将空气输送管4170连接到水贮存器底座6050。在图示的示例中,中间部件9700可移除地联接至贮存器底座 6050,使得中间部件9700可以拆卸,用于清洁、消毒和/或更换,例如用于多患者多用途(mpmu)应用。
[0493]
如图26和图29至图33所示,中间部件9700包括大致管状主体 9705,该大致管状主体9705包括入口端9710和出口端9720。入口端 9710(图33)设置有适于与水贮存器6100对接的入口密封件9715,以及出口端9720,其适于与空气输送管4170对接。管状主体9705还包括保持及对准特征,该保持及对准特征被构造和布置为将中间部件 9700与贮存器底座6050对准,并提供与贮存器底座6050的可移除的、不可旋转的连接。
[0494]
另外,管状主体9705包括开口形式的端口9730,例如,其用于与传感器或转换器连通。该传感器或转换器测量通过端口9730传播的声音,并且可以是任何类型的压力传感器的麦克风(包括电阻式、电容式、压电式、光学式或基于其他技术的类型)。端口9730设置有围绕开口的端口密封件9735,以在中间部件9700与底架开口7380(其与传感器相关联)(见图32-36c)之间提供密封界面。进一步地,中间部件9700包括保持特征,该保持特征被构造和布置为提供与空气输送管4170的底座连接头4600的锁定但可移除的连接。
[0495]
在图示的示例中(例如,见图33),管状主体9705(包括入口端 9710、出口端9720以及保持及对准特征)包括由相对刚性的材料(例如,热塑性聚合物(例如,pc、abs))构成的第一部分或基础模具,并且入口密封件9715和端口密封件9735包括由相对柔软的材料(例如,热塑性弹性体(tpe)或硅树脂)构成的第二部分或包覆成型件,该第二部分或包覆成型件设置于第一部分(例如,通过包覆成型)。
[0496]
在图示的示例中,入口密封件9715与出口端9720成一定角度布置,例如,入口密封件9715处的开口的轴相对于出口端9720处的开口的轴成约90
°
布置(见图32)。然而,应该认识到的是,也可以是其它合适的角度,例如,入口密封件9715的轴相对于出口端9720的轴成约45
°
布置。
[0497]
当水贮存器6100联接至贮存器底座6050时,中间部件9700的入口密封件9715被构造和布置为抵靠接触表面沿着水贮存器6100的出口管6130(或出口)的出口端接合并提供面密封。这种接合密封了出口流动路径,该出口流动路径允许加湿的空气流出水贮存器6100并进入中间部件9700,以输送到空气输送管4170。如所图示的,入口密封件9715可以包括可弹性压缩的波纹管式布置,以在中间部件9700与水贮存器6100之间提供一定程度的分离。当使用出口盖子消音器4124 (图5b)代替水贮存器时,在中间部件9700的入口密封件9715与出口盖子消音器的开口之间有类似的密封接合。
[0498]
在替代实施例中,水贮存器6100的出口管6130(或出口)与中间部件9700之间的密
封件可以为出口管6130的整体部分,或者可以为独立于出口管6130或中间部件9700的密封部分。
[0499]
出口端9720可以包括iso锥形物,例如22mm的外径iso锥形物,用于联接至空气输送导管4170。
[0500]
关于将中间部件9700对准并保持到贮存器底座6050的保持及对准特征,中间部件9700包括弹性夹紧臂9740,即,悬臂式弹簧臂。弹簧或夹紧臂9740可以包括倒钩端或突片9745,该倒钩端或突片9745 被构造为提供与设置在贮存器底座6050的空腔内的锁定构件(例如,横杆9750)的卡扣配合连接(见图27和36c)。中间部件9700还包括导向轨9760(沿中间部件9700的下侧)和导向挡边9761(沿着中间部件9700的前向上侧),导向挡边9761被构造和布置为通过与延伸到贮存器底座6050的空腔中的相应导向槽9755接合,来辅助中间部件9700正确对准和插入贮存器底座6050(见图27、图28b和图30)。
[0501]
进一步地,中间部件9700包括法兰9770,该法兰9770布置在入口端9710与出口端9720之间,以通过邻接设置于贮存器底座6050的壁,来辅助将中间部件9700定位在贮存器底座6050中,例如,法兰在插入过程中用作止动件,如图28e所示。如图28d、图28e和图33 所示,一个或多个缓冲器9775(例如,由热塑性弹性体(tpe)或硅树脂构成)设置于法兰9770,以在插入过程中使与贮存器底座开口的邻接变柔软,并在使用中吸收振动。除了使中间部件9700的振动最小化之外,凸块的柔性确保了一旦它们被压低,就会产生向后推动倒钩突片9745的合成弹簧力,并且确保了突片与横杆9750恒定锁定接合。这使倒钩突片9745与横杆9750之间的锁定接合中的任何振动以及脱离的可能性最小化。在图示的示例中,第一缓冲器9775设置于中间部件9700的上侧,并且第二缓冲器9775设置于中间部件9700的下侧(见图28d)。在一示例中,缓冲器9775可以连同入口密封件9715和端口密封件9735一起包覆成型于管状主体9705(见图33)。缓冲器9775 可以是这样一个原因的一部分,即在中间部件9700插入贮存器底座 6050中的管状开口时,在插入的后期,在缓冲器与贮存器底座开口的相应部分相接合的位置处,中间部件会遇到增加的阻力。
[0502]
关于将空气输送管4170的底座连接头4600保持到中间部件9700 的保持特征,中间部件9700包括沿着出口端9720从法兰9770向外突起的部分环形侧壁9790(见图30)。如图30所图示的,出口端9720 和部分环形侧壁9790协作,以形成用于接收空气输送管4170的环形通道9780。部分环形侧壁9790的两个相对侧中的每一个都包括孔或凹槽9792(图30),该孔或凹槽9792适于在接合过程中接收设置于空气输送管4170的底座连接头4600的相应保持凸块4644(图26)。在图示的示例中,间隙设置在部分环形侧壁9790中(沿着其上侧),以容纳和促进空气输送管4170的底座连接头4600的电连接。
[0503]
同样,中间部件9700包括下突片9795(图30),该下突片9795 沿着部分环形侧壁9790的周边的一部分(沿着其下侧)从部分环形侧壁9790向外和向下突起。下突片9795可以用作指状物或推动突片,以促进将中间部件9700插入贮存器底座6050或从贮存器底座6050中取出中间部件9700。另外,下突片9795可以被配置和布置为覆盖或隐藏一个或多个紧固件(例如,螺钉)或集成rpt装置及湿化器6000 的外护罩与底架部件之间的边缘(见图23和图26)。
[0504]
当中间部件9700插入到贮存器底座6050的底座开口6091时,中间部件9700被定向成将其导向轨9760和导向挡边9761与相应的导向槽9755相接合,该导向槽9755将中间部件
9700正确地对准和引导到运行位置(见图26)。同样,底座开口6091和中间部件9700的部分环形侧壁9790包括非圆形轮廓,以促进在插入过程中中间部件9700 的正确定向。当中间部件9700到达运行位置时,弹簧或夹紧臂9740 的倒钩端或突片9745被配置和布置为接合在横杆9750之下和/或之后,例如,见图25、图28f和图28g。倒钩端9745和/或横杆9750可以包括锥形物,以促进接合到运行位置,例如,见图28f。在一示例中,弹簧或夹紧臂9740与横杆9750的接合(例如,见图25、图28f和图28g) 可以提供感觉反馈,例如,可听见的咔嗒声,以指示校正连接。这种卡扣配合连接可释放地将中间部件9700固定于贮存器底座6050。如图 28c和图28f所示,倒钩端9745的一个侧表面9746可以成一定角度设置于倒钩端9745的相对侧表面。当底架(例如,横杆9750)抵靠倒钩端9745的成角度的表面9746时,在插入中间部件9700的过程中,倒钩端9745可能被迫弯曲,直到底架的接合侧表面9746的部分延伸经过侧表面9746。为了使中间部件9700脱离,弹簧或夹紧臂9740可以被手动地朝向贮存器底座6050的后部压低(例如,用或不用工具)。这种压力可以将弹簧或夹紧臂9740及其倒钩端9745弹性弯曲到解锁位置,即,倒钩端9745移动脱离与横杆9750的接合,以允许中间部件9700从贮存器底座6050移除。在一些示例中,倒钩端9745可以包括槽9747(例如,见图28g和图29),以允许工具(例如平头螺丝刀) 与倒钩端9745抓握,用于将倒钩端9745从贮存器底座6050脱离。
[0505]
如图28c和图28g所示,9740夹紧臂可以相对于管状主体9705 的中心轴成一定角度设置。夹紧臂9740可以是成角度的,使得入口端 9710处的开口的轴与夹紧臂9740之间的角度小于90
°
。与相对于管状主体9705的中心轴不成角度的夹紧臂9740相比,成角度的夹紧臂 9740可以提供增加的保持力。
[0506]
一旦中间部件9700插入并锁定在贮存器底座6050的底座开口 6091中,由中间部件9700/贮存器底座6050提供的协作保持及对准特征提供了中间部件9700到贮存器底座6050的底座出口6090的可移除的、不可旋转的连接。同样,一旦连接,中间部件9700的弹簧或夹紧臂9740就被锁定地接合在贮存器底座6050的空腔内,例如,以当水贮存器6100被接收在贮存器底座6050中时,防止中间部件9700的移除。
[0507]
当中间部件9700连接到贮存器底座6050的底座出口6090时,其入口密封件9715突出到贮存器底座6050的空腔中,以允许与水贮存器6100的出口管6130(或出口)接合(见图25)。类似地,出口端 9720连同部分环形侧壁9790及其孔9792在贮存器底座6050的空腔内延伸和/或突出,以允许与空气输送管4170接合,例如,见图23和图 28a。进一步地,端口9730及其端口密封件9735被定向成与传感器相关联的底架开口7380对接,例如,如图34b和图35b所示的向上地。
[0508]
5.8.4声音在中间部件中的传播
[0509]
如上所述,中间部件9700促进在空气回路4170的导管与rpt装置(例如,贮存器底座6050和/或水贮存器6100)之间的连接。根据本技术的一方面的中间部件9700包括端口9730(例如声音端口),以促进声音从中间部件9700传播到安放在rpt装置中的传感器4270(例如麦克风)。传感器4270从外部附接到中间部件9700。当从外部附接时,传感器4270可以安放在中间部件9700和/或端口9730的外侧,或者在中间部件9700和/或端口9730的内侧(例如,完全或部分插入)。因此,可以到达中间部件9700的来自患者接口300、rpt装置400、湿化器500和/或空气回路4170中的任何部分的声音可以传至安放在 rpt装置中的传感器
4270(例如,麦克风)。如将在下文更详细描述的,可以分析所感测的声音,以确定声音来源的相应部分(例如空气回路4170)的特征和/或相应部分内的特征。中间部件9700的结构和尺寸被配置为改善声音在中间部件9700内侧和到端口9730的传播。在此已经描述了中间体的两种变体(6700和9700)。例如,图19至图22描绘了中间部件6700,其包括经由副体(例如,锁定及接触组件 6900)的电连接件,以及非圆形膜。然而,对于声音传播设计意图,中间体的6700和9700变体两者都以相同的方式表现。
[0510]
如图28c、图29和图31至图36c所示,中间部件9700包括端口 9730,以促进在气流路径中传播的一部分声音的一部分传播到传感器 4270。具体地,端口9730允许气流路径中的一部分声音由中间部件9700 通过端口9730,经由底架中的相应底架开口7380传至传感器4270(例如,位于底架内侧的麦克风,见图37)。底架开口7380可以设置在底架的一部分中,从而形成接收加湿水桶的水贮存器底座(例如,贮存器底座6050)。相应地,底架开口7380可以对应于水贮存器底座中的开口。在其他示例中,底架开口7380可以设置在底架的另一部分中。例如,底架开口7380可以设置在底架7300的与水贮存器底座不同的部件的一部分中。如图32和图33所示,端口9730包括中间部件9700 的壁中的开口并位于靠近入口端9710处。与端口9730相关联的轴(假定该轴大致横向于端口开口在其中延伸的平面)可以相对于出口端 9720处的开口的轴成大约90
°
布置和/或相对于入口端9710处的开口的轴成大约90
°
布置(见图26、图28c和图36c)。
[0511]
端口的大小可以基于作为检测目标的声音信号的参数来选择。这些声音信号可以是由rpt系统(包括rpt装置、湿化器、空气回路和患者接口)中的任何部件直接产生的声音信号,和/或在一个位置处产生的声音信号,但是然后传播到特定的目标部件并被其反射回来。声音从中间部件9700并通过端口9730之后到达的空腔的大小也很重要。在一个示例中,如图37示意性所示,这种空腔可以由中间部件9700 的壁和支撑传感器4270的pcba 7600形成。较大的端口9730可以引入空间平均并使空间分辨率减小,但可以允许更多声音信号到达传感器并提高信号噪声比。在信号噪声比超过足够的情况下,较小的端口尺寸可能是优选的,以便保留较高分辨率的信号信息,诸如与由较小几何特征反射的声音相关的信息。较大的端口9730和由该端口形成的较大的相邻空腔可能在中间部件内的流动路径的横截面积或声阻抗中造成不连续性,并干扰信号传播。降低外侧噪声(例如,来自支撑传感器4270的pcba 7600的振动的噪声)可以允许端口的孔径减小,并提供更好的空间分辨率和减小的信号干扰。
