一种远程手术显微镜设备的制作方法
1.本实用新型属于医疗器械领域,涉及一种远程手术显微镜设备,特别是一种远程眼科手术显微镜设备。
背景技术:
2.手术显微镜是用于提供放大器、照明系统和支撑系统来增强视觉效果,便于医生观察和记录人体的治疗过程的体视显微镜,手术显微镜的产生可以使医生观察到很多靠肉眼观察不到的部分,极大的提高了手术的成功率。目前手术显微镜已广泛应用于眼科、神经外科、耳鼻喉科、口腔科等科室的手术。
3.现有技术中的眼科手术显微镜,医护人员在手术端进行现场操作,在专家会诊或是教学的情形下,远程端只能通过语音或视频对手术端的手术步骤进行远程指导或是通过语言沟通指挥手术端的医护人员对仪器的高度、角度等参数进行调节,这样的互动存在着不够精确、实时反馈慢、延迟较大等缺陷,在实际应用中具有较大的局限性。
技术实现要素:
4.针对上述问题,本实用新型的目的是提供一种远程手术显微镜设备,远程端能够对显微镜的移动和/或变倍进行控制,使远程端与手术端的沟通与互动较为准确快速。
5.为解决上述技术问题,本实用新型采用的技术方案为:
6.一种远程手术显微镜设备,包括:
7.支架;
8.显微镜,其能够沿x、y或z轴移动地设置于所述支架上;
9.第一驱动机构,其用于驱动所述显微镜沿x、y或z轴移动;
10.第二驱动机构,其用于驱动所述显微镜进行变倍;
11.第一图像采集装置,其用于采集所述显微镜视野内的图像;
12.显示屏,其设置于所述支架上;
13.所述远程手术显微镜设备还包括:
14.通信设备,其用于和远程端交互;及
15.控制器,其和所述通信设备电性连接;
16.所述控制器还和所述第一驱动机构和/或所述第二驱动机构电性连接;
17.所述控制器还和所述第一图像采集装置及所述显示屏电性连接。
18.优选地,所述第一驱动机构能够用于驱动所述显微镜进行移动和调焦。
19.更优选地,所述第二驱动机构包括设置于所述显微镜的镜头内的转鼓,能够改变所述显微镜的变倍倍数。
20.优选地,所述远程手术显微镜设备还包括:
21.第二图像采集装置,其用于采集手术场景的图像;
22.所述第二图像采集装置和所述控制器电性连接。
23.更优选地,所述第二图像采集装置通过安装杆设于所述支架的顶部,所述安装杆的一部分水平设置或倾斜设置以使所述第二图像采集装置在水平方向上偏离所述支架一端距离。
24.进一步地,所述第二图像采集装置为360度全景摄像头。
25.优选地,所述第一图像采集装置和/或所述第二图像采集装置分别为ccd摄像机。
26.优选地,所述通信设备为wifi6或5g通信设备。
27.更优选地,所述远程手术显微镜设备还包括脚踏装置,所述脚踏装置和所述控制器电性连接。
28.更优选地,所述远程手术显微镜设备还包括控制箱,所述控制箱设置在所述支架上,所述控制器设置于所述控制箱内,所述控制器通过导线和所述第一驱动机构、所述第二驱动机构、第一图像采集装置或显示屏电性连接。
29.进一步地,所述远程手术显微镜设备还包括用于检测所述显微镜整体的位置和/或所述显微镜的用于变倍的转鼓的位置的检测传感器,所述检测传感器和所述控制器电性连接。
30.优选地,所述远程手术显微镜设备还包括照明光源,所述照明光源和所述控制器电性连接。
31.更优选地,所述照明光源为led灯。
32.更优选地,所述远程手术显微镜设备为远程眼科手术显微镜设备。
33.本实用新型采用上述技术方案,相比现有技术具有如下优点:
34.本实用新型的一种远程手术显微镜设备,控制器电性连接通信设备和第一驱动机构和/或第二驱动机构,远程端能够通过通信设备及控制器控制显微镜的移动和/或变倍,以对手术视野进行远程调节使远程端在专家会诊或教学的过程中更好地观察到手术情况,并进行沟通与指导,实现良好且及时的互动,实时性强,通过远程端与手术端的共同协作,较好地完成手术工作。
附图说明
35.为了更清楚地说明本实用新型的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
