手术系统、控制装置以及手术系统的工作方法与流程
1.本发明涉及一种手术系统、控制装置以及手术系统的工作方法。
背景技术:
2.关节镜下手术是如下一种手术:在处置对象的关节处开切口,将关节镜和处置器具自切口插入到处置对象的关节中,在用灌流液充满关节腔中的状况下,一边使用关节镜观察关节腔中一边进行处置的手术。
3.国际公开第2018/078830号(专利文献1)公开了一种在关节镜下手术中使用的关节镜下手术系统。另外,在专利文献1中公开了用于对骨形成孔的超声波处置器具。该超声波处置器具构成为处置器具的前端进行超声波振动。当手术操作者将处置器具的前端抵接于骨并按下对处置器具赋予超声波振动的开关时,处置器具的前端对骨进行切削来在骨上形成孔。当处置器具的前端对骨进行切削时,产生骨的切削碎屑(骨粉)。
4.现有技术文献
5.专利文献
6.专利文献1:国际公开第2018/078830号
技术实现要素:
7.发明要解决的问题
8.然而,存在如下情况:切削时所产生的骨粉暂时分散到灌流液中,从而灌流液浑浊,导致阻碍了用于观察处置对象的关节镜的视野。在该情况下,手术操作者必须停手,有时会对患者、手术操作者造成负担。
9.本发明是鉴于上述情况而完成的,其目的在于提供一种通过探测灌流液中的浑浊并进行规定的控制来减轻给予患者、手术操作者的负担的手术系统、控制装置以及手术系统的工作方法。
10.用于解决问题的方案
11.为了解决上述问题并达成目的,本发明所涉及的手术系统设置有:处置器具装置,其用于在液体中对生物体组织进行处置;探测部,其探测与通过所述处置器具装置而产生的所述液体中的浑浊有关的信息;以及控制部,其基于所述探测部的探测结果来进行所述手术系统的控制。
12.另外,本发明所涉及的控制装置是手术系统的控制装置,所述手术系统向处置对象供给灌流液并在所述灌流液中对生物体组织进行处置,所述控制装置具备:显示装置,其能够与内窥镜装置或处置器具装置连接;以及至少一个以上的控制装置,其中,所述控制装置进行以下处理:经由所述显示装置从所述内窥镜装置或所述处置器具装置接收信息;基于所述信息来探测所述灌流液是否浑浊;在所述灌流液浑浊的情况下,转变为第一控制;以及在所述灌流液不浑浊的情况下,转变为第二控制。
13.另外,本发明所涉及的手术系统的工作方法为,所述手术系统具备:内窥镜装置;
灌流装置,其向处置对象供给灌流液;以及处置器具装置,其用于在存在于所述处置对象内的所述灌流液中对生物体组织进行处置,在所述手术系统的工作方法中,进行以下处理:探测所述灌流液是否浑浊;在所述灌流液浑浊的情况下,转变为第一控制;以及在所述灌流液不浑浊的情况下,转变为第二控制。
14.发明的效果
15.根据本发明所涉及的手术系统、控制装置、工作方法,能够减轻给予患者、手术操作者的负担。
附图说明
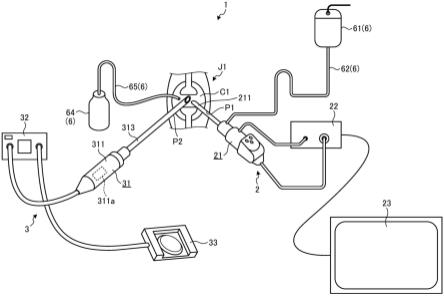
16.图1是示出实施方式所涉及的手术系统的概要结构的图。
17.图2是示出使用实施方式所涉及的手术系统的处置流程的图。
18.图3是示出使用实施方式所涉及的手术系统的切削处置流程的图。
19.图4a是示出使用实施方式所涉及的手术系统的浑浊探测流程的一例的图。
20.图4b是示出使用实施方式所涉及的手术系统的浑浊探测流程的一例的图。
21.图5a是示出浑浊探测的第一实施方式所涉及的内窥镜视野与对比度的值之间的关系的图。
22.图5b是示出浑浊探测的第一实施方式所涉及的浑浊探测的条件的一例的图。
23.图5c是示出浑浊探测的第一实施方式所涉及的浑浊探测的条件的一例的图。
24.图6a是示出浑浊探测的第一实施方式的第一变形例所涉及的内窥镜视野与边缘之间的关系的图。
25.图6b是示出浑浊探测的第一实施方式的第一变形例所涉及的浑浊探测的条件的一例的图。
26.图6c是示出浑浊探测的第一实施方式的第一变形例所涉及的浑浊探测的条件的一例的图。
27.图7a是示出浑浊探测的第一实施方式的第二变形例所涉及的内窥镜视野与亮度之间的关系的图。
28.图7b是示出浑浊探测的第一实施方式的第二变形例所涉及的浑浊探测的条件的一例的图。
29.图7c是示出浑浊探测的第一实施方式的第二变形例所涉及的浑浊探测的条件的一例的图。
30.图8a是示出浑浊探测的第一实施方式的第三变形例所涉及的内窥镜视野与图像差分的关系的图。
31.图8b是示出浑浊探测的第一实施方式的第三变形例所涉及的浑浊探测的条件的一例的图。
