一种自动采血装置的制作方法
1.本实用新型涉及采血设备技术领域,具体涉及一种自动采血装置。
背景技术:
2.随着自动化技术的发展,抽血机械人已经成为了是现实,现有的抽血机械人,通常利用红外线来扫描待采血部位,以便寻找静脉,并通过超声波成像技术来确认针尖将戳进血管以及控制进针深度,达到精确定位、抽血的目的,例如,美国初创公司vasculogic研制的,名为veebot的原型医疗机器人,可以替代护士抽血,在临床试验中的成功率已经高于90%,已经高于了人工抽血的成功率。
3.现有的专利中也公开了一些用于自动抽血(采血)的装置或系统,通常都配套有一套具有多自由度的机械手,以便利用机械手将采血针定位到所需的位置处,虽然可以用于代替医护人员进行采血,以避免医护人员经验不足而导致采血时间长、采血失败等问题,但这些装置或系统通常还存在结构复杂、成本高的问题,尤其是当其中的机械手采用悬挂安装时,存在装配不便的问题,不便于后期拆卸和更换,亟待解决。
技术实现要素:
4.本实用新型为解决现有采血装置或采血系统结构复杂,不便于悬挂安装机械手,且不便于后期拆卸和更换的问题,提供了一种结构简单紧凑的自动采血装置,机械手采用悬挂的方式进行安装,不仅有利于简化整个采血装置的结构,而且便于机械手的装配、便于后期拆卸和更换,主要构思为:
5.一种自动采血装置,包括基座、控制器、血管成像定位模块、电机、用于安装采血针的机械手以及安装结构,其中,
6.所述安装结构包括旋转架和支架,所述旋转架可拆卸的悬挂安装于基座,并在旋转架与基座之间围成第一安装空间,所述支架可拆卸的安装于所述旋转架,且支架位于所述第一安装空间内,所述支架与旋转架围成第二安装空间,所述电机固定于所述支架;
7.所述旋转架和支架分别构造有安装孔,所述机械手的上端构造有传动轴,所述传动轴和电机的输出轴分别通过对应的安装孔延伸进所述第二安装空间,且传动轴通过联轴器与电机的输出轴相连,机械手的下端构造有用于可拆卸安装采血针的夹持部,所述电机与控制器相连,用于在控制器的控制下驱动机械手围绕竖直方向回转所设定的角度;
8.所述机械手和血管成像定位模块分别与所述控制器相连,血管成像定位模块用于对血管成像并定位穿刺点,所述机械手用于在控制器的控制下动作,以使安装于机械手的采血针移动到所定位的穿刺点处。在本方案中,通过设置血管成像定位模块,可以方便的对患者皮肤下的血管成像,并可以在血管上确定一个点作为穿刺点;而通过设置机械手,使得采血针可以动作到所定位的穿刺点处,并可以通过机械手实现自动穿刺和自动退针功能,从而可以实现自动采血功能,非常的方便;而通过设置安装结构,既可以稳定、牢靠的实现对机械手的悬挂安装,又可以利用电机精确、方便的控制机械手围绕竖直方向回转所设定
的角度,以便更高效、快捷的使采血针运动到所定位的穿刺点处;此外,采用本方案提供的安装结构实现机械手的悬挂安装,不仅有利于简化整个自动采血装置的结构、降低成本,而且非常不便于后期拆卸和更换,从而可以有效解决现有技术存在的问题。
9.为便于传动轴的安装,进一步的,所述安装孔内还安装有轴承,所述轴承为回转支撑轴承。通过设置回转支撑轴承,不仅使得传动轴的安装更加方便,而且有利于对传动轴的约束和固定,防止传动轴摆动或晃动。
10.为解决可拆卸安装的问题,进一步的,所述旋转架通过螺栓安装于所述基座,所述支架通过螺栓安装于所述旋转架。
11.优选的,所述旋转架和/或所述支架为几字型结构。
12.为解决可拆卸夹持采血针的问题,优选的,所述采血针包括针杆和对称设置于针杆两侧的翼部,针杆的一端构造有针尖,用于穿刺;
13.所述夹持部包括固定于所述机械手的支撑体及构造于支撑体下方的至少两个卡扣,所述卡扣用于夹持所述针杆。以便实现对穿刺针的可拆卸夹持和固定。
14.优选的,所述卡扣为侧面构造有开口的圆筒结构,且所述开口的宽度小于针杆的外径,圆筒结构的内径大于或等于针杆的外径。通过构造开口,使得卡扣具有一定的弹性,不仅使得针杆可以通过该开口顺利的卡入卡扣内,而且在外力的作用下,针杆可以顺利的脱离卡扣,便于退针、换针。
15.为简化机械手的结构,降低成本,优选的,所述机械手包括一级机架、动力臂、二级机架、角度调节部以及伸缩器,其中,所述传动轴构造于所述一级机架,所述动力臂的两端分别可转动的连接于一级机架和二级机架,所述伸缩器固定于所述二级机架,且所述支撑体固定于所述伸缩器;
