用于椎体成形术的骨水泥远程注入装置的制作方法
1.本发明涉及医疗设备领域,特别涉及一种用于椎体成形术的骨水泥远程注入装置。
背景技术:
2.椎体成形手术是治疗老年骨质疏松性椎体压缩性骨折的有效治疗手段,是一种通过向病变椎体内注入骨水泥来强化椎体的微创手术。该手术操作过程繁多,尤其是骨水泥注入操作,包括搅拌、装管、骨水泥状态判断、推注等步骤,术中,需要多个操作者分工合作,操作麻烦,并且骨水泥工作时间有限,手术时间较为紧张。此外,手术时,操作者必须站在手术台前通过x光观察骨水泥填充情况,多次暴露在x光的辐射下会对操作者的生命健康造成伤害。
3.为此,针对上述问题,需要研制出一款能辅助操作者避免x光照射下完成骨水泥注入操作的椎体成形术辅助装置。
技术实现要素:
4.针对传统椎体成型术手术器械操作费力、不能保护医生免受放射线伤害等问题,本发明提供一种用于椎体成形术的骨水泥远程注入装置。该装置集骨水泥搅拌、注入点调节、骨水泥推注和骨水泥硬度检测功能于一体,并提供远程控制方式,装置简单易用、功能多样,方便医生在避免x射线伤害的情况下进行椎体成形术。
5.本发明提供了一种用于椎体成形术的骨水泥远程注入装置,其包括推注平台、真空抽气组件、搅拌组件、推注组件、吸附组件、支撑组件、注入点调节组件、注入针组件、控制组件和遥控器。所述真空抽气组件、所述搅拌组件、所述推注组件和所述控制组件分别与所述推注平台的第一安装端、第二安装端、第三安装端和第四安装端连接,所述吸附组件的安装端和所述支撑组件的第一端连接,所述支撑组件的第二端和所述注入点调节组件的第一端连接,所述注入点调节组件的第二端和所述注入针组件的第一端连接,所述注入针组件的第二端和所述推注组件的输出端连接,所述搅拌组件的气体输出端和所述真空抽气组件的第一输入端连接,所述搅拌组件的骨水泥输出端和所述推注组件的输入端连接,所述吸附组件的气体输出端和所述真空抽气组件的第二输入端连接,所述遥控器通过控制组件和装置连接。所述搅拌组件,其包括棘爪、搅拌电机、第一支撑平台、搅拌器盖、搅拌腔、搅拌棒、搅拌扇面、棘齿柱、定位柱和搅拌器座,所述搅拌腔的下端和所述搅拌器座的上端固连,所述搅拌腔的上端和所述搅拌器盖的安装端固连,所述搅拌电机的输出轴通过联轴器和所述搅拌棒的第一端固接,所述搅拌棒的第二端穿过所述搅拌器盖的中心和位于所述搅拌腔内部的搅拌扇面固连。所述推注组件,其包括推注电机、齿轮、丝杆螺母、推注腔盖、活塞丝杆和推注腔,选择销穿过选择座的固定端和电机架的固定端连接,所述推注电机的输出轴和第一齿轮的中心固连,所述第一齿轮的齿端和第二齿轮的齿端啮合,所述第二齿轮的中心和所述丝杆螺母的第一安装端固连,所述丝杆螺母的中心和所述活塞丝杆的第一安装端
连接,所述丝杆螺母的第二安装端和所述推注腔盖的中部连接,所述活塞丝杆的第二安装端设有活塞,所述推注腔放置槽的一侧设有顶珠放置座,弹簧顶珠位于顶珠放置座内部。所述支撑组件,其包括伸缩外杆、压紧手柄、伸缩内杆、安装夹、垫块、移动限位块、第二支撑平台和球副座,所述伸缩外杆的球副端和所述连接板上的球副壳连接,所述伸缩内杆的第一安装端和所述第二支撑平台的第一安装端固连,所述移动限位块和所述伸缩内杆的第二安装端固连,所述安装夹的第一安装端和所述伸缩外杆的安装端固连,所述压紧手柄的第一安装端通过销钉和所述安装夹的第二端连接,所述压紧手柄的第二端和垫块的第一端连接,所述垫块的第二端和所述伸缩内杆的滑槽端连接。所述注入点调节组件,其包括安全档板、球副头、空心孔电机和周向限位销座,所述球副头的第一端和所述球副座的第二安装端连接,所述空心孔电机外壳的第一端通过电机座和所述球副头的第二端连接,所述空心孔电机外壳的第二端和所述周向限位销座的第一端固连,所述周向限位销座的第二端和周向限位销连接,滑移螺钉的第一端和蝶形螺母连接,所述滑移螺钉的第二端穿过所述安全档板和所述球副头的第三端固连。
