储能脚掌及其应用的义肢的制作方法
1.本实用新型涉及人工假肢技术领域,更具体地说,涉及储能脚掌及其应用的义肢。
背景技术:
2.近年来,随着汽车的普及而引发的交通事故,以及由于生活方式改变带来的各种疾病,不断发生的自然灾害,都导致每年都有成千上万的人遭受肢体残疾甚至是截肢的侵害。大腿截肢者丧失了膝关节和踝关节,身体形态和运动能力受到严重影响,同时截肢带来了巨大的心理压力,严重影响患者的生活。
3.足跟离地到足尖开地,支撑中期结束后着地足脚跟开始离地,对侧足脚跟着地,进入双足支撑期,身体重心开始向对侧足转移。髋关节达到最大伸展值后开始向屈曲过渡,大腿前移,同时膝关节屈曲值增加,将小腿抬起,踝关节由背屈状态向跖屈状态过渡,在脚尖离地时跖屈值达到最大,足部表现为脚尖向后蹬地,推动身体前移。但是现有技术中,储能脚掌的大拇指区域与余下脚趾区域均与脚掌一体成型,导致大拇指区域的跖屈力和余下脚趾区域的跖屈力相近,导致使用者在佩戴义肢的过程中,义肢会不自觉地向脚外侧偏移,影响使用体验。
技术实现要素:
4.本实用新型的目的之一是提供一种储能脚掌,其首端的内外两侧设有第一指板和第二指板,其中第一指板与脚板固定连接,第二指板与脚板铰接,以此增大第一指板与第二指板的跖屈力的差,使单脚的重心偏向脚掌的内侧。
5.本实用新型实施例所采取的技术方案是:提供一种储能脚掌,包括有脚板,所述脚板包括有主体和第一指板,且所述第一指板位于所述主体首端内侧,所述主体首端外侧铰接有第二指板,所述第一指板一侧连接有限位板,所述限位板一端位于所述第二指板的下方,使所述第二指板一侧能够搭在所述限位板上。
6.采用以上结构后,脚板用来仿生脚底板,第一指板用来仿生脚掌的大拇指区域,该区域相当于大拇指和二趾,第二指板用来仿生脚板余下脚趾区域,该区域相当于三趾、次小趾和小趾。其中第二指板与脚板铰接,以此削弱第二指板区域的受力能力,减小该区域的的跖屈力,使得第一指板区域作为脚板前端的受力主体,导致第一指板的跖屈力大于第二指板区域的跖屈。限位板的设置,用以限定第二指板向下弯折,避免储能脚掌在悬空的状态下,第二指板向下弯折导致脚掌面不同这一情形的发生。在跖屈时单脚的中心偏向脚掌的内侧,进而解决义肢向外侧偏移的问题,提高使用者的使用体验。
7.在一些实施例中,所述脚板包括第一柔性构件、第二柔性构件和三角支撑件,所述第一指板位于所述第二柔性构件上,所述第二指板与所述第二柔性构件铰接,所述第一柔性构件倾斜设置在所述第二柔性构件表面,所述三角支撑件设置在所述第二柔性构件上,且所述三角支撑件与第一柔性构件连为一体;倾斜设置的第二柔性构件用来提高脚掌的厚度,以便于储能脚掌表面涂覆橡胶制成美观义足,第二柔性构件适用贴附地面,为脚掌的主
要受力区域,第一柔性构件、第二柔性构件和三角支撑件彼此连接形成一个三角制成结构。
8.在一些实施例中,还包括制动器和缓冲板,所述制动器和所述缓冲板分别与所述三角支撑件铰接,所述制动器的制动端与所述缓冲板的一面相抵,使所述缓冲板的另一面与所述第一柔性构件表面相抵。
9.在一些实施例中,所述缓冲板上设有与所述制动器制动端配合的凹槽;凹槽的设置用以防止制动器沿其铰接轴发生偏转。
10.在一些实施例中,所述制动器选自电动马达、弹簧中的一种;制动器适用作为脚掌脚跟部分的受力支撑结构。
11.在一些实施例中,所述第一柔性构件远离所述第二柔性构件的一端具有弯折部;弯折部的设置,一方面是通过第一柔性构件自身的韧性来仿生人体的脚踝区域,另一方面是提供一个平整的平面,避免因第二柔性构件倾角的存在导致第一柔性构件与移至连接时,连接处两侧的受力不均。
