输送系统、人工耳蜗植入系统、控制方法及存储介质与流程
本发明涉及医疗器械,特别是涉及一种输送系统、人工耳蜗植入系统、控制方法及存储介质
背景技术:
1、人工耳蜗是一种植入式听觉辅助设备,包括体外装置部分和植入装置部分。体外装置部分由麦克风、语音处理器以及用于向植入装置部分发送指令的信号发射器组成。植入装置部分由信号接收及解码模块、电极阵列组成,电极阵列植入耳蜗之中,并将电极阵列分布于耳蜗内腔体的具有神经元分布的一侧,通过电极阵列的电极部件对耳蜗内功能尚完好的听觉神经施加信号刺激,使重度失聪的患者产生一定的声音知觉。具体的,电极阵列通电后,电极阵列中的电流由电压较高的正极电极处流出,向周围电压较低的区域流动。电流流经附近听觉神经元后将诱发听觉神经元产生电活动,从而促使患者产生听觉。
2、然而,在实际应用中,由于患者存在个体差异,不同患者的耳蜗内部形状存在差异,传统的人工耳蜗植入后的电极阵列与耳蜗贴合不紧密,使得电极阵列无法与耳蜗内壁直接接触,影响刺激效果,更甚至人工耳蜗会发生位移,导致电极阵列不在预定位置,则信号刺激的效果更差。基于此,具有支架的支架式人工耳蜗逐渐被开发出来,支架式人工耳蜗通过螺旋状支架对人工耳蜗进行支撑,从而保证人工耳蜗在植入后定位准确并且保证人工耳蜗的电极阵列与耳蜗贴合紧密。然而,针对支架式人工耳蜗尚无有效的植入手段,传统的人工耳蜗的植入手术多凭借医生经验进行,导致人工耳蜗的植入位置不精确,容易损伤蜗轴处纤毛,因此传统的人工耳蜗植入手段并不适用于支架式人工耳蜗的植入。
技术实现思路
1、基于此,有必要针对如何精确植入支架式人工耳蜗的问题,提供一种人工耳蜗植入系统以及输送系统。
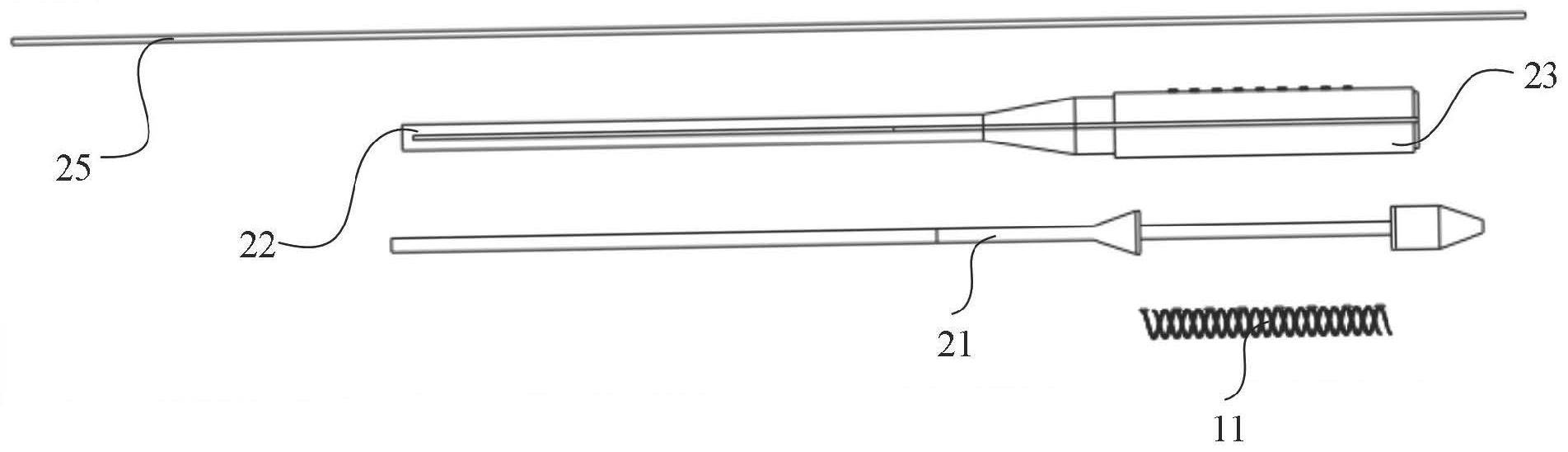
2、一方面,本技术提供一种输送系统,用于输送人工耳蜗的支架,包括:
3、支撑管;
4、鞘管,所述鞘管套设在所述支撑管外,所述鞘管与所述支撑管之间具有用于收纳所述支架的收纳空间,所述鞘管与所述支撑管被配置为可沿轴向相对移动以打开或关闭所述收纳空间;
5、球囊,所述球囊套设在所述鞘管外,所述球囊具有收缩状态以及膨胀状态,在所述膨胀状态下的所述球囊用于贴合耳蜗的内壁;以及,
6、刺激阵列,所述刺激阵列设置于所述球囊的外表面,所述刺激阵列用于向所述耳蜗发出刺激信号并用于采集所述耳蜗反馈的电信号。
7、上述输送系统通过在外设置可膨胀以及收缩的球囊,并在球囊表面设置了刺激阵列,通过刺激阵列向耳蜗内不同区域发出刺激信号并节省耳蜗反馈的电信号,从而能准确定位出耳蜗的听觉功能区,进而保证了输送系统释放支架后,支架上的电极阵列能准确贴合耳蜗内壁的听觉功能区,使得电极阵列能向听觉功能区内的听觉神经元发出刺激信号,进而使患者恢复一定的听力。
8、下面对本技术的技术方案作进一步的说明:
9、在其中一个实施例中,所述刺激阵列包括至少两个刺激单元,所有所述刺激单元沿所述鞘管的轴向方向间隔设置在所述球囊的外表面。
