导向器及导向组件的制作方法
1.本技术涉及医疗设备领域,具体涉及一种导向器及导向组件。
背景技术:
2.骨科手术过程中,套筒穿入导向器的导向筒中,以对其他的器械进行导向。套筒的外壁和导向筒的内壁均为圆柱形,套筒和导向筒的接触面积较大,手术中经常有血液溅到套筒和导向筒之间,血液很快就会凝固,导致套筒和导向筒粘连在一起,很难分开,甚至使得手术中断,造成很严重的后果。
技术实现要素:
3.基于上述问题,本技术提供了一种导向器及导向组件,减少套筒和导向器的接触面积,避免手术器械的粘连。
4.本技术的一个实施例提供一种导向器,包括:支撑杆;导向筒,设置于所述支撑杆的一端;限位结构,设置于所述导向筒的内壁,所述限位结构的数量为多个,多个所述限位结构沿所述导向筒的轴线依次设置,所述限位结构用于对套筒沿所述导向筒的轴线移动进行导向。
5.根据本技术的一些实施例,所述限位结构包括多个凸起,多个所述凸起分别设置于所述导向筒的内壁,多个所述凸起绕所述导向筒的轴线圆周均布,多个所述凸起用于与套筒的外壁接触。
6.根据本技术的一些实施例,所述凸起与所述套筒的外壁为面接触。
7.根据本技术的一些实施例,所述凸起与所述套筒的外壁为点接触。
8.根据本技术的一些实施例,所述凸起与所述套筒的外壁为线接触。
9.根据本技术的一些实施例,所述限位结构包括圆环部,所述圆环部设置于所述导向筒的内壁。
10.根据本技术的一些实施例,所述导向筒上设有豁口,所述豁口平行于所述导向筒的轴线延伸。
11.本技术的一个实施例提供一种导向组件,包括:如上所述的导向器;套筒,所述套筒穿入所述导向筒,所述限位结构对所述套筒沿所述导向筒的轴线移动进行导向。
12.根据本技术的一些实施例,所述限位结构包括多个凸起的情况下,所述套筒的外壁横截面为圆形。
13.根据本技术的一些实施例,所述限位结构包括圆环部的情况下,所述套筒的外壁横截面为多边形。
14.本技术的导向器及导向组件,减少了套筒与导向器的接触面积,手术中即使有血液溅到套筒与导向筒之间,血液的凝固通常不足以造成套筒与导向筒的粘连;即便套筒与导向筒有少量的粘连,医生稍加用力可将二者分离,保证手术的顺利进行;导向组件结构简单,使用方便快捷。
附图说明
15.为了更清楚地说明本技术的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本技术要求保护的范围。
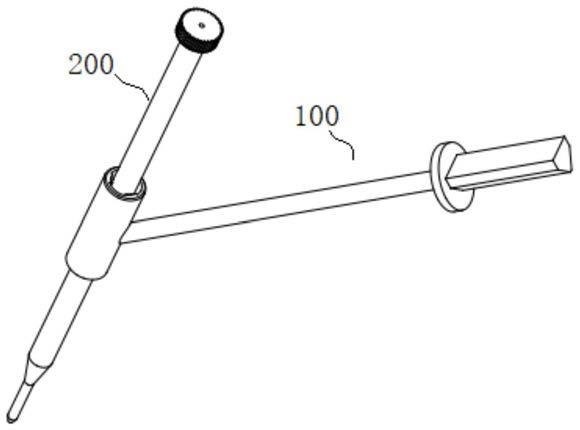
16.图1是本技术导向器与套筒的示意图;
17.图2是本技术导向器的示意图;
18.图3是本技术限位结构的示意图;
19.图4是本技术锥台凸起的示意图;
20.图5是本技术球形凸起的示意图;
21.图6是本技术球形凸起与套筒配合的示意图;
22.图7是本技术圆柱凸起的示意图;
23.图8是本技术圆柱凸起与套筒配合的示意图;
24.图9是本技术圆环部的示意图;
25.图10是本技术套筒一种实施方式的示意图;
26.图11是本技术圆环部与套筒配合的示意图;
27.图12是本技术导向筒的豁口的示意图。
具体实施方式
28.下面结合本技术实施例中的附图,对本技术的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
29.实施例1
30.如图1和图2所示,本实施例提供一种导向器100。导向器100包括支撑杆1、导向筒2和限位结构3。导向器100可用于对套筒200进行导向。
31.支撑杆1用于连接手术机器人的机械臂,机械臂根据控制信息带动导向器100移动到预设位置。
32.导向筒2设置于支撑杆1的一端。导向筒2的内部为沿导向筒2的轴线延伸的通孔,使用时,套筒200穿入导向筒2中,套筒200可沿导向筒2的轴线移动,用于对其他手术器械的导向,如对导针的置入进行导向。
33.如图3所示,限位结构3设置于导向筒2的通孔内壁上。限位结构3的数量为多个,多个限位结构3沿导向筒2的轴线依次设置,多个限位结构3配合形成导向通道。多个限位结构3分别与套筒200的外壁接触,以对套筒200沿导向筒2的轴线移动进行导向。可选地,本实施例中,限位结构3的数量为两个,两个限位结构3分别靠近导向筒2两端的开口以提高限位结构3对套筒200的导向效果。
34.导向器100通过限位结构3与套筒200接触,实现对套筒200的导向,减少了套筒200与导向器100的接触面积,手术中即使有血液溅到套筒与导向筒之间,血液的凝固基本不会造成套筒200与限位结构3的粘连,保证手术的顺利进行。