32.图9a是示出使用浑浊探测的第二实施方式所涉及的手术系统的浑浊探测流程的一例的图。
33.图9b是示出使用浑浊探测的第二实施方式所涉及的手术系统的浑浊探测流程的一例的图。
34.图9c是示出浑浊探测的第二实施方式所涉及的浑浊探测的条件的一例的图。
35.图9d是示出浑浊探测的第二实施方式所涉及的浑浊探测的条件的一例的图。
36.图10a是示出浑浊探测的第三实施方式所涉及的浑浊探测的条件的一例的图。
37.图10b是示出浑浊探测的第三实施方式所涉及的浑浊探测的条件的一例的图。
38.图11是示出浑浊应对控制的第一实施方式所涉及的内窥镜显示的一例的图。
39.图12是示出浑浊应对控制的第三实施方式所涉及的手术系统的图。
40.图13是示出浑浊应对控制的第三实施方式的第一变形例所涉及的手术系统的图。
41.图14是示出浑浊应对控制的第三实施方式的第二变形例所涉及的手术系统的图。
具体实施方式
42.下面,参照附图来对用于实施本发明的方式(下面为实施方式)进行说明。此外,本发明不受下面说明的实施方式所限定。并且,在附图的记载中,对相同的部分标注相同的标记。
43.[手术系统概要]
[0044]
上述本实施方式的手术系统1具备处置器具装置3(图1)。
[0045]
并且,手术系统1具备内窥镜装置2、处置器具装置3以及灌流装置6。手术操作者能够通过该手术系统1来进行前交叉韧带重建手术。
[0046]
内窥镜装置2具备内窥镜21、第一控制装置22以及显示装置23(图1)。
[0047]
内窥镜21的插入部211的一部分被从第一切口p1插入到膝关节j1的关节腔c1内,该第一切口p1将该关节腔c1内与皮肤外连通。然后,内窥镜21向关节腔c1内照射,接收在该关节腔c1内反射了的照明光(被摄体像),来拍摄该被摄体像。
[0048]
第一控制装置22以有线或无线方式与内窥镜21及显示装置23连接。第一控制装置22针对由内窥镜21拍摄得到的摄像数据执行各种图像处理,并且使显示装置23显示该图像处理后的摄像图像。
[0049]
处置器具装置3具备处置器具31、第二控制装置32以及脚踏开关33(图1)。
[0050]
处置器具31具备主体311、超声波探针(未图示)以及护套313(图1)。处置器具31的护套313及超声波探针的一部分被从第二切口p2插入到膝关节j1的关节腔c1内,该第二切口p2将该关节腔c1内与皮肤外连通。
[0051]
主体311形成为圆筒状。而且,在主体311的内部收纳有超声波振子311a,该超声波振子311a由螺栓紧固朗之万型振子(bolt-clamped langevin-type transducer)构成,并且根据被供给的驱动电力而产生超声波振动。
[0052]
第二控制装置32响应于手术操作者对脚踏开关33等的操作而对超声波振子311a供给该驱动电力。
[0053]
灌流装置6具备液体源61、送液管62、排液瓶64以及排液管65(图1)。
[0054]
液体源61容纳灌流液。例如有生理盐水的灭菌袋。送液管62的一端与液体源61连接,另一端与内窥镜21连接。并且,通过将液体源61固定在比内窥镜21高的位置,由此灌流液经由送液管62而被送出到关节腔c1内。由此能够利用灌流液来充满关节腔c1内。
[0055]
另一方面,为了排出存在于关节腔c1内的灌流液而具有排液管65和排液瓶64。排液瓶64与排液管65连接,用于容纳经由排液管65排出的存在于关节腔c1内的灌流液等。并且,通过将排液瓶64固定在比关节腔c1低的位置,由此灌流液经由排液管65而被排出到关
节腔c1外。
[0056]
此外,图1所示的实施方式通过第一控制装置22和第二控制装置32来构成,但作为其它实施方式,也可以通过以能够与内窥镜21及处置器具31连接的方式设置并能够分别进行控制的一个控制装置来构成。
[0057]
[处置流程]
[0058]
参照图2来说明手术操作者使用手术系统1进行的处置流程。
[0059]
手术操作者形成将膝关节j1的关节腔c1内与皮肤外连通的第一切口p1及第二切口p2(s1)。接着,手术操作者将内窥镜21和处置器具31分别从第一切口p1和第二切口p2插入到关节腔内c1(s2)。
[0060]
虽然上述中记载为在形成两个切口后插入内窥镜21和处置器具31,但也可以在形成第一切口p1并插入内窥镜21后,形成第二切口p2并插入处置器具31。