[0512]
根据本技术的一种形式,端口大小可以被配置为足够大,以允许适当的目标信号水平到达安放在中间部件9700外侧的传感器4270,但是不能太大,以至于不能将通过中间部件9700的信号路径的空间分辨率和/或波导特性妥协到不可接受的水平。根据本技术的一种形式,端口9730可以具有在0.75mm2和180mm2之间的横截面。例如,在本技术的一种形式中,端口9730可以是圆的并且可以具有范围在1mm至 15mm的直径。
[0513]
根据图34和图35所示的本技术的一种形式,端口9730被薄的硅树脂膜9732覆盖。膜9732意图使传感器在气流外,同时仍将声音沿空气路径(空气流)传播到传感器。这就是为什么膜可以是透声的,但优选不渗透液体和/或气体。由于这种布置,当我们移除和净化中间部件9700(或在空气路径中或流体连接到空气路径的任何其他部件,但是被布置成使得声音能够传递到位于空气路径外的屏蔽传感器)时,传感器本身不需要被移除和清洁,因
为它不在空气路径中并且没有暴露于污染物。在一些示例中,膜9732具有尽可能大的直径(或其他横截面尺寸),并且尽可能的薄。这种尺寸增加了穿过膜转移的目标信号(直接产生的或反射的噪声)的量。在一些示例中,膜9732可以具有在0.05mm至3mm之间、或0.1mm至1mm之间、或0.1mm至 0.3mm之间的厚度,以及范围在1mm至15mm的直径。在一些示例中,膜9732可以具有在0.1mm至0.2mm之间的厚度,以及范围在1mm 至15mm的直径。在一些示例中,膜9732可以具有约0.2mm的厚度,以及范围在1mm至15mm的直径,以及在一个示例中,直径约为8mm。示例尺寸为膜提供了足够好地穿过膜9732传递声音的性能,而同时限制了声音信号穿过膜所附接到的中间部件9700的壁的泄漏。在一些示例中,膜可以设置成使得其与中间部件9700的内表面是平的。膜9732 可以与端口密封件9735形成为一个整体部件,或者可以与端口密封件 9735分开设置。膜9732可以与端口密封件9735机械接触或不机械接触。在图34和图35所示的实施例中,膜9732与端口密封件9735形成为一个整体部件。
[0514]
根据本技术的一种形式,端口9730可以没有膜9732和/或端口密封件9737。如上所说明的,具有膜9732的一个好处在于,它防止来自中间部件的空气进入底架,从而将pcba上的电子部件与空气流气体分开。这防止了加湿的和/或污染的空气进入麦克风室,并保护电子器件免受湿气或污染空气(例如,包含人体体液,诸如如粘液)的影响。从治疗效益的角度来看,期望当提供pap治疗时控制泄漏。膜的存在减少了从系统的不经意的泄漏。也可以是端口9730没有膜9732的布置。在这种情况下,可以在底架内侧引入高压泄放,以防止空气从中间部件9700进入底架。可替代地,可以将封装的传感器引入空气路径中。在这种情况下,可以封装传感器(如硅树脂、橡胶或另一种材料制成的薄膜,这种材料可以传递声音振动,同时还可以去污(例如,它是可以清洗的))。这种传感器可以制成中间部件9700的固定部分,或者可以是在空气路径中或者流体连接到空气路径并且传感器可以附接到其的任何其他部件。因为传感器是封装的,所以可以用相应的中间部件将其移除和清洁。在这种情况下,传感器的电终端必须在拆卸/ 组装过程的过程中断开和重新连接。
[0515]
然而,除了限制空气移动之外,膜9732的使用还具有其他好处,诸如影响控制并防止损坏pcba 7600的电路。当使用膜9732时,有益的是,提供尽可能柔软和轻的膜,以便传递大范围的信号频率。根据本技术的一种形式,优选的质量和刚度可以由膜9732的密度和尺寸以及穿过膜的压力梯度来确定。根据本技术的一种形式,对于直径为5mm,厚度在范围0.1mm和0.4mm之间,或大约0.3mm的端口9730,可以在足够厚以避免结构故障与足够薄以允许适当的声音传递之间提供合理的妥协。
[0516]
图34a至图35d示出了根据本技术的各种示例的设置有端口密封件9735的端口9730的示例。端口密封件9735提供周边密封形成件(脊或唇),其可以是膜9732的一部分或者可以与膜9732分开。周边密封形成件可以包括径向密封件,该径向密封件被配置为接合(例如作为面密封)中间部件9700上方和围绕底架开口7380的底架表面,并抵靠该底架表面弹性变形。
[0517]
端口密封件9735可以环绕端口9730并突出端口9730以外。如图 34a至35d所示,端口密封件9735从端口9730突出,并且突出于中间部件9700的外表面上方。在使用中,当中间部件9700插入运行位置时,端口9730可以与底架开口7380对准,从而为声音信号(来自中间部件9700,通过端口9730和膜9732,并通过底架开口7380)提供密封的路径,传感器4270定位在底架开口7380的相对侧上。
[0518]
中间部件9700中的端口9730的中心轴可以与底架开口7380的第一侧上的底架开口7380的中心轴大致对齐(见图35a-36c),并且传感器4270可以设置在底架开口7380的第二侧上。传感器4270可以与端口9730和/或底架开口7380的中心轴大致对齐。端口9730的轴、底架开口7380的轴和传感器4270可以大致对齐,使得在运行配置中,它们中的任何两个之间的距离小于:5mm,优选地4mm,甚至更优选地3mm,进一步优选地2mm,最优选地小于1mm。
[0519]
如上文已经描述的,在组装中间部件9700时(通过将中间部件 9700插入贮存器底座6050的底座开口6091中),使端口密封件9735 与底架开口7380的周边接触。因为端口密封件9735接触中间部件9700 和底架开口7380两者的周边,所以当组装中间部件9700时,端口密封件9735将端口9730和底架开口7380两者的周边密封。这使经由薄膜9732转移到中间部件壁与底架壁之间的空间中的声音信号的横向逃逸最小化。除了防止声音从密封声音通路侧向泄漏到中间部件9700壁与底架的壁之间的空间9743中,端口密封件9735的周边唇还防止外部噪声进入密封信号通路。
[0520]
图34a至图34d示出了根据本技术的一示例的端口密封件9735 的一示例,其通过使用脊来提供抵靠底架壁的压缩型密封。图34b和图34c示出了没有压缩的脊的一示例的截面图。图34d示出了被底架 7300的壁压缩的脊。提供压缩密封的端口密封件9735包括由相对柔软的材料(例如,热塑性弹性体(tpe)或硅树脂)构成的包覆成型件,该包覆成型件设置于中间部件9700(例如,通过包覆成型)。端口密封件9735可以从膜9732延伸和/或包括膜9732,膜9732设置在中间部件9700的内表面处或靠近其设置,沿着端口9730的内壁,并且从端口9730突出于中间部件9700的外表面9707上方(例如,靠近端口 9730的边缘)。端口密封件9735的突出于中间部件9700的外表面上方的部分可以包括脊密封件9737,脊密封件9737在使用过程中在端口密封件9735与底架之间提供球形密封接触。在一些示例中,一个或多个额外的脊密封件(例如,同心安放)围绕脊密封件9737设置。
[0521]
中间部件9700的外表面上方的脊密封件9737的横截面可以是圆的,并且在它与中间部件的壁的上表面或者中间部件的壁的上表面的延伸部分合并之前,从端口9730的周边沿外向方向延伸预定距离d4 (见图34c)。d4可以在1.2mm和2.8mm之间、1.8mm和2.2mm 之间,或大约2mm。脊密封件9737的侧面可以是在任一侧面远离圆的顶部的斜坡。朝向端口9730中心的斜坡可以大于远离端口9730引导的斜坡。脊密封件9737的从端口9730的周边沿外向方向延伸的部分可以相对于中间部件9700的外表面成10-35度的角度a1设置,在一些示例中成20-25度的角度,在一些示例中成22度的角度。沿外向方向延伸的脊密封件9737的部分可以成一定角度向外延伸,并且终止于中间部件9700的上表面,该上表面可以对应于靠近端口9730的边缘的表面或者中间部件9700的另一外表面。
[0522]
在一些示例中,端口密封件9735可以包括一个或多个连接部分 9739(见图34c),该连接部分9739邻近脊密封件9737并且沿一个或多个方向延伸和/或连接到其他特征(例如,缓冲器9775和/或入口密封件9715,见图34a)。一个或多个连接部分9739的顶面可以与中间部件9700的外表面的部分等高。在一个示例中,连接部分9739可以围绕脊密封件9737的整个周边延伸。脊密封件9737可以在连接部分 9739的表面上方向上延伸预定距离d1(见图34c)。预定距离d1可以在0.4mm至0.8mm之间,或大约0.6mm。
[0523]
在使用中,中间部件9700的外表面上方的脊密封件9737的一部分可以在其触底之前以预定距离d2压靠底架。在一些示例中,中间部件9700的外表面9707上方(例如,靠近端
口9730的边缘)的端口密封件9735的材料可以被配置为压缩其高度的大约20%-40%,并且在一些示例中压缩其高度的大约30%。在一些示例中,端口密封件9735可从中间部件9700的外表面9707向上延伸(例如,靠近端口9730的边缘)预定距离d3(见图34c),该距离d3可以在1mm和1.5mm之间、1.2mm和1.3mm之间,或大约1.24mm。在一些示例中,标称密封件干涉(在压缩下密封件变形的量度可以相当于d2)可以在0.09mm 和0.59mm之间、0.15mm和0.5mm之间,或大约0.34mm。
[0524]
脊密封件9737的压缩型和球形密封接触可以在组装过程中当中间部件9700到达运行位置时,使中间部件9700卡扣到位和/或防止中间部件9700在没有明显外力的情况下拆卸。在一些示例中,端口密封件9735的压缩可以将中间部件9700保持到位,即使当倒钩端9745移动脱离与横杆9750的接合时,以允许当中间部件9700从贮存器底座6050移除时容易操作。
[0525]
图35a至图35d示出了根据本技术的另一示例的提供唇密封的端口密封件9735的示例。图35b和图35c示出了没有压缩(例如,没有压靠在底架7300上)的唇密封件的示例,并且图34d示出了被底架 7300压缩的唇密封件。提供唇密封的端口密封件9735可以包括由相对柔软的材料(例如,热塑性弹性体(tpe)或硅树脂)构成的包覆成型件,该包覆成型件设置于中间部件9700(例如,通过包覆成型)。如图35a至35d所示,端口密封件9735可以从膜9732延伸和/或包括膜 9732,该膜9732设置在中间部件9700的内表面处或靠近其设置,沿着端口9730的内壁以衬在端口9730的内表面,并且从端口9730突出于中间部件9700的外表面9707上方(例如,靠近端口9730的边缘)。端口密封件9735的突出于中间部件9700的外表面上方的部分可以包括唇密封件9742,该唇密封件9742在使用过程中在端口密封件9735 与底架之间提供球形密封接触。在一些示例中,一个或多个额外的唇密封件可以围绕唇密封件9742设置。
[0526]
中间部件9700的外表面上方的唇密封件9742的横截面可以与端口9730的内表面对齐,和/或提供围绕端口9730的周边朝向端口9730 的中心同心地延伸的唇。在一些示例中,唇可以相对于中间部件9700 的上外表面成预定角度a2(见图35c)设置。角度a2可以在10-35 度之间,15-25度之间和/或约为20度。唇密封件9742可以从中间部件 9700的下面的表面向上延伸预定距离d5(见图35c)。距离d5可以大约为1.3mm至1.7mm、1.4mm至1.6mm,或为1.56mm。唇密封件9742的厚度t1(见图35c)大约在0.2mm至0.6mm之间、0.35-0.45 mm之间,或为0.4mm。在一些示例中,唇密封件9742的在端口9730 上方延伸的一端可以是圆的。可以选择唇密封件9742的尺寸和/或唇密封件9742设置的角度,以在使用过程中改善声学密封和/或减少唇密封件的膨胀。在一些示例中,唇可以直接向上延伸,或者与端口9730的中心成一定角度延伸。
[0527]
唇密封件9742可以从端口9730的边缘成预定角度a2延伸预定距离d8(见图35c)。预定距离d8可以由唇密封件9742的上表面与中间部件9700的表面或与中间部件9700的表面的延伸部分合并的边缘来限制。距离d8可以在0.1mm至3.5mm之间的范围内,0.15mm至 3mm之间的范围内,或大约2mm。
[0528]
在一些示例中,端口密封件9735可以包括一个或多个连接部分 9739,该连接部分9739邻近唇密封件9742并且沿一个或多个方向延伸和/或连接到其他特征(例如,缓冲器9775和/或入口密封件9715,见图35a)。一个或多个连接部分9739的顶面可以与中间部件
9700 的外表面的部分等高。在一个示例中,连接部分可以围绕唇密封件9742 的整个圆形周边延伸。唇密封件9742可以从中间部件9700的上表面向上延伸预定距离d6(见图35c),该距离d6在连接部分9739的表面上方0.4mm至0.8mm之间或大约0.66mm。
[0529]
在使用中,唇密封件9742的在中间部件9700的外表面上方的一部分可以朝向端口9730并抵靠底架压缩和/或偏斜。在一些示例中,唇密封件9742在其触底之前可以在预定距离d7(见图35c)之间偏斜,该预定距离d7在0.1mm和0.6mm之间、或者在0.15mm和0.41mm 之间。在一些示例中,唇密封件9742的标称密封干涉可以大约为0.41 mm,最小密封干涉可以大约为0.15mm,和/或最大密封干涉可以大约为0.66mm。
[0530]