35.可选地,本技术的一个实施例中,限位结构3包括多个凸起,多个凸起分别设置于导向筒2的内壁上。同一限位结构3的多个凸起绕导向筒2的轴线圆周均布。套筒200穿入导向筒2时,多个凸起分别与套筒200的外壁接触,实现对套筒200沿导向筒2的轴线移动的精准导向。
36.如图4所示,凸起一种可选的实施方式中,凸起为锥台凸起31。一限位结构3包括的锥台凸起31数量可根据需求设置,本实施例中一限位结构3包括的锥台凸起31数量为三个。在导向筒2顶端开口附近设置三个绕导向筒2的轴线圆周均布的锥台凸起31,在导向筒2底端开口附近设置另外三个绕导向筒2的轴线圆周均布的锥台凸起31。锥台凸起31与套筒200接触的面为弧面,实现锥台凸起31与套筒200外壁的面接触。同一限位结构3的三个锥台凸起31的弧面与套筒200的外壁配合,保证对套筒200沿导向筒2轴线的移动进行精准的导向。
37.如图5和图6所示,凸起另一种可选的实施方式中,凸起为球形凸起32。球形凸起32为半球状。本实施例中,一限位结构3包括的球形凸起32的数量为三个,但不以此为限。在导向筒2顶端开口附近设置三个绕导向筒2的轴线圆周均布的球形凸起32,在导向筒2底端开口附近设置另外三个绕导向筒2的轴线圆周均布的球形凸起32。一限位结构3的三个球形凸起32的顶点所在圆的直径与套筒200的外壁直径基本相等,实现球形凸起32与套筒200的外壁的点接触,保证对套筒200进行精准的导向。
38.如图7和图8所示,凸起再一种可选的实施方式中,凸起为圆柱凸起33。本实施例中,一限位结构3包括的圆柱凸起33的数量为四个,但不以此为限。在导向筒2顶端开口附近设置四个绕导向筒2的轴线圆周均布的圆柱凸起33,在导向筒2底端开口附近设置另外四个绕导向筒2的轴线圆周均布的圆柱凸起33。四个圆柱凸起33的顶面的内切圆的直径与套筒200的外壁直径基本相等,实现圆柱凸起33与套筒200的外壁的线接触,保证对套筒200进行精准的导向。
39.如图9、图10和图11所示,可选地,本技术的一个实施例中,限位结构3包括圆环部34。本实施例中,两个圆环部34分别设置于导向筒2的两端的内壁上。与圆环部34配合的套筒200的外壁横截面为多边形,例如为方形。套筒200的棱边210与圆环部34接触,以减小圆环部34与套筒200外壁的接触面积,实现圆环部34对套筒200的精准导向。
40.如图12所示,可选地,本技术的一个实施例中,导向筒2上设有豁口21,豁口21平行于导向筒2的轴线延伸。手术过程中,置入导针后,导针可通过豁口21与导向筒2分离,便于手术的进行。
41.实施例2
42.本实施例提供一种导向组件,包括如上所述的导向器100和套筒200。套筒200穿入导向筒2,限位结构3对套筒200沿导向筒2的轴线移动进行导向。
43.手术时,将导向器100的支撑杆1连接手术机器人的机械臂,通过机械臂带动导向器100移动至预设位置。将套筒200穿入导向筒2,限位结构3对套筒200进行导向。由于限位结构3与套筒200的接触面积很小,避免了血液凝固造成的套筒200和导向筒2的粘连。
44.可选地,本技术的一个实施例中,限位结构3包括多个凸起的情况下,套筒200的外壁横截面为圆形,便于套筒200与多个凸起的配合。
45.可选地,本技术的一个实施例中,限位结构3包括圆环部34的情况下,套筒200的外壁横截面为多边形。可选地,套筒200的外壁横截面为方形。圆环部34的内径与套筒200的外
壁的外接圆的直径基本相等,保证对套筒200进行精准的导向。
46.本技术的导向器及导向组件,结构简单,使用方便快捷,减少了套筒与导向器的接触面积,手术中即使有血液溅到套筒与导向筒之间,血液的凝固通常不足以造成套筒与导向筒的粘连;即便套筒与导向筒有少量的粘连,医生稍加用力可将二者分离,保证手术的顺利进行。
47.以上对本技术实施例进行了详细介绍。本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本技术的技术方案及其核心思想。因此,本领域技术人员依据本技术的思想,基于本技术的具体实施方式及应用范围上做出的改变或变形之处,都属于本技术保护的范围。综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1