[0061]
接着,手术操作者一边在显示装置23中确认由内窥镜21拍摄到的关节腔c1内的情形,一边使处置器具31的超声波探针抵接于处置对象(s3)。
[0062]
在使处置器具31抵接于处置对象之后,进行切削处置(s4)。
[0063]
作出能够将移植肌腱插入的骨孔。将移植肌腱插入到作出的骨孔中并进行固定(s5)。
[0064]
之后,分别从第一切口p1和第二切口p2拔出内窥镜21和处置器具31(s6),将第一切口p1和第二切口p2进行缝合(s7),从而结束手术操作者使用手术系统1进行的处置流程。
[0065]
关于“手术操作者”,说明了一名医生的情况,但也可以由医生和助手来适当地分担。
[0066]
[切削处置流程]
[0067]
接着,参照图3来对切削处置(s4)的详细的流程进行说明。
[0068]
第二控制装置32基于安装于主体311的超声波探针来读入设定(s41)。读入设定的定时既可以是在切削处置的初期,也可以是紧接在第二控制装置32的主电源接通且超声波探针被安装于主体311之后。另外,该设定也可以由手术操作者或助手预先输入。
[0069]
接着,开始通常控制(s42)。该通常控制是以往进行的手术系统的控制。
[0070]
接着,第一控制装置22基于与浑浊有关的信息来进行浑浊探测(s43)。第一控制装置22将浑浊的探测结果发送到第二控制装置32。在探测到浑浊的情况下(“浑浊探测=1”),第二控制装置32进入浑浊应对控制(s44),在未探测到浑浊的情况下(“浑浊探测=0”),进行通常控制(s45)。作为例外,在即使未探测到浑浊但手术操作者或助手选择了浑浊应对控制的情况下,与探测到浑浊的情况(“浑浊探测”=1)同样地进入浑浊应对控制s44。对于具体的浑浊探测和浑浊应对控制在后面记述。后述的浑浊探测和浑浊应对控制可以使用任意的组合。
[0071]
在浑浊应对控制s44和通常控制s45之后,确认处置器具31的电源是否关闭(s46)。在电源未关闭的情况下(“否”),返回到浑浊探测s43。在电源关闭的情况下(“是”),结束切削处置。
[0072]
[浑浊探测]
[0073]
接着,在下面具体地说明基于与浑浊有关的信息来进行浑浊探测的若干方法。在此,与浑浊有关的信息是指根据由内窥镜装置2生成的摄像数据得到的值、灌流液的物性
值、从处置器具装置3获取到的阻抗等。
[0074]
[浑浊探测的第一实施方式:对比度]
[0075]
浑浊探测的第一实施方式是从由内窥镜装置2生成的摄像数据中获取与浑浊有关的信息来探测浑浊的实施方式。通过第一控制装置22来实现实施方式,该第一控制装置22具备存储由内窥镜装置2生成的摄像数据的存储装置(未图示)。该存储装置也可以是外部装置。另外,在浑浊探测的第一实施方式中,探测部被设置于第一控制装置22。
[0076]
接着,具体地示出浑浊探测的第一实施方式的探测方法。浑浊探测的第一实施方式是利用由内窥镜装置2生成的摄像数据的对比度来探测浑浊的方法。
[0077]
使用图4a来说明利用对比度进行浑浊探测的方法的一例。
[0078]
第一控制装置22读入来自内窥镜装置2的第一摄像数据,并存储到设置于第一控制装置22的存储装置(s431)。之后,第一控制装置22使用公知的技术计算第一摄像数据的对比度c0(第一值)(s432)。接着,设置于第一控制装置22的探测部读入从内窥镜装置2输出的第二摄像数据(s433),使用公知的技术计算第二摄像数据的对比度c1(第二值)(s434)。接着,设置于第一控制装置22的探测部将c0与c1的大小进行比较(s435)。在c1较小的情况下,判断为探测到浑浊,设为浑浊探测=1(s436:参照图5b)。在c1与c0相等或c1较大的情况下,设为未探测到浑浊而设为浑浊探测=0(s437:参照图5b)。得出检测结果后结束浑浊探测的流程。
[0079]
此外,第一摄像数据是在第二摄像数据的数秒前或数帧前拍摄的摄像数据。
[0080]
另外,使用图4b来说明使用与图5b的条件不同的条件的浑浊探测的方法。
[0081]
设置于第一控制装置22的探测部读入预先设定的阈值(s430)。之后,设置于第一控制装置22的探测部如上述那样进行s431至s434。之后,设置于第一控制装置22的探测部取得c0与c1之差来计算变化量,基于计算出的变化量来判定是否产生了浑浊(s438:参照图5c)。
[0082]
