导管及医疗器械监测系统的制作方法
导管及医疗器械监测系统
1.优先权
2.本技术要求2020年2月28日提交的美国临时申请第62/983,396 号的优先权,该申请通过引用整体并入本技术。
技术领域
3.本技术涉及医疗器械领域,更具体地涉及导管及医疗器械监测系统。
背景技术:
4.过去,医疗器械(例如导丝和导管)的特定脉管内引导已经使用荧光检查方法来跟踪医疗器械的放置。然而,这种荧光检查方法使患者和他们的临床医生暴露于有害的x射线辐射。此外,在一些情况下,患者暴露于荧光检查方法所需的潜在有害的造影剂。
5.近来,电磁跟踪系统已经越来越多地用于医疗应用。尽管电磁跟踪系统在跟踪导管时避免了视距依赖,但这些系统易于由于电磁场干扰而导致间歇性故障。更具体地,由于电磁跟踪系统依赖于场发生器产生的磁场的测量,这些系统易于受到来自蜂窝电话、平板电脑、膝上型电脑和其他发射电磁波的消费电子设备的电磁场干扰。结果,电磁跟踪系统经受更频繁的信号丢失,并被限定到有限的深度范围以用于信号获取。
6.本文公开了一种具有光纤形状感测能力的导管及其操作方法,其不会遭受与如上的电磁跟踪系统相关联的缺点。
技术实现要素:
7.简要概括地,在此公开的实施例涉及一种导管,其以长形集成管道、隔板(或间隔件)以及形成在隔板(或间隔件)的表面与集成管道的壁(下文称作“管道壁”)的内表面之间的多个腔为特征。在隔板内和管道壁内(或沿着管道壁)形成多个微腔,以保持相应的多个(光) 芯纤维。根据本技术的一个实施例,芯纤维中的每个可以构成单个芯光栅光纤,即单个光传输介质,例如具有一个或多个传感器的玻璃或塑料的柱形元件。或者,根据本技术的另一个实施例,芯纤维中的每个可以构成具有传感器的多个(两个或更多个)缠绕的传输介质。
8.更具体地,导管的一个实施例包括至少一个隔板,隔板跨越集成管道的直径并且纵向地延续以细分由集成管道形成的开口以产生两个腔。如下所述,隔板可与上述多个微腔中的第一微腔一起制造,其中通过在集成管道的截面中心处或附近定位在隔板的中间部分内,第一微腔与集成管道的中心轴线同轴。第一微腔的尺寸被确定为保持芯纤维(以下有时称作“中心芯纤维”),其中第一微腔的直径的尺寸可以被确定为超过中心芯纤维的直径。代替单个隔板,导管可以包括相对于截面中心径向延伸到管道壁的两个或更多个隔板。而且,如果第一微腔与中心轴线同轴地定位,则可以通过由集成管道的突出部分代替隔板或在其他布置中保持第一微腔。
9.管道壁包括一个或多个微腔,例如第二多个微腔,第二多个微腔是上述多个微腔
的子集。根据本技术的一个实施例,第二多个微腔中的每个可以沿着管道壁的圆周定位在距集成管道的截面中心相同的已知半径处。例如第二多个微腔可以横向对齐(例如平行于中心轴线定向)并且沿着管道壁的外圆周轴向定位,以保持相应的多个芯纤维 (以下称作“外芯纤维”)。或者,如下文详细描述的,第二多个微腔可以与在管道壁内共挤制的外芯纤维横向对齐和定位。
10.根据本技术的一个实施例,第二多个微腔的尺寸被确定成用于保持对应的多个芯纤维(以下称作“外芯纤维”),其中第二多个微腔中的每个的直径也可以被确定成大于外芯纤维的直径以提供“游隙 (play)”并且将芯纤维与施加到导管表面的力隔离开,但芯纤维不会经受这种情况。这种隔离可以提供更准确的成形感测确定作为芯纤维所经受的(机械)应变的测量,可以允许医疗器械监测系统以更高的精度识别导管、特别是导管的集成管道的形状或形式的改变。
11.根据本技术的一个实施例,当部署为单芯光栅光纤时,芯纤维包括沿其长度至少在集成管道的近端和远端之间空间分布的多个传感器。这些分布的传感器可以配置为反射光栅的阵列并且被定位在芯纤维的不同区域处,以使得能够在整个长度或集成管道的选定部分上进行分布式测量。这些分布式测量可以是从具有不同光谱宽度(例如特定波长或特定波长范围)的反射光获得的信号特性。反射光特性的一个示例可以包括由应变(例如轴向应变或其他类型的机械应变)导致的反射光的波长偏移。
12.根据本技术的一个实施例,每个传感器可以构成反射光栅,例如光纤布拉格光栅(fbg),即对应于记录到芯纤维中的永久的周期性的折射率改变的本征传感器。换句话说,传感器作为具有特定光谱宽度(例如特定波长或特定波长范围)的光反射镜工作。结果,当宽带入射光由光学光源提供并传播通过特定的芯纤维时,在到达用于芯纤维的分布式传感器阵列的第一传感器时,与第一传感器相关联的具有规定光谱宽度的光被反射回控制台内的光接收器,控制台包括显示器和光学光源。入射光的剩余光谱继续传播通过芯纤维朝向集成管道的远端。入射光的剩余光谱可遇到来自分布式传感器阵列的其他传感器,其中这些传感器中的每一者制造成反射具有不同特定光谱宽度的光以提供分布式测量,如上文所描述。