6.可优选的是,所述真空抽气组件,其包括微型气泵、第二个二位三通阀、管路、气压传感器、消音器、过滤芯和四通管接头,所述微型气泵、所述消音器、所述气压传感器和所述第二个二位三通阀的外壳分别与所述推注平台的第一安装端固连,所述微型气泵的出气端通过第四管路和第一消音器的第一端固连,所述微型气泵的进气端通过第五管路和第二消音器的第一端固连,所述第二消音器的第二端通过第六管路和所述气压传感器的第一端固连,所述气压传感器的第二端通过第七管路和所述第二个二位三通阀的第一安装端固连,所述第二个二位三通阀的第二安装端通过第八管路和第一过滤芯的第一端固连,所述第一过滤芯的第二端通过第九管路和搅拌器盖的进气端固连,所述第二个二位三通阀的第三安装端通过第十管路和第二过滤芯的第一端固连,所述第二过滤芯的第二端通过第十一管路和所述四通管接头的第一安装端固连,所述四通管接头的第二安装端、第三安装端和第四安装端通过第一管路、第二管路和第三管路分别与吸附组件中管路固连。
7.可优选的是,在所述搅拌组件中,所述棘齿柱、所述定位柱和所述搅拌器座的下端分别与所述推注平台的第二安装端固连,所述搅拌腔下端的内部设有出口,所述搅拌电机的外壳和所述第一支撑平台的第一端固连,所述第一支撑平台的第二端和所述定位柱的上端连接,所述棘爪的第一安装端穿过所述第一支撑平台的第三端和所述棘齿柱的安装端连接,所述棘爪的第二安装端和所述扭簧连接。
8.可优选的是,在所述推注组件中,推注腔放置槽、电机架旋座、所述选择座和第一个二位三通阀的下端分别与所述推注平台的第三安装端固连,所述电机架旋座的上端和所述电机架的第一端连接,所述电机架的第二端和所述推注电机的外壳连接,所述推注腔位于所述推注腔放置槽的内部,所述推注腔的第一安装端和所述推注腔盖内部的安装端连接,所述推注腔的第二安装端通过第二软管和所述第一个二位三通阀的第一安装端固连,所述第一个二位三通阀的第二安装端通过第三软管和所述搅拌腔的出口固连,所述第一个二位三通阀的第三安装端和所述注入针组件的第一软管的第一端固连。
9.可优选的是,在所述吸附组件中,其包括吸附腔、连接板和管路,所述连接板上的吸附腔安装嘴和所述吸附腔连接,所述连接板上的管路安装嘴和所述管路连接。
10.可优选的是,在所述支撑组件中,所述伸缩内杆的第二安装端和移动限位块依次
位于所述伸缩外杆的内杆放置槽内,所述球副座的第一安装端和所述第二支撑平台的第二安装端固连,球副紧定螺钉通过球副压紧垫片和球副座的固定端连接;所述伸缩外杆、所述压紧手柄、所述垫块、所述销钉、所述移动限位块、所述安装夹和所述伸缩内杆组成脚撑,所述脚撑沿着第二支撑平台的周向均匀分布,数量为三个;所述球副压紧垫片、所述球副座、所述第二支撑平台和所述球副紧定螺钉组成球副座组件。
11.可优选的是,所述注入针组件,其包括引导管、注入管和第一软管,所述第一软管的第二端和所述注入管的第一端连接,所述注入管的第二端和所述引导管连接,所述注入管的外部设有轴向槽的螺纹丝杆。
12.可优选的是,所述微型气泵、所述第二个二位三通阀、所述第五管路、所述第四管路、所述第七管路、所述气压传感器、所述第二消音器、所述第六管路和所述第一消音器组成真空抽气总支线;所述第九管路、所述第一过滤芯和所述第八管路组成真空搅拌支线;所述第一管路、所述第二管路、所述四通管接头、所述第三管路、所述第十一管路、所述第二过滤芯和所述第十管路组成真空吸附支线。
13.可优选的是,所述棘爪、所述搅拌电机、所述第一支撑平台、所述扭簧和所述第一联轴器组成搅拌电机部件,所述第二联轴器、所述搅拌器盖、所述搅拌腔、所述搅拌棒和所述搅拌扇面组成搅拌器,所述棘齿柱、所述定位柱和所述搅拌器座组成搅拌平台支撑部件;所述搅拌电机、所述第一支撑平台、所述第一联轴器、所述第二联轴器、所述搅拌器盖、所述搅拌腔、所述搅拌棒和所述搅拌器座的轴线在同一条直线上,所述棘爪、所述棘齿柱和所述定位柱对称分布在所述搅拌器的两侧。
14.可优选的是,所述推注电机、所述第一齿轮、所述电机架、所述电机架旋座、所述选择座和所述选择销组成推注电机座旋转机构,所述第二齿轮、所述丝杆螺母、所述推注腔盖、所述推注腔放置槽、所述活塞丝杆、所述推注腔、所述弹簧顶珠、所述第二软管、所述第一个二位三通阀和所述第三软管组成推注器组件。