在组装过程中当中间部件9700到达运行位置时,唇密封件9742 可以辅助将中间部件9700保持到位和/或防止中间部件9700在没有明显外力的情况下拆卸。
[0531]
上面已经公开了两种类型的密封形成件。在用脊密封件9737提供压缩密封的端口密封件9735中(见图34a至图34d),突出于中间部件9700表面上方的密封形成件的横截面比唇密封件9742更坚固和更像球状。由于脊密封件9737的质量,当中间部件9700插入底架内侧时,脊密封9737可以更容易地压缩,并且可以提供更小的摩擦力。在替代的唇密封件的示例中(见图34a至图34d),唇密封件9742的突出于中间部件9700表面上方的部分是薄唇,当被压缩时,该薄唇可以展示出有限的弯曲和柔性。当中间部件9700插入底架7300内侧时,唇密封件9742可以在中间部件9700与包围的底架壁之间产生明显的摩擦力。
[0532]
如上所述,脊密封件9737或唇密封件9742从中间部件9700与底架7300之间的剩余空间9743提供密封形成后的信号路径的声音隔离。当中间部件9700定位在底架7300中以供使用时,底架7300与中间部件9700的表面或连接部分9739之间的距离限定空间9743(见图35c),该距离可以在0.15mm和0.4mm之间、0.2mm和0.3mm之间、或为 0.25mm。
[0533]
在本技术的一些示例中,端口密封件9735可以设置在底架7300 的表面上。在该示例中,端口密封件9735可以设置在底架7300上,而非中间部件9700上。端口密封件9735可以设置成使得其设置在底架开口7380中。底架开口7380中的端口密封件9735可以包括周边密封形成件(脊或唇),该周边密封形成件被配置为接合(例如,作为面密封)底架开口7380下方且围绕端口9730的中间部件的表面,并且抵靠该表面弹性变形。
[0534]
中间部件9700内侧的特征影响了声波在中间部件9700内侧以及到端口9730的传播(例如,反射、折射和/或衰减)。本技术的示例在中间部件9700内侧提供了特征,这些特征有助于将有用的反射信号从空气回路4170(例如,管和/或面罩)经由端口9730携带到传感器4270 的特征。
[0535]
如图所示,中间部件9700的入口端与出口端之间的空气路径是非线性的,并且包括至少一个圈。根据本技术的一种形式,为了在中间部件9700中提供合适的传播,中间部件9700内侧的角是弯曲的。在一些示例中,最靠近端口的至少一个圈可以是弯曲的。在本技术的一个示例中,中间部件9700的内侧的所有角都是弯曲的。如果角是尖的 (例如,90
°
角),声音信号的水平和质量可能会劣化,即使由于尖的角产生的湍流而导致整体声音水平更高。设置具有曲率的角(例如,外角9714,尤其是内角9712)可以提高声音信号的质量。
[0536]
图28c示出了根据本技术的一示例的中间部件9700的横截面。如图28c所示,形成在中间部件9700的主体与入口密封件9715之间的外角9714和/或内角9712是弯曲的。在一些示例中,入口端9710处的入口密封件9715(见图32)可以相对于出口端9720和/或中间部
件9700 的主体成一定角度布置。该角度可以大约90
°
或大于90
°
。
[0537]
在一些示例中,由内角9712形成的曲率可以具有0.2mm-6.5mm、 0.3mm-4mm、0.4mm-3mm(诸如0.4mm或2mm)的半径,然而该范围也可以是1.5-6.5mm、2.5-5mm等。
[0538]
弯曲角(例如,内角9712)可以设置为入口密封件9715的一个或多个密封波纹管的一部分。如图28c所示,入口密封件9715的密封波纹管可以包括内表面9712b和外表面9712c。内表面9712b的曲率可以确定声音在中间部件9700内侧传播的方式。外表面9712c可以包括大约0.2-0.6mm或为0.4mm的半径。内表面9712b可以包括大约 1.5-6.5mm、2.5-5mm、或为2mm的半径。在一些示例中,外表面半径可以为0.4mm,并且内表面半径可以为2mm。在本技术的一些示例中,外表面半径可以小于内表面半径的一半。在一些示例中,中间部件9700中的密封波纹管的相对侧之间的跨度9712d可以等于或小于内表面半径的两倍。
[0539]
虽然上面参考中间部件9700描述了端口9730和端口密封件9735,但是端口9730的一个或多个特征和端口密封件9735可以设置在中间部件6700中(例如,代替图22所示的端口6730)、空气回路4170中的导管的一部分中或底座连接头4600中。
[0540]
5.8.5减轻中间部件密封插入的摩擦的特征
[0541]
rpt装置6000的中间部件9700和底座出口6090被布置为使得在中间部件9700插入底座出口6090的路径的大部分长度过程中,路径略微宽于中间部件9700的直径,并且端口密封件9735(例如,端口密封件9735的硅树脂脊或唇)不与路径壁相互作用。这确保了中间部件 9700相对无摩擦地插入底座出口6090。在本技术的一些示例中,底架路径底部的提升和/或中间部件下部分的向下延伸部分可以被配置为向上推动中间部件9700(参考中间部件9700的初始移动方向)。在该示例中,这在中间部件9700被锁定在其运行位置(例如,经由夹紧臂9740) 之前不久完成。因为向上的压力,端口密封件9735(例如,硅树脂周边唇)移动到与底架接合,并将底架开口7380的周边密封。
[0542]
在一些示例中,仅在路径的最末端处,在中间部件9700完全被锁定到其运行位置之前不久,路径底部的提升可以将中间部件9700向上推动并进入其运行配置。在该示例中,由于端口密封件9735、中间部件9700和底架开口7380的特定结构,使用者将中间部件9700插入底架开口7380时,在插入路径的最末端处遇到增加的阻力。可能在中间部件9700(中间部件的一个或多个特征,诸如缓冲器)遇到较小直径的开口的位置处遇到阻力,这产生了端口密封件9735的脊或唇与底架壁之间的额外的摩擦。
[0543]
图36a至图36c示出了根据本技术的一示例的当中间部件9700 插入到接收贮存器底座6050(例如,贮存器底座6050的底座出口6090) 时的事件的特定顺序。如图所示,在具体图示的示例中,中间部件和接收开口两者都是大致管状形状。中间部件9700还包括导向轨9760 (图36b)(沿中间部件9700的下侧)和导向挡边9761(图36b)(沿着中间部件9700的前向上侧),导向挡边9761被构造和布置为通过与延伸到贮存器底座6050的空腔中的相应导向槽9755接合,来辅助中间部件9700正确对准和插入贮存器底座6050。当中间部件9700插入贮存器底座6050时,导向轨9760和/或导向挡边9761沿着底架导向槽9755(如图28b、28d和28e所示)。如图36a所示,并且如上文中所提及的,当中间部件9700最初插入贮存器底座6050时,在端口密封件9735(例如,端口密封件9735的硅树脂脊或唇)与底架之间提供空隙。端口密封件9735与底架7300之间的空隙减小了中间部件9700 的组装力和/或减小了和/或防止端口密封件9735过度变形。
[0544]
图36b示出了在一个或多个(在该情况下为3个)接合形成点l1、 l2和l3(见图36c的接合形成点l1-l3)处,中间部件9700与接收贮存器底座6050的相应开口之间的接合的开始。这些点中的每一个都标记了这样的位置,即在中间部件9700朝向与底座开口完全接合的渐进移动过程中,中间部件9700的结构特征(例如导向轨、挡边或缓冲器)接合底座开口的相应接合特征(例如,臂9740的下边缘接合l1 处的倾斜脊9757,导向轨9760的边缘接合l2处的导向槽9755的升高段等)。这些点中的接合可以是同时的或顺序的,并且其目的在于将中间部件9700引导到其完全接合的配置中,其中倒钩端9745被牢固地锁定到底架/底座开口上的相应法兰,并且其中端口密封件9735已经可靠地将端口9730密封。结果是,根据本技术的一示例,端口密封件 9735(例如,端口密封件9735的硅树脂脊或唇)也开始接合底架7300。如图36a和35b所示,在端口9730的边缘经过中心轴和/或底架开口 7380的边缘之后,端口密封件9735可以开始接合底架7300。中间部件9700的卡扣搭配连接(例如,由倒钩端或突片9745、弹簧或夹紧臂 9740提供)可以在卡扣搭配连接形成之前沿着设置在底架下部分的倾斜脊9757向上滑动。当卡扣搭配连接被设置在三个接合形成点l1至 l3中的一个或多个处的提升路径引导而向上滑动时,端口密封件9735 开始接合靠近底架开口7380的底架。在向上滑动倾斜脊9757之后,卡扣搭配连接可以在完全接合卡扣之前进一步行进预定距离(例如,1 mm)。倾斜脊9757可以成一定角度设置,该角度在15和25度之间、 18和22度之间,或为20度。在一个示例中,倾斜脊9757可以成大约 20度的角度并且跨度为预定距离d9设置,该距离d9在1.5和2.5之间、1.8和2.2mm之间、或为2mm。
[0545]
图36c示出了根据本技术的一示例的在完全组装位置接合底架的端口密封件9735(例如,端口密封件9735的硅树脂脊或唇)。中间部件9700中和/或底架开口中的一个或多个特征可以被构造为通过将中间部件9700向上推向底架开口7380和/或通过确保在完全组装的配置中的可靠接合和声学密封来实现这两个部件的接合。例如,端口密封件9735的压缩接合可以通过以下各项中的一项或多项来实现和/或控制:臂9740的下边缘和/或悬臂卡扣配合位置(l1)中的倾斜脊9757 中的一者或两者中的台阶,导向轨9760的边缘接合导向槽9755(l2) 的升高段(以提升中间部件并最小化摇摆移动),和/或下突片9795上的向外/向下延伸的突片或法兰相互作用,和/或底架的相应段上的向内 (向上)延伸的突片或法兰在位置(l3)处接合下突片9795。l1、l2 和l3位置中的各个元件的接合可以基本上同时或顺序发生。只要达成有效的最终接合,没有特别的顺序为优选的。
[0546]
除了或代替先前描述的任何缓冲器9775(其也可以被认为是接合形成件或接合特征),在位置l1至l3中的一个或多个上述接合可以在插入的后期形成增加的阻力的部分。然而,这些接合形成件可以是引导中间部件与水贮存器的开口密封接合并进入其最终运行配置的布置的部分。
[0547]
如图36c所示,底架位置(l2)的导向轨9760的加宽段的位置可以对应于端口9730的边缘、端口密封件9735的边缘和/或端口密封件9735在垂直方向上的脊或唇缘的位置。导向轨9760与相对的相应接合形成件在点l2处的接合在垂直方向上朝向底架开口7380提升中间部件,以在端口密封件9735与底架的围绕底架开口的表面之间提供密封。在其他示例中,接合形成点l2的位置可以设置在更靠近底架开口处,并且对应于底架开口7380的中心轴(图36c中未示出)。
[0548]
当在中间部件9700与贮存器底座6050之间,与端口密封件所提供的支撑接合相组
合时,在上述接合形成点的至少一个中的支撑接合的组合被配置为使得在没有明显外力的情况下,阻止中间部件9700的变位,并因而阻止端口密封布置的破坏。虽然单个接合点(如图36c 中的l1或l2)足以实现稳定的接合,但是由于在使用过程中(通过使用者拉动管子)可能会向中间部件施加较大的力,所以使用多于一个的接合形成点(诸如图36c中所示的所有三个点l1、l2和l3)对于增加布置的机械稳定性是有利的。包括多个接合点(在该情况下,这些结合点中的至少一些使中间部件升高或其的至少一部分升高)可以有助于确保在9730处的牢固和一致的密封,即使在治疗过程中患者可能通过拉动管子对这种布置施加压力,并因此对中间部件9700施加压力。另外地,中间部件的坚固支撑使得附接的管到中间部件的附接和移除变得更容易。
[0549]
由于密封配置、中间部件9700和接收开口的特定结构,使用者将中间部件9700插入底架开口时,仅在插入路径的最末端处遇到一些阻力。这是在插入路径末端的位置,在该位置,中间部件9700遇到较小直径的开口(受提升接合点l1至l3的影响)。最小化的摩擦使得中间部件更方便地插入贮存器底座6050的底座出口6090。此外,所描述的引导插入和柔性端口密封件的过程为插入和密封提供了相对高的机械公差和对膜9732和/或端口密封件9735的低的损坏可能性。
[0550]
在图36a至图36c中,点l1至l3处的接合(在图示示例中为抬高形成件)形成件通常是接收中间部件的贮存器底座开口的一部分。然而,这些中的一个或多个可以形成为中间部件或第三元件的一部分。
[0551]
在图36a至图36c图示的示例中,中间部件9700在其插入路径的末端处被抬高,并通过端口密封件9735,移动到与底架开口密封接合。本技术的示例包括在没有端口密封件9735和/或膜9732的帮助下实施类似的声传递接合。在这些示例中,中间部件9700的高度的变化可以使中间部件9700的端口9730和底架开口7380最接近,或者甚至处于邻接接合。在本技术的一些示例中,可以抬高靠近端口9730的中间部件9700的表面和/或靠近底架开口7380的底架7300的表面,以提供该最接近的状态或邻接接合。
[0552]
如上所述,3个接合点l1至l3的功能包括:(a)升高并移动中间部件9700至与底架开口7380密封接合;和/或(b)可靠地将中间部件9700锁定在接合配置中。本技术的示例包括一种配置,其中底架开口7380不设置在中间部件9700上方(如图36a至36c所示),而设置在围绕中间部件9700的其他方向/位置,诸如在中间部件9700的侧面或下方。在这些示例中,端口9730的位置将设置在中间部件9700 上,使得其对应于底架开口7380的位置。