12.本实用新型的目的之二是提供一种带有储能脚掌的义肢。
13.一种义肢,包括上述任一的储能脚掌。
14.在一些实施例中,还包括小腿义肢本体,所述小腿义肢本体通过承接座连接所述脚板。
15.在一些实施例中,所述承接座具有连接部和夹持部,所述连接部适于连接所述小腿义肢本体,所述夹持部适于夹持所述脚板。
附图说明
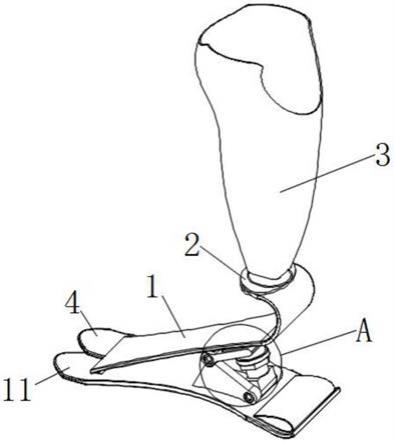
16.图1为本实用新型实施例中应用储能脚掌义肢的立体结构图;
17.图2为图1中a处的局部放大图;
18.图3为本实用新型实施例中储能脚掌的结构示意图;
19.图4为图3中沿b-b线的剖面图;
20.图5为图1中应用储能脚掌义肢的后视图;
21.图6为图5中沿c-c线的剖面图;
22.图7为本实用新型实施例中承接座的结构示意。
23.图中标号说明:
24.1、脚板;11、第一指板;12、第一柔性构件;13、第二柔性构件;14、三角支撑件;15、弯折部;16、连接孔;2、承接座;21、连接部;22、夹持部;3、小腿义肢本体;4、第二指板;5、制动器;6、缓冲板;7、连接件;8、限位板。
具体实施方式
25.下面详细描述本实用新型的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
26.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的
方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征,用于区别描述特征,无顺序之分,无轻重之分。
27.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
28.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
29.本实用新型旨在提供一种储能脚掌,其首端的内外两侧设有第一指板11和第二指板4,其中第一指板11与脚板1固定连接,第二指板4与脚板1铰接,以此增大第一指板11与第二指板4的跖屈力的差,使单脚的重心偏向脚掌的内侧。
30.为了更好的上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
31.实施例1
32.如图1所示,本实施例提供一种储能脚掌,包括有脚板1,脚板1包括有主体和第一指板11,且第一指板11位于主体首端内侧,主体首端外侧铰接有第二指板4,第一指板11一侧连接有限位板8,限位板8一端位于第二指板4的下方,使第二指板4一侧能够搭在限位板8上。
33.进一步的,脚板1具有相对的首尾两端,其中脚板1的首端仿生人脚的脚趾区域,脚板1的后端仿生人脚的脚跟区域。在脚板1的首端分割成内外两个区域,分别为内外侧。其中的内侧与外侧的区分取决于储能脚掌所处位置。例如储能脚掌为左脚时,脚板1首端的内侧位于脚板1首端的右半区域,相对的左半区域为脚板1首端的外侧;储能脚掌为右脚时,脚板1首端的内侧位于脚板1首端的左半区域,相对的右半区域为脚板1首端的外侧。
34.更进一步的,结合图4所示,第二指板4外侧边沿比其内侧边沿厚,第一指板11外侧边沿比其内侧边沿薄。在一些实施例中,第一指板11底部设有限位板8,限位板8悬空,且限位板8向第二指板4方向延伸,第二指板4自然下垂,第二指板4内侧边沿搭靠与限位板8表面。第二指板4除却与限位板8搭接区域的底表面和第一指板11的底表面处于同一平面上。在跖屈时,第一指板11受力弯曲,第一指板11通过限位板8带动第二指板4沿铰接轴旋转。