15.本发明与现有技术相比,具有如下优点:
16.1、本发明提供远程控制方式,医生可避开x光辐射实施骨水泥注入等操作,对预防x光职业病有一定作用。
17.2、本发明集骨水泥搅拌、骨水泥注入点调节、骨水泥推注功能于一体,功能多样,自动化程度高,减轻了医生的手术负担,为医生手术带来便利。
18.3、本发明的注入点调节模块采用真空腔吸附方式固定于病人背部,随病人移动而移动,装置固定方式新颖小巧。
19.4、本发明的注入点调节机构采用螺纹空心孔步进电机,和注入管丝杆构成丝杆螺母机构来调节注入点,结构简单紧凑,调节精度高,适合在椎体腔这种狭小空间内的微量移动要求。
20.5、本发明通过监控搅拌电机电流间接反映骨水泥硬度,方式简单有效,相较于传统手术操作者通过手感判断的方法,避免了主观因素影响。
附图说明
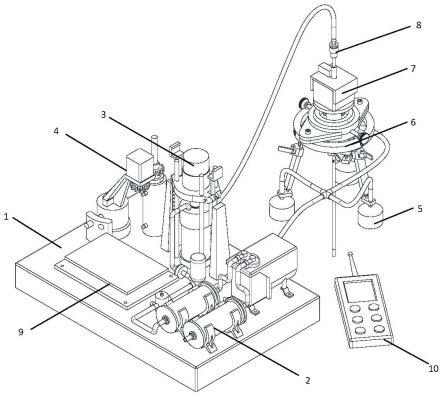
21.图1为本发明用于椎体成形术的骨水泥远程注入装置的整体结构图;
22.图2为本发明用于椎体成形术的骨水泥远程注入装置中吸附组件和支撑组件的结
构图;
23.图3为本发明用于椎体成形术的骨水泥远程注入装置中注入点调节组件和注入针组件结构图;
24.图4为本发明用于椎体成形术的骨水泥远程注入装置中搅拌组件的结构图;
25.图5为本发明用于椎体成形术的骨水泥远程注入装置中推注组件的结构图;
26.图6为本发明用于椎体成形术的骨水泥远程注入装置中真空抽气组件的结构图。
27.主要附图标记:
28.推注平台1,真空抽气组件2,真空抽气总支线21,微型气泵211,第二个二位三通阀212,第五管路213,第四管路214,第七管路215,气压传感器216,第二消音器217,第六管路218,第一消音器219,真空搅拌支线22,第九管路221,第一过滤芯222,第八管路223,真空吸附支线23,第一管路231,第二管路232,四通管接头233,第三管路234,第十一管路235,第二过滤芯236,第十管路237,搅拌组件3,搅拌电机部件31,棘爪311,搅拌电机312,第一支撑平台313,扭簧314,第一联轴器315,搅拌器32,第二联轴器321,搅拌器盖322,搅拌腔323,搅拌棒324,搅拌扇面325,搅拌平台支撑部件33,棘齿柱331,定位柱332,搅拌器座333,推注组件4,推注电机座旋转机构41,推注电机411,第一齿轮412,电机架413,电机架旋座414,选择座415,选择销416,推注器组件42,第二齿轮421,丝杆螺母422,推注腔盖423,推注腔放置槽424,活塞丝杆425,推注腔426,弹簧顶珠427,第二软管428,第一个二位三通阀429,第三软管4210,吸附组件5,吸附腔51,连接板52,管路53,支撑组件6,脚撑61,伸缩内杆611,压紧手柄612,安装夹613,垫块614,销钉615,伸缩外杆616,移动限位块617,球副座组件62,球副压紧垫片621,球副座622,第二支撑平台623,球副紧定螺钉624,注入点调节组件7,蝶形螺母71,安全档板72,滑移螺钉73,球副头74,电机座75,周向限位销76,空心孔电机77,周向限位销座78,注入针组件8,引导管81,注入管82,第一软管83,控制组件9,遥控器10。
具体实施方式
29.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
30.用于椎体成形术的骨水泥远程注入装置,如图1所示,包括推注平台1、真空抽气组件2、搅拌组件3、推注组件4、吸附组件5、支撑组件6、注入点调节组件7、注入针组件8、控制组件9和遥控器10。
