一种改进型消毒机器人的制作方法
1.本发明涉及智能机器人技术领域,具体涉及一种改进型消毒机器人。
背景技术:
2.传统医疗机构消毒方式主要通过人工喷洒消毒液来进行消毒灭菌,需要耗费大量的人力和时间,工作效率低,且很容易因人为因素造成消毒的盲区及死角,影响消毒效果。为解决人工喷洒消毒液存在的上述问题,近年来,人们开发设计了消毒机器人应用于医疗机构以提高消毒效率和消毒效果。
3.随着科技的不断进步,消毒机器人的应用也越来越广泛,消毒机器人可以将自身携带的消毒液喷向消毒区域,从而无需人员进入消毒区域。现有的消毒机器人,虽可按既定路线自动行走,但当线路上遇到障碍物时,不能有效避让,往往需要人工协助处理;且当消毒区域各处的空间层高低不一时,其对消毒液的雾化消毒杀菌的效果明显降低,现有的消毒机器人喷洒范围小,喷雾方向固定,喷雾装置高低不能调节,降低了消毒杀菌的范围,同时大多消毒机器人外设电连接刹车系统,如遇消毒机器人行至斜坡断电,此时刹车系统失联,消毒机器人的安全性有待改善。
技术实现要素:
4.针对现有技术存在的上述不足,本发明提供一种改进型消毒机器人。
5.本发明采用如下技术方案:
6.一种改进型消毒机器人,包括驱动底座,所述驱动底座上连接有机器人本体,所述机器人本体设置有壳体,所述壳体依次连接有底盘、中间隔板、封盖,所述壳体与所述底盘、中间隔板之间形成第一空腔,所述第一空腔内设置有雾化装置,所述壳体与所述中间隔板、封盖之间形成第二空腔,所述第二空腔内设置有出雾装置,所述出雾装置与所述雾化装置之间连通设置,所述出雾装置可升降设置,所述出雾装置贯穿伸出所述封盖设置,所述出雾装置远离所述机器人本体连接有出雾喷头;
7.所述雾化装置设置有雾化器,所述雾化器上连接有储液箱,所述储液箱设置中空体,所述雾化装置内连接有液位传感器,所述出雾装置设置有出雾管道,所述出雾管道双层设置,所述外层出雾管道底部连接有升降架,所述升降架固定在所述中间隔板上,并与所述出雾管道平行设置;
8.所述驱动底座设置有底板,所述底板上设置有一对驱动件,所述驱动件相对安装在所述底板的两侧,所述驱动件连接有驱动轮,所述驱动轮可转动的安装在所述驱动件上,所述驱动件与所述驱动轮之间连接有减震装置,所述驱动底座还设置有转向轮,所述转向轮与所述驱动轮垂直设置,所述转向轮设置轮毂电机驱动;
9.所述壳体一侧壁依次设置有交互屏、展示屏、人体感应模块、液位灯。
10.进一步的,所述封盖上连接有灯罩,所述灯罩嵌入所述封盖设置,所述灯罩上设置有若干通光窗口,所述灯罩内设置有环形卡槽,所述环形卡槽内设置有灯带,所述灯带与所
述液位传感器电连接。
11.进一步的,所述储液箱上设置有加液口,所述加液口连接有加液管,所述加液管远离所述加液口的一端连接所述壳体,所述壳体对应连接注口,所述注口连接有加注盖。
12.进一步的,所述液位灯与所述液位传感器电连接,所述液位传感器设置高、中、低三档,对应的所述液位灯设置有三种灯光模式。
13.进一步的,所述雾化器设置有浮子开关、雾化片、出风口,所述出风口下端对应设置有风扇,所述浮子开关对应所述储液箱下端设置有出水口。
14.进一步的,所述雾化片对称设置有4组,所述中空体设置为锥体,所述锥体上端开口小于下端开口,所述锥体下端开口直径覆盖4组所述雾化片。
15.进一步的,所述驱动件设置为无刷电机,所述底板上还设置有可更换电池组、电路板,所述驱动底座一侧设置充电口,所述充电口连接充电座。
16.本发明的有益效果:
17.1、本发明所述改进型消毒机器人实现驱动轮实时减速刹车,安全性能高,驱动轮套接设置减振装置,减振稳定,效果好;
18.2、机器人本体内设置上下双腔结构,雾化装置设置下腔体内,出雾装置设置上腔体内,能够降低下毒机器人的重心,从而保证消毒机器人的结构稳定性;
19.3、雾化片出雾通过储液箱中空锥体,及风扇通过出风口加快雾气向上延伸,出雾装置可伸缩连接出雾喷头,可依据消毒场所的需要自由切换喷雾高度,保证消毒效果;
20.4、设置人体感应模块有效避让障碍物及行人,设置液位传感器电连接灯罩内设置的灯带及机器人本体侧面设置的液位灯,实时反馈消毒液液面情况,保障消毒效率;
21.5、本发明所述消毒机器人搭载驱动底盘,具有自主规划、自主导航功能、自主充电模式,无需人工干预,智能化程度高,可替代人工对目标区域进行消毒。
附图说明
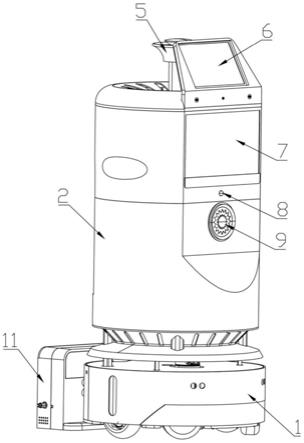
22.图1为本发明所述一种改进型消毒机器人结构示意图;
23.图2为本发明所述机器人本体结构示意图;
24.图3为本发明所述雾化装置、出雾装置结构示意图;
25.图4为本发明所述雾化装置、出雾装置半剖视图;
26.图5为本发明所述灯罩结构示意图;
27.图6为本发明所述驱动底盘结构示意图。