13.在操作期间,多个光反射(也称作“反射光信号”)从位于形成于导管内的相应多个微腔内的多个芯纤维中的每个返回到控制台。每个反射光信号可以唯一地与不同的光谱宽度相关联。与反射光信号相关联的信息可用于确定患者体内导管的一部分(例如尖端、管道部分等) 或导管整体的物理状态(例如形状长度、形状、形式和/或定向)的三维表示(下文也称作“导管的物理状态”)。在此,外芯纤维沿着管道壁的圆周空间上分离并且每个外芯纤维配置成单独地返回从在芯纤维中的每个中制造的分布式传感器阵列反射的具有不同光谱宽度(例如特定光波长或光波长范围)的光。检测到的来自外芯纤维的反射光的波长的偏移与作为参考操作的来自中心芯纤维的反射光的波长偏移的比较可用于确定导管的物理状态。
14.更具体地,在脉管系统插入期间,临床医生可以依靠控制台来可视化导管的当前物理状态(例如形状、定向等)以避免可能的路径偏差,可能的路径偏差由导管定向的改变(例如集成管道的角度定向的改变等)导致。当外芯纤维位于沿着管道壁的圆周在不同位置处横向对齐的第二多个微腔内时,导管的集成管道的角度定向的改变(弯曲) 将不同类型
(例如压缩或拉伸)和程度的应变施加在外芯纤维中的每个以及中心芯纤维上。不同类型和/或程度的应变可导致芯纤维的传感器施加不同的波长偏移,波长偏移可被测量以外推导管的物理状态。
15.根据以下描述和所附权利要求,本发明的实施例的这些和其他特征将变得更加清楚,或者可以通过如下文阐述的本发明的实施例的实践来了解。
附图说明
16.将通过参考在附图中示出的本技术的具体实施例来呈现本技术的更具体的描述。应当理解,这些附图仅描绘了本发明的典型实施例,因此不应被认为是对其范围的限制。通过使用附图,将更具体和详细地描述和解释本发明的示范性实施例,在附图中:
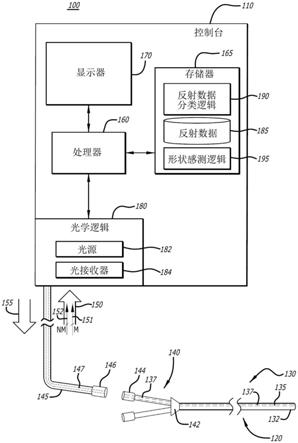
17.图1是包括具有光学形状感测能力的医疗器械的医疗器械监测系统的说明性实施例;
18.图2是在将导管插入患者和操作期间图1的医疗器械监测系统的示例性实施例;
19.图3a是图1-2的导管的说明性实施例。
20.图3b是在图3a所示的导管的集成管道中的微腔和芯纤维(corefiber)部署的说明性实施例。
21.图4a是图3a-3b的导管的第一说明性实施例的透视图,导管包括集成管道、沿直径设置的隔板,以及形成在管道和隔板内的微腔;
22.图4b是包括安装在微腔内的芯纤维的图4a的导管的第一说明性实施例的透视图;
23.图5是图3a-3b的导管的第二说明性实施例的透视图,导管包括集成管道、沿直径设置的隔板、沿径向设置的隔板,以及形成在管道和隔板内的微腔;和
24.图6a-6b是由图1的医疗器械监测系统进行的用于实现光学三维形状感测的操作方法的流程图。
具体实施方式
25.现在将参考附图,其中相同的结构将具有相同的参考标记。应当理解,附图是本发明的示例性实施例的图解和示意性表示,并且既不是限制性的,也不必按比例绘制。
26.关于本文使用的术语,应当理解,这些术语是为了描述一些特定实施例,并且这些术语不限制本文提供的概念的范围。序数(例如第一、第二、第三等)通常用于区分或标识不同的部件或操作,并且不提供序号或数字限制。例如“第一”、“第二”和“第三”部件或操作不必按顺序出现,并且包括这样的部件或操作的特定实施例不必限于这三个部件或操作。类似地,诸如“左”、“右”、“顶”、“底”、“前”、“后”等标签是为了方便而使用的,并且不旨在暗示例如任何特定的固定位置、定向或方向。相反,这样的标记用于反映例如相对位置、定向或方向。除非上下文另有明确规定,否则单数形式的“某个(a)”、“某个 (an)”和“该(the)”包括复数指代。
27.在以下描述中,本文所用的术语“或”和“和/或”应解释为包括性的或意指任何一个或任何组合。作为实例,“a、b或c”或“a、b和/或 c”意指“以下中的任一种:a;b;c;a和b;a和c;b和c;a、 b和c”。定义的例外仅在元件、部件、功能、步骤或动作的组合以某种方式固有地相互排斥时发生。