在此,关于阈值,既可以预先设定数值,也可以使用收集产生浑浊的图像和未产生浑浊的图像进行机械学习而计算出的阈值。
[0083]
浑浊的原因例如是骨粉或乳化的髓液等。因此,浑浊的颜色本身为白色。因此,当将通常时与浑浊产生时的内窥镜视野相比时,对比度值变低(参照图5a)。由此,能够不依赖内窥镜21的照明的颜色而探测浑浊。
[0084]
[浑浊探测的第一实施方式的第一变形例:边缘]
[0085]
接着,示出浑浊探测的第一实施方式的第一变形例。浑浊探测的第一实施方式的第一变形例是设置于第一控制装置22的探测部将第一摄像数据与第二摄像数据的边缘进行比较并基于边缘的变化量来探测浑浊的方法。
[0086]
在此,第一摄像数据是在第二摄像数据的数秒前或数帧前拍摄的摄像数据。
[0087]
当浑浊产生时,生物体组织(例如骨)、处置器具31变得不可见。即,不再能够拍摄到生物体组织的边缘、处置器具31的边缘(参照图6a)。因此,通过探测边缘的减少来探测浑浊。由此,能够不依赖内窥镜的照明的颜色来探测浑浊。
[0088]
浑浊探测的具体的流程与图4a相同。设置于第一控制装置22的探测部使用公知的技术来根据第一摄像数据计算边缘e0,而代替s432中的c0的计算。之后,代替s435中使用的浑浊探测的条件(c0≤c1)的判断,而使用计算出的边缘e0和同样使用公知的技术根据第二
摄像数据计算出的边缘e1来说明浑浊探测的条件。
[0089]
若e1小于e0,则视为关节腔c1内产生了浑浊,与s436同样地探测到浑浊(参照图6b)。相反地,若e1等于e0或大于e0,则视为关节腔c1内未产生浑浊或浑浊减少,与s437同样地未探测到浑浊(参照图6b)。
[0090]
在上述中,简单地比较了e0与e1的值,但也可以如图4b那样设置阈值,通过将e0与e1之差同阈值进行比较来检测浑浊(参照图6c)。
[0091]
在此,关于阈值,既可以预先设定数值,也可以使用收集产生浑浊的图像和未产生浑浊的图像进行机械学习而计算出的阈值。
[0092]
[浑浊探测的第一实施方式的第二变形例:亮度]
[0093]
接着,示出浑浊探测的第一实施方式的第二变形例。浑浊探测的第一实施方式的第二变形例是将第一摄像数据与第二摄像数据的亮度进行比较并基于亮度的变化量来探测浑浊的方法。
[0094]
在此,第一摄像数据是在第二摄像数据的数秒前或数帧前拍摄的摄像数据。
[0095]
如上所述,浑浊呈白色。因此,当将通常时与浑浊产生时相比时,亮度变高(参照图7a)。由此,能够不依赖内窥镜的照明的颜色而检测浑浊。
[0096]
浑浊探测的具体的流程与图4a相同。设置于第一控制装置22的探测部使用公知的技术根据第一摄像数据来计算亮度r0,而代替s432中的c0的计算。之后,代替s435中使用的浑浊探测的条件(c0≤c1)的判断,而使用计算出的亮度r0和同样使用公知的技术根据第二摄像数据计算出的亮度r1来说明浑浊探测的条件。
[0097]
若r1大于r0,则视为关节腔c1内产生了浑浊,与s436同样地探测到浑浊(参照图7b)。相反地,若r1等于r0或小于r0,则视为关节腔c1内未产生浑浊或浑浊减少,与s437同样地未探测到浑浊(参照图7b)。
[0098]
在上述中,简单地比较了r0与r1的值,但也可以如图4b那样设置阈值,通过将r0与r1之差(变化量)同阈值进行比较来探测浑浊(参照图7c)。
[0099]
在此,关于阈值,既可以预先设定数值,也可以使用收集产生浑浊的图像和未产生浑浊的图像进行机械学习而计算出的阈值。
[0100]
[浑浊探测的第一实施方式的第三变形例:图像差分]
[0101]
接着,示出浑浊探测的第一实施方式的第三变形例。浑浊探测的第一实施方式的第三变形例是将第一摄像数据与第二摄像数据的像素进行比较并计算像素的变化量、将像素的变化量与阈值进行比较来探测浑浊的方法。
[0102]
在此,第一摄像数据是在第二摄像数据的数秒前或数帧前拍摄的摄像数据。
[0103]
浑浊探测的具体的流程除了s432和s434之外与图4b相同。设置于第一控制装置22的探测部不进行s432中的c1的计算,并且代替s434中的c1的计算而获取第一摄像数据和第二摄像数据之间的相同坐标的像素并取得差分,计算各坐标的像素的变化量的绝对值和n。之后,代替s438的浑浊条件中使用的浑浊探测的条件(c1-c0≥阈值)的判断,而使用计算出的绝对值和n以及s430中读入的阈值来说明浑浊探测的条件。若n大于阈值,则视为关节腔c1内产生了浑浊,与s436同样地探测到浑浊。相反地,若n与阈值相等或n小于阈值,则视为关节腔c1内未产生浑浊或浑浊减少,与s437同样地未探测到浑浊(参照图8b)。