16.所述角度调节部的两端分别可转动的连接于所述一级机架和二级机架;所述角度调节部和伸缩器分别与所述控制器相连,角度调节部用于在控制器的控制下伸/缩,以调节夹持部的俯/仰角度;伸缩器用于在控制器的控制下伸/缩,以控制进针深度。
17.优选的,所述角度调节部为电推杆、气缸或液压缸;和/或,所述伸缩器为电推杆、气缸或液压缸。
18.优选的,所述基座为筒状结构。
19.为解决患者保持正确的采血姿势的问题,进一步的,所述基座内构造有用于支撑患者手臂的垫枕及用于患者握持的握持件,所述握持件设置于所述垫枕的一端,且所述握持件为u形或l形结构。通过构造垫枕,可以在采血时支撑患者的手臂,而通过构造握持件,使得患者可以握持住握持件,以便顺利完成采血。
20.进一步的,所述握持件套设有海绵套。更便于患者握持。
21.为解决采血时的压脉问题,进一步的,还包括压脉机构,所述压脉机构包括气缸和安装于气缸的压头,所述压头的下表面构造为弧形,用于接触患者的皮肤;所述气缸竖直安装于所述垫枕的上方,并与所述控制器相连,气缸用于在控制器的控制下驱动压头沿竖直方向移动。以便在采血时可以自动压紧放置于垫枕上的手臂,以便达到压紧静脉的目的。
22.进一步的,所述血管成像定位模块包括红外血管显像仪和机械视觉组件,所述红外血管显像仪和机械视觉组件分别与所述控制器相连,红外血管显像仪用于采集患者手臂处血管的影像并传输给控制器;所述机械视觉组件用于采集患者手臂的影像并传输给控制
器。控制器根据红外血管显像仪和机械视觉组件所传输的影像数据进行图像处理,以自动识别和定位所要采血的血管,从而可以控制机械手将采血针调节到所需的位置处,并自动穿刺所设定的深度,达到自动采血的目的。
23.与现有技术相比,使用本实用新型提供的一种自动采血装置,结构简单紧凑,设计合理,在临床中,可以实现自动采血功能,非常的方便;而通过设置安装结构,既可以稳定、牢靠的实现对机械手的悬挂安装,又有利于简化结构、降低成本,非常便于后期拆卸和更换,从而可以有效解决现有技术存在的问题。
附图说明
24.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
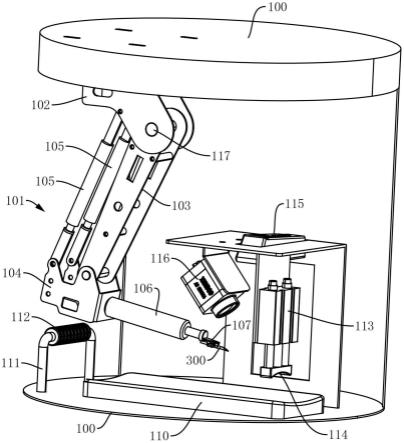
25.图1为本实用新型实施例中提供的一种自动采血装置的结构示意图之一。
26.图2为本实用新型实施例中提供的一种自动采血装置的结构示意图之二。
27.图3为本实用新型实施例中提供的一种自动采血装置中,安装结构的局部示意图。
28.图4为本实用新型实施例中提供的一种自动采血装置中,夹持部的局部结构示意图。
29.图5为本实用新型实施例中提供的一种自动采血装置中,夹持部夹持采血针后的局部示意图。
30.图中标记说明
31.基座100、机械手101、一级机架102、动力臂103、二级机架104、角度调节部105、伸缩器106、夹持部107、支撑体108、卡扣109、垫枕110、握持件111、海绵套112、压脉机构113、压头114、红外血管显像仪115、机械视觉组件116、销轴117、电机118、旋转架119、支架120、轴承121、传动轴122、联轴器123、第一安装空间124、第二安装空间125
32.采血针300、针杆301、翼部302。
具体实施方式
33.下面将结合本实用新型实施例中附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.实施例1
35.请参阅图1-图5,本实施例中提供了一种自动采血装置,包括基座100、控制器、血管成像定位模块、电机118、用于安装采血针300的机械手101以及安装结构,其中,
36.所述安装结构包括旋转架119和支架120,所述旋转架119可拆卸的悬挂安装于基
座100,并在旋转架119与基座100之间围成第一安装空间124,如图1-图5所示,所述支架120可拆卸的安装于所述旋转架119,且支架120位于所述第一安装空间124内,所述支架120与旋转架119围成第二安装空间125,如图3所示,所述电机118固定于所述支架120;
