具有自动行走机器人底盘的立柱式UV-C紫外消毒系统的制作方法
具有自动行走机器人底盘的立柱式uv
‑
c紫外消毒系统
技术领域
1.本实用新型属于消毒器械领域,具体涉及一种具有自动行走机器人底盘的立柱式uv
‑
c紫外消毒系统。
背景技术:
2.众所周知,随着公共场所的消毒需要(如:医院、学校、办公场所),采用uv
‑
c紫外进行杀菌消毒的较多,因为,uv
‑
c紫外线波长为100
‑
280纳米,其中波长为254纳米时,杀菌作用最强。
3.具体的,低压uv
‑
c紫外线灯的主发射波长为253.7纳米,此波长对dna的作用为峰值的85%。同时,uv
‑
c紫外线杀菌灯发出的253.7(254nm)nm光线,与微生物细胞中核酸的吸收光谱相吻合, 它接近于核酸(dna/rna)吸收的平均波长,从而破坏微生物机体细胞中的dna(脱氧核糖核酸)或rna(核糖核酸)的分子结构,造成生长性细胞死亡和(或)再生性细胞死亡,使微生物不能发挥细胞功能,从而杀死或灭活微生物。
4.uv
‑
c紫外消毒产品可常用于空气消毒(病毒、细菌或真菌可通过呼吸、说话、咳嗽、打喷嚏、扬尘或任何产生气溶胶固态或液态颗粒的活动在空气中传播。采暖、通风和空调系统将导致空气中的细菌进一步传播,是重点消毒区域)、物表消毒(人们咳嗽或呼气时会产生唾液流体和飞沫。这些流体和飞沫大多落在桌子或电话等附近表面和物体上。如果这些流体和飞沫携带有病毒,工作人员可能通过接触受污染的表面或物体后再接触眼耳口鼻而感染病毒)及物品消毒(病毒可以在物体表面存活长达5天,因此接触日常用品或共享设备感染病毒的风险更高。对日常反复使用的物品定期消毒,有助灭活物体表面的病毒和细菌)等。
5.例如:新冠病毒属于β属性的单股正链的rna病毒,直径60
‑
140nm。紫外线作用于核酸,改变蛋白质结构,使病毒灭活。同时,新型冠状肺炎病毒的生存能力强于一般病毒,但高温消毒和紫外线照射等方法,可以有效灭杀冠状病毒,研究人员使用辐射强度大于90μw/cm
²
的紫外线照射冠状病毒,30min即可灭杀。
6.而常规的uv
‑
c紫外消毒装置,其包括uv
‑
c紫外灯、灯座、灯罩,一旦组装后,其存在以下缺陷:
7.1)、拆装不便;
8.2)、uv
‑
c紫外灯具若暴露于外,很容易损坏,不便于输送,同时正对应急情况,灯罩所形成保护区间非常小,而且灯罩无法进行应急遮挡,应变能力差;
9.3)、所采用的灯罩板很难实现紫外线的全面发射,致使uv
‑
c紫外灯具所形成杀菌区较小,进而影响消毒的效率和品质;
10.4)、所形成的杀菌和消毒的区域较小,尤其是在一定层高空间内,无法全面覆盖,同时,由于紫外光照强度低,通常消毒一个区域需要长达几小时的持续照射,这样一来,消毒消耗的时间长,即,杀菌效率低;
11.5)、自动行走机器人底盘对地面形成面积遮挡,因此,很容易造成地面杀菌消毒的
遗漏。
技术实现要素:
12.本实用新型所要解决的技术问题是克服现有技术的不足,提供一种改进的具有自动行走机器人底盘的立柱式uv
‑
c紫外消毒系统。
13.为解决以上技术问题,本实用新型采取如下技术方案:
14.一种具有自动行走机器人底盘的立柱式uv
‑
c紫外消毒系统,其包括:
15.机器人底盘,其能够自动行走且智能避让障碍物;
16.消毒装置,其设置在所述机器人底盘上,且包括由uv
‑
c紫外灯具、灯座、及灯罩板构成消毒单元,
17.消毒单元有多个,其中灯座包括位于灯罩板两端部的第一灯头模块和第二灯头模块,uv
‑
c紫外灯具自两端部快拆式连接在第一灯头模块和第二灯头模块之间,灯罩板的内壁面为全反射uv
‑
c紫外光的反射面,灯罩板的外壁面为遮蔽面;
18.消毒装置还包括矗立在机器人底盘上且自自身侧面向内凹陷形成多个消毒安装仓的定位立柱、用于将每个消毒单元自灯座的一端部自由转动设置在消毒安装仓中的定位架盘、用于将多个消毒单元自灯座的另一端部相同步连接的传动件、带动传动件同步且同向转动的动力件、设置在定位立柱内部的塔式镇流器、以及设置在机器人底盘底面的光线杀毒器,其中每个uv