[0104]
当浑浊产生时,摄像数据的像素出现变化(参照图8a)。通过检测该变化能够探测
浑浊。
[0105]
[浑浊探测的第二实施方式:根据灌流液的ph来进行浑浊探测]
[0106]
第二实施方式是根据灌流液的物性值来探测浑浊的方法。
[0107]
排液瓶64或内窥镜21的插入部211具备检测灌流液的ph的ph传感器(未图示)。该存储装置也可以是外部装置。设置于排液瓶64或内窥镜21的插入部211的ph传感器被配置在能够接触到灌流液的位置。设置有探测部的第一控制装置22以有线或无线的方式与ph传感器连接,以能够接收来自设置于排液瓶64或内窥镜21的插入部211的ph传感器的检测值。
[0108]
浑浊的原因例如是因处置器具31的处置而产生的骨或髓液等。因此,将未产生浑浊的状态与产生浑浊的状态相比则灌流液的ph发生变化。通过检测该灌流液的ph的变化,能够探测因骨或髓液而引起的浑浊。
[0109]
图9a对浑浊探测的具体的流程的一例进行说明。
[0110]
首先,设置于第一控制装置22的检测部读入预先设定的第一ph w0(s4310)。接着,设置于第一控制装置22的检测部接收由设置于排液瓶64或内窥镜21的插入部211的ph传感器检测出的第二ph w1(s4311)。之后,将设置于第一控制装置22的检测部中存储的第一ph w0与从设置于排液瓶64或内窥镜21的插入部211的ph传感器获取到的ph w1进行比较(s4312)。若w1大于w0(“否”),则视为关节腔c1内产生了浑浊,探测到浑浊(s4313:参照图9c)。相反地,若w1等于w0或小于w0(“是”),则视为关节腔c1内未产生浑浊或浑浊减少,未检测到浑浊(s4314)。
[0111]
另外,使用图9b来说明使用与图9a的条件不同的条件的浑浊探测的方法。
[0112]
设置于第一控制装置22的检测部读入预先设定的阈值(s439)。之后,设置于第一控制装置22的检测部如上述那样进行s4310至s4311。之后,设置于第一控制装置22的检测部取得w0与w1之差来计算变化量,基于计算出的变化量来判定是否产生了浑浊(s4315:参照图9d)。
[0113]
在此,关于阈值,既可以预先设定数值,也可以使用收集产生浑浊时的灌流液的ph和通常时的灌流液的ph进行机械学习而计算出的阈值。
[0114]
[浑浊探测的第三实施方式:根据处置器具的阻抗(粘性)来进行浑浊探测]
[0115]
浑浊探测的第三实施方式是基于从处置器具31获取的阻抗来探测浑浊的方法。该方法通过具备存储装置(未图示)的第二控制装置32来实现,探测部被设置于第二控制装置32。该存储装置也可以是外部装置。
[0116]
浑浊探测的第三实施方式是设置于第二控制装置32的未图示的探测部基于为了对处置器具31进行恒压控制或恒流控制而供给的电流和电压来计算阻抗并根据计算出的阻抗来检测浑浊的方法。
[0117]
浑浊的原因例如是因处置器具31的处置而产生的骨或髓液等。当灌流液中混杂有骨、髓液等生物体组织时,灌流液的粘性发生变化。当灌流液的粘性发生变化时,处置器具31的阻抗发生变化。因此,当将未产生浑浊的状态与产生浑浊的状态相比时,从处置器具31获取的阻抗会发生变化。由此,能够根据阻抗的变化预测粘性来检测浑浊。
[0118]
浑浊探测的具体的流程与图9a相同。
[0119]
设置于第二控制装置32的探测部读入预先设定的第一阻抗i0来代替s4310的w0。之后,计算在任意的定时计算的第二阻抗i1来代替s4311的w1。代替s4312中的浑浊探测(w0
≥w1),而使用读入的第一阻抗i0和计算出的第二阻抗i1来说明浑浊探测的条件。
[0120]
若i1大于i0(“否”),则视为关节腔c1内产生了浑浊,与s4313同样地探测到浑浊(“浑浊探测”=1:参照图10a)。相反地,若i1等于i0或小于i0(“是”),则视为关节腔c1内未产生浑浊或浑浊减少,与s4314同样地未探测到浑浊(“浑浊探测”=0)。
[0121]
在上述中,简单地比较了i0与i1的值,但也可以如图9b那样设置阈值,通过将i0与i1之差同阈值进行比较来检测浑浊(参照图10b)。
