末端执行器、手术器械及手术机器人的制作方法
1.本实用新型涉及机器人辅助手术技术领域,特别涉及一种末端执行器、手术器械及手术机器人。
背景技术:
2.腹腔镜手术特别是机器人辅助手术中,切开组织与缝合是二种不同的操作,操作时需要多次更换器械,即在剪刀和持针器间不断地切换,尤其是机器人辅助手术器械的更换非常麻烦,从而常导致手术中断,给病人和医生都带来不适,当处理如nvb(血管神经丛)等重要结构时需要精准的操作,频繁的切换手术器械会影响手术时间和结果。对于一些精细手术环境复杂的手术,如手术机器人辅助的保留功能的前列腺癌根治术中,为尽可能保留勃起神经和血管,需要冷刀切开并进行精细缝合,从而保证达到尽可能保留如nvb(血管神经丛)优良的组织。而现有技术中的手术器械常难以满足需求。
技术实现要素:
3.本实用新型的目的在于提供一种末端执行器、手术器械及手术机器人,以解决现有末端执行器难以兼顾剪切和持针的问题。
4.为解决上述技术问题,根据本实用新型的第一个方面,提供了一种末端执行器,用于手术器械,所述末端执行器包括:相对布置的两个执行体;
5.两个所述执行体围绕第一轴线相对可转动地开合设置,形成垂直于所述第一轴线的开合基面;其中,每个所述执行体自远端向近端包括剪切区与夹持区;所述剪切区呈弧形,所述剪切区的弧形朝向所述开合基面的一侧弯曲。
6.可选的,所述夹持区亦呈弧形,所述夹持区的弧形朝向与所述剪切区的弧形朝向相同。
7.可选的,所述剪切区具有切割面,所述切割面与所述开合基面成角度布置。
8.可选的,所述切割面与所述开合基面之间的角度范围为1
°
~10
°
。
9.可选的,所述切割面的刃边包括第一段与第二段,所述第一段为直线形或弧线形,所述第二段为弧线形,所述第二段与所述第一段的近端连接。
10.可选的,所述第一段为直线形,所述第一段与所述执行体的轴向成角度布置,一个所述执行体的第一段自远端向近端向逐渐靠近另一执行体的方向延伸。
11.可选的,所述夹持区的径向宽度大于所述剪切区的径向宽度。
12.可选的,所述夹持区具有夹合面,当所述执行体闭合时,两个所述执行体的夹合面用于相互靠近或相互抵靠。
13.可选的,所述夹合面为滚花面。
14.可选的,所述夹合面远端的滚花密度小于所述夹合面近端的滚花密度。
15.可选的,所述执行体还包括断线区,所述断线区位于所述夹持区的近端。
16.为解决上述技术问题,根据本实用新型的第二个方面,还提供了一种手术器械,其
包括传动组件以及如上所述的末端执行器;
17.所述传动组件与所述末端执行器连接,至少用于驱动所述末端执行器的两个所述执行体开合运动。
18.可选的,所述手术器械还包括位于所述末端执行器近端的摆动关节,所述摆动关节用于围绕与第一轴线相垂直的第二轴线转动,所述传动组件还用于驱动所述末端执行器围绕所述第二轴线转动。
19.为解决上述技术问题,根据本实用新型的第三个方面,还提供了一种手术机器人,其包括工具臂,所述工具臂的末端用于挂载或连接如上所述的手术器械。
20.综上所述,在本实用新型提供的末端执行器、手术器械及手术机器人中,所述末端执行器包括:相对布置的两个执行体;两个所述执行体围绕第一轴线相对可转动地开合设置,形成垂直于所述第一轴线的开合基面;其中,每个所述执行体自远端向近端包括剪切区与夹持区;所述剪切区呈弧形,所述剪切区的弧形朝向所述开合基面的一侧弯曲。
21.如此配置,末端执行器通过两个执行体的剪切区可实现冷剪精细切割,其中剪切区呈弧形,适应于剪切组织的需求;通过两个执行体的夹持区可实现强力持针功能。进一步的,在手术器械的传动组件的配合驱动下,可以实现精细缝合。
附图说明
22.本领域的普通技术人员将会理解,提供的附图用于更好地理解本实用新型,而不对本实用新型的范围构成任何限定。其中:
23.图1是本实用新型一实施例的手术机器人系统的手术场景的示意图;
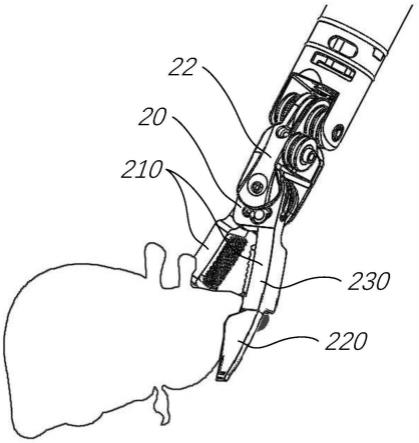
24.图2是本实用新型一实施例的手术器械的示意图;
25.图3a~图3c是本实用新型一实施例的末端执行器的不同状态的示意图;
26.图4是本实用新型一实施例的末端执行器的用于剪切的使用示意图;
27.图5a~图5f是本实用新型一实施例的末端执行器的用于持针的使用示意图;
28.图6是本实用新型一实施例的末端执行器的侧视图;
29.图7是本实用新型一实施例的末端执行器的俯视图;
30.图8是本实用新型一实施例的剪切区的示意图;