28.术语“逻辑”表示配置成执行一个或多个功能的硬件和/或软件。作为硬件,逻辑可以包括具有数据处理和/或存储功能的电路。这种电路的示例可以包括但不限于处理器、可编程门阵列、微控制器、专用集成电路、组合电路等。可替换地,或者与上述硬件电路相结合,逻辑可以是一个或多个软件模块形式的软件,其可以配置为作为其对应电路来操作。软件模块可以包括例如可执行应用、守护程序应用(daemonapplication)、应用编程接口(api)、子例程、函数、过程、例程、源代码或者甚至一个或多个指令。软件模块可以存储在任何类型的合适的非瞬态存储介质中,诸如可编程电路、半导体存储器、诸如易失性存储器的非持久性存储装置(例如任何类型的随机存取存储器“ram”)、诸如非易失性存储器的持久性存储装置(例如只读存储器“rom”、功率备份ram、闪存、相变存储器等)、固态驱动器、硬盘驱动器、光盘驱动器或便携式存储装置。
29.为清楚起见,应理解,词语“近侧”是指相对更靠近使用本文将要描述的装置的临床医生的方向,而词语“远侧”是指相对更远离临床医生的方向。在此,本文公开的导管的集成管道的“近侧部分”例如包括当在患者上使用导管时旨在靠近临床医生的导管管道的一部分。同样地,导管管道的“近端”例如包括在使用导管时旨在靠近临床医生的端部。导管管道的近侧部分可以包括导管管道的近端;然而,导管管道的近侧部分不需要包括导管管道的近端。
30.类似地,导管的集成管道的“远侧部分”包括导管管道的当导管用于患者时旨在靠近患者或在患者内的部分。同样地,导管管道的“远端”包括当导管在使用中时导管管道的旨在靠近患者或在患者中的端部。导管管道的远端部分可以包括导管管道的远端;然而,导管管道的远端部分不需要包括导管管道的远端。此外,本文(包括权利要求书)中使用的词语“包括”、“具有(has)”和“具有(having)”应具有与词语“包括(comprising)”相同的含义。
31.除非另外定义,否则本文使用的所有技术和科学术语具有与本领域普通技术人员通常理解的相同的含义。
32.参照图1,示出了医疗器械监测系统100的示例性实施例。在此,医疗器械监测系统100以控制台110和通信地耦接到控制台110的医疗器械120为特征。对于该实施例,医疗器械120对应于导管,导管的特征在于具有在集成管道130的近端130和远端132之间延伸的两个或更多个腔135的集成管道130。集成管道130(有时称作“导管管道”)经由分叉毂142与一个或多个延伸支脚140连通。基于光学的导管连接器144可以包括在至少一个延伸支脚140的近端上,以使导管120能够经由互连145或另一合适的部件可操作地连接到控制台 110。在此,互连145可以包括连接器146,当连接器146耦接到基于光学的导管连接器144时,连接器146在作为互连145的一部分而包括的一个或多个光纤147(下文中称作“光纤”)与部署在导管120内并集成到管道130中的芯纤维137之间建立光学连接性。或者,可以使用包括一个或多个适配器的连接器的不同组合来将光纤147光学连接到导管120内的芯纤维137。
33.控制台110的示例性实现包括处理器160、存储器165、显示器 170和光学逻辑180,但是可以理解,控制台110可以采用各种形式中的一种。包括处理器160以在访问存储器165(例如非易失性存储器)时在操作期间控制控制台110的功能。如图所示,显示器170可以是集成到控制台110中的液晶二极管(lcd)显示器,并且用作用户接口以向临床医生显示信息,特别是在导管放置过程(例如心脏导管插入术)期间更是如此。在另一个实施例中,显示器170可以与控制台110分开。对于这两个实施例,由显示器170呈现的内容可以构成根据返
回到控制台110的反射光信号150的特性计算出的导管120 的物理状态(例如导管120或导管120的一部分的长度、形状、形式和/或定向)的二维(2-d)或三维(3-d)表示。根据本公开的一个实施例,反射光信号150可相关于如下所述的从光学逻辑180传输并由光学逻辑180提供的宽带入射光155的各种离散部分(例如特定光谱宽度)。
34.仍然参考图1,光学逻辑180配置为基于从导管120接收的反射光信号150的特性来支持导管120、特别是导管120的集成管道130 的图形呈现。这些特性可以包括由集成在集成管道130的壁内(或沿着集成管道130的壁)的芯纤维137的某些区域上的应变导致的波长的偏移,其可以用于确定(通过波长的偏移的计算或外推)导管120、特别是其集成管道130或集成管道130的一部分(例如管道130的尖端或远端)的物理状态,以读取尖端(或远端)的波动(实时移动)。