‑
c紫外灯具在定位立柱长度方向所形成消毒区能够覆盖待消毒区的高度,多个uv
‑
c紫外灯具形成360
°
环形杀菌消毒区,光线杀毒器形成地面杀菌消毒区,地面杀菌消毒区和360
°
环形杀菌消毒区将待消毒区全面覆盖。
19.优选地,消毒安装仓沿着所述定位立柱的长度方向延伸,且多个消毒安装仓绕着所述定位立柱的周向呈阵列式分布,多个消毒单元一一对应设置在消毒安装仓中,且每相邻两个uv
‑
c紫外灯具在形成的360
°
环形杀菌消毒区中光束部分重叠。在此,通过均匀分布的消毒单元形成360
°
环形杀毒区,同时每相邻两组消毒单元之间的光线之间相对交叉互补,增强光照强度,提升消毒杀菌效率和效果,同时,配合自动行走底盘,能够自动且快速实现空间内高效的杀菌消毒。
20.根据本实用新型的一个具体实施和优选方面,定位架盘位于顶部,传动件位于定位立柱的底部,动力件位于定位立柱内且处于塔式镇流器的下方。因此,结构紧凑,占用空间小,而且重心下移,移动平稳。
21.优选地,传动件包括一一对应设置在每个消毒单元的所述灯座底部的传动轮,动力件包括动力马达和动力轮,其中动力轮与多个传动轮传动连接,且在动力轮的转动下,多个传动轮同步且同向转动。这样一来,可实现多个消毒单元的同步运动。
22.本例中,动力轮位于多个传动轮中间,且动力轮和传动轮之间为相啮合的齿轮传动。不仅结构简单,而且非常合理的布局空间,有利于产品小型化。
23.进一步的,在机器人底盘上设有感应开关,动力轮上对应设有位于感应开关相对两侧的第一感应模块和第二感应模块,其中第一感应模块和第二感应模块中任一个触发所述的感应开关后,动力轮停止转动,并正反向之间切换所述动力轮转动方向。在此,通过感应开关和感应模块的配合,进而准确的完成消毒单元的状态转换,而且运动至极限位置后,可以触发动力轮换向,进一步方便状态转换的实施。
24.根据本实用新型的又一个具体实施和优选方面,光线杀毒器为uv
‑
c灯具,且所形成杀毒区域至少将机器人底盘全面覆盖。在此,通过uv
‑
c紫外灯具的设置,能够随着自动行走机器人的移动,确保无遗漏的完成杀毒区域的全面杀毒。
25.本例中,光线杀毒器所形成的杀毒区域以机器人底盘d为中心,且5米半径范围内所有区域。
26.优选地,灯座包括位于灯罩板两端部的第一灯头模块和第二灯头模块,uv
‑
c紫外灯具自两端部快拆式连接在第一灯头模块和所述第二灯头模块之间。简化结构,便于拆装。
27.优选地,灯罩板包括壳板、形成在壳板内的uv
‑
c紫外光全反射面板,其中uv
‑
c紫外光全反射面板与uv
‑
c紫外灯具平行且隔开设置。实现uv
‑
c紫外光线的全面和最大化利用,同时,本例中形成圆周形阵列,使得机器周围一圈的紫外光强均处于较大值,从而实现更高效的消毒。
28.根据本实用新型的一个具体实施和优选方面,壳板包括沿着uv
‑
c紫外灯具长度方向延伸的第一面板、分别自第一面板的两侧向内弯折的第二面板和第三面板,uv
‑
c紫外光全反射面板位于第一面板、第二面板和第三面板的内壁面,且一体成型构成同波段反光板的反射曲面。在此通过改变造型的壳板,使得uv
‑
c紫外光全反射面板对应改变,因此,实现反射曲面的同波段反光,这样才能实现最佳角度的反射,同时在未使用时,能够形成最佳角度的保护,这样一来,运输或移动都比较安全,uv
‑
c紫外灯具损坏率较低。
29.优选地,第一灯头模块和第二灯头模块分别通过螺栓件或螺钉贯穿第一面板和uv
‑
c紫外光全反射面板定位在灯罩板的内壁。这样组装方便。
30.进一步的,第一面板的宽度大于uv
‑
c紫外灯具的外径。能够全面且合理的将光线反射至杀菌区域。
31.优选地,第二面板和第三面板关于第一面板的中部对称设置。
32.根据本实用新型的又一个具体实施和优选方面,在第二面板和第三面板远离第一面板的侧边形成有向内延伸的凸边,两条凸边分别抵触在第一灯头模块和第二灯头模块相对两侧。在凸边的相对夹持和抵触下、并配合螺栓件,提高灯座和灯罩板连接的稳定性。