[0122]
在此,关于阈值,既可以预先设定数值,也可以使用收集产生浑浊时的阻抗和通常时的阻抗进行机械学习而计算出的阈值。
[0123]
[浑浊探测的其它应用例]
[0124]
以上记载的浑浊探测的方法也可以组合使用。
[0125]
在组合使用2个浑浊探测的情况下,也可以是在双方的探测方法均探测到浑浊时设为浑浊探测=1。在该情况下,即使某一方因误动作探测到了浑浊,但除非双方均探测到浑浊,否则也不会成为浑浊探测=1,因此能够慎重地进行浑浊探测。
[0126]
另外,也可以在任一方的探测方法检测到浑浊时设为浑浊探测=1。在该情况下,即使是小的变化也能够探测到浑浊。
[0127]
在组合使用多个浑浊探测方法的情况下,也可以在对各探测方法加权后进行浑浊探测。
[0128]
[浑浊应对控制]
[0129]
接着,示出图3所示的浑浊应对控制s44的具体例。下面记载的浑浊应对控制的实施方式能够与上述的浑浊探测进行组合。
[0130]
在此,控制部被设置于第一控制装置22和第二控制装置32中的至少一个,构成为能够经由无线或有线来发送和接收探测部的探测结果。控制部基于获取到的探测结果来进行浑浊应对控制。像这样,通过设为能够将探测部的探测结果传递到控制部的结构,由此控制部能够与探测部的配置无关地进行浑浊应对控制。
[0131]
[浑浊应对控制的第一实施方式:边缘叠加图像显示]
[0132]
首先,示出浑浊应对控制的第一实施方式。浑浊应对控制的第一实施方式是如下的浑浊应对控制:当从设置于第一控制装置22和第二控制装置32中的至少一个的探测部接收到浑浊探测结果=1时,将处置器具31、生物体组织的边缘被进行了强调的图像叠加于被输出到显示装置23的内窥镜视野的影像(参照图11)。
[0133]
在本实施方式中,控制部被设置于第一控制装置22。
[0134]
另一方面,本实施方式中的通常控制是进行将没有叠加边缘被进行了强调的图像的内窥镜视野的影像输出到显示装置23的控制。
[0135]
通过将处置器具31、生物体组织的边缘被进行了强调的图像叠加于输出到显示装置23的内窥镜视野的影像,由此即使是有浑浊的状态也能过视觉识别处置器具31的位置、生物体组织的位置,因此手术操作者能够继续进行手术。
[0136]
接着,具体地说明浑浊应对控制的第一实施方式的流程。
[0137]
当从设置于第一控制装置22和第二控制装置32中的至少一个的探测部对设置于第一控制装置22的控制部发送探测浑浊的信号时,设置于第一控制装置22的控制部获取摄像数据,通过公知的方法来提取边缘。之后,设置于第一控制装置22的控制部将提取边缘所
生成的边缘强调图像数据与根据摄像数据生成的通常的图像数据进行叠加,并在显示装置23进行显示。
[0138]
[浑浊应对控制的第二实施方式:处置器具31的驱动电力调整]
[0139]
接着,示出浑浊应对控制的第二实施方式。浑浊应对控制的第二实施方式是如下的浑浊应对控制:当控制部从设置于第一控制装置22和第二控制装置32中的至少一个的探测部接收到浑浊探测结果=1时,将处置器具31的驱动电力降低为第二驱动电力。
[0140]
在本实施方式中,控制部被设置于第二控制装置32。
[0141]
另一方面,本实施方式中的通常控制是利用第一驱动电力来驱动处置器具31的控制,该第一驱动电力是比第二驱动电力大的驱动电力。
[0142]
具体地说明浑浊应对控制的第二实施方式的流程。
[0143]
当从设置于第一控制装置22和第二控制装置32中的至少一个的探测部对设置于第二控制装置32的控制部发送探测浑浊的信号时,设置于第二控制装置32的控制部调整向处置器具31供给的驱动电力。其结果是,处置器具31利用比第一驱动电力低的第二驱动电力来进行超声波振动。
[0144]
通过降低处置器具31的驱动电力能够降低切削速度,减少通过切削产生的生物体组织。其结果是,灌流的速度在浑浊产生时与通常时无变化,因此内窥镜视野内的浑浊减少。
[0145]
由此,无需使处置器具31的超声波振动停止,从而手术操作者能够不中断地继续进行手术。
[0146]
[浑浊应对控制的第二实施方式的第一变形例:处置器具31的驱动电力调整]
[0147]
接着,示出浑浊应对控制的第二实施方式的第一变形例。浑浊应对控制的第二实施方式的第一变形例是当探测到浑浊时利用比第一驱动电力大的第三驱动电力来驱动处置器具31的浑浊应对控制。