[0553]
接合形成点l1至l3也可以移动,使得它们中的一个或多个点设置在中间部件9700的与端口9730的位置相对的一侧上。在这些示例中,接合形成点l1至l3将不是“抬高”点,因为它们将促使中间部件9700在其他方向(例如,向侧面)上移动。当底架开口7380设置在一侧上,尤其是在中间部件9700下方时,接合形成点l1至l3的功能仍然是在特定方向上推动中间部件9700,以及将中间部件9700锁定在接合配置中。取决于底架开口7380的位置,接合形成点l1至l3 的朝向底架开口7380推动中间部件9700的功能可以至少部分地由重力提供。
[0554]
在中间部件9700的端口9730包括相关联的端口密封件(即端口密封件6735或端口密封件9735)的示例中,一个或多个接合形成点 l1至l3仍然可用于在中间部件端口9730、底架开口7380和端口密封件之间提供稳定的密封接合。本技术的示例包括作为中间部件
9700的一部分、膜9732的一部分、底架开口7380的一部分和/或独立元件的端口密封件(例如,端口密封件6735或端口密封件9735)。
[0555]
底架开口7380可以具有小于端口9730和/或由端口密封件9735 形成的开口的开口。在一些示例中,底架开口7380可以包括提供变化的横截面轮廓的内表面。图36d示出了内表面的轮廓,其中邻近端口 9730的底架开口7380的第一端设置有开口,该开口小于与第一端相对的底架开口7380的第二端。底架开口7380可以具有在第一端处形成的具有第一直径的圆形形状,和在第二端处形成的具有大于第一直径的第二直径的圆形开口。在一些示例中,第二直径可以等于端口9730 的直径和/或由端口密封件9735形成的开口的直径。可能需要更大的开口来容纳传感器,该开口可能大于第一端上的开口。第一端上的开口可以更小,以降低允许污染物进入传感器和/或电路板上的其他部件的可能性。
[0556]
特定的横截面轮廓特征(在该情况下是前面段落中讨论的两个开口)可以在底架壁中形成。然而,第二(或另外的)开口也可以通过向底架的上表面设置法兰来形成,从而形成包围底架壁上形成的底架开口7380的侧壁7390。图36d图示了这样的从底架7300的表面朝向 pcba 7600延伸的可选的侧壁7390,以提供具有第二直径的第二端。侧壁7390可以改善pcba 7600与底架开口7380的第一端之间的声学密封,并为麦克风接收提供了音频完整性。底架开口7380的内壁可以包括在具有不同直径的第一端与第二端之间的不同的轮廓。图36d示出了其中底架开口7380在其外表面处张开的轮廓,该轮廓限定了在底架壁的两个相对表面处的两个不同的直径。
[0557]
如图36d所示,传感器可以安放在邻近底架开口7380的第二端处和/或至少部分地在其内侧。在一些示例中,传感器4270可以与pcba7600间隔开或远离其延伸,使得传感器4270几乎完全安放在底架开口7380的内侧。由硅树脂、热塑性塑料或另一种柔性材料制成的密封件可以包括在底架壁开口与pcb之间的和/或底架壁开口与检测器之间的界面处。
[0558]
5.9声学分析与检测
[0559]
根据本技术的一方面的rpt装置(4000或6000)可以被配置为基于对沿着空气回路4170的至少一部分(例如,导管和/或面罩)传播的声信号的检测,来识别rpt系统(包括导管和/或面罩)的空气回路 4170的物理特性和/或其内的物理特性。pct专利申请公开号wo2010/091462中描述了呼吸治疗设备的声学检测的示例,该pct专利申请通过引用整体并入本文中。
[0560]
rpt装置可以被配置为使用rpt装置产生的声音(例如,来自鼓风机的叶轮和/或电动机的噪声,或通过装置组装激活的其他机械声音,诸如湿化器贮存器的插入),来识别空气回路4170的物理特性和/或其内的物理特性,该声音向下游行进,例如,沿着导管并到达面罩。类似地,该系统可以利用进入rpt装置的空气路径的环境噪声。一些装置产生的声音可以被沿着空气回路4170的各种物理特征反射,包括导管和面罩,并且沿着导管返回以返回到rpt装置,从而形成“回声”信号。“回声”信号可以被认为是入射到特定特征的信号的滤波反射,并且滤波器可以被认为是特定特征的反射频率响应函数。本领域的技术人员将会理解的是,频率响应函数是脉冲响应函数的复频谱,并且任意一个可以用于定义物理特征的响应,诸如对入射激励信号的反射响应。
[0561]
传感器4270(例如,麦克风)(见图37)可以被配置为检测声音信号。在一些示例中,传感器4270可以被配置为检测原始信号与返回信号(“回声”信号)的组合。传感器4270可以
位于rpt装置4000 的内部空间中。耦接到传感器4270的电路(例如,集成电路和/或处理器)可以被配置为基于所检测的声音来确定空气回路4170的物理特性和/或其内的物理特性。在一些示例中,该电路可以被配置为将信号发送到处理器,其中信号处理可用于估算一个或多个感兴趣的物理特征的反射脉冲响应函数,并且进一步地,可以使用分类系统对一个或多个脉冲响应函数进行分类。在一些示例中,该电路可以被配置为将所检测的返回声音与起初产生的声音进行比较,并且基于两者的差异,推断下游系统的一个或多个参数。例如,该电路可以被配置为确定系统中使用的导管和/或面罩的类型、空气回路4170中障碍物的存在、空气回路4170中的泄漏等。在一些示例中,信号的处理可以是分布式的,例如,集成数字传感器可以在将声信号传至估算的脉冲响应函数的单独处理器之前,将声信号转换成数字信号。脉冲响应函数估算然后可以传至另一个处理器,在该处理器中进行物理特征的分类。在另一示例中,rpt装置可以连接到本地或远程定位的其他装置的网络,并且可以在其他装置上执行处理的任何组合。
[0562]
根据本技术的一方面,传感器4270可以位于rpt装置4000的内部空间中,靠近空气回路4170的导管或者将导管连接到湿化器和/或压力发生器的特征。端口6730(9730)设置成促进入射声音和/或反射声音传播到传感器4270。在本技术的一些示例中,用于将空气回路4170 连接到rpt装置4000的中间部件9700(例如,经由连接到贮存器底座6050和/或水贮存器6100)可以包括声音端口9730,其促进声音(起初产生和/或反射的)传播到传感器4270。
[0563]
图37图示了根据本技术的用于检测声音信号的系统的示例部件。产生的声音(gs)可以由集成rpt装置及湿化器6000(或rpt装置 4000)中的一个或多个部件产生。该声音可以由鼓风机4142的运行产生。产生的声音可以直接或经由一个或多个其他组件传播到空气回路 4170。如图37所示,声音经由水贮存器6100和中间部件9700传播到空气回路4170。空气回路4170中的产生的声音gs的部分可以被沿着空气回路4170和/或患者接口3000的各种物理特征反射。反射的声音可以沿着导管往回行进,以返回到rpt装置6000。产生的声音的部分可以在信号传播路径内的不同位置被反射,包括导管、面罩和/或患者。
[0564]
传感器4270(例如,麦克风)设置在rpt装置中,以感测产生的声音gs和反射的声音rs。如图37所示,传感器4270最接近中间部件9700的端口9730安放。传感器4270可以耦接至pcba 7600,使得传感器4270定位在端口9730上方预定距离处。传感器4270还可以耦接至pcba 7600或另一个pcba上的其他电路,包括被配置为基于所感测的声音来推断空气回路4170的一个或多个参数的处理电路。pcba7600中的振动可以被传感器4270拾取,这可能导致检测到的“回声”信号的劣化。为了减少这种振动的产生,一个或多个质量/弹簧/阻尼元件(诸如橡胶和/或硅树脂垫圈)可以用于将pcba 7600固定于底架,这可以抑制pcba 7600的一些振动并改善“回声”信号的接收。
[0565]
根据本技术的一种形式,传感器4270(例如,麦克风)设置在离端口9730预定距离处。在一个示例中,传感器4270(例如,麦克风) 设置成尽可能接近端口9730。预定距离可以从由底架开口7380的出口限定的表面到传感器4270测量。在一些示例中,预定距离可以从传感器4270到中间部件9700的内表面测量,膜9732可以在该内表面延伸。然而,这些距离对设计不是特别关键,因为共振对入射波和反射波的影响是一样的。
[0566]
预定距离可以基于系统被配置为对其进行解析的最高频率的波长来确定。在一些
7600,并且延伸到被密封壁和相邻侧壁7390包围的区域上方并延伸进入其中,从而有效地在密封壁和侧壁7390上方形成天花板。可以在该天花板部分中设置开口,以允许声音从底架开口7380 传至传感器。替选地,如图36d所示,面向pcba 7600的密封件9800 的天花板部分的表面可以包括对应于由侧壁7390形成的开口的开口。密封件9800中的开口允许安装在pcba 7600上的传感器4270至少部分地安放在由侧壁7390形成的底架开口中。密封件9800可以包括围绕密封件9800中的开口周边的周边密封形成件9805。如图36d所示,周边密封形成件9805可以设置在侧壁7390的外侧边缘处。当组装 pcba 7600和底架7300时,周边密封形成件9805可以提供抵靠pcba 7600的压缩型密封。底架7300的邻近侧壁7390的一部分可以在组装时将密封9800压靠pcba 7600。
[0572]
密封件9800和/或周边密封形成件9805可以防止外部噪声进入底架开口和/或可以减少pcba 7600与底架7300之间的振动传递。密封件9800和/或端口密封件9735提供声学密封,以将声音引导至传感器。周边密封形成件9805可以包括参考图34a至图34d描述的脊密封形成件或参考图35a至图35d描述的唇密封形成件。
[0573]
密封件9800可以使用粘合剂或通过机械方式(例如螺钉或螺栓) 附接到pcba 7600和/或底架7300。在一些示例中,密封件9800可以通过由底架7300抵靠pcba 7600推动来固定,而不使用粘合剂或通过机械方式。
[0574]
5.9.1传感器与中间部件之间的联接
[0575]
如上文参考图37所讨论的,传感器4270(例如,麦克风)安装在pcba 7600上,以感测空气路径中的声音。声音经由中间部件9700 中的端口9730或空气回路4170的另一部分(例如,导管)到达传感器4270。端口9730可以包括膜和/或端口密封件。声音可以经由端口密封件从膜传达至底架7300中的开口7380,安装在pcba 7600上的传感器4270位于该底架7300之后和/或其中。对来自传感器4270的声音进行分析,以确定rpt装置的一个或多个特性和/或空气回路4170 的一个或多个特性。
[0576]
随着时间的推移,各种问题会影响传达至传感器4270和由传感器 4270感测的声音质量和/或rpt装置之间的分析一致性。例如,由于部件的制造公差和/或磨损,传感器4270的相对位置和空气回路4170的特征(例如,中间部件9700、端口9730、端口密封件9735和/或以上参考图34a-36c讨论的膜9732)的变化;一旦声音穿过端口9730和/ 或底架开口7380,声音向周围环境的逃逸;和/或在使用过程中传递到传感器4270的rpt装置(例如,pcba 7600)和/或空气回路4170的部件的振动。
[0577]
本技术的示例(见图38a至图39d)提供了联接器8750,其被配置为将传感器4270柔性地联接至空气回路4170的特征(例如,设置在中间部件中的或空气回路的另一部分中的端口和/或膜),以提高声音质量和一致性。联接器8750被配置为自对准,以确保传感器4270 相对于端口8830和/或膜8732的相对定位(例如,水平和/或垂直)的一致性。联接器8750可以是包括一个或多个磁体的磁性联接器,以将联接器8750对准并保持就位。联接器8750还用作完整的密封的路径,以使声音向周围环境的逃逸最小化。从这个意义上说,联接器至少在某种程度上引导声音沿着它的路径至传感器。联接器8750的柔性抑制了空气回路4170的部件(例如,中间部件8700和/或pcba 7600)的至少一些振动。为了减少振动从pcba 7600到传感器4270的传递,传感器4270可以使用一个或多个阻尼特征(例如,橡胶足)安装在pcba7600上的突片上,该突片可以部分地被切口沟道包围。联接器8750可以是“波纹管”型联接
器,以增加垂直柔性。
[0578]
虽然与将传感器4270联接至空气回路4170相关的特征是参考将传感器4270联接至中间部件来描述的,但是与将传感器4270联接至空气回路4170相关的特征可以包括在实施方式中,其中传感器4270 直接或间接联接至空气回路4170的另一部分(例如,导管或面罩)。例如,与将传感器4270联接至空气回路4170相关的特征可以应用于其中传感器4270联接至空气回路4170的导管中的端口(例如,膜覆盖的开口)的示例。传感器4270可以独立安装,或者安装在rpt装置壳体的内侧的pcba 7600上,或者安装在rpt装置壳体的外侧的另一个pcba 7600上。
[0579]
在以上段落的内容中,可以认为术语“中间部件”(例如,中间部件6700、中间部件8700或中间部件9700)实际上涵盖了将声音源链接到空气回路和检测器的任意组件。在这个意义上,可以认为“中间”是用在声音源与传感器之间的上下文中,以在它们之间提供声学链接,并且不一定限于位于导管和鼓风机之间的部件。因此,在本技术的一些示例中,中间部件可以不在鼓风机与空气回路4170的导管之间的路径中(例如,见图37),但是可以气动地连接到该路径。在一个这样的示例中,中间部件可以连接到空气回路的管中的开口,并且经由端口和设置在中间部件中的密封件连接到传感器。