10、在其中一个实施例中,所述刺激单元包括电极和/或led。
11、在其中一个实施例中,所述支架上设置电极阵列;当所述支架置于所述收纳空间中时,所述刺激阵列的位置与所述支架的电极阵列的位置对应。
12、在其中一个实施例中,所述支撑管设有用于穿设导丝的导丝孔。
13、另一方面,本技术还提供一种人工耳蜗植入系统,包括:
14、医疗影像设备,用于获取患者的耳蜗三维模型;
15、数据处理模块,用于根据所述耳蜗三维模型输出与所述耳蜗三维模型相适配的人工耳蜗的型号;
16、上述的输送系统,用于在所述医疗影像设备的实时显影下,将所述人工耳蜗的支架输送至预定释放位置,并在所述预定释放位置释放所述支架后将所述支架展开至预定展开位置;所述输送系统的所述刺激阵列被配置为用于对所述耳蜗的内壁进行预刺激以定位所述耳蜗的听觉功能区。
17、在其中一个实施例中,所述数据处理模块被配置为能执行以下步骤:
18、在所述耳蜗三维模型中标记出所述支架的近端显影点以及远端显影点,并根据所述近端显影点以及所述远端显影点计算所述支架的中间显影点;
19、获取所述耳蜗的内腔在所述近端显影点、所述远端显影点以及所述中间显影点三个位置处的最大直径以及最小直径以输出所述支架的直径范围;
20、获取所述近端显影点与所述远端显影点之间的实际距离以输出述支架的长度;
21、根据所述耳蜗三维模型确定所述人工耳蜗的驱动器的合理放置位点,并根据所述合理放置位点的位置、所述近端显影点的位置以及所述耳蜗三维模型的蜗窗的位置输出所述人工耳蜗的连接线的长度;
22、根据所述支架的直径范围、所述支架的长度以及所述连接线的长度输出所述人工耳蜗的型号。
23、在其中一个实施例中,所述数据处理模块还被配置为能执行以下步骤:
24、依据所述人工耳蜗的型号,从数据库中获取对应型号且处于压握状态下的所述支架三维模型,将所述支架三维模型与所述耳蜗三维模型进行融合,获取处于压握状态下的所述支架三维模型上的各个显影点与所述耳蜗三维模型的空间位置关系,以输出所述预定释放位置;
25、从数据库中获取对应型号且处于展开状态下的所述支架三维模型,将所述支架三维模型与所述耳蜗三维模型进行融合,获取处于展开状态下的所述支架三维模型上的各个显影点与所述耳蜗三维模型的空间位置关系,以输出所述预定展开位置。
26、在其中一个实施例中,所述数据处理模块还被配置为用于根据所述人工耳蜗的型号输出导丝的型号以及所述输送系统的型号;并根据所述患者的耳蜗三维模型,输出所述导丝的预定植入位置;
27、所述输送系统还被配置为用于沿着所述导丝将所述支架输送至所述预定释放位置。
28、在其中一个实施例中,所述刺激阵列被配置为用于向所述耳蜗的内壁的不同区域发出刺激信号,并采集所述耳蜗反馈的电信号以定位所述听觉功能区。
29、在其中一个实施例中,还包括用于驱动所述输送系统的执行模块,所述执行模块被配置为能执行以下步骤:
30、驱动所述输送系统将所述支架输送至所述预定释放位置;
31、驱动所述支撑管与所述鞘管沿轴向相对移动以将所述支架部分释放;
32、通过所述医疗影像设备实时观察所述支架的展开过程;
33、若部分展开的所述支架未能展开至所述预定展开位置和/或若部分展开的所述支架的所述电极阵列未能朝向所述听觉功能区,则将所述支架收回所述输送系统;
34、调整所述输送系统的位置后再次将所述支架部分释放,直至部分展开的所述支架能展开至所述预定展开位置并且所述支架的所述电极阵列朝向所述听觉功能区;
35、将所述支架完全释放,使所述支架自由展开至所述预定展开位置。
36、在其中一个实施例中,在所述支架被完全释放后,所述执行模块还被配置为能执行以下步骤:
37、使所述球囊收缩至所述收缩状态,驱动所述输送系统使所述球囊伸入展开后的所述支架内;
38、使所述球囊膨胀至所述膨胀状态,使所述球囊支撑所述支架,以使得所述支架完全展开并贴合所述耳蜗的内腔壁。
39、另一方面,本技术还提供一种人工耳蜗植入的控制方法,用于控制上述人工耳蜗植入系统,包括以下步骤:
40、获取患者的耳蜗三维模型;
41、根据所述耳蜗三维模型输出与所述耳蜗三维模型相适配的人工耳蜗的型号;
42、通过输送系统将所述人工耳蜗的支架输送至预定释放位置;
43、对所述耳蜗的内壁进行预刺激以定位所述耳蜗的听觉功能区;
44、在所述预定释放位置释放所述支架,并使所述支架展开至预定展开位置后所述支架的电极阵列朝向所述听觉功能区。
45、在其中一个实施例中,根据权利要求14所述的人工耳蜗植入的控制方法,其特征在于,在根据所述耳蜗三维模型输出与所述耳蜗三维模型相适配的人工耳蜗的型号的步骤中包括以下步骤:
46、在所述耳蜗三维模型中标记出所述支架的近端显影点以及远端显影点,并根据所述近端显影点以及所述远端显影点计算所述支架的中间显影点;
47、获取所述耳蜗的内腔在所述近端显影点、所述远端显影点以及所述中间显影点三个位置处的最大直径以及最小直径以输出所述支架的直径范围;
48、获取所述近端显影点与所述远端显影点之间的实际距离以输出述支架的长度;
49、根据所述耳蜗三维模型确定所述人工耳蜗的驱动器的合理放置位点,并根据所述合理放置位点的位置、所述近端显影点的位置以及所述耳蜗三维模型的蜗窗的位置输出所述人工耳蜗的连接线的长度;
50、根据所述支架的直径范围、所述支架的长度以及所述连接线的长度输出所述人工耳蜗的型号。
51、在其中一个实施例中,还包括以下步骤:
52、根据所述人工耳蜗的型号,将数据库中对应型号的所述人工耳蜗的支架三维模型与所述耳蜗三维模型进行融合,并输出所述预定释放位置和所述预定展开位置。
53、在其中一个实施例中,还包括以下步骤:
54、依据所述人工耳蜗的型号,从数据库中获取对应型号且处于压握状态下的所述支架三维模型,将所述支架三维模型与所述耳蜗三维模型进行融合,获取处于压握状态下的所述支架三维模型上的各个显影点与所述耳蜗三维模型的空间位置关系,以输出所述预定释放位置;