31.图9是本实用新型一实施例的剪切区的侧视图;
32.图10a和图10b是本实用新型一实施例的末端执行器的开合示意图;
33.图11是本实用新型一实施例的末端执行器的用于夹持不同大小针线的使用示意图;
34.图12是本实用新型一实施例的断线区的示意图;
35.图13是本实用新型一实施例的断线区的俯视图;
36.图14是本实用新型一实施例的夹合面上的滚花面示意图。
37.附图中:
38.1-患者端机器人;11-立柱;12-支撑机构;13-工具臂;15-病床;
39.2-手术器械;20-末端执行器;21-传动组件;22-摆动关节;210-执行体;220-剪切区;221-切割面;222-第一段;223-第二段;230-夹持区;231-夹合面;240-断线区。
具体实施方式
40.为使本实用新型的目的、优点和特征更加清楚,以下结合附图和具体实施例对本实用新型作进一步详细说明。需说明的是,附图均采用非常简化的形式且未按比例绘制,仅用以方便、明晰地辅助说明本实用新型实施例的目的。此外,附图所展示的结构往往是实际结构的一部分。特别的,各附图需要展示的侧重点不同,有时会采用不同的比例。
41.如在本说明书中所使用的,单数形式“一”、“一个”以及“该”包括复数对象,术语“或”通常是以包括“和/或”的含义而进行使用的,术语“若干”通常是以包括“至少一个”的含义而进行使用的,术语“至少两个”通常是以包括“两个或两个以上”的含义而进行使用的,此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括一个或者至少两个该特征,术语“近端”通常是靠近操作者的一端,术语“远端”通常是靠近患者即靠近病灶的一端,“一端”与“另一端”以及“近端”与“远端”通常是指相对应的两部分,其不仅包括端点,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。此外,如在本说明书中所使用的,一元件设置于另一元件,通常仅表示两元件之间存在连接、耦合、配合或传动关系,且两元件之间可以是直接的或通过中间元件间接的连接、耦合、配合或传动,而不能理解为指示或暗示两元件之间的空间位置关系,即一元件可以在另一元件的内部、外部、上方、下方或一侧等任意方位,除非内容另外明确指出外。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本说明书中的具体含义。
42.本实用新型的目的在于提供一种末端执行器、手术器械及手术机器人,以解决现有末端执行器难以兼顾剪切和持针的问题。
43.以下参考附图进行描述。
44.请参考图1至图14,其中,图1是本实用新型一实施例的手术机器人系统的手术场景的示意图;图2是本实用新型一实施例的手术器械的示意图;图3a~图3c是本实用新型一实施例的末端执行器的不同状态的示意图;图4是本实用新型一实施例的末端执行器的用于剪切的使用示意图;图5a~图5f是本实用新型一实施例的末端执行器的用于持针的使用示意图;图6是本实用新型一实施例的末端执行器的侧视图;图7是本实用新型一实施例的末端执行器的俯视图;图8是本实用新型一实施例的剪切区的示意图;图9是本实用新型一实施例的剪切区的侧视图;图10a和图10b是本实用新型一实施例的末端执行器的开合示意图;图11是本实用新型一实施例的末端执行器的用于夹持不同大小针线的使用示意图;图12是本实用新型一实施例的断线区的示意图;图13是本实用新型一实施例的断线区的俯视图;图14是本实用新型一实施例的夹合面上的滚花面示意图。
45.图1示出了一种手术机器人系统及其手术应用场景,在一个示范性的实施例中,所述手术机器人系统为主从式遥操作手术机器人,即所述手术机器人系统包括执行端和控制端,其中,控制端包括医生控制台(未图示),执行端包括患者端机器人1,患者端机器人1包括立柱11、支撑机构12和工具臂13,手术器械2挂载或者连接于工具臂13上。手术机器人系统主要操作原理是:医生通过医生控制台远程操作实现对病床15上的患者进行微创伤手术治疗。