[0580]
在其他示例中,中间部件可以安放在具有其他部件(例如,压力发生器、湿化器、电路板和/或传感器)的rpt装置的壳体内侧。
[0581]
5.9.1.1传感器的定位和声音路径的对准
[0582]
如上所述,在本技术的一些示例中,传感器4270(例如,麦克风) 设置在中间部件8700中距离端口8830预定距离处。在一些示例中,传感器4270设置在特定的位置处并尽可能靠近端口(例如,端口8830)。然而,由于部件的制造公差、磨损的变化,以及定位空气回路4170的特征的变化(例如,当中间部件8700插入接收底架开口时的位置),传感器4270相对于端口8830和/或膜8732的相对定位(例如,水平和 /或垂直)对于在不同rpt装置中使用的相同部件可能不同,或者可能随着时间而改变,或者当部件被替换或重新组装以供使用时(例如,在清洁之后)。
[0583]
图38a至图39d图示了根据本技术的一示例的将传感器4270联接至中间部件8700的联接器8750。联接器8750被配置为当中间部件 8700插入rpt装置时(例如,图11至图13中所示的贮存器底座6050 的底座出口6090),将传感器4270对准中间部件8700中的端口8830。
[0584]
在一些示例中,中间部件8700可以包括参考中间部件6700(见图13至图15和图19至图22)和/或中间部件9700(件图23至36c) 描述的一个或多个特征,或对应于中间部件6700或中间部件9700。类似地,中间部件6700或中间部件9700可以包括参考中间部件8700描述的一个或多个特征。
[0585]
联接器8750定位在pcba 7600与中间部件8700之间并与之联接。联接器8750可移除地联接到中间部件8700。虽然图38a至图39d图示了联接至中间部件8700的联接器8750,但是在本技术的一些示例中,联接器8750可以可移除地联接至空气回路4170的另一个部件(例如,导管),该另一个部件包括开口以允许声音到达定位在空气回路4170 外侧的传感器4270。
[0586]
联接器8750包括主体8752,其可以是管状主体,包括适于与中间部件8700对接的
入口端8756和适于与传感器4270和/或pcba 7600 对接的出口端8758。联接器8750可以由相对柔软的材料(例如,热塑性弹性体(tpe)或硅树脂)构成。主体8752可以包括安放在入口端 8756与出口端8758之间的一个或多个波纹管8754。一个或多个波纹管8754适于允许入口端8756相对于出口端8758在水平和/或垂直方向上移位,出口端8758可以固定于传感器4270和/或pcba 7600,而不干扰联接。
[0587]
在本技术的一种形式中,联接器8750的材料的柔性可以允许入口端8756相对于出口端8758在水平和/或垂直方向上移位,而不会干扰联接。在该示例中,除了一个或多个波纹管8754之外,或者代替一个或多个波纹管8754,可以提供由于材料的柔性引起的水平和/或垂直方向的移位。
[0588]
出口端8758包括开口8764,开口8764被配置为接合设置在pcba7600上的传感器4270。出口端8758中的开口8764可以对应于传感器 4270(例如,传感器壳体4271)的形状和大小。传感器4270可以压配合到出口端8758中的开口8764中和/或可以胶合或冷焊以将传感器 4270固定于联接器8750。传感器4270可以可移除地联接在开口8764 中。
[0589]
出口端8758可以包括法兰8759,其适于紧靠传感器4270的一部分和/或包围传感器的pcba 7600的一部分。法兰8759可以从主体8752 延伸,并且从主体8752的中心轴向外和/或从主体8752朝向主体8752 的中心轴延伸。在一个示例中,出口端8758可以联接至传感器4270,而不直接触及pcba 7600。在另一个示例中,联接器8750的出口端的至少一部分可以与pcba 7600接触。在另一个示例中,出口端8758 可以接触(和/或附接到)pcba 7600,但是传感器4270的主体偏离 pcba 7600预定距离,使得传感器不直接位于pcba 7600上,而是仍然附接到pcba 7600。在该示例中,出口端可以是关闭的,一个或多个橡胶足(见图41a至图41c中的橡胶足8788)可以设置在出口端8758 上,用于将联接器8750连接到pcba 7600,并且一个或多个端口8786 可以用于将连接传感器的电线传至pcba 7600。
[0590]
入口端8756包括适于接收第一连接元件8762的联接部分8760。联接部分8760可以包括法兰,该法兰包括对应于第一连接元件8762 的形状的互补形状。在一些示例中,第一连接元件8762可以是环,其适于抵靠法兰压配合和压配合在延伸经过法兰的主体8752的一部分上。第一连接元件8762可以胶合或冷焊到入口端8756。在一些示例中,入口端8756可以包覆成型至第一连接元件8762,使得入口端8756围住第一连接元件8762。
[0591]
第一连接元件8762适于可移除地连接到安放在中间部件8700上或中的第二连接元件8766。第一连接元件8762和/或第二连接元件8766 可以包括适于彼此连接的磁体。在一些示例中,第一连接元件8762和第二连接元件8766中的一者包括磁体,并且第一连接元件8762和第二连接元件8766中的另一个包括适于连接到磁体的金属材料。第一连接元件8762的形状可以对应于第二连接元件8766的形状。在一个示例中,第一连接元件8762的形状和大小可以与第二连接元件8766的形状和大小相同。在一个示例中,第一连接元件8762的形状可以与第二连接元件8766的形状相同,并且第二连接元件8766的大小可以大于第一连接元件8762。
[0592]
第二连接元件8766设置在中间部件8700的表面上(例如见图 39b),或者安放在中间部件8700的表面的至少一部分下方(例如见图39a)。第二连接元件8766附接到中间部件8700。第二连接元件 8766可以是围绕中间部件8700表面中的端口8830定位的环。第二连接元件8766可以定位成使得第二连接元件8766的中心轴与端口8830 的中心轴是共有的。在
一些示例中,端口8830的开口可以在形状和/ 或大小上对应于第二连接元件8766中的和/或第一连接元件8762中的开口。
[0593]
在一些示例中,第二连接元件8766可以设置在膜8732之下或适于覆盖第二连接元件8766的至少一部分(例如,沿着环的周边)的另一元件(例如,硅树脂环状元件)之下。膜8732或其他元件可以联接至中间部件8700的邻近第二连接元件8766的外周的表面。该膜可以是薄的硅树脂膜,其是透声的,但不渗透液体和/或气体。膜8732可以具有对应于第一连接元件8762和/或第二连接元件8766的外形和/或大小的形状和/或大小。如图38b、图39a和图39b所示,在本技术的一些示例中,膜8732可以是圆形的,并且延伸超过第二连接元件8766。
[0594]
在本技术的一些示例中,膜8732可以包括上述膜9732的一个或多个特征(例如,见图34a至图36c)。在本技术的一些示例中,膜 8732可以设置在中间部件8700的内表面上(例如,见图34a至图36c 所示的膜9732)。
[0595]
在本技术的一些示例中,膜8732可以被配置为覆盖联接器8750 的邻近中间部件8700的一端。例如,该膜可以设置在联接器8750的一端与第一连接元件8762之间。
[0596]
在本技术的一些示例中,第二连接元件8766可以设置为端口密封件的内侧的一部分(见图34a至36c中的端口密封件9735)。在该示例中,第二连接元件8766可以包括在端口密封件9735的一部分中或在其之下。例如,第二连接元件8766可以包括在脊密封件9737中、唇密封件9742中、连接部分9739中或连接部分9739之下。
[0597]
在本技术的一些示例中,可以使用诸如机械锁定方法、临时粘贴方法或抽吸方法之类的其他机械联接,以将联接器8750可移除地联接至中间部件8700。
[0598]
如图39a图示的,联接器8750可以从pcba 7600延伸并通过底架7300中的底架开口7380朝向端口8830延伸。在一些示例中,传感器4270的至少一部分可以延伸到底架开口7380或通过底架开口7380。图36d示出了安放在底架开口7380上方的pcba 7600和由至少部分延伸到底架开口7380中的pcba 7600支撑的传感器4270。在一些示例中,传感器的中心可以与底架开口7380的中心轴对齐。在替代布置中,中间部件可以不直接将压力发生器与空气输送管连接,但仍然可以气动地连接到它们两者。同样,在替代布置中,位于中间部件的开口与传感器之间可能不是底架壁。在这种情况下,所有上述描述仍然适用,但是在中间部件的开口与pcba 7600(例如,见图37)或声学传感器可能位于其上的另一部件之间直接连接的内容中。
[0599]
当中间部件8700插入接收贮存器底座6050并定位就位使(例如,见图36a至图36c),联接器8750的入口端8756可能在水平和/或垂直方向上不与端口8830对准。第一连接元件8762与第二连接元件8766 以及一个或多个波纹管8754之间的吸引和连接属性允许入口端8756 在水平和/或垂直方向上移位,从而允许第一连接元件8762对准并连接到第二连接元件8766,在它们彼此最接近时。第一连接元件8762和第二连接元件8766的对准(例如,通过具有共同的轴),以及可以包括在连接布置中的任何附加元件,可以提供用于声音从中间部件8700直接行进到传感器4270的路径,而不需要任何元件与底架7300或pcba7600机械接触。当对准时,端口8830、第一连接元件8762和第二连接元件8766可以具有共有的垂直轴。
[0600]
入口端8756与端口8830的对准提供了用于声音经由端口8830从中间部件8700行
进到传感器4270的经对准的路径。即使中间部件8700 的最终位置相对于传感器4270的固定位置有变化,该路径也是一致的。
[0601]
5.9.1.2减轻声音逃逸的特征
[0602]
联接器8750还用作完整的密封的路径,以使声音向周围环境的逃逸最小化。图40a图示了在传感器4270与中间部件8700之间不包括联接器8750的情况下可能发生的声音逃逸。如图40a所示,在声音穿过膜8732之后,声音被导向传感器4270。然而,传感器4270与膜8732 和/或端口8830之间的水平未对准可能导致一部分声音被导向传感器 4270的侧面,从而使传感器4270捕获的声音减少,影响捕获的声音的质量。垂直对准的变化可以增加或减少导向传感器4270的侧面的声音的量。
[0603]
图40b图示了根据本技术的示例的在传感器4270与中间部件 8700之间包括联接器8750的系统中可能发生的声音逃逸。联接器8750 与中间部件8700中的端口8830的自对准提供了用于声音从中间部件 8700传播到传感器4270的密封的路径。如图40b所示,没有垂直和/ 或水平未对准,很少或没有声音会逃逸到传感器4270的侧面。相应地,联接器8750用作完全密封的路径,以使声音向周围环境的逃逸最小化。
[0604]
5.9.1.3减轻振动的特征
[0605]
rpt装置和/或空气回路4170的部件中的振动可能降低传感器 4270捕获的声音的质量。由联接器8750和/或波纹管8754的材料提供的联接器8750的柔性抑制了在空气回路4170中产生和/或经由空气回路4170传至传感器4270的至少一些振动。
[0606]
可能使所检测的“回声”信号劣化的振动也可以从pcba 7600传至传感器4270。pcba 7600连接到底架,底架拾取由rpt装置的部件 (如鼓风机电动机)引起的振动。如上所述,为了减少这种振动在pcba7600中产生,一个或多个阻尼元件,诸如橡胶和/或硅树脂垫圈,可以用于将pcba 7600固定于底架,这可以抑制pcba 7600的任何振动并改善“回声”信号的接收。
[0607]
5.9.1.3.1橡胶接口
[0608]
本说明书中公开的其他示例可以包括的另一个特征是在将传感器 4270紧固到pcba 7600时提供一个或多个阻尼元件,以阻尼从pcba7600传至传感器4270的振动。图41a至图41c示出了用于将传感器 4270联接至pcba 7600的橡胶接口8780。橡胶接口8780设置在传感器4270与pcba 7600之间。橡胶接口8780可以用作振动阻尼器。橡胶接口8780提供了用于支撑传感器4270和用于隔离来自pcba 7600 的振动的柔性壳体。橡胶接口8780还可以减少从中间部件8700传至传感器4270的振动。
[0609]
橡胶接口8780可以包括管状主体8782,其一端包括接口开口8784,并且相对端8785是关闭的。虽然图41a至图41c示出了包括管状内部和外部形状的橡胶接口8780,但是本技术的示例不限于此,并且可以包括其他形状(例如,正方形或矩形内部或外部形状)。
[0610]
接口开口8784可以被配置为至少部分地在橡胶接口8780内侧接收和保持传感器4270(图41a至图41c中未示出)。在一些示例中,传感器4270的至少一部分可以延伸到管状主体8782之外。在一些示例中,传感器4270可以设置在橡胶接口8780的内侧,而不延伸到管状主体8782的外侧。
[0611]