33.优选地,第一灯头模块和第二灯头模块上分别形成第一插装孔和第二插装孔,uv
‑
c紫外灯具自两端部插装在第一插装孔和第二插装孔之间。在插装孔的设置下,通过插接不仅能够实现拆装便捷,而且也具有较高的稳定性。
34.具体的,uv
‑
c紫外灯具具有正极端和负极端,其中正极端插入第一插装孔,负极端插入第二插装孔,uv
‑
c紫外消毒单元还包括设置在第二插装孔内的抵触弹簧。由第一插装孔和第二插装孔降低uv
‑
c紫外灯具意外掉落的可能性,同时在抵触弹簧的设置下,十分方便uv
‑
c紫外灯具的拆装,而且抵触后uv
‑
c紫外灯具的稳定性进一步提高。
35.由于以上技术方案的实施,本实用新型与现有技术相比具有如下优点:
36.本实用新型一方面由所形成的360
°
环形杀菌消毒区和地面杀菌消毒区将待消毒区全面覆盖,再结合反射面的同波段反射,增强紫外光照强度,提升消毒杀菌效率,同时灯具拆装也十分方便,而且结构布局合理,组装方便;另一方面通过多个消毒单元状态能够同步切换,便于运输,且应变能力强,同时在镇流器的内置下,不仅空间合理分布,而且也进一步提升uv
‑
c紫外光的杀菌消毒的能力。
附图说明
37.下面结合附图和具体的实施方式对本实用新型做进一步详细的说明。
38.图1为本实用新型消毒机器人的主视示意图;
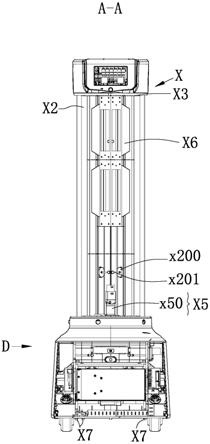
39.图2为图1中a
‑
a向剖示意图;
40.图3为图1中的消毒装置的结构示意图;
41.图4为图2的主视示意图;
42.图5为图4中b
‑
b处剖视示意图;
43.图6为图4的仰视示意图;
44.图7为图1中的uv
‑
c紫外消毒单元的结构示意图;
45.图8为图7的主视示意图;
46.图9为图8中c
‑
c向剖视示意图;
47.图10为图8的右视示意图;
48.图11为图10中d
‑
d向剖视示意图;
49.d、机器人底盘;
50.x、uv
‑
c紫外消毒装置;x1、消毒单元;1、uv
‑
c紫外灯具;2、灯座;21、第一灯头模块;210、第一插装孔;22、第二灯头模块;220、第二插装孔;s1、第一连接轴;s2、第二连接轴;3、灯罩板;30、壳板;301、第一面板;302、第二面板;303、第三面板;304、凸边;31、uv
‑
c紫外光全反射面板;z、遮蔽面;s、反射面;4、抵触弹簧;5、螺栓件(螺钉);x2、定位立柱;x20、定型支撑架;x200、定位模块;x201、撑杆;g、消毒安装仓;g1、仓壁面;x3、定位架盘;x4、传动件;x40、传动轮;x5、动力件;x50、动力马达;x51、动力轮;x6、塔式镇流器;x7、光线杀毒器;
51.k、感应开关;c1、第一感应模块;c2、第二感应模块。
具体实施方式
52.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似改进,因此本技术不受下面公开的具体实施例的限制。
53.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
54.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
55.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内
部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
56.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
57.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
58.如图1所示,立柱式uv
‑
c紫外消毒系统,其包括机器人底盘d和设置在机器人底盘d上的消毒装置x。
59.机器人底盘d,能够自动避让障碍物,结构可以参考市场常用的扫地机。