46.基于上述手术机器人系统,本实用新型一实施例提供一种手术器械2,请参考图2,所述手术器械2包括传动组件21和末端执行器20,所述传动组件21与所述末端执行器20传动连接,如通过传动丝等实现连接。传动组件21可以驱动末端执行器20进行相应的手术操作。如背景技术所述,现有的手术器械2中,其末端执行器20的功能较为单一,如仅可执行夹、切、剪等操作中的一种。为解决现有末端执行器难以兼顾剪切和持针的问题,本实施例提供一种末端执行器20,其包括:相对布置的两个执行体210;两个所述执行体210围绕第一轴线a1相对可转动地开合设置,形成垂直于所述第一轴线a1的开合基面;其中,所述执行体210自远端向近端包括剪切区220与夹持区230;所述剪切区220呈弧形,所述剪切区220的弧形朝向所述开合基面的一侧弯曲。如此配置,末端执行器20通过两个执行体210的剪切区220可实现冷剪精细切割,其中剪切区220呈弧形,适应于剪切组织的需求;通过两个执行体210的夹持区230可实现强力持针功能。
47.需要说明的,这里的开合基面,是指垂直于第一轴线a1的一个虚拟平面,其位于两个执行体210近端的端部之间。而剪切区220的弧形朝向开合基面的一侧弯曲是指,剪切区220的弧形的弯曲方向是沿着开合基面的法向的。更具体的,请参考图6和图7,图6示出了末端执行器20的侧视图,在图6中,开合基面o平行于纸面方向,剪切区220的弧形朝向垂直于纸面方向弯曲,因此在图6的侧视图中所观察到的剪切区220的投影并不显示出弯曲。而在图7中,开合基面o垂直于纸面方向,剪切区220的弧形沿着纸面方向弯曲,可与图7中观察到剪切区220的弯曲形态。
48.请参考图4,在本实施例中,由于剪切区220用于剪切组织,剪切过程中需要锋利的切面和闭合的加速度,因此将剪切区220布置在执行体210的远端。
49.进一步的,在手术器械2的传动组件21的配合驱动下,可以实现精细缝合。传动组件21至少可以驱动末端执行器20的两个执行体210开合运动,如图3a至图3c所示,其中图3c示出了两个执行体210闭合至预定的闭合位置时的状态。在一些实施例中,传动组件21还可以驱动末端执行器20沿开合基面的延伸方向俯仰运动,如图3a所示;或者传动组件21还可以驱动末端执行器20围绕第一轴线a1或平行于第一轴线a1的方向偏摆运动,如图3b所示。在一个可替代的实施例中,所述手术器械2还包括位于所述末端执行器20近端的摆动关节22,所述摆动关节22用于围绕与第一轴线a1相垂直的第二轴线a2转动,所述传动组件21还用于驱动所述末端执行器20围绕所述第二轴线a2转动,以实现偏摆运动。通过传动组件21驱动末端执行器20俯仰运动或偏摆运动,结合末端执行器20的强力持针功能,可以实现精细缝合。本领域技术人员可根据现有技术,配置传动组件21的动力以及与驱动末端执行器20之间的传动结构等,传动结构例如可以是公开号cn109009414a的中国专利申请所公开的传动结构,该专利的全部内容通过引用并入本文,在此对传动结构的结构不作赘述。当然本领域技术人员也可以选用其它的传动结构,本实用新型对此不限。
50.请继续参考图7,优选的,所述夹持区230亦呈弧形,所述夹持区230的弧形朝向与所述剪切区220的弧形朝向相同。如果单纯的将剪切区220与夹持区230叠加,在使用夹持区230夹持针线时,容易导致剪切区220触碰人体组织导致意外,所以将剪切区220与夹持区230均设置为弧形,有利于缩小末端执行器在垂直于第一轴线方向的距离,避免了触碰人体组织的概率,同时还可以增加夹持区230的工作面积。在一些实施例中,夹持区230的曲率半径和剪切区220的曲率半径相同,在一些实施例中,剪切区220的曲率半径小于所述夹持区
的曲率半径。在一个较佳的实施例中,执行体210整体呈圆弧设计,执行体210的弯曲半径可定制范围更大,在复杂的手术环境中,更有利于医生操作。此外,请参考图5d至图5f,由于执行体210整体呈圆弧设计,有利于夹持区230在不同角度的持针时,避免被剪切区220所干涉,更方便手术医生的操作。
51.请参考图5a至图7,由于夹持区230位于剪切区220的近端,夹持区230的径向宽度(指沿垂直于开合基面的方向,沿所述执行体210之径向的延伸宽度)大于所述剪切区220的径向宽度。例如,夹持区230的径向宽度可以是两个执行体210的剪切区220的径向宽度总和。即,夹持区230相对剪切区220而言在第一轴线方向隆起,相较于普通的持针钳,可用范围更大并且更安全。比如,针对平躺的针线,本实施例提供的末端执行器20可以用较为平滑的侧面夹起,而非尖锐的器械顶端,从而预防了夹起过程中对组织的创伤,同时由于夹持区230的径向宽度大,相对增加了与缝合针的接触面积,更方便夹持。此外,如此设置,还增加了医生在缝针过程中的视野。