35.更具体地,光学逻辑180包括光源182。光源182配置为传输宽带入射光155以在包括在互连145中的光纤147上传播,互连145光学连接到导管管道130内的多个芯纤维137。在一个实施例中,光源 182是可调谐扫频激光器,不过除了激光器之外还可以采用其他合适的光源,包括半相干光源、led光源等。
36.根据本技术的一个实施例,光学逻辑180还包括光接收器184(例如光电检测器,诸如正-本征-负“pin”光电二极管、雪崩光电二极管等)。在此,光接收器184配置成:(i)接收返回的光信号,即从基于光纤的反射光栅(传感器)接收的反射光信号150,反射光栅(传感器)制造在部署在导管120内的芯纤维137中的每个内(参见图3b),以及(ii)将反射光信号150转化成反射数据185,即表示反射光信号的电信号形式的数据,包括由应变导致的波长偏移。如下所述,与不同光谱宽度相关联的反射光信号150包括从定位在导管120的中心芯纤维(参考)中的传感器提供的反射光信号151和从定位在导管120 的外芯纤维中的传感器提供的反射光信号152。
37.如图所示,光源182和光接收器184都可操作地连接到控制它们的操作的处理器160。此外,光接收器184可操作地耦接以将反射数据185提供到存储器165,以供反射数据分类逻辑190存储和处理。反射数据分类逻辑190可以配置成(i)识别哪些芯纤维相关于所接收的反射数据185中的哪一个,以及(ii)将相关于导管120的类似区域和/或光谱宽度的反射光信号150提供的反射数据185分离成分析组。每个分析组的反射数据可供形状感测逻辑195用于分析。
38.根据本技术的一个实施例,形状感测逻辑195配置为将在导管的相同测量区域(或相同光谱宽度)处部署在每个外芯纤维中的传感器所测量的波长偏移与沿中心轴线定位并作为弯曲的中性轴线操作的中心芯纤维处的波长偏移进行比较。根据这些分析,形状感测逻辑190 可以确定芯纤维在3-d空间中所采用的形状,并且可以进一步确定导管120在3-d空间中的当前物理状态以在显示器170上呈现。
39.根据本技术的一个实施例,形状感测逻辑195可以基于试探法或运行时(run-time)分析来生成导管120、特别是集成管道130的当前物理状态的呈现。例如形状感测逻辑195可以根据机器学习技术配置成访问具有与导管120的不同区域有关的预先存储的数据(例如图像等)的数据存储器(库),其中芯纤维137经受相似或相同的波长偏移。根据预先存储的数据,可以呈现导管120的当前物理状态。或者,作为另一个示例,形状感测逻辑195可以配置成用于在运行期间至少基于(i)由芯纤维经受的所产生的波长偏移以及(ii)由沿导
管120 的相同截面面积处的不同外芯纤维定位的传感器产生的这些波长偏移与由相同截面面积处的中心芯纤维的传感器产生的波长偏移之间的关系来确定导管120的每个区域、特别是管道130的物理状态的改变。可以设想,可以执行其他处理和过程,以利用由沿着芯纤维137 中的每个的传感器测量的波长偏移,从而在导管120的物理状态中产生适当的改变。
40.现在参考图2,示出了导管120的实施例,该实施例示出了导管 120通过皮肤插入部位210插入患者200的脉管系统。在此,导管120 通常包括集成管道130,集成管道130具有通常保持在患者200外部的近侧部分220和通常在放置完成之后位于患者脉管系统内的远侧部分230。(集成的)导管管道130可以前进到患者脉管系统内的期望位置,例如导管管道130的远端(或尖端)235靠近患者心脏,例如在上腔静脉(svc)的下三分之一(1/3)部分中。对于该实施例,可以在导管管道130的远端235处放置各种器械,以测量某个心室和血管中的血压、观察血管的内部等。
41.在前进通过患者脉管系统期间,导管管道130经由互连145内的光纤147从控制台110接收宽带入射光155,其中入射光155传播到导管管道130内的芯纤维137。根据本技术的一个实施例,端接(terminating)光纤147的互连145的连接器146可以耦接到基于光学的导管连接器144,基于光学的导管连接器144可以配置为端接部署在导管120内的芯纤维137。这种耦接将导管120的芯纤维137与互连145内的光纤147光学连接。需要光学连接性以将入射光155传播到芯纤维137并通过互连145将反射光信号150返回到控制台110 内的光学逻辑180。如下面详细描述的,导管120的物理状态可以基于反射光信号150的波长偏移的分析来确定。