60.结合图2和图3所示,立柱式uv
‑
c紫外消毒装置x包括由uv
‑
c紫外灯具1、灯座2、及灯罩板3构成一个消毒单元x1;矗立在机器人底盘d上且自自身侧面向内凹陷形成多个消毒安装仓g的定位立柱x2、用于将每个消毒单元x1自灯座2的一端部自由转动设置在消毒安装仓g中的定位架盘x3、用于将多个消毒单元x1自灯座2的另一端部相同步连接的传动件x4、带动传动件x4同步且同向转动的动力件x5、设置在定位立柱x2内部的塔式镇流器x6、以及设置在机器人底盘d底面的光线杀毒器x7。
61.具体的,在定位立柱x2内形成定型支撑架x20,其中每个定型支撑架x20报固定在定位立柱x2内壁的定位模块x200;一端部设置在定位模块x200上、另一端部向定位立柱x2中心延伸的撑杆x201,其中多根撑杆x201自定位立柱x2中心相抵触设置。增强定位立柱x2的刚性,避免变形。
62.结合图4和图5所示,消毒安装仓g沿着定位立柱x2的长度方向延伸,且多个消毒安装仓g绕着定位立柱x2的周向呈阵列式分布,多个消毒单元x1一一对应设置在消毒安装仓g中。
63.在此,通过均匀分布的多个uv
‑
c紫外灯具形成360
°
环形杀菌消毒区,同时每相邻两个uv
‑
c紫外灯具的光线之间相对交叉互补,增强光照强度,提升消毒杀菌效率和效果。
64.本例中,消毒安装仓g有10个,因此,消毒单元x1对应有10个。
65.定位架盘x3位于顶部,传动件x4位于定位立柱x2的底部,动力件x5位于定位立柱x2内且处于塔式镇流器x6的下方。因此,结构紧凑,占用空间小
66.传动件x4包括一一对应设置在每个消毒单元x1的灯座2底部的传动轮x40。
67.动力件x5包括动力马达x50和动力轮x51,其中动力轮x51与多个传动轮x40传动连接,且在动力轮x51的转动下,多个传动轮x40同步且同向转动。这样一来,可实现多个消毒单元的同步运动,也确保多个消毒单元处于相同状态。
68.结合图6所示,动力轮x51位于多个传动轮x40中间,且动力轮x51和传动轮x40之间为相啮合的齿轮传动。不仅结构简单,而且非常合理的布局空间,有利于产品小型化。
69.在机器人底盘d上设有感应开关k,动力轮x51上对应设有位于感应开关k相对两侧的第一感应模块c1和第二感应模块c2,其中第一感应模块c1和第二感应模块c2中任一个触发感应开关k后,动力轮c51停止转动,并正反向之间切换动力轮x51转动方向。在此,通过感应开关和感应模块的配合,进而准确的完成消毒单元的状态转换,而且运动至极限位置后,可以触发动力轮换向,进一步方便状态转换的实施。
70.光线杀毒器x7为uv
‑
c紫外灯具,且所形成杀毒区域至少将机器人底盘d全面覆盖。在此,通过uv
‑
c紫外灯具的设置,能够随着自动行走机器人的移动,确保无遗漏的完成杀毒区域的全面杀毒。
71.因此,本例中,在360
°
环形杀菌消毒区和光线杀毒器形成地面杀菌消毒区的组合下,能够将待消毒区全面覆盖,这样一来,在底盘的行走过程中,能够自动且快速实现空间内高效的杀菌消毒。
72.本例中,光线杀毒器所形成的杀毒区域以机器人底盘d为中心,且5米半径范围内所有区域。
73.结合图7所示,灯座2包括第一灯头模块21和第二灯头模块22,uv
‑
c紫外灯具1的两端部安装在第一灯头模块21和第二灯头模块22之间。
74.第一灯头模块21和第二灯头模块22上分别形成第一插装孔210和第二插装孔220,uv
‑
c紫外灯具1自两端部插装在第一插装孔210和第二插装孔220之间。在插装孔的设置下,通过插接不仅能够实现拆装便捷,而且也具有较高的稳定性。
75.具体的,uv
‑
c紫外灯具1具有正极端和负极端,其中正极端插入第一插装孔210,负极端插入第二插装孔220,uv
‑
c紫外消毒单元还包括设置在第二插装孔220内的抵触弹簧4。由第一插装孔和第二插装孔降低uv
‑
c紫外灯具意外掉落的可能性,同时在抵触弹簧的设置下,十分方便uv
‑
c紫外灯具的拆装,而且抵触后uv
‑
c紫外灯具的稳定性进一步提高。