37.所述旋转架119和支架120分别构造有安装孔,如图3所示,作为举例,在本实施例中,所述机械手101可以采用现有技术中具有四自由度的机械手101;所述机械手101的上端构造有传动轴122,所述传动轴122和电机118的输出轴分别通过对应的安装孔延伸进所述第二安装空间125,且传动轴122通过联轴器123与电机118的输出轴相连,机械手101的下端构造有用于可拆卸安装采血针300的夹持部107,以便约束和固定采血针300;
38.所述电机118可以优先采用步进电机118或伺服电机118,所述电机118与控制器相连,用于在控制器的控制下驱动机械手101围绕竖直方向回转所设定的角度;既可以实现精确的回转动作,以调节机械手101的方位,又便于与其它机构,如退针机构等相互配合使用。
39.所述机械手101和血管成像定位模块分别与所述控制器相连,血管成像定位模块用于对血管成像并定位穿刺点,所述机械手101用于在控制器的控制下动作,控制器用于控制机械手101按规划的路径动作,以使安装于机械手101的采血针300移动到所定位的穿刺点处。
40.具体而言,在本实施例中,通过设置血管成像定位模块,可以方便的对患者皮肤下的血管成像,并可以定位血管的位置,从而可以定位所要采血的位置,作为举例,在本实施例中,所述血管成像定位模块可以采用现有技术中常用的血管成像定位模块;在本实施例中,通过设置机械手101,使得采血针300可以动作到所定位的穿刺点处,并可以通过机械手101实现自动穿刺和自动退针功能,从而可以实现自动采血功能,非常的方便;而通过设置安装结构,既可以稳定、牢靠的实现对机械手101的悬挂安装,又可以利用电机118精确、方便的控制机械手101围绕竖直方向回转所设定的角度,以便更高效、快捷的使采血针300运动到所定位的穿刺点处;此外,采用本方案提供的安装结构实现机械手101的悬挂安装,不仅有利于简化整个自动采血装置的结构、降低成本,而且非常不便于后期拆卸和更换,从而可以有效解决现有技术存在的问题。
41.为便于传动轴122的安装,如图3所示,在本实施例中,所述安装孔内还安装有轴承121,所述轴承121优先采用回转支撑轴承121;通过设置回转支撑轴承121,不仅使得传动轴122的安装更加方便,而且有利于对传动轴122的约束和固定,防止传动轴122摆动或晃动。
42.为实现可拆卸安装,在本实施例中,所述旋转架119通过螺栓安装于所述基座100,如图3所示,同时,所述支架120也可以通过螺栓安装于所述旋转架119。
43.旋转架119和支架120分别具有多种实施方式,作为举例,所述旋转架119可以优先采用几字型结构,如图3所示,旋转架119的两侧分别设置有若干用于通过螺栓的通孔;同时,所述支架120也可以采用几字型结构,且支架120的两侧分别设置有若干用于通过螺栓的通孔,通过旋转架119与支架120的配合,可以方便的形成所述第一安装空间124和第二安装空间125。
44.为便于退针,在本实施例中,所述采血针300包括针杆301和对称设置于针杆301两侧的翼部302,针杆301的一端构造有针尖,用于穿刺,如图5所示,另一端连接软管,以便引流和输送血液;而为可拆卸的夹持采血针300,在本实施例中,所述夹持部107包括固定于所述机械手101的支撑体108及构造于支撑体108下方的至少两个卡扣109,如图4及图5所示,
所述卡扣109用于夹持所述针杆301,以便实现对穿刺针的可拆卸夹持和固定。
45.可以理解,卡扣109的数目可以根据实际需求而定,作为举例,在本实施例中,翼部302两侧的针杆301分别设置有一个卡扣109,通过设置两个卡扣109,可以更稳定的约束采血针300,有利于提高穿刺精度。
46.由于针杆301为圆杆,为实现对针杆301的可拆卸约束,卡扣109具有多种实施方式,例如,卡扣109可以采用现有技术中常用的弹性夹子,如弹簧夹等,而在本实施例中,如图4及图5所示,所述卡扣109为侧面构造有开口的圆筒结构,使得卡扣109的横截面为c形结构,在本实施例中,所述开口的宽度应该小于针杆301的外径,而圆筒结构的内径应该大于或等于针杆301的外径,从而使得卡扣109具有一定的弹性,不仅使得针杆301可以通过该开口顺利的卡入卡扣109内,如图5所示,而且在外力的作用下,针杆301可以顺利的脱离卡扣109,便于退针、换针。
47.可以理解,在本实施例中,采血针300可以手动安装于所述夹持部107,也可以通过现有的自动换针机构实现自动换针,这里不再一一举例说明。