35.具体的,脚板1包括第一柔性构件12、第二柔性构件13和三角支撑件14,第一指板11位于第二柔性构件13上,第二指板4与第二柔性构件13铰接,第一柔性构件12倾斜设置在第二柔性构件13表面,三角支撑件14设置在第二柔性构件13上,且三角支撑件14与第一柔性构件12连为一体。
36.进一步的,如图3所示,第一柔性构件12的一端与第二柔性构件13的一端固定连接,两者之间的连接处位于脚板1的首端位置。三角支撑件14设置在第二柔性构件13的表面上,三角支撑件14的上端与第一柔性构件12的底表面固定连接。
37.更进一步的,第一柔性构件12、第二柔性构件13、第一指板11和第二指板4均采用碳纤维材料,三角支撑件14为轻质金属材料,如铝合金材料或钛合金材料。
38.具体的,还包括制动器5和缓冲板6,制动器5和缓冲板6分别与三角支撑件14铰接,制动器5的制动端与缓冲板6的一面相抵,使缓冲板6的另一面与第一柔性构件12表面相抵。
39.进一步的,三角支撑件14上与缓冲板6铰接,使缓冲板6沿铰接轴旋转。结合图2所示,制动器5具有相对的两端,其中一端与三角支撑件14铰接,另一端为制动器5的制动端,该制动端与缓冲板6的一表面相抵,是缓冲板6的另一表面与第一柔性构件12底表面相抵。
40.具体的,缓冲板6上设有与制动器5制动端配合的凹槽。
41.结合图2所示,凹槽设置在缓冲板6的底表面上,制动器5顶端的制动端与该凹槽适配。
42.具体的,制动器5选自电动马达、弹簧中的一种,在本实施例中,制动器5采用气动弹簧。
43.具体的,第一柔性构件12远离第二柔性构件13的一端具有弯折部15。
44.进一步的,结合图3所示,第二柔性构件13置于地面或水平面上,第一柔性构件12远离第二柔性构件13的一端具有弯折部15,该弯折部15的存在,使得第一柔性构件12的端部弯曲至与水平面或地面平行。
45.更进一步的,弯折部15上设有连接孔16。
46.实施例2
47.结合图1和图5所示,本实施例提供一种义肢,其包括实施例1中的储能脚掌。
48.具体的,本实施例中的义肢还包括小腿义肢本体3,小腿义肢本体3通过承接座2连接脚板1。
49.进一步的,小腿义肢本体3适于连接人体的腿部残肢,其内部具有一容纳残肢端部的空间,其上端具有一开口,使用供残肢放入其内部空间内。小腿义肢本体3的底端通过承接座2与储能脚掌连接。
50.具体的,承接座2具有连接部21和夹持部22,连接部21适于连接小腿义肢本体3,夹持部22适于夹持脚板1。
51.进一步的,结合图6和图7所示,承接座2的上端具有与小腿义肢本体3连接的连接部21,承接座2上具有夹持部22,第一柔性构件12上的弯折部15与该夹持部22适配。并通过一连接件7将第一柔性构件12与承接座2连为一体。
52.更进一步的,连接件7为一螺栓,其与承接座2螺纹连接并穿过弯折部15上的连接孔16,适于限定第一柔性构件12,防止其发生移动。
53.以上就本实用新型较佳的实施例作了说明,但不能理解为是对权利要求的限制。本实用新型不仅局限于以上实施例,其具体结构允许有变化,凡在本实用新型独立要求的保护范围内所作的各种变化均在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1