42.参照图3a,示出了图1-2的导管120的说明性实施例。在此,导管120包括集成管道130和至少一个隔板310,隔板310延伸跨过管道130的直径“d”并定位在导管管道130的远端235。隔板310帮助在形成管道130的壁300的内表面305和从远端235朝向导管120的分叉毂142纵向延伸的隔板310的表面之间在管道130内形成多个腔 320。多个微腔330
1-330n(n≥3)确定尺寸为具有小于多个腔320(例如图4a的腔400和410)中的任一个的直径,可以共同地形成在隔板310内并且沿着导管管道130的圆周,例如形成在集成管道130自身的壁300中(例如一个或多个微腔、例如微腔330
2-3304制造成位于壁300的内表面305和外表面307之间)或作为形成在壁300的内表面305或外表面307上的纵向珠(longitudinal bead)。这些微腔 330
1-330n配置成保持对应的多个芯纤维340
1-340n,如图3b所示。
43.更具体地,如图3a-3b所示,导管120包括至少一个横跨管道130 的直径“d”并且纵向地延续以细分由管道130形成的开口350以产生腔320的隔板(例如隔板310)。隔板310可以在挤制(extrusion) 期间制造为导管120的一部分,或者可以在制造期间制造为单独的部件并插入导管的管道中。作为可选的实施例,导管120可以构造成隔板310不分割开口350的情况,因为壁300的部分可以突出到由导管的远端(在开口350处的区域)占据的截面空间中,或者壁300的部分可以突出到由导管的远端(开口350处的区域)所占据的截面空间中,其中在壁300的突出部分内形成中心微腔3001以维持一个或多个芯纤维。
44.如下所述,隔板310用上述多个微腔330
1-330n中的第一微腔3301制造,其中通过在集成管道130的截面中心365处或附近将第一微腔 3301定位在隔板310的中间部分内,第一微腔3301与集成管道130 的中心轴线360同轴。截面中心365是从面向集成管道130的远端
235 的截面面积的角度来看的中心位置。在此,第一微腔3301配置为保持单芯纤维3401(以下称作“中心芯纤维”)。沿着集成管道130的圆周 370定位作为多个微腔330
1-330n的子集的第二多个微腔330
2-330n。微腔330
2-330n保持相应的芯纤维340
2-340n(以下称作“外芯纤维”)。根据本技术的一个实施例,如图所示,一个或多个外芯纤维(例如第二多个芯纤维340
2-340n)位于沿着集成管道130的圆周370的不同象限,如图4b所示。
45.如图3b所示,每个芯纤维340i(1≤i≤n)包括至少在导管管道130 的近端和远端之间沿其长度空间分布的传感器阵列 380
i1-380
im
(1≤i≤n;m≥2)。每个传感器380
i1-380
im
可以定位在沿着芯纤维340i的指定长度分布的不同测量区域385
1-385m处,以试图感测发生在这些光纤区域385
1-385m处的应变,特别是在导管120在患者脉管系统内前进期间更是如此。分布长度可以是静态的或可变的。
46.更具体地,传感器380
i1-380
im
(i=1
…
n,如图3b所示)中的每个配置为反射不同光谱宽度(例如特定波长或特定波长范围)处的光,其中相邻传感器(例如传感器380
i1-380
i2
、传感器380
i2-380
i3
等)可以被布置为反射具有非重叠光谱宽度的光。然而,响应于芯纤维3402 (i=2)在光纤区域385
1-385m中的任何一个(例如光纤区域3851)处经受应变,传感器380
21
也经受应变,应变导致传感器380
21
改变反射光信号的特性以表示感测的应变。结果,总体上,由传感器380
i1-380
im
沿每个芯纤维340
1-340n返回的反射光信号可以被控制台110用来恢复反射数据以用于确定芯纤维340
1-340n的当前3-d形状。根据芯纤维340
1-340n的当前3-d形状,可以确定导管120的当前3-d形状以用于后续绘制。
47.为了便于讨论,将讨论选定的芯纤维3402的操作和部署在芯纤维3402上的传感器380