31.如图1和图6所示,真空抽气组件2、搅拌组件3、推注组件4和控制组件9分别与推注平台1的第一安装端、第二安装端、第三安装端和第四安装端连接,吸附组件5的安装端和支撑组件6的第一端连接,支撑组件6的第二端和注入点调节组件7的第一端连接,注入点调节组件7的第二端和注入针组件8的第一端连接,注入针组件8的第二端和推注组件4的输出端连接,搅拌组件3的气体输出端和真空抽气组件2的第一输入端连接,搅拌组件3的骨水泥输出端和推注组件4的输入端连接,吸附组件5的气体输出端和真空抽气组件2的第二输入端连接,遥控器10通过控制组件9和装置连接。
32.真空抽气组件2,如图6所示,包括微型气泵211、第二个二位三通阀212、管路、气压传感器216、消音器、过滤芯和四通管接头233,微型气泵211、消音器、气压传感器216和第二个二位三通阀212的外壳分别与推注平台1的第一安装端固连,微型气泵211的出气端通过
第四管路214和第一消音器219的第一端固连,微型气泵211的进气端通过第五管路213和第二消音器217的第一端固连,第二消音器217的第二端通过第六管路218和气压传感器216的第一端固连,气压传感器216的第二端通过第七管路215和第二个二位三通阀212的第一安装端固连,第二个二位三通阀212的第二安装端通过第八管路223和第一过滤芯222的第一端固连,第一过滤芯222的第二端通过第九管路221和搅拌器盖322的出气端固连,第二个二位三通阀212的第三安装端通过第十管路237和第二过滤芯236的第一端固连,第二过滤芯236的第二端通过第十一管路235和四通管接头233的第一安装端固连,四通管接头233的第二安装端、第三安装端和第四安装端通过第一管路231、第二管路232和第三管路234分别与吸附组件5中管路53固连。
33.具体而言,微型气泵211、第二个二位三通阀212、第五管路213、第四管路214、第七管路215、气压传感器216、第二消音器217、第六管路218和第一消音器219组成真空抽气总支线21;第九管路221、第一过滤芯222和第八管路223组成真空搅拌支线22;第一管路231、第二管路232、四通管接头233、第三管路234、第十一管路235、第二过滤芯236和第十管路237组成真空吸附支线23。
34.搅拌组件3,如图4所示,包括棘爪311、搅拌电机312、第一支撑平台313、扭簧314、第一联轴器315、第二联轴器321、搅拌器盖322、搅拌腔323、搅拌棒324、搅拌扇面325、棘齿柱331、定位柱332和搅拌器座333;搅拌器盖322上有管路接头,四个定位柱331穿过第一支撑平台313,起到导向稳定的作用,棘爪311对称分布在第一支撑平台313的两侧,在扭簧314的作用下始终保持向外的趋势,棘齿柱331卡住棘爪311限制其向上移动,而允许其向下移动,在重力的作用下,第一支撑平台313会向下移动,直至第一联轴器315和第二联轴器321对接从而压住搅拌器32,整个机构确保了搅拌过程的稳定性,通过监视搅拌电机312的电流来测量骨水泥硬度。
35.棘齿柱331、定位柱332和搅拌器座333的下端分别与推注平台1的第二安装端固连,搅拌腔323下端的内部设有出口,搅拌腔323的下端和搅拌器座333的上端固连,搅拌腔323的上端和搅拌器盖322的安装端固连,搅拌电机312的外壳和第一支撑平台313的第一端固连,第一支撑平台313的第二端和定位柱332的上端连接,搅拌电机312的输出轴和第一联轴器315的第一端固接,搅拌棒324的第一端和第二联轴器321的第一端固接,第一联轴器315的第二端和第二联轴器321的第二端采用可拆式榫卯连接,搅拌棒324的第二端穿过搅拌器盖322的中心和位于搅拌腔323内部的搅拌扇面325固连,棘爪311的第一安装端穿过第一支撑平台313的第三端和棘齿柱331的安装端连接,棘爪311的第二安装端和扭簧314连接。
36.棘爪311、搅拌电机312、第一支撑平台313、扭簧314和第一联轴器315组成搅拌电机部件31,第二联轴器321、搅拌器盖322、搅拌腔323、搅拌棒324和搅拌扇面325组成搅拌器32,棘齿柱331、定位柱332和搅拌器333座组成搅拌平台支撑部件33;具体而言,搅拌电机312、第一支撑平台313、第一联轴器315、第二联轴器321、搅拌器盖322、搅拌腔323、搅拌棒324和搅拌器座333的轴线在同一条直线上,棘爪311、棘齿柱331和定位柱332对称分布在搅拌器32的两侧。