一个或多个连接端口8786可以设置在邻近pcba 7600的橡胶接口8780的封闭端8785上。pcba 7600上的电路元件与传感器4270上的电连接之间的一个或多个连接(图41a
至图41c中未示出)可以经由一个或多个连接端口8786来路由。
[0612]
橡胶接口8780可以包括在封闭端8785上的多个橡胶足8788,其被配置成将橡胶接口8780的封闭端从pcba 7600偏移,并将橡胶接口 8780联接至pcba 7600。橡胶足8788可以减少pcba 7600与橡胶接口8780之间的接触面积,从而减少从pcba 7600传递到传感器4270 的振动的量。
[0613]
在本技术的一个示例中,橡胶接口8780可以被配置为接合图38a 至图39d所示的联接器8750的出口端8758。在该示例中,橡胶接口 8780可以对应于图39a所示的传感器壳体4271。
[0614]
在本技术的另一个示例中,橡胶接口8780可以对应于联接器8750,该联接器8750被配置为将传感器4270联接至中间部件8700(见图41c)。在该示例中,橡胶接口8780可以包括橡胶接口8780内侧的或附接到接口开口8784的第一连接元件8762(在图41c未示出)。第一连接元件8762被配置为联接至设置在中间部件8700中或其表面上的第二连接元件8766(在图41c未示出)。在该示例中,橡胶接口8780提供了与中间部件8700的连接,同时为来自中间部件8700和pcba 7600的振动提供振动阻尼。
[0615]
5.9.1.3.2电路板中的沟道切口
[0616]
用于减轻传至传感器4270的振动的另一个特征可以包括在本说明书公开的其他示例中,该特征包括提供在pcba 7600中切出的一个或多个沟道8900,以减少/抑制来自传感器4270中的pcba 7600的振动。沟道8900是通过pcba 7600的厚度切的。图42a至图42c示出了在pcba 7600中切出的沟道8900的示例。沟道8900的切口宽度可以对应于pcba 7600的厚度。
[0617]
pcba 7600包括传导性轨道7602,该传导性轨道7602被配置为连接到传感器4270,并将信号发送到设置在pcba 7600上和/或外的其他部件。pcba 7600包括通孔7604,该通孔7604被配置为将传感器 4270的引线联接至传导性轨道7602。沟道8900至少部分地围绕通孔 7604设置,该通孔7604设置在由沟道8900形成的pcba 7600的悬挂突片8910上。传导性轨道7602经由突片8910的已连接部分8920从通孔7604延伸到其他部件。
[0618]
沟道8900减少了传递到传感器4270的振动的量。虽然到传感器 4270的振动仍然可以经由已连接部分8920传递,但是传递到悬挂突片 8910的振动的量大大减少。
[0619]
在一些示例中,除了减少振动之外,由于由第一连接元件8762和第二连接元件8766的联接引起的吸引,突片8910可以在垂直方向上偏斜,以对准联接至突片8910的传感器4270。例如,第一连接元件 8762与第二连接元件8766之间的吸引力可以使突片8910向下偏斜,以将传感器4270定位成比没有沟道8900的情况更接近端口8830。图 42b和图42c中示出的传感器4270可以包括第一连接元件8762,或者可以其设置有用于连接到第二连接元件8766的联接器8750。
[0620]
在本技术的一些示例中,提供突片的切口沟道可以设置在pcba7600连接到底架的位置中的每一个位置处。在该示例中,由切口沟道提供的突片可以减少从底架传至pcba 7600的振动。
[0621]
5.9.1.4柔性传感器壳体
[0622]
另一个可以改善传感器定位并减轻声音逃逸和/或振动的特征是在柔性壳体8800中提供传感器4270。图43示出了根据本技术的一示例的安放在柔性壳体8800中的传感器
4270。图43中图示的一个或多个特征可以在本说明书中公开的本技术的其他示例中提供。
[0623]
如图43图示的,传感器4270安放在柔性壳体8800中,该柔性壳体8800包括在其一端处的传感器4270。壳体8800的一端包括连接部分8810,该连接部分8810被配置为将柔性壳体8800联接至pcba 7600。连接部分8810可以包括多个立柱8814,该立柱8814适于接合pcba7600中的通孔,并将柔性壳体8800固定在pcba 7600的表面上。柔性电线8820耦接至柔性壳体8800中的传感器4270,并且在柔性壳体 8800的内侧并且沿着柔性壳体8800的长度延伸到包括连接部分8810 的柔性壳体8800的一端。柔性电线8820提供了传感器4270与pcba7600上和/或外的部件之间的连接。
[0624]
柔性壳体8800可以包括模制的硅树脂或橡胶,其可以包覆成型在传感器4270和/或柔性电线8820上。柔性壳体8800适于在施加力时弯曲,例如施加到包括传感器4270的柔性壳体8800的端部。
[0625]
在使用中,当中间部件8700(或包括端口8830的另一空气回路部件)插入时,包括传感器4270的柔性壳体8800的端部可以由插入的中间部件8700推动,从而使柔性壳体8800从平衡位置偏斜。柔性壳体8800的偏斜允许中间部件8700在完全组装位置接合底架(例如,见图36a至图36c),而不损坏传感器4270。在完全组装位置,柔性壳体8800和传感器4270与端口8830对准,从而允许柔性壳体8800 偏斜回到平衡位置。在该位置,传感器4270可以定位在端口8830和/ 或中间部件8700的内侧。当中间部件8700被移除时,柔性壳体8800 可以被端口8830的侧面推动,并从平衡位置偏斜,从而允许移除中间部件8700而不损坏传感器4270。
[0626]
如图43所示,在完全组装位置,包括传感器4270的柔性壳体8800 的端部至少部分地定位在端口8830的内侧。在一些示例中,传感器4270 的一部分可以设置在中间部件8700的外表面下方和中间部件8700的内表面下方(见图43)。
[0627]
柔性壳体8800允许传感器4270至少部分地定位在端口8830的内侧、中间部件8700的内侧和/或最接近膜8732,以改善传感器4270捕获的声音。
[0628]
端口8830和/或柔性壳体8800可以包括一个或多个特征,该特征被配置为减少端口8830和/或柔性壳体8800上的磨损,和/或提供柔性壳体8800的逐渐偏转。例如,如图43所示,柔性壳体8800可以包括圆的边缘8816,和/或端口8830的边缘8832可以是斜切的,以减少磨损和/或提供柔性外壳8800的逐渐偏转。在一些是示例中,边缘8816 可以是斜切的和/或边缘8832可以是圆的。
[0629]
虽然在图43中未图示,但是包括脊密封件9737或唇密封件9742 的端口密封件(即端口密封件9735)可以设置在中间部件8700与底架 7300的表面之间。
[0630]
5.9.2用于声学检测与分析的示例方法
[0631]
图44图示了根据本技术的用于声学检测与分析的示例方法。可以由硬件电路(例如,处理器)和/或软件来执行一个或多个操作。在步骤1002,rpt装置被控制以经由空气回路4170向患者提供可呼吸气体流。控制rpt装置可以包括控制鼓风机、湿化器和管子中的至少一者的运行。rpt装置的运行可以产生在空气回路4170中传播的声音(例如,来自鼓风机的声音)。在这种情况下,空气回路4170中的声音由在rpt装置的运行过程中移动/振动的元件产生。也可以使用专用扬声器,作为用于产生声音的rpt装置的一部分。类似地,可使用一种特征,诸如rpt或其他部件内的流动路径中的尖锐边缘,以产生湍流声音。
[0632]
在步骤1006,由传感器4270检测的声音被捕获。捕获的声音可以表示由rpt装置的运行产生的在空气回路4170中的声音和由空气回路4170中的一个或多个特征朝向rpt装置反射的声音。在rpt装置的运行过程中,声音可以连续地或以预定的间隔被捕获。在一些示例中,声音可以在由患者发起的诊断阶段过程中、在rpt装置的启动过程中、在rpt装置已经使用了预定时间量之后、和/或新导管和/或患者接口的连接过程中被捕获。传感器4270提供的信号可以是模拟信号或数字信号。电路可以包括被配置为将模拟信号转换成数字信号的模数 (a/d)转换器/采样器。电路可以包括一个或多个低通滤波器、一个或多个高通滤波器和/或一个或多个带通滤波器,这些滤波器被配置为在声音信号被分析之前对其进行处理。
[0633]
在步骤1010,基于经处理的声音信号,分析所感测的声音以推断 rpt装置的一个或多个特性和/或空气回路4170的一个或多个特性。 rpt装置的一个或多个特性可以包括rpt装置中的部件的正确或不正确运行。例如,基于所感测的声音,可以确定鼓风机的正确或不正确运行。空气回路4170的一个或多个特性和/或空气回路4170内的一个或多个特性可以包括连接到rpt装置的导管的类型、连接到rpt装置的患者接口的类型,诸如患者接口和/或导管内的障碍物的检测和/或确定使用患者接口的患者。电路可以被配置为产生指示空气回路4170的和/或空气回路4170内的一个或多个确定的特性的输出。
[0634]
在步骤1014,基于步骤1010中的分析结果执行动作。动作可以包括以下各项中的任何一项或多项:基于分析结果控制rpt装置、记录分析结果、显示分析结果和/或经由数据通信接口4280转发分析结果。还可以根据从一个或多个其他传感器接收的信号来控制rpt装置。
[0635]
基于分析结果控制rpt装置可以包括修改一个或多个运行参数 (例如,鼓风机和/或湿化器的运行参数),提供对一个或多个附加特征的访问,和/或移除对一个或多个特征的访问。例如,基于分析结果,鼓风机的转速可以增大或减小。如果在导管和/或患者接口中检测到障碍物,可以控制鼓风机停止运行,并且可以显示错误消息。如果检测到特定类型的导管和/或患者接口,可以将鼓风机和/或湿化器参数修改为与所识别的导管和/或患者接口类型相关联的运行参数。可以基于分析结果和从一个或多个其他传感器(例如,压力传感器或温度传感器) 接收的信号来控制rpt装置。
[0636]
记录分析结果可以包括将分析结果存储在本地和/或可移除存储器中。记录的分析结果可以包括经处理的声音信号。
[0637]
显示分析结果可以包括显示通知,该通知指示一个或多个识别的问题、识别的面罩和/或导管的类型、为解决识别的问题而需要采取的行动的指令、和/或需要检修rpt装置和/或与rpt装置相关联的部件。结果可以显示在物理上联接至rpt装置的显示器(例如,输出装置4290) 上或者与rpt装置通信的显示器上。
[0638]
经由数据通信接口4280转发分析结果可以包括将结果发送到与患者、制造商和/或临床医生相关联的另一装置。
[0639]
确定患者接口的类型可以包括确定患者接口是包括鼻罩还是全面罩。导管和/或患者接口的类型可以基于面罩的声反射和/或导管的声反射之间的差异来识别,并且可以允许在没有用户或患者干预的情况下识别不同的导管和/或面罩。面罩的声反射和/或导管的声反射可以由面罩形状、面罩配置、面罩材料、导管材料和/或导管尺寸(例如导管的厚度
和/或长度)来确定。空气回路4170可以具有导管和面罩的许多不同的变体,每个组合具有不同的声学属性。声学属性可以基于反射信号的反射频率和/或定时来确定。基于确定特定患者正在使用特定患者接口,可对患者进行认证,并向患者提供对可预先存储的rpt装置中的一种或多种专业治疗和/或特征的访问。在用户认证后,可以自动提供对一种或多种专业治疗和/或特征的访问。
[0640]
对所感测的声音的分析可以包括确定所感测的声音信号中起初产生的声音和反射的声音(例如,回声信号),并将反射的声音与相应产生的声音进行比较。替代分析可能涉及使用对数频谱的傅立叶逆变换来从原始声音和rpt装置的脉冲响应函数中分离目标元件(管子或面罩)的脉冲响应函数(irf)或目标元件的部件。面罩的irf用于产生特征,该特征可用于经由机器学习分类器对目标元件进行分类。在一些示例中,所感测的声音信号可以与存储的参考信号进行比较。在一些示例中,可以确定所感测的声音信号的特性,并将其与与特定导管、面罩和/或使用者相关联的已知特性进行比较。
[0641]
对所感测的声音的分析可以包括基于比较来识别空气回路4170 的物理特性和/或空气回路4170内的物理特性。该分析可以包括将以下各项中的至少一项:所感测的声音、从所感测的声音中提取的起初产生的声音和/或从所感测的声音中提取的系统部件的声音的反射属性,与以下各项中的至少一项进行比较:与rpt装置的正确运行相关的参考信号、与特定导管相关的参考信号、与特定患者接口相关的参考信号、与特定患者相关的参考信号、和/或与特定导管、特定患者接口和/ 或特定患者的任何组合相关的参考信号。pct专利申请公开号wo2010/091462中描述了分析所感测的音频信号的另外的示例,该pct专利通过引用整体并入本文中。
[0642]
中间部件和传感器4270(例如,麦克风)的特征可以被配置为感测大范围的频率,这些频率可以携带来自导管和/或患者接口的有用的反射信号。在一些示例中,至少一些高信号频率可能在导管和/或面罩中丢失。在这种情况下,优选地将膜9732或8732和/或传感器4270的传递函数调谐到较低频率的剩余信号。在一些示例中,可以调谐膜9732 或8732和/或传感器4270,以获得约10khz以下的信号。在一些示例中,可以修改空气回路4170的特性,以通过增加面罩和/或导管的壁的刚度来增加返回信号的频率范围。然而,这并非总是可行的,因为修改空气回路4170的特性(例如,通过增加壁厚和/或由更高密度的材料构造管壁)可能与具有更轻且更柔性的空气回路4170的一般呼吸系统偏好相冲突。