21-380
2m
的操作。其他芯纤维3401、3403…
和/或 340n可以以类似或相同的方式配置。
48.根据本技术的一个实施例,每个传感器380
21-380
2m
可以配置为光纤布拉格光栅(fbg),即内接在芯纤维3402中的对应于永久的周期性的折射率改变的本征传感器(intrinsic sensor)。换句话说,每个传感器380
21
…
和380
2m
作为不同的特定光谱宽度的光反射镜工作。结果,当宽带入射光155由光学光源提供并传播通过芯纤维3402时,在到达位于芯纤维3402的第一区域3851处的第一传感器380
21
时,具有针对第一传感器380
21
选择的光谱宽度的光152被反射回控制台110 内的光学接收器184(参见图1)。基于在第一区域3851处的芯纤维 3402上感测的应变(例如压缩或拉伸)的类型和程度,第一传感器380
21
改变反射光信号152的特性。改变的特性可对应于经受与应变类型(例如压缩或拉伸)和应变程度相关的波长偏移的反射光信号152。入射光155的剩余光谱157继续通过芯纤维3402向导管管道130的远端 235传播。入射光155的剩余光谱157可能遇到另一个传感器380
22
…
或380
2m
,其中这些传感器380
22
…
或380
2m
中的每个被制造为反射具有不同特定光谱宽度的光。类似地,具有不同光谱宽度的反射光信号从芯纤维3402返回。
49.作为说明性示例,其中导管120的特定区域正在经受角度定向的改变(例如导管管道130弯曲),第二外芯纤维3402的位于第一测量区域3851处的部分可以经受拉伸(正应变;施加力以增加长度)。结果,在接收到入射光155时,位于第一区域3851处的传感器380
21
将以升高的衰减(例如反射光信号152的频率高于入射光155的频率) 返回反射光152。因此,施加到第二外芯纤维3402的拉伸导致反射光波长的偏移(增加),并且波长偏移量与施加到第二外芯纤维3402的拉伸的量相关。
50.类似地,当导管的特定区域经受角度定向的改变时,也位于第一测量区域3851中
的第四外芯纤维3404的一部分可经受压缩(负应变;施加力以缩短长度)。结果,在接收到入射光155时,位于第一区域3851处的传感器380
41
将以减小的衰减(例如反射光信号152的频率低于入射光155的频率)返回反射光152。因此,施加到第四外芯纤维3404的拉伸导致反射光波长的偏移(减小),并且在反射光信号 152上传导的波长偏移量与施加到第四外芯纤维3404的压缩量相关。
51.鉴于上述情况,给定它们在空间上分离的微腔330
1-330n内的纵向位置,不同的应变不同地影响多个芯纤维340
1-340n。沿着用于每个芯纤维340
1-340n的分布式传感器阵列的不同传感器所遇到的波长偏移的程度可以共同地标识施加在多个芯纤维的每个区域上的应变的类型(例如压缩、拉伸)和量。因此,对应于不同光谱宽度的多个反射光信号可以为控制台110内的形状感测逻辑195提供3-d形状感测信息,以确定如何操纵导管120的每个监测区域,多个反射光信号由位于芯纤维的长度上的选定区域处的分布式传感器阵列产生。结果,导管120的当前物理状态可以基于从芯纤维提供的波长偏移的分析来确定并在控制台110的显示器165上以三维(3-d)呈现,如上所述。
52.现在参考图4a,示出了图3a-3b的导管120的集成管道130的第一示例性实施例的透视图。在此,导管120包括集成管道130、沿直径设置的隔板310和多个微腔330
1-3304,对于该实施例,这些微腔被制造成位于集成管道130的壁300内和隔板310内。特别地,隔板 310将由管道130的壁300的内表面305形成的单个腔分成多个腔,即如图所示的两个腔400和410。在此,第一腔400形成在形成管道 130的壁300的内表面305的第一弧形部分420与在管道130内纵向延伸的隔板310的第一外表面430之间。第二腔410形成在形成管道 130的壁300的内表面305的第二弧形部分440与隔板310的第二外表面435之间。
53.根据本发明的一个实施例,两个腔400和410具有大致相同的体积。然而,隔板310不必将管道130分成两个相等的腔。例如代替从管道130的面向前的截面透视图竖直延伸(12点钟至6点钟)的隔板 310,隔板310可以水平(3点钟至9点钟)、对角地(1点钟至7点钟;10点钟至4点钟)或成角度地(2点钟至10点钟)延伸。在后一种配置中,管道130的腔400和410中的每个将具有不同的体积。