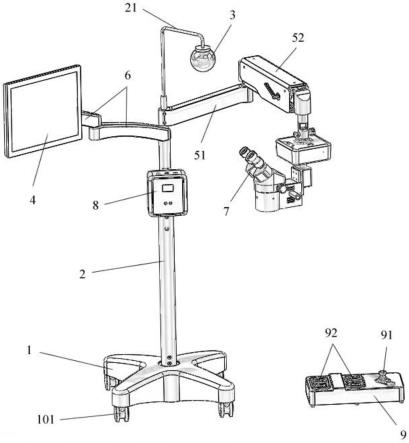
36.图1为本实用新型实施例的一种远程手术显微镜设备的结构示意图;
37.图2为本实用新型实施例的一种远程手术显微镜设备的主视图;
38.图3为本实用新型实施例的一种远程手术显微镜设备的后视图;
39.图4为本实用新型实施例的一种远程手术显微镜设备的结构框图;
40.图5为本实用新型实施例的一种远程手术显微镜设备的应用场景示意图。
41.其中,
42.1、底座;101、万向轮;2、支架;21、安装杆;3、第二图像采集装置; 4、显示屏;5、第一驱动机构;51、第一悬臂;52、第二悬臂;53、导杆;6、第三悬臂;7、显微镜;8、控制箱;9、脚踏装置;91、摇杆;92、踏板;10、控制器;11、第一驱动电机;12、第二驱动电机;13、照明光源;
14、通信设备;15、第一图像采集装置。
具体实施方式
43.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域的技术人员理解。在此需要说明的是,对于这些实施方式的说明用于帮助理解本实用新型,但并不构成对本实用新型的限定。此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以互相结合。
44.参照图1至图4所示,本实施例提供的一种远程眼科手术显微镜设备,能够用于在远程专家指导与教学下完成眼科手术。该远程眼科手术显微镜设备包括设置于底座1上的支架2、设置于支架2上的第二图像采集装置3、显微镜7、显示屏4及控制器10。底座1的下方设有四个万向轮101。显微镜7还能够由第二驱动机构驱动进行变倍。
45.远程手术显微镜设备还包括设于支架2上的第二图像采集装置3,第二图像采集装置3用于采集手术场景的图像,通过安装杆21设于支架2的顶部。安装杆21的一部分沿竖直方向延伸,另一部分沿水平方向延伸以使所述第二图像采集装置3在水平方向上偏离支架一端距离,以获得更大的视角和更全面的视野。第二图像采集装置3为搭载360度全景摄像头的ccd摄像机,能够为远程端更好地显示手术时的实况场景。
46.远程手术显微镜设备还包括显微镜7,显微镜7能够由第一驱动机构5驱动沿xy平面移动或沿z轴移动,从而实现显微镜7的移动及调焦。第一驱动机构5包括相互连接的第一悬臂51和第二悬臂52,第一悬臂51可相对支架2 沿水平方向转动地安装在支架2上,能够使显微镜7沿xy平面移动。具体地,第二悬臂52能够相对第一悬臂51水平方向转动地连接于第一悬臂51,显微镜 7能够沿z轴上下移动地设置于第二悬臂52上,进而显微镜7能够沿xy平面及z轴移动。本实施例中,一沿z轴延伸的导杆53与第二悬臂52连接,显微镜7可沿z轴移动地设置于导杆53上。
47.第一驱动机构5包括用于分别驱动悬臂沿xy平面及z轴移动的第一驱动电机11,第二驱动机构包括用于变倍的转鼓,转鼓能够改变显微镜7的变倍倍率,转鼓设于显微镜7的镜头内。控制器10具体包括dsp芯片和mcu芯片,利用dsp芯片高速实时的特点完成数据采集以及控制输出,mcu芯片负责人机交互,两者通过串口通信或总线方式连接。
48.该远程眼科手术显微镜设备还包括用于采集显微镜7视野内的图像的第一图像采集装置15,第一图像采集装置15为ccd摄像机,设置于显微镜7内。
49.该远程眼科手术显微镜设备还包括用于检测显微镜7的用于变倍的转鼓的位置的检测传感器,在变倍时,检测传感器能够使医护人员或根据转鼓的实际位置更好地进行变倍。检测传感器与控制器10电性连接,设置于显微镜7上。
50.该远程眼科手术显微镜设备还包括设于支架2上的显示屏4,显示屏4通过两个相转动连接的第三悬臂6安装于支架2上,其中,靠近支架2的第三悬臂6能够相对支架2在水平面内旋转,另一个第三悬臂6能够相对于靠近支架 2的第三悬臂6在水平面内旋转,能够使显示屏4在很大的范围内旋转摆动。显示屏4能够进行分屏,左侧显示由第一图像采集装置15采集的显微镜7视野内的手术场景,右侧显示由第二图像采集装置3采集的手术室实时画面,具有良好的互动性。