[0148]
另外,本实施方式的本变形例中的通常控制是利用第一驱动电力来驱动处置器具31的控制,该第一驱动电力是比第三驱动电力小的驱动电力。
[0149]
示出浑浊应对控制的第二实施方式的第一变形例。具体地说明流程。
[0150]
当从设置于第一控制装置22和第二控制装置32中的至少一个的探测部对设置于第二控制装置32的控制部发送探测浑浊的信号时,设置于第二控制装置32的控制部调整向处置器具31供给的驱动电力。其结果是,处置器具31利用比第一驱动电力大的第三驱动电力来进行超声波振动。
[0151]
通过提高切削处置器具的驱动电力来提高切削速度,能够在短时间内完成处置。在该方法中,由于骨粉的产生量也增加,因此将灌流速度设定为快速则更有效。
[0152]
[浑浊应对控制的第二实施方式的第二变形例:处置器具31的驱动电力调整]
[0153]
接着,示出浑浊应对控制的第二实施方式的第二变形例。浑浊应对控制的第二实施方式的第二变形例是当探测到浑浊时使处置器具31的驱动重复停止和发送的浑浊应对控制。
[0154]
另外,本实施方式的本变形例中的通常控制是断续地驱动处置器具31的控制。
[0155]
具体地说明浑浊应对控制的第二实施方式的第二变形例的流程。
[0156]
当从设置于第一控制装置22和第二控制装置32中的至少一个的探测部对设置于
第二控制装置32的控制部发送探测浑浊的信号时,设置于第二控制装置32的控制部进行使向处置器具31供给的驱动电力重复停止和供给的控制。
[0157]
通过使处置器具31重复振荡和停止,与使得连续地振荡的情况相比,切削时的骨粉的量变少。因此,能够消除内窥镜视野的浑浊,并且手术操作者能够继续进行手术。
[0158]
[浑浊应对控制的第三实施方式:灌流控制]
[0159]
接着,示出浑浊应对控制的第三实施方式。浑浊应对控制的第三实施方式是当探测到浑浊时增加灌流装置6的送水量(提高送水速度)的应对控制。
[0160]
在图12中示出本实施方式的手术系统1a的结构。
[0161]
仅说明与手术系统1之间的不同点。在灌流装置6设置有送水泵63。
[0162]
在本实施方式中,控制部被设置于送水泵63或第一控制装置22。
[0163]
在控制部被设置于第一控制装置22的情况下,构成为第一控制装置22与送水泵63能够以无线或有线方式发送和接收信号。
[0164]
设置于送水泵63或第一控制装置22的控制部基于获取到的探测结果,来生成使从液体源61流向内窥镜21的灌流液的送水量增加为第二送水量的信号,并对送水泵63进行控制。
[0165]
另一方面,本实施方式中的通常控制是以比第二送水量小的第一送水量进行送水的控制。
[0166]
具体地说明浑浊应对控制的第三实施方式的流程。当从设置于第一控制装置22和第二控制装置32中的至少一个的探测部对设置于送水泵63或第一控制装置22的控制部发送探测浑浊的信号时,送水泵63或第一控制装置22的控制部进行以比第一送水量大的第二送水量来输送灌流液的控制。
[0167]
通过以比第一送水量大的第二送水量来输送灌流液,更易于作为浑浊的原因的一例的骨、髓液等生物体组织从关节腔c1通过排液管65而被排出到排液瓶64。由此,内窥镜视野的浑浊被消除,从而手术操作者能够继续进行手术。
[0168]
[浑浊应对控制的第三实施方式的第一变形例:灌流控制]
[0169]
接着,示出浑浊应对控制的第三实施方式的第一变形例。浑浊应对控制的第三实施方式的第一变形例是当探测到浑浊时增加灌流装置6的灌流液的抽吸量的应对控制。
[0170]
在图13中示出本实施方式的本变形例的手术系统1b的结构。仅说明与手术系统1之间的不同点。在灌流装置6设置有抽吸泵66。吸引泵66进行如下控制:使抽吸量增加为比第一抽吸量大的第二抽吸量的控制,该抽吸量是用于使灌流液沿排液管65的流路来将关节腔c1内的灌流液排出到排液瓶64的抽吸量。
[0171]
在本实施方式的本变形例中,控制部被设置于抽吸泵66或第一控制装置22。
[0172]
在控制部被设置于第一控制装置22的情况下,构成为第一控制装置22与抽吸泵66能够以无线或有线方式发送和接收信号。
[0173]
设置于抽吸泵66或第一控制装置22的控制部基于获取到的探测结果,来生成使用于将关节腔c1内的灌流液排出到排液瓶64的抽吸量增加为第二抽吸量的信号,来对抽吸泵66进行控制。