54.相对于多个微腔330
1-3304,第一微腔3301在管道130的截面中心 365处或附近制造在隔板310内。对于该实施例,三个微腔330
2-3304被制造成位于管道130的壁300内。特别地,在管道310的壁300内,即在壁300的第一弧形部分420的内表面305和外表面307之间制造第二微腔3302。类似地,第三微腔3303也制造在管道310的壁300 内,即在壁300的第二弧形部分430的内表面和外表面305/307之间。第四微腔3304也制造在与隔板310对齐的壁300的内表面和外表面 305/307内。
55.根据本技术的一个实施例,如图4a所示,这些微腔330
2-3304是根据从面向前方的截面透视图来看的“左上”(10点钟)、“右上
”ꢀ
(2点钟)和“底部”(6点钟)布局来定位的。当然,微腔330
2-3304可以不同地定位,只要这些微腔330
2-3304沿着管道130的圆周370 在空间上是分开的以便确保在安装时来自外芯纤维340
2-3404的反射光信号的更牢固的收集。例如两个或更多个微腔(例如微腔3302和 3304)可以沿着导管壁300的圆周370定位在不同的象限处。
56.现在参见图4b,示出了图4a的导管120的集成管道130的第一说明性实施例的透视图,其中芯纤维340
1-3404被安装在微腔 330
1-3304内。根据本技术的一个实施例,第二多个
微腔330
2-3304的尺寸被确定成保持对应的外芯纤维340
2-3404,其中第二多个微腔 330
2-3304中的每个的直径可以被确定成其尺寸刚好大于外芯纤维 340
2-3404的直径。例如单芯纤维的直径与微腔330
1-3304中的任一个的直径之间的尺寸差异可以在0.001微米(μm)与1000μm之间的范围内。结果,外芯纤维340
2-3404的截面面积将小于相应的微腔 330
2-3304的截面积。“较大的”微腔(例如微腔3302)可以更好地将施加到外芯纤维3402的外部应变与直接施加到管道130自身的应变隔离。类似地,第一微腔3301的尺寸可以被确定为保持中央芯纤维3401,其中第一微腔3301的直径的尺寸可以刚好大于中央芯纤维3401的直径。
57.作为本技术的一个替代性实施例,微腔330
1-3304中的一个或多个的尺寸可以被定成具有超过对应的一个或多个芯纤维340
1-3404的直径的直径。然而,微腔330
1-3304中的至少一个的尺寸被设定为固定地保持其对应的芯纤维(例如在其横向表面与其对应的微腔的内壁表面之间没有间隔地保持的芯纤维)。作为本技术的又另一个替代性实施例,所有这些微腔330
1-3304的尺寸被确定成具有的直径是固定地保持芯纤维340
1-3404的。
58.参见图5,示出了图3a-3b的导管120的第二说明性实施例的透视图。导管120包括集成管道130和沿直径设置的隔板500以及从集成管道130的截面中心365延伸的径向设置的隔板510。三个腔520、 522和524中的每个至少部分地由隔板500进一步限定。两个腔522 和524中的每个腔甚至进一步至少部分地由隔板510限定。如图所示,隔板500将管道130内的内部空间分成第一组半圆形腔,包括第一腔 520。隔板510进一步将第一组半圆形腔中的一个腔分成腔522和524。因此,第二腔522可以配置成具有与第三腔524大致相同的体积,并且第一腔520可以配置成具有至少两倍于第二腔522和第三腔524的体积,只要腔520、522、524的纵向长度是相等的。
59.如图5进一步所示,多个微腔330
1-3304被制造成位于集成管道 130的壁300内和隔板500内。与图4a类似,第一微腔3301在集成管道130的截面中心365处或附近制造在隔板500的中间部分530内。三个微腔330
2-3304被制造成位于集成管道130的壁300内。具体地,在管道310的壁300内,即在限定第一腔520的壁300的内表面305 与外表面307之间制造第二微腔3302。类似地,第三微腔3303也制造在管道310的壁300内,例如在壁300的内表面305和外表面307 之间的另一面积内。从截面中心365在径向方向上延伸的第三微腔 3303从第二微腔3302偏移大约九十度(90