48.在本实施例中,基座100主要起到承力作用,其形状、构造可以根据实际需求而定,作为优选,所述基座100可以优先采用筒状结构,如图1及图2所示,基座100的一侧构造有安装空腔,安装结构中的旋转架119安装于安装空腔的顶部,所述机械手101和血管成像定位模块分别安装于所述安装空腔内,如图1及图2所示;
49.在本实施例中,所述血管成像定位模块用于对血管进行成像、精确识别、准确定位,血管成像定位模块可以采用现有的技术实现,而作为另一种实施方式,在本实施例中,所述血管成像定位模块还包括红外血管显像仪115和机械视觉组件116等,如图1及图2所示,所述红外血管显像仪115和机械视觉组件116分别与所述控制器相连,红外血管显像仪115可以采用现有的红外血管显像仪115,既能实现血管成像,又能实现投影,所述红外血管显像仪115用于采集患者手臂处血管的影像并传输给控制器,控制器根据红外血管显像仪115所传输的影像数据进行图像处理,以便识别出血管分布轮廓图(红外血管显像仪115的技术原理是:利用血液里的血红蛋白对红外光的吸收比其他组织强的原理,首先向皮肤表面投射特定波长的近红外光,由光敏元器件采集皮肤红外图像,并经过控制器处理成血管分布轮廓图),同时,红外血管显像仪115可以在控制器的控制下将所述血管分布轮廓图清晰地投影在皮肤表面,同时,控制器也可以通过图像处理自动确定一个穿刺点,且所确定的穿刺点可以连同血管分布轮廓图一起投影于皮肤表面,便于后续对穿刺点进行定位;在本实施例中,所述机械视觉组件116可以采集患者皮肤上所投影血管分布轮廓图的图像并传输给控制器,同样地,控制器可以根据机械视觉组件116所传输的图像进行图像识别和处理,以便实现对穿刺点的定位,使得控制器可以精确控制机械手101将采血针300调节到所确定的穿刺点处,并自动穿刺所设定的深度,达到自动采血的目的,非常的方便、高效、精确。
50.在本实施例中,控制器具有多种实施方式,作为举例,控制器可以为pc机、单片机、嵌入式芯片等;机械视觉组件可以包括摄像机或摄像头,以便采集影像数据。
51.为使得患者可以保持正确的采血姿势,在进一步的方案中,所述基座100构造有用于支撑患者手臂的垫枕110及用于患者握持的握持件111,所述握持件111套设有海绵套112,如图1及图2所示,所述握持件111设置于所述垫枕110的一端,且所述握持件111可以为
u形或l形结构。通过构造垫枕110,可以在采血时支撑患者的手臂,而通过构造握持件111,使得患者可以握持住握持件111,以便顺利完成采血。
52.在更完善的方案中,为在采血时实现自动压脉的功能,本自动采血装置还包括压脉机构113,压脉机构113具有多种实施方式,例如,可以现有的自动充气式压脉器实现,而在另一种实施方式中,所述压脉机构113包括气缸和安装于气缸的压头114,如图1及图2所示,所述压头114的下表面构造为弧形,用于接触患者的皮肤;所述气缸竖直安装于所述垫枕110的上方,并与所述控制器相连,气缸用于在控制器的控制下驱动压头114沿竖直方向移动。以便在采血时可以自动压紧(压紧力可以根据相关参数进行控制,这里不再赘述)放置于垫枕110上的手臂,以便达到压紧静脉的目的。
53.实施例2
54.为简化机械手101的结构,降低成本,本实施例2与上述实施例1的主要区别在于,本实施例所提供的自动采血装置中,所述机械手101包括一级机架102、动力臂103、二级机架104、角度调节部105以及伸缩器106,其中,所述传动轴122构造于所述一级机架102,所述动力臂103的两端分别可转动的连接于一级机架102和二级机架104,例如,所述动力臂103的两端分别通过销轴117铰接于一级机架102和二级机架104;如图1-图3所示,所述角度调节部105的两端分别可转动的连接于所述一级机架102和二级机架104,且所述角度调节部105可以优先采用电推杆、气缸或液压缸等,角度调节部105与控制器相连,用于在控制器的控制下伸/缩,以便有效调节夹持部107的俯/仰角度,以便对准所设定或所规划的穿刺点,以便倾斜插入皮肤。
55.如图1-图3所示,所述伸缩器106固定于所述二级机架104,且所述支撑体108固定于所述伸缩器106,伸缩器106也可以采用电推杆、气缸或液压缸等,伸缩器106与所述控制器相连,用于在控制器的控制下伸/缩,以控制进针深度。
56.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1