76.结合图8和图9所示,灯座2自两端部绕着uv
‑
c紫外灯具长度方向转动设置在消毒安装仓g中,灯罩板3的内壁面为全反射uv
‑
c紫外光的反射面s,灯罩板3的外壁面为遮蔽面z,使用时,反射面s遮挡消毒安装仓g的仓壁面g1;未使用时,遮蔽面z将uv
‑
c紫外灯具1暗藏保护在灯罩板3和消毒安装仓g仓壁所形成的安全区内。
77.结合图10和图11所示,灯罩板3包括壳板30、形成在壳板30内的uv
‑
c紫外光全反射面板31,其中uv
‑
c紫外光全反射面板31与uv
‑
c紫外灯具1平行且隔开设置。实现uv
‑
c紫外光线的全面和最大化利用,避免光线之间的干扰影响杀菌区域的最佳形成。
78.壳板30包括沿着uv
‑
c紫外灯具1长度方向延伸的第一面板301、分别自第一面板301的两侧向内弯折的第二面板302和第三面板303,uv
‑
c紫外光全反射面板31位于第一面板301、第二面板302和第三面板303的内壁面。在此通过改变造型的壳板,使得uv
‑
c紫外光全反射面板对应改变,以实现最佳角度的反射,同时在未使用时,能够形成最佳角度的保护,这样一来,运输或移动都比较安全,uv
‑
c紫外灯具损坏率较低。
79.具体的,uv
‑
c紫外光全反射面板31一体成型设置,且构成同波段反光板的反射曲面,这样一来,实现反射曲面的同波段反光,增加光照强度。
80.第一灯头模块21和第二灯头模块22分别通过螺栓件5贯穿第一面板301和uv
‑
c紫外光全反射面板31定位在灯罩板3的内壁。这样组装方便。
81.第一面板301的宽度大于uv
‑
c紫外灯具1的外径。能够全面且合理的将光线反射至
杀菌区域。
82.第二面板302和第三面板303关于第一面板301的中部对称设置。
83.本例中,在第二面板302和第三面板303远离第一面板301的侧边形成有向内延伸的凸边304,两条凸边304分别抵触在第一灯头模块21和第二灯头模块22相对两侧。在凸边304的相对夹持和抵触下、并配合螺栓件,提高灯座和灯罩板连接的稳定性。
84.此外,第一灯头模块21和第二灯头模块22分别自外端部形成有第一连接轴s1和第二连接轴s2,第一连接轴s1和第二连接轴s2中的一个为动力轴、另一个为自由转动端。这样设置,便于灯具在使用状态和非使用状态的切换。
85.具体的,第一连接轴s1连接在定位架盘x3,传动轮x40设置在第二连接轴s2上。
86.综上,本实施例具有以下优势:
87.1、多个消毒单元的圆周形阵列分布,能够形成360
°
环形杀毒区,并结合底部光线杀毒器所形成的以机器人底盘为中心,且5米半径范围内所有区域为杀菌消毒区,从而全面实现待消毒区域内的快速杀菌消毒,避免出现杀菌消毒的遗漏;
88.2、每相邻两组消毒单元之间所发出的光线能够交叉互补,再结合反射面的同波段反射,使得周围一圈的紫外光强均处于较大值,且光照强度更强、更均匀,同时,机器周围的光照强度是普通紫外消毒器的20倍左右,这样一来,能够大幅度缩短消毒杀菌时间,以提升本消毒机的消毒杀菌效率和效果;
89.3、由灯具的快拆,进而改善灯具拆装的便捷性,同时插接并组合抵触弹簧的模式,十分方便uv
‑
c紫外灯具的拆装,而且抵触后uv
‑
c紫外灯具的稳定性进一步提高;
90.4、通过消毒单元的同步且同向的转动,能够实现uv
‑
c紫外光线的全面射入杀菌区域或者能够实现uv
‑
c紫外光线的遮蔽或者将灯具暗藏保护在安全区,因此,便于运输保护灯具,且应变能力强;
91.5、结构分布紧凑,组装后体积小,并且通过灯具的长度以及机器人底盘所形成支撑高度,能够使得所形成的杀菌消毒区能够覆盖所对应的区域层高,进而加速杀菌消毒效率;
92.6、在镇流器的内置下,不仅空间合理分布,而且也进一步提升uv
‑
c紫外光的杀菌消毒的能力。
93.以上对本实用新型做了详尽的描述,但本实用新型不限于上述的实施例。凡根据本实用新型的精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1