°
)或更多径向度。第四微腔3304可以制造在壁300的内表面305和外表面307内,其中第四微腔3304与隔板510对齐。或者,第四微腔3304可以被制造在隔板510 内,其比截面中心365基本上更靠近壁300的内表面305。
60.根据本技术的这个具体实施例,微腔330
2-3304根据从面向前的截面透视图来看的“右下”(4点钟)、“左下”(8点钟)和“顶部
”ꢀ
(12点钟)布局来定位。当然,微腔330
2-3304可以被不同地定位,只要这些微腔330
2-3304沿着管道130的圆周370在空间上分离以便确保在安装时来自这些外芯纤维340
2-3404的反射光信号的更牢固的收集。例如如图所示,至少两个不同的微腔(例如微腔3302和3303) 可以沿着导管壁300的圆周370定位在不同的象限处。
61.现在参见图6a-6b,示出了由图1的医疗器械监测系统的部件进行的用于实现光学三维形状感测的操作方法的流程图。在此,导管包括跨越管道壁的直径并且纵向地延续以细分管道壁的至少一个隔板。隔板的中间部分制造有第一微腔,其中第一微腔与导管管道的中心轴线同轴。第一微腔配置成保持中央芯纤维。除了第一微腔之外的两个或更多微腔定位在沿导管管道的壁周向(circumferentially)间隔开的不同位置处。例如第二多个微
腔中的两个或更多个可以定位在沿着导管壁的圆周的不同象限处。
62.此外,每个芯纤维包括沿其长度在至少导管管道的近端和远端之间空间分布的多个传感器。传感器阵列被分布到芯纤维的不同区域处的位置传感器,以使得能够在导管管道的选定部分或整个长度上进行应变的分布式测量。分布式测量可以通过具有不同光谱宽度(例如特定波长或特定波长范围)的反射光来传送,反射光基于应变的类型和程度而经受特定的波长偏移。
63.根据本技术的一个实施例,如图6a所示,对于每个芯纤维,提供宽带入射光以传播通过特定的芯纤维(框600)。除非光被排放,否则在入射光到达测量特定芯纤维上的应变的分布式传感器阵列的传感器时,与第一传感器相关联的规定光谱宽度的光将被反射回控制台内的光接收器(框605-610)。在此,传感器改变反射光信号的特性以识别由第一传感器测量的特定纤芯纤维上的应变的类型和程度 (框615-620)。根据本技术的一个实施例,反射光信号的特性的改变可以表示反射光信号的波长相对于与规定光谱宽度相关联的入射光信号的波长的改变(偏移)。传感器通过芯纤维返回反射光信号,并且入射光的剩余光谱继续通过芯纤维朝向导管管道的远端传播(框 625-630)。入射光的剩余光谱可遇到分布式传感器阵列的其他传感器,其中这些传感器中的每一者将如框605-630中所陈述而操作,直到分布式传感器阵列的最后传感器返回与其指派的光谱宽度相关联的反射光信号且剩余光谱作为照明而排放为止。
64.现在参考图6b,在操作过程中,多个反射光信号从位于导管内形成的相应多个微腔内的多个芯纤维中的每个返回到控制台。具体地,光接收器从位于中心芯纤维和外部芯纤维上的分布式传感器阵列接收反射光信号,并将反射光信号转化为反射数据,即包括由应变导致的波长偏移的反射光信号所表示的电信号(框650-655)。反射数据分类逻辑配置成识别哪些芯纤维属于哪些反射数据,并且将属于特定测量区域(或类似的光谱宽度)的反射光信号提供的反射数据分离成分析组(框660-665)。
65.将反射数据的每个分析组提供给用于分析的形状感测逻辑(框 670)。在此,形状感测逻辑将每个外芯纤维处的波长偏移与沿中心轴线定位并作为弯曲的中性轴线操作的中心芯纤维处的波长偏移进行比较(框675)。根据分析,对于所有分析组(例如来自所有或大部分芯纤维中的传感器的反射光信号),形状感测逻辑可以确定芯纤维在三维空间中所具有的形状,由此形状感测逻辑可以确定导管在三维空间中的当前物理状态(框680-685)。
66.在不脱离本技术的精神的情况下,本发明的实施例可以以其他具体形式实施。所描述的实施例被认为在所有方面仅仅是说明性的,而不是限制性的。例如代替将微腔放置在集成管道的壁内,可以沿着占据腔的一部分的壁的内表面形成纵向珠,或者可以如上沿着集成管道的外表面形成微腔。因此,实施例的范围由所附权利要求而不是由前面的描述来指示。在权利要求书的等同物的含义和范围内的所有改变都包含在其范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1