[0174]
另一方面,本实施方式的本变形例中的通常控制是以比第二抽吸量小的第一抽吸量来进行抽吸的控制。
[0175]
具体地说明浑浊应对控制的第三实施方式的流程。当从设置于第一控制装置22和第二控制装置32中的至少一个的探测部对设置于抽吸泵66或第一控制装置22的控制部发送探测浑浊的信号时,设置于抽吸泵66或第一控制装置22的控制部进行使灌流液的抽吸量增加为第二抽吸量的控制。
[0176]
通过将灌流液的抽吸量增加为第二抽吸量,更易于作为浑浊的原因的一例的骨、髓液等生物体组织从关节腔c1通过排液管65而被排出到排液瓶64。由此,内窥镜视野的浑浊被消除,从而手术操作者能够继续进行手术。
[0177]
[浑浊应对控制的第三实施方式的第二变形例:灌流控制]
[0178]
接着,示出浑浊应对控制的第三实施方式的第二变形例。浑浊应对控制的第三实施方式的第二变形例是当探测到浑浊时增加灌流装置6的灌流液的抽吸量和送水量的应对控制。
[0179]
在图14中示出本实施方式的本变形例的手术系统1c的结构。仅说明与手术系统1之间的不同点。在灌流装置6设置有送水泵63和抽吸泵66。
[0180]
在本实施方式中,控制部被设置于送水泵63和抽吸泵66双方、或被设置于第一控制装置22。
[0181]
在控制部被设置于第一控制装置22的情况下,构成为第一控制装置22、送水泵63以及抽吸泵66能够以无线或有线方式发送和接收信号。
[0182]
设置于送水泵63和抽吸泵66双方或设置于第一控制装置22的控制部基于获取到的探测结果,来生成使从液体源61流向内窥镜21的灌流液的送水量增加为第二送水量的信号,来对送水泵63进行控制,另外,生成使用于将关节腔c1内的灌流液排出到排液瓶64的抽吸量增加为第二抽吸量的信号,来对抽吸泵66进行控制。
[0183]
具体地说明浑浊应对控制的第三实施方式的流程。当从设置于第一控制装置22和第二控制装置32中的至少一个的探测部对设置于送水泵63和抽吸泵66双方或设置于第一控制装置22的控制部发送探测浑浊的信号时,设置于送水泵63和抽吸泵66双方或设置于第一控制装置22的控制部进行使灌流液的送水量增加为第二送水量的控制,并且进行使灌流液的抽吸量增加为第二抽吸量的控制。
[0184]
另外,本实施方式的本变形例中的通常控制是以比第二送水量小的第一送水量来对送水进行控制,并且以比第二抽吸量小的第一抽吸量来对抽吸进行控制。
[0185]
通过使灌流液的送水量和抽吸量增加,更易于作为浑浊的原因的一例的骨、髓液等生物体组织从关节腔c1通过排液管65而被排出到排液瓶64。由此,内窥镜视野的浑浊被消除,从而手术操作者能够继续进行手术。
[0186]
也可以是以使灌流液的送水量和抽吸量的增加量相同的方式进行控制。由此,关节腔c1内的灌流液的量被保持为固定,从而给予患者的负担变少。
[0187]
也可以是以在使灌流液的送水量增加为第二送水量之后使灌流液的抽吸量增加为第二抽吸量的方式使增加灌流液的送水量和抽吸量的定时错开。由此,关节腔c1内的灌流液的量不会暂时地变少,易于继续进行手术。
[0188]
也可以是以在使灌流液的抽吸量增加为第二抽吸量之后使灌流液的送水量增加为第二送水量的方式使增加的定时错开。由此,关节腔c1内的灌流液的量不会暂时地变多,从而给予患者的负担变少。
[0189]
[浑浊应对控制的其它应用例]
[0190]
关于上述记载的浑浊应对控制,也能够将浑浊应对控制彼此组合来使用。由此,能够创造手术操作者更加不易中断的状况。
[0191]
产业上的可利用性
[0192]
如以上那样,本发明所涉及的手术系统、控制装置以及手术系统的工作方法通过探测灌流液中的浑浊来进行规定的控制,由此对于减轻给予患者、手术操作者的负担是有用的。
[0193]
附图标记说明
[0194]
1、1a~1c:手术系统;2:内窥镜装置;3:处置器具装置;6:灌流装置;21:内窥镜;22:第一控制装置;23:显示装置;31:处置器具;32:第二控制装置;33:脚踏开关;61:液体源;62:送液管;63:送水泵;64:排液瓶;65:排液管;66:抽吸泵;211:插入部;311:主体;311a:超声波振子;313:护套;c1:关节腔;j1:膝关节;p1:第一切口;p2:第二切口。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1