[0643]
如图5c所示,包括中间部件6700、8700、9700和相关联的声音检测布置在内的大部分上述描述是针对与存在集成湿化器一致的系统。然而,该描述同样地适用于替代布置,诸如非加湿的系统。这种系统的说明性示例在图5b中图示,其中水贮存器6100由消音器4124代替。在该情况下,中间部件的入口端6710(9710)被配置为不与水贮存器 6100接合,而是直接与贮存器底座6050接合。在没有水贮存器底座的情况下,如非加湿的rpt装置的情况,中间部件的入口端6710(9710) 可以连接到rpt装置的气动块,该气动块包括装置的电动机和螺桨。此外,中间部件可以不是可移除的部件,而是rpt装置的一部分,其被设置为优选地通过限定流动路径的方式,将来自水贮存器、气动块和/或空气输送管4170的声音信号传播到装置中的检测传感器(例如麦克风)。
[0644]
类似地,传感器4270不是位于邻近端口8830或9730处,而是位于端口8830或9730的外侧,实际上可以被布置为在端口内突出,或者甚至在中间部件6700、8700或9700的内部
空间内突出。
[0645]
5.10呼吸波形
[0646]
图4示出了睡眠时人的模型典型呼吸波形。横轴为时间,纵轴为呼吸流量。而参数值可以变化,典型呼吸可以具有以下近似值:潮气量vt 0.5l,吸气时间ti 1.6s,峰值吸气流量qpeak 0.4l/s,呼气时间 te 2.4s,峰值呼气流量qpeak-0.5l/s。呼吸的总持续时间ttot约为4s。人通常以每分钟大约15次呼吸的速率(bpm),以通气量vent约 7.5l/min的通气呼吸。典型的占空比,ti与ttot之比约为40%。
[0647]
5.11术语表
[0648]
为了实现本技术公开内容的目的,在本技术的某些形式中可应用下列定义中的一个或多个。本技术的其他形式中,可应用另选的定义。
[0649]
5.11.1通则
[0650]
空气:在本技术的某些形式中,空气可以被认为意指大气空气,并且在本技术的其他形式中,空气可以被认为是指可呼吸气体的一些其他组合,例如富含氧气的大气空气。
[0651]
周围环境:在本技术的某些形式中,术语环境可具有以下含义(i) 治疗系统或患者的外部,和(ii)直接包围治疗系统或患者。
[0652]
例如,相对于湿化器的环境湿度可以是直接包围湿化器的空气的湿度,例如患者睡觉的房间内的湿度。这种环境湿度可以与患者睡觉的房间外侧的湿度不同。
[0653]
在另一示例中,环境压力可以是直接包围身体或在身体外部的压力。
[0654]
在某些形式中,环境(例如,声学)噪声可以被认为是除了例如由rpt装置产生或从面罩或患者接口产生的噪声外的患者所处的房间中的背景噪声水平。环境噪声可以由房间外的声源产生。
[0655]
自动气道正压通气(apap)治疗:其中治疗压力在最小限度和最大限度之间是可自动调整的cpap治疗,例如随每次呼吸而不同,这取决于是否存在sbd事件的指示。
[0656]
持续气道正压通气(cpap)治疗:其中在患者的呼吸周期的整个过程中治疗压力可以是近似恒定的呼吸压力治疗。在一些形式中,气道入口处的压力在呼气过程中将略微更高,并且在吸气过程中略微更低。在一些形式中,压力将在患者的不同呼吸周期之间变化,例如,响应于检测到部分上气道阻塞的指示而增大,以及缺乏部分上气道阻塞的指示而减小。
[0657]
流量:每单位时间输送的空气体积(或质量)。流量可以指瞬时量。在一些情况下,对流量的参考将是对标量的参考,即仅具有大小的量。在其他情况下,对流量的参考将是对向量的参考,即具有大小和方向两者的量。流量可以符号q给出。
‘
流量’有时简单地缩写成
‘
流’或
‘
空气流’。
[0658]
在患者呼吸的示例中,流量对于患者的呼吸周期的吸气部分而言可以在标称上是正的,并且因此对于患者的呼吸周期的呼气部分而言是负的。总流量qt是离开rpt装置的空气流量。通气流量qv是离开通气口以允许冲洗呼出气体的空气流量。泄漏流量ql是从患者接口系统或其他地方的泄漏流量。呼吸流量qr是被接收到患者的呼吸系统中的空气流量。
[0659]
湿化器:术语湿化器将被认为是指湿化设备,该湿化设备被构造和布置或配置有物理结构,该物理结构能够向空气流提供治疗上有益量的水(h2o)蒸汽以改善患者的医疗呼吸状况。
[0660]
泄漏:单词泄漏将被认为是非期望的空气流动。在一个示例中,可由于面罩与患者面部之间的不完全密封而发生泄漏。在另一示例中,泄漏可发生在到周围环境的回转弯头中。
[0661]
噪声,传导的(声学的):本文件中的传导噪声是指通过气动路径(诸如空气回路和患者接口以及其中的空气)带给患者的噪声。在一种形式中,传导噪声可以通过测量空气回路端部处的声压水平来进行量化。
[0662]
噪声,辐射的(声学的):本文件中的辐射噪声是指通过周围空气带给患者的噪声。在一种形式中,辐射噪声可以通过根据iso 3744 测量所讨论的物体的声功率/压力水平来进行量化。
[0663]
噪声,通气的(声学的):本文件中的通气噪声是指由通过穿过任何通气口(诸如患者接口的通气口孔)的空气流动所产生的噪声。
[0664]
患者:人,不论他们是否患有呼吸病症。
[0665]
压力:每单位面积的力。压力可以表达为一系列单位,包括cmh2o、 g-f/cm2和百帕斯卡。1cmh2o等于1g-f/cm2且大约0.98百帕斯卡。在本说明书中,除非另有说明,否则压力以cmh2o为单位给出。
[0666]
患者接口中的压力以符号pm给出,而治疗压力以符号pt给出,该治疗压力表示在当前时刻通过面罩压力pm所获得的目标值。
[0667]
呼吸压力治疗(rpt):以典型相对于大气为正的治疗压力向气道入口施加空气供给。
[0668]
呼吸机:向患者提供压力支持以执行一些或全部呼吸工作的机械装置。
[0669]
5.11.1.1材料
[0670]
硅树脂或硅树脂弹性体:合成橡胶。在本说明书中,对硅树脂的参考是指液体硅橡胶(lsr)或压模硅橡胶(cmsr)。可商购的lsr 的一种形式是silastic(包括在此商标下出售的产品范围中),其由道康宁公司(dow corning)制造。lsr的另一制造商是瓦克集团 (wacker)。除非另有相反的规定,否则lsr的示例性形式具有如使用astm d2240所测量的约35至约45范围内的肖氏a(或类型a) 压痕硬度。
[0671]
聚碳酸酯:是双酚a碳酸酯的透明热塑性聚合物。
[0672]
5.11.1.2机械属性
[0673]
回弹性:材料在弹性变形时吸收能量并在卸载时释放能量的能力。
[0674]
弹性:在卸载时将释放基本上所有的能量。包括例如某些硅氧烷和热塑性弹性体。
[0675]
硬度:材料本身抵抗变形的能力(例如由杨氏模量或在标准化样品大小上测量的压痕硬度标度所描述)。
[0676]“软”材料可以包括硅树脂或热塑性弹性体(tpe),并且可以例如在手指压力下容易地变形。
[0677]“硬”材料可以包括聚碳酸酯、聚丙烯、钢或铝,并且可以不容易例如在手指压力下变形。
[0678]
结构或部件的刚度(或刚性):结构或部件抵抗响应于所施加的负载的变形的能力。负载可以是力或力矩,例如压缩、拉伸、弯曲或扭转。该结构或部件可以在不同方向上提供不同的阻力。
[0679]
柔软结构或部件:当在诸如1秒内的相对短的时间使其支撑其自身重量时,将改变形状(例如弯曲)的结构或部件。
[0680]
刚性结构或部件:当承受使用中通常遇到的负荷时基本上不会改变形状的结构或部件。这种使用的示例可以是例如在大约20至30 cmh2o的压力下,设置和保持患者接口与患者气道的入口成密封关系。
[0681]
作为示例,i形梁可以包括与第二正交方向相比在第一方向上不同的弯曲刚度(抵抗弯曲负载)。在另一示例中,结构或部件可以在第一方向上是柔软的并且在第二方向上是刚性的。
[0682]
5.11.2呼吸周期
[0683]
呼吸暂停:根据一些定义,当流量降到低于预定阈值达持续一段时间(例如10秒)时认为发生呼吸暂停。当即使患者努力,气道的一些阻塞也不允许空气流动时,认为发生阻塞性呼吸暂停。当尽管气道是开放(patent)的,但是由于呼吸努力的减少或不存在呼吸努力而检测到呼吸暂停时,认为发生中枢性呼吸暂停。当呼吸努力的减少或不存在与阻塞的气道同时发生时,认为发生混合性呼吸暂停。
[0684]
呼吸速率:患者的自发呼吸的速率,其通常以每分钟呼吸次数来测量。
[0685]
占空比:吸气时间ti与总呼吸时间ttot的比值。
[0686]
努力(呼吸):自发呼吸者尝试呼吸所做的工作。
[0687]
呼吸周期的呼气部分:从呼气流量开始到吸气流量开始的时间段。
[0688]
流量限制:流量限制将被认为是患者呼吸中的状态,其中患者的努力增加不会导致流量的相应增加。在呼吸周期的吸气部分期间发生流量限制的情况下,可以将其描述为吸气流量限制。在呼吸周期的呼气部分期间发生流量限制的情况下,可以将其描述为呼气流量限制。
[0689]
流量限制的吸气波形的类型:
[0690]
(i)平坦化的:具有一个上升,后跟一个相对平坦的部分,然后是下降。
[0691]
(ii)m形:具有两个局部峰,一个在前沿处,一个在后沿处,并且两个峰之间具有相对平坦的部分。
[0692]
(iii)椅形:具有单一的局部峰,峰处于前沿处,然后是相对平坦的部分。
[0693]
(iv)反向椅形:具有相对平坦的部分,然后是单个局部峰,峰位于后沿处。
[0694]
呼吸不足:根据一些定义,呼吸不足将被认为是流量的减少,而不是流量的停止。在一种形式中,当流量降低到阈值以下持续存在一段时间时,可以认为发生呼吸不足。当由于呼吸努力的减少而检测到呼吸不足时,认为发生中枢性呼吸不足。在成年人的一种形式中,以下的任一种均可以看做是呼吸不足:
[0695]
(i)患者呼吸减少30%持续至少10秒加相关的4%去饱和;或者
[0696]
(ii)患者呼吸减少(但小于50%)持续至少10秒,伴随相关的至少3%的去饱和或觉醒。
[0697]
呼吸过度:流量增大到高于正常的水平。
[0698]
呼吸周期的吸气部分:从吸气流量开始到呼气流量开始的时间段被认为是呼吸周期的吸气部分。
[0699]
开放性(气道):气道被打开的程度或气道是打开的程度。开放的气道是打开的。气
道开放性可以被定量,例如值(1)为开放的,并且用值零(0)为封闭的(阻塞的)。
[0700]
呼气末正压通气(peep):存在于呼气末的肺中的高于大气压的压力。
[0701]
峰值流量(q峰值):呼吸流量波形的吸气部分期间的流量的最大值。
[0702]
呼吸流量、患者空气流量、呼吸空气流量(qr):这些同义词术语可被理解成指rpt装置对呼吸流量的估算,与“真实呼吸流量”或“真实呼吸流量”相对,其是由患者所经历的实际呼吸流量,通常以升/每分钟表示。
[0703]
潮气量(vt):当不施加额外的努力时,在正常呼吸期间吸入或呼出的空气体积。原则上,吸气体积vi(吸入空气的体积)等于呼气体积ve(呼出的空气的体积),因此单个潮气量vt可以被定义为等于任一量。实际上,潮气量vt被估计为吸气量vi和呼气量ve的某种组合,例如平均值。
[0704]
(吸气)时间(ti):呼吸流量波形的吸气部分的持续时间。
[0705]
(呼气)时间(te):呼吸流量波形的呼气部分的持续时间。
[0706]
(总)时间(ttot):一个呼吸流量波形的吸气部分的开始与随后的呼吸流量波形的吸气部分的开始之间的总持续时间。
[0707]
典型的近期通气量:在一些预定时间量程内通气量vent近期值围绕其趋于集群的通气值,也就是通气量近期值的集中趋势的量度。
[0708]
上气道阻塞(uao):包括部分和全部上气道阻塞。这可能与流量限制的状态相关联,其中随着上气道上的压力差增加流量仅稍微增加,或者甚至降低(starling阻抗行为)。
[0709]
通气量(vent):由患者的呼吸系统所交换的气体速率的测量值。通气量的测量值可以包括吸气和呼气流量(每单位时间)中的一者或两者。当表达为每分钟的体积时,此量通常被称为“每分钟通气量”。每分钟通气量有时简单地作为体积给出,并理解成是每分钟的体积。
[0710]
5.11.3通气量
[0711]
自适应伺服呼吸机(asv):具有可变的而不是固定的目标通气量的伺服呼吸机。可以从患者的一些特征(例如患者的呼吸特征)中获知可变的目标通气量。
[0712]
备用速率:呼吸机的参数,其确定呼吸机将输送至患者的最小呼吸速率(通常以每分钟呼吸次数计),如果不是由自发呼吸努力触发的话。
[0713]
循环的:呼吸机的吸气阶段的终止。当呼吸机向自发呼吸的患者输送呼吸时,在呼吸周期的吸气部分的末期处,认为呼吸机循环以停止输送呼吸。
[0714]
呼气气道正压力(epap):将呼吸内变化的压力加到其中以产生呼吸机在给定时间将尝试实现的期望面罩压力的基础压力。
[0715]
呼气末压力(eep):呼吸机在呼气部分的末期时尝试实现的期望面罩压力。如果压力波形模板π(φ)在呼气的末期时为零值,即当φ= 1时,ππ(φ)=0,则eep等于epap。
[0716]
吸气气道正压力(ipap):呼吸机在呼吸的吸气部分期间尝试实现的最大期望面罩压力。
[0717]
压力支持:指示呼吸机吸气期间压力增加超过呼吸机呼气期间的压力的数字,并且通常意指吸气期间的最大值与基础压力之间的压力差(例如,ps=ipap-epap)。在一些情况下,压力支持意指呼吸机旨在实现的差异,而不是实际实现的差异。
[0718]
伺服呼吸机:测量患者通气量的呼吸机,其具有目标通气量并调整压力支持的水
平以使患者通气量达到目标通气量。
[0719]