28.图中:1驱动底座,101底板,102驱动件,103驱动轮,104减震装置,105转向轮,106可更换电池组,107电路板,2机器人本体,201壳体,202底盘,203中间隔板,204封盖,205灯罩,2051环形卡槽,3雾化装置,301雾化器,302储液箱,3021加液口,4出雾装置,401出雾管道,402升降架,5出雾喷头,6交互屏,7展示屏,8人体感应模块,9液位灯,10加注盖,11充电座。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
31.如图1-4所示,一种改进型消毒机器人,包括驱动底座1,所述驱动底座1上连接有机器人本体2,所述机器人本体2设置有壳体201,所述壳体201依次连接有底盘202、中间隔板203、封盖204,所述壳体201与所述底盘202、中间隔板203之间形成第一空腔,所述第一空腔内设置有雾化装置3,所述壳体201与所述中间隔板203、封盖204之间形成第二空腔,所述第二空腔内设置有出雾装置4,所述出雾装置4与所述雾化装置3之间连通设置,所述出雾装置4可升降设置,所述出雾装置4贯穿伸出所述封盖204设置,所述出雾装置4远离所述机器人本体2连接有出雾喷头5;
32.所述雾化装置3设置有雾化器301,所述雾化器301上连接有储液箱302,所述储液箱302设置中空体,所述雾化器301形成的雾气经中空体输送至出雾装置4再经出雾喷头5向外散出,所述雾化装置3内连接有液位传感器,所述出雾装置4设置有出雾管道401,所述出雾管道401双层设置,所述外层出雾管道401底部连接有升降架402,所述升降架402固定在所述中间隔板203上,并与所述出雾管道401平行设置;
33.如图6所示,所述驱动底座1设置有底板101,所述底板101上设置有一对驱动件102,所述驱动件102相对安装在所述底板101的两侧,所述驱动件102连接有驱动轮103,所述驱动轮103可转动的安装在所述驱动件102上,所述驱动件102与所述驱动轮103之间连接有减震装置104,所述驱动底座1还设置有转向轮105,所述转向轮105与所述驱动轮103垂直设置,所述转向轮105设置轮毂电机驱动;
34.所述壳体201一侧壁依次设置有交互屏6、展示屏7、人体感应模块8、液位灯9。
35.在实际应用中,如图5所示,所述封盖204上连接有灯罩205,所述灯罩205嵌入所述封盖204设置,所述灯罩205上设置有若干通光窗口,所述灯罩205内设置有环形卡槽2051,所述环形卡槽2051内设置有灯带,所述灯带与所述液位传感器电连接,雾化装置3内有液灯带显示蓝色,雾化装置3内无液灯带显示红色。
36.在实际应用中,所述储液箱302上设置有加液口3021,所述加液口3021连接有加液管,所述加液管远离所述加液口3021的一端连接所述壳体201,所述壳体201对应连接注口,所述注口连接有加注盖10。
37.在实际应用中,所述液位灯9与所述液位传感器电连接,所述液位传感器设置高、中、低三档,对应的所述液位灯9设置有三种灯光模式。
38.在实际应用中,所述雾化器301设置有浮子开关、雾化片、出风口,所述出风口下端
对应设置有风扇,所述浮子开关对应所述储液箱302下端设置有出水口。
39.在实际应用中,所述雾化片对称设置有4组,加大雾气的排出量,所述中空体设置为锥体,所述锥体上端开口小于下端开口,所述锥体下端开口直径覆盖4组所述雾化片。
40.在实际应用中,所述驱动件102设置为无刷电机,所述底板101上还设置有可更换电池组106、电路板107,所述驱动底座1一侧设置充电口,所述充电口连接充电座11,实现自主充电。
41.工作原理:
42.本发明所述改进型消毒机器人,设置驱动底盘1,所述驱动底盘1设置无刷电机带动驱动轮103,同时设置转向轮105辅助驱动轮103实现消毒机器人转向,无刷电机自带减速比,实现驱动轮103实时减速刹车,安全性能高,无刷电机与驱动轮103之间连接有减振装置104,减振稳定,效果好;
43.所述机器人本体2内设置第一、第二空腔,所述第一、第二空腔分别设置支撑柱连接,所述第一空腔内设置雾化装置3,所述第二空腔内设置出雾装置4,能够降低下毒机器人的重心,从而保证消毒机器人的结构稳定性,所述雾化装置3设置雾化器301上端连接有储液箱302,雾化器301设置4组雾化片,且储液箱302设置中空锥体,伴随风扇通过出风口加快雾气向上延伸,出雾装置4可伸缩连接出雾喷头5,可依据消毒场所的需要自由切换喷雾高度,保证消毒效果;
44.设置人体感应模块8有效避让障碍物及行人,设置液位传感器电连接灯罩205内设置的灯带及机器人本体2侧面设置的液位灯9,实时反馈消毒液液面情况,保障消毒效率。
45.综上所述:本发明所述改进型消毒机器人搭载驱动底盘,具有自主规划、自主导航功能、自主充电模式,无需人工干预,智能化程度高,可替代人工对目标区域进行消毒,消毒效果好。
46.以上显示和描述了本发明的基本原理、主要特征及优点,文中使用的前、后、左、右非特指,主要为了更直观说明技术方案,不起限定作用,本行业的技术人员应该了解,上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1