55、从数据库中获取对应型号且处于展开状态下的所述支架三维模型,将所述支架三维模型与所述耳蜗三维模型进行融合,获取处于展开状态下的所述支架三维模型上的各个显影点与所述耳蜗三维模型的空间位置关系,以输出所述预定展开位置。
56、在其中一个实施例中,还包括以下步骤:
57、根据所述人工耳蜗的型号输出导丝的型号以及所述输送系统的型号;并根据所述患者的耳蜗三维模型,输出所述导丝的预定植入位置;
58、控制所述输送系统沿着所述导丝将所述支架输送至所述预定释放位置。
59、在其中一个实施例中,对所述耳蜗的内壁进行预刺激以定位所述耳蜗的听觉功能区的步骤包括:
60、向所述耳蜗的内壁的不同区域发出刺激信号,并采集所述耳蜗反馈的电信号以定位所述听觉功能区。
61、在其中一个实施例中,在所述预定释放位置释放所述支架,并使所述支架展开至预定展开位置后所述支架的电极阵列朝向所述听觉功能区的步骤包括:
62、实时观察所述支架的展开过程;
63、若部分展开的所述支架未能展开至所述预定展开位置和/或若部分展开的所述支架的所述电极阵列未能朝向所述听觉功能区,则将所述支架收回所述输送系统;
64、调整所述输送系统的位置后再次将所述支架部分释放,直至部分展开的所述支架能展开至所述预定展开位置并且所述支架的所述电极阵列朝向所述听觉功能区;
65、将所述支架完全释放,使所述支架自由展开至所述预定展开位置。
66、在其中一个实施例中,在所述支架被完全释放后,还包括以下步骤:
67、使所述输送机构的球囊收缩至收缩状态,驱动所述输送系统使所述球囊伸入展开后的所述支架内;
68、使所述球囊膨胀至所述膨胀状态,使所述球囊支撑所述支架,以使得所述支架完全展开并贴合所述耳蜗的内腔壁。
69、另一方面本技术还提供一种存储介质,所述存储介质包括存储的程序,其中,所述程序能执行上述所述的人工耳蜗植入的控制方法。
70、上述人工耳蜗植入系统、人工耳蜗植入的控制方法及存储介质解决了支架式人工耳蜗没有配套植入手段的问题,并且通过在术前重建患者的耳蜗三维模型,根据患者的耳蜗三维模型的尺寸参数选择适配的人工耳蜗的型号,保证了人工耳蜗在植入后与患者耳蜗相适配。并且通过在术前将数据库中的人工耳蜗的三维模型与患者的耳蜗三维模型进行融合,可确定支架式人工耳蜗的电极在释放时的位点和展开后支架的最终形态,以直观展示,从而为后续的手术提供可视化导航。同时在植入手术过程中,通过医疗影像设备实时显示支架的位置以及形态,保证了支架的释放位置以及展开位置的精确性,避免损伤蜗轴处纤毛。同时在释放支架前,先通过输送系统的刺激阵列对人工耳蜗进行预刺激,从而准确定位出患者耳蜗的听觉功能区,进而保证释放后的支架上的电极阵列能准确贴合耳蜗的听觉功能区,进而保证人工耳蜗恢复患者听觉的功能效果。
- 还没有人留言评论。精彩留言会获得点赞!