52.请参考图8,结合图9至图10b,进一步的,所述剪切区220具有切割面221,所述切割面221与所述开合基面o成角度布置。在图8中,开合基面o垂直于纸面方向,而切割面221与该开合基面o成角度θ,使得两个执行体210的切割面221以斜面相切合,从而可以提升切割的吻合性,使切割功能更加稳定。优选的,请参考图10a和图10b,两个所述执行体210的切割面221的切合为过盈过渡设计,从两个切割面221的近端至远端,过盈量逐渐增大,保证开合过程中,剪切力的稳定输出,也保证从持针到弧剪的过渡过程不出现卡顿现象。优选的,角度θ的范围在1
°
~10
°
之间。
53.请参考图6和图9,优选的,切割面221具有刃边,所述刃边是指该切割面221用于与另一执行体210的切割面221相切合的边。所述切割面221的刃边包括第一段222与第二段223。所述第一段222可以为直线形或者为弧线形,所述第二段223为弧线形。靠近近端的第二段223处的切割面221可完成厚组织的切割,远离近端的第一段的切割面221区域可以完成更细组织的游离切割。在一个优选的实施例中,刃边包括直线形的第一段222与第二段223,所述直线形的第一段222与所述执行体210的轴向成角度布置,一个所述执行体210的直线状的第一段222自远端向近端向逐渐靠近另一执行体210的方向延伸。两个执行体210的第一段222部分大致呈v形,开口朝向远端。而第一段222的近端与第二段223连接,可以使开合过程中的剪切点匀速伸展,并增加结构上的稳定;同时,也大幅度扩大了剪切过程的开合角度,使剪切功能运行过程中,持针钳功能不完全闭合,两个功能相对独立。
54.请参考图11和图12,每个所述执行体210的所述夹持区230具有夹合面231。当所述执行体210闭合时,两个所述夹合面231用于相互靠近或相互抵靠。在一个较佳的实施例中,两个执行体210的夹合面231相向布置,即布置在夹持区230相对的侧面上。当两个执行体210闭合至预定的闭合位置时,两个执行体210的夹合面231相互抵靠或相互平行,以便于对针线进行夹持。优选的,所述夹合面231为滚花面。由于两个执行体210的开合是围绕第一轴线a1转动而实现的,两个夹合面231的闭合也是围绕于第一轴线a1相互靠近,可以理解的,在两个执行体210未闭合至预定的闭合位置前,两个夹合面231的远端之间的距离较大,近端之间的距离较小,两个夹合面231大致呈v形,由此,两个夹合面231的远端可以夹持直径较大的针线,而两个夹合面231的远端可以夹持直径较小的针线。请参考图14,基于此,所述滚花面自远端向近端的滚花密度优选不同,例如夹合面231远端的滚花密度小于夹合面231
近端的滚花密度,以适应夹持不同直径的针线。
55.优选的,请参考图12,所述执行体210还包括断线区240,所述断线区240位于所述夹持区230的近端。断线区240优选为直剪结构,用于剪断缝合线。断线区240用于剪线,需要较强的闭合力来实现该功能,因此将断线区240布置在执行体210的近端,基于杠杆原理,可以获得较大的闭合力。进一步,如图13所示,所述断线区240的厚度从近端到远端逐渐变厚,即两个执行体210的断线区240的相对侧面逐渐靠拢。如此,所述断线区240的斜面方式设计,有利于形成斜面切合,提升切割的温和性,切割功能更加稳定。
56.基于上述手术器械2,本实施例还提供一种手术机器人,其包括工具臂13,所述工具臂13的末端用于挂载或连接如上所述的手术器械2。本实施例对手术机器人的其它部件和结构不作特别的限定和说明,本领域技术人员可根据现有技术对其进行配置。
57.综上所述,在本实用新型提供的末端执行器、手术器械及手术机器人中,所述末端执行器包括:相对布置的两个执行体;两个所述执行体围绕第一轴线相对可转动地开合设置,形成垂直于所述第一轴线的开合基面;其中,每个所述执行体自远端向近端包括剪切区与夹持区;所述剪切区呈弧形,所述剪切区的弧形朝向所述开合基面的一侧弯曲。如此配置,末端执行器通过两个执行体的剪切区可实现冷剪精细切割,其中剪切区呈弧形,适应于剪切组织的需求;通过两个执行体的夹持区可实现强力持针功能。进一步的,在手术器械的传动组件的配合驱动下,可以实现精细缝合。
58.上述描述仅是对本实用新型较佳实施例的描述,并非对本实用新型范围的任何限定,本实用新型领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1