51.该远程眼科手术显微镜设备还包括用于与远程端交互的通信设备14,通信设备14
为wifi6或5g通信设备,该通信设备14能够充分发挥wifi6或5g的网络优势,在进行远程专家会诊或教学工作时,实现远程端与手术端的良好互动,网络延迟小,实时性强。
52.该远程手术显微镜设备还包括用于提供光源的照明光源13,该照明光源 13优选为led灯,能够在手术场地光照条件不足的情况下补足光照。远程端能够控制照明光源13的亮度,保障手术及远程交流的顺利进行。
53.控制器10和通信设备14设于固定于支架2上的控制箱8中,控制器10 分别与通信设备14和照明光源13电性连接,控制器10还分别通过导线与通信设备14、第一驱动机构5、第二驱动机构、第一图像采集装置15、第二图像采集装置3及显示屏4电性连接。
54.远程手术显微镜设备还包括脚踏装置9,脚踏装置9上设有控制开关,用于给控制器10发出指令,控制开关包括摇杆91和踏板92,摇杆91用于发出信号至第一驱动机构,踏板92用于发出信号至第二驱动机构。
55.如图4所示,为本实施例的一种远程手术显微镜设备的结构框图,显示出该远程手术显微镜设备中各组成部分及其连接关系。控制器10与用于驱动显微镜7沿xy平面及z轴移动的第一驱动电机11及用于驱动显微镜7进行调焦的第二驱动电机12电性连接,第一驱动电机11能够驱动显微镜7沿xy平面及z轴的移动和调焦,第二驱动电机12能够使转鼓转动,转鼓能够使显微镜7 完成变倍;控制器10与脚踏装置9电性连接,手术端的医护人员可以通过脚踏装置9上的摇杆91和踏板92分别控制显微镜7的移动、调焦及变倍;控制器10还与照明光源13电性连接,从而调节手术室的光照强度;更重要的是,能够与云端交互并与远程端进行通信的wifi6或5g通信设备14与控制器10 电性连接,远程端在进行远程专家会诊或教学时,能够在远程端对显微镜7的移动、调焦和变倍及手术室的光照强度进行调节,控制器10还和用于采集显微镜7内视野的第一图像采集装置15和用于采集手术场景的第二图像采集装置3电性连接,远程端能够获取手术端的显微镜内视野及手术室的实时场景,并在与控制器10电性连接的显示屏4上分屏互动。如图5所示,显示出了本实施例的一种远程手术设备的实际应用场景,若是采用手术机器人进行手术,则远程端或手术端也可以通过通信设备发送指令至云端,手术机器人的通信模块接收指令后,根据指令进行手术。机器人端也具备传感器,能够将手术的实时状况发送至云端,便于远程端或手术端对手术状况进行把控,实现良好的人机交互。
56.综上所述,本实施例的一种远程手术显微镜设备,基于低延迟、高及时反馈性的wifi6或5g通信设备14与控制器10电性连接,远程端能够控制显微镜7的移动、调焦及变倍,延迟较低,实时反馈性强。控制器10还与检测转鼓位置的检测传感器电性连接,故可以根据物镜的实际位置更好地进行变倍。远程端可以借助第一图像采集装置15及第二图像采集装置3观察手术的实时状况,不仅能够在显示屏4上同步展示,进行分屏,使远程端与手术端都能够清楚地了解到彼此的情况,并进行视频通话和语音通话进行实时沟通,在需要时远程端不仅能够控制显微镜7的移动、调焦及变倍,还能够控制照明光源13 的强弱,从而更好地观察手术情况,进行诊断,以对手术进行进一步的远程指导,通过远程端与手术端的共同协作,强强联合,更好地完成手术工作;还可采用脚踏装置9由手术人员来控制显微镜7的移动、调焦及变倍;借助此远程手术显微镜设备完成手术,能够提高手术质量,达到良好的手术效果。
57.上述实施例只为说明本实用新型的技术构思及特点,是一种优选的实施例,其目
的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型的精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1