自发的/定时的(s/t):呼吸机或其他装置的模式,其试图检测自发呼吸患者的呼吸的开始。然而,如果装置在预定的时间段内不能检测到呼吸,则装置将自动启动呼吸的输送。
[0720]
摆动:与压力支持等同的术语。
[0721]
触发的:当呼吸机将呼吸的空气输送至自发呼吸的患者时,认为通过患者的努力在呼吸周期的呼吸部分开始时被触发。
[0722]
5.11.4患者接口
[0723]
防窒息阀(aav):通过以故障安全方式向大气开放,降低了患者过度的co2再呼吸的风险的面罩系统的部件或子部件。
[0724]
弯头:弯头是一种结构的示例,其引导通过其行进的空气流的轴经一定角度改变方向。在一种形式中,该角度大约为90度。在另一种形式中,该角度可以大于或小于90度。弯头可以具有近似圆形的横截面。在另一种形式中,弯头可以具有椭圆形或矩形截面。在某些形式中,弯头可相对于配合部件旋转,例如约360度。在某些形式中,弯头可以例如经由卡扣连接从配合部件可移除。在某些形式中,弯头可以在制造过程中经由一次卡扣组装到配合部件,但不能由患者移除。
[0725]
框架:框架将被认为意指承载两个或两个以上与头带的连接点之间的张力负荷的面罩结构。面罩框架可以是面罩中的非气密的负荷承载结构。然而,一些形式的面罩框架也可以是气密的。
[0726]
头带:头带将被认为意指为一种形式的经设计用于头部上的定位和稳定结构。例如,头带可包括一个或多个支撑杆、系带和加固物的集合,其被配置为将患者接口定位并保持在患者面部上用于输送呼吸治疗的位置。一些系带由柔软的、柔性的、有弹性的材料,诸如泡沫和织物的层压复合材料形成。
[0727]
膜:膜将被认为意指典型地薄的元件,其优选地基本上不具有抗弯曲性,但是具有抗拉伸性。
[0728]
充气室:面罩充气室将被认为意指患者接口的具有至少部分包围一定体积空间的壁的部分,该体积在使用时具有在其中增压至超过大气压力的空气。壳可以形成面罩充气室的壁的一部分。
[0729]
密封:可以是指结构的名词形式(“密封件”),也可以是指该效果的动词形式(密封)。两个元件可以被构造和/或布置成
‘
密封’或在其间实现
‘
密封’,而不需要单独的
‘
密封’元件本身。
[0730]
壳:壳将被认为意指具有可弯曲、可伸展和可压缩刚度的弯曲且相对薄的结构。例如,面罩的弯曲结构壁可以是壳。在一些形式中,壳可以是多面的。在一些形式中,壳可以是气密性的。在一些形式中,壳可以不是气密性的。
[0731]
加强件:加强件将被认为意指设计成在至少一个方向上增加另一个部件的抗弯曲性的结构性部件。
[0732]
支撑物:支撑物将被认为是设计成在至少一个方向上增加另一个部件的抗压缩性的结构性部件。
[0733]
旋轴(名词):被配置为围绕共同轴旋转的部件的子部件,优选地独立地,优选地在
低扭矩之下。在一种形式中,旋轴可以被构造成经过至少360度的角度旋转。在另一种形式中,旋轴可以被构造成经过小于360度的角度旋转。当在空气输送导管的情况下使用时,部件的子组件优选地包括一对匹配的圆柱形导管。在使用时可以很少或没有从旋轴中泄漏的空气流。
[0734]
系带(名词):一种用于抵抗张力的结构。
[0735]
通气口(名词):允许从面罩内部或导管到环境空气的空气流动例如用于有效冲洗呼出气体的结构。例如,临床上有效的冲洗可以涉及每分钟约10升至约每分钟约100升的流量,这取决于面罩设计和治疗压力。
[0736]
5.11.5结构的形状
[0737]
根据本技术的产品可以包括一个或多个三维机械结构,例如面罩衬垫或推进器。三维结构可以由二维表面界定。这些表面可以使用标记来区分以描述相关表面定向、位置、功能或一些其他特性。例如,结构可以包括前表面、后表面、内表面以及外表面中的一个或多个。在另一示例中,密封形成结构可以包括接触面部的(例如,外部)表面和单独的不接触面部(例如,下侧或内部)表面。在另一示例中,结构可以包括第一表面和第二表面。
[0738]
为了有助于描述三维结构和表面的形状,首先考虑通过结构表面的一点p的截面,见图3b至图3f,它们图示了在表面上p点处的截面以及所得到的平面曲线示例。图3b至图3f还图示了p处的外向法向量。p处的向外法向向量指向远离表面的方向。在一些实例中,描述了从直立在表面上的想象的小人的观察点的表面。
[0739]
5.11.5.1一维中的曲率
[0740]
平面曲线在p处的曲率可以被描述为具有符号(例如,正、负) 和数量(例如,仅接触在p处的曲线的圆的半径的倒数)。
[0741]
正曲率:如果在p处的曲线转向向外法线,则在该点处的曲率将取为正的(如果想象的小人离开该点p,则它们必须向上坡走)。见图 3b(与图3c相比相对大的正曲率)和图3c(与图3b相比相对小的正曲率)。此类曲线通常被称为凹面。
[0742]
零曲率:如果在p处的曲线是直线,则曲率将取为零(如果想象的小人离开点p,则它们可以水平行走,不用向上或向下)。见图3d。
[0743]
负曲率:如果在p处的曲线远离向外法线转向,则在该点处在该方向中的曲率将取为负的(如果想象的小人离开该点p,则它们必须向下坡走)。见图3e(与图3f相比相对小的负曲率)和图3f(与图3e 相比相对大的负曲率)。此类曲线通常被称为凸面。
[0744]
5.11.5.2二维表面的曲率
[0745]
在根据本技术的二维表面上的给定点处的形状的描述可以包括多个法向横截面。多个横截面可以切割包括向外法线的平面(“法向平面”)中的表面,并且每个横截面可以在不同方向中截取。每个横截面产生具有相应曲率的平面曲线。在该点处的不同曲率可以具有相同的符号或不同的符号。在该点处的每个曲率具有数量,例如相对小的数量。在图3b至图3f中的平面曲线可以是在特定点处的此类多个横截面的示例。
[0746]
主曲率和主方向:其中曲线曲率取其最大值和最小值的法向平面的方向被称为主方向。在图3b至图3f的示例中,最大曲率出现在图 3b中,并且最小值出现在图3f中,因此图3b和图3f是主方向上的横截面。在p处的主曲率是在主方向上的曲率。
[0747]
表面的区域:在表面上的点的连通集。在区域中的该组点可以具有类似的特征,例
如曲率或符号。
[0748]
鞍状区域:其中在每个点处主曲率具有相反的符号,即一个符号是正并且另一个符号是负(根据想象的个人所转向的方向,它们可以向上或向下行走)的区域。
[0749]
圆顶区域:其中在每个点处主曲率具有相同的符号,例如两个正 (“凹面圆顶”)或两个负(“凸面圆顶”)的区域。
[0750]
圆柱形区域:其中一个主曲率是零(或者例如在制造公差内是零) 并且另一个主曲率不是零的区域。
[0751]
平面区域:其中两个主曲率均是零(或者例如在制造公差内是零) 的表面区域。
[0752]
表面的边缘:表面或区域的边界或界限。
[0753]
路径:在本技术的某些形式中,
‘
路径’将被认为意指数学-拓扑学意义上的路径,例如在表面上从f(0)至f(1)的连续空间曲线。在本技术的某些形式中,
‘
路径’可以被描述为路线或过程,包括例如表面上的一组点。(想象的个人的路径是其中它们在表面行走并且类似于花园路径的路径)。
[0754]
路径长度:在本技术的某些形式中,
‘
路径长度’将被认为是沿着表面从f(0)至f(1)的距离,即在表面上沿着路径的距离。在表面上的两个点之间可以存在超过一个路径并且此类路径可以具有不同的路径长度。(想象的个人的路径长度将是它们在表面上沿着路径行走的距离)。
[0755]
直线距离:直线距离是表面上两个点之间的距离,但是不考虑表面。在平面区域中,在表面上可以存在具有与表面上的两个点之间的直线距离相同的路径长度的路径。在非平面表面中,可以不存在具有与两个点之间的直线距离相同的路径长度的路径。(对于想象的个人,直线距离将对应于作为
‘
直线’的距离)。
[0756]
5.11.5.3空间曲线
[0757]
空间曲线:与平面曲线不同,空间曲线不必位于任何特定的平面中。空间曲线可以是闭合的,即,没有端点。空间曲线可以被认为是三维空间的一维片段。在dna螺旋的一条链上行走的假想人沿着空间曲线行走。典型的人左耳包括螺旋,其是左手螺旋。典型的人右耳包括螺旋,其为右手螺旋。结构的边缘,例如膜或叶轮的边缘,可以遵循空间曲线。通常,空间曲线可以由空间曲线上的每个点处的曲率和扭转来描述。扭矩是曲线如何从平面转出的量度。扭矩有符号和大小。空间曲线上一点处的扭转可以参考该点处的切线向量、法线向量和双法线向量来表征。
[0758]
正切单位向量(或单位正切向量):对于曲线上的每个点,该点处的向量指定从该点开始的方向以及幅度。正切单位向量是指向与该点处的曲线相同的方向的单位向量。如果假想的人沿曲线飞行并在特定点从其飞行器掉落,则切线向量的方向是她将行进的方向。
[0759]
单位法向量:当假想的人沿曲线移动时,这个正切向量本身改变。指向正切向量变化方向的单位向量称为单位主法线向量。它垂直于切线向量。
[0760]
双法线单位向量:双法线单位向量既垂直于切线向量又垂直于主法线向量。其方向可以由右手规则或可选地由左手规则来确定。
[0761]
密切平面:含有该单位正切向量和该单位主法线向量的平面。
[0762]
空间曲线的扭转:空间曲线的点处的扭转是该点处的双法线单位向量的变化率的
大小。它测量曲线偏离密切平面的程度。位于平面内的空间曲线具有零扭转。从接近平面偏离相对小的量的空间曲线将具有相对小的扭转量(例如,平缓倾斜的螺旋路径)。偏离密切平面相对较大的量的空间曲线将具有相对较大的扭转量(例如,急剧倾斜的螺旋路径)。
[0763]
参考右手规则,朝向右手侧双法线方向的空间曲线可以被认为具有右手正扭转。转向背离右手双法线方向的空间曲线可以被认为具有右手负扭转(例如,左手螺旋)。
[0764]
同样地,参考左手规则,朝向左手双法线方向的空间曲线可以被认为具有左手正扭转(例如,左手螺旋)。因此左手正等同于右手负。
[0765]
5.11.5.4孔
[0766]
表面可以具有一维孔,例如由平面曲线或由空间曲线界定的孔。具有孔的薄结构(例如,膜)可被描述为具有一维孔。如图3g所示的结构的以平面曲线为边界的表面中的一维孔。
[0767]
结构可以具有二维孔,例如由表面界定的孔。例如,充气轮胎具有由轮胎的内表面界定的二维孔。在另一示例中,具有用于空气或凝胶的空腔的囊可以具有二维孔。在又一个实例中,导管可以包括一维孔(例如在其入口处或在其出口处)和由导管的内表面界定的二维孔。还如图3i所示结构中由所示表面限定边界的二维孔。
[0768]
5.12其他备注
[0769]
除非上下文中明确说明并且提供数值范围的情况下,否则应当理解,在该范围的上限与下限之间的每个中间值,到下限单位的十分之一,以及在该范围内的任何其他该值或中间值均广泛地包含在本技术内。这些中间范围的上限和下限可独立地包括在中间范围内,也包括在本技术范围内,但受制于该范围内的任何明确排除的界限。在该范围包括该极限值中的一个或两个的情况下,本技术中还包括排除那些所包括的极限值中的任一个或两个的范围。
[0770]
此外,在本文该的一个值或多个值作为本技术的部分的一部分进行实施的情况下,应理解的是,此类值可以是近似的,除非另外说明,并且此类值可以实用的技术实施可允许或需要其的程度用于任何适当的有效数位。
[0771]
除非另有定义,本文所用的所有技术和科学术语具有与本实用新型所属领域的普通技术人员通常理解的相同的含义。尽管类似于或等效于本文所描述的那些的任何方法和材料也可以用于本技术的实践或测试,但是本文描述了有限数量的代表性方法和材料。
[0772]
当特定材料被鉴定用于构造部件时,具有类似特性的明显替代材料作为其替代物。此外,除非相反规定,否则本文该的任何和全部部件均被理解为能够被制造且因而可以一起或分开制造。
[0773]
必须指出,除非上下文明确地另外规定,否则如本文和所附权利要求所使用,单数形式“一”、“一个”和“该”包括其复数等同物。
[0774]
本文提及的全部出版物均以引用的形式整体并入本文,以公开并且描述作为那些出版物的主题的方法和/或材料。提供本文中讨论的公布仅仅是针对它们在本技术的提交日期之前的公开。本文中的任何内容均不应被理解为承认由于先前发明而使本技术无权享有这些公布的优先权。此外,所提供的出版日期可不同于实际出版日期,其可能需要单独证实。
[0775]
术语“包括(comprises)”和“包括(comprising)”应被理解为:是指各元件、各部件
或非排他方式的各步骤,指出可能存在或被利用的所标记的元件、部件或步骤,或者与没有标记的其他元件、部件或步骤的组合。
[0776]
在详细描述中使用的主题标题仅为了方便读者参考,不应用来限制可在本公开或权利要求书全文中找到的主题。主题标题不应用来解释权利要求书的范围或权利要求的限制。
[0777]
虽然在本文中已经参照了具体实施例来描述本技术,但应了解,这些实施例仅说明本技术的原理和应用。在一些情况下,术语和符号可以暗含实践本技术所不需要的具体细节。例如,尽管可以使用术语“第一”和“第二”,但是除非另有规定,否则它们并非旨在指示任何顺序,而是可以用来区分不同元件。此外,尽管可以一定顺序来描述或说明方法中的过程步骤,但是此顺序是不需要的。本领域技术人员将认识到,此顺序可以被修改,和/或顺序的其方面可以同时或甚至同步进行。
[0778]
因此应当了解可对该示例性实施例进行大量的调整,并且应当了解可在不脱离本技术的精神和范围的情况下设计其他布置。
[0779]
5.13参考符号列表
[0780]
[0781]
[0782]
[0783]
[0784]
[0785]
[0786]
[0787]
。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1