37.推注组件4,如图5所示,包括推注电机411、齿轮、电机架413、电机架旋座414、选择座415、选择销416、丝杆螺母422、推注腔盖423、推注腔放置槽424、活塞丝杆425、推注腔
426、弹簧顶珠427、第二软管428、第一个二位三通阀429和第三软管4210;推注腔盖423上有丝杆螺母放置孔,放置孔孔壁设上有小凸起,丝杆螺母422上有凹槽环,推注腔盖423上的放置孔上的小凸起嵌在丝杆螺母422上的凹槽环内,限制丝杆螺母422只做周向运动,活塞丝杆425头部为活塞,尾部为带有轴向槽的螺纹柱。
38.电机架413有工作态和脱离态两个位置,在脱离态,选择销416插入在选择座415上的脱离孔位,第一齿轮412和第一齿轮421分离,此时推注器组件42可方便安装或取出;在工作态,选择销416插入在选择座415上的工作孔位,第一齿轮412和第一齿轮421相啮合;丝杆螺母422和活塞丝杆425构成丝杆螺母机构,将丝杆螺母422的旋转运动转化活塞的推拉运动,从而实现骨水泥的推注和吸入。
39.推注腔放置槽424、电机架旋座414、选择座415和第一个二位三通阀429的下端分别与推注平台1的第三安装端固连,电机架旋座414上装有轴承,电机架旋座414的轴承外圈通过过盈配合和电机架413的第一端连接,电机架413的第二端和推注电机411的外壳连接,选择销416穿过选择座415的固定端和电机架413的固定端连接,电机架413在选择销416的固定下保持不动。
40.推注电机411的输出轴和第一齿轮412的中心固连,第一齿轮412的齿端和第二齿轮421的齿端啮合,第二齿轮421的中心和丝杆螺母422的第一安装端固连,丝杆螺母422的中心和活塞丝杆425的第一安装端连接,丝杆螺母422的第二安装端和推注腔盖423的中部连接,活塞丝杆425的第二安装端设有活塞,推注腔放置槽424的一侧设有两个顶珠放置座,弹簧顶珠427位于顶珠放置座内部,推注腔426位于推注腔放置槽424的内部,推注腔426的第一安装端通过卡扣和推注腔盖423内部的安装端连接,推注腔426的第二安装端通过第二软管428和第一个二位三通阀429的第一安装端固连,第一个二位三通阀429的第二安装端通过第三软管4210和搅拌腔323的出口固连,第一个二位三通阀429的第三安装端和注入针组件8的第一软管83的第一端固连。
41.优选地,推注电机411、第一齿轮412、电机架413、电机架旋座414、选择座415和选择销416组成推注电机座旋转机构41,第二齿轮421、丝杆螺母422、推注腔盖423、推注腔放置槽424、活塞丝杆425、推注腔426、弹簧顶珠427、第二软管428、第一个二位三通阀429和第三软管4210组成推注器组件42。
42.吸附组件5,如图2所示,包括吸附腔51、连接板52和管路53,连接板52上的吸附腔安装嘴和吸附腔51连接,连接板52上的管路安装嘴和管路53连接,管路安装嘴和吸附腔安装嘴贯通,管路53和吸附腔51相互贯通。
43.支撑组件6,如图2所示,包括伸缩内杆611、压紧手柄612,安装夹613,垫块614,销钉615,伸缩外杆616,移动限位块617、第二支撑平台623、球副座622、球副压紧垫片621和球副紧定螺钉624,伸缩外杆616上设有滑移隧道限制伸缩内杆611只做移动,压紧手柄612在锁死状态通过按压垫块614于伸缩内杆611的长槽内,通过摩擦力限制伸缩内杆611的滑移,从而固定脚撑61的高度。
44.伸缩外杆616的球副端和连接板52上的球副壳连接,伸缩内杆611的第二安装端和移动限位块617依次位于伸缩外杆616的内杆放置槽内,伸缩内杆611的第一安装端和第二支撑平台623的第一安装端固连,移动限位块617和伸缩内杆611的第二安装端固连,安装夹613的第一安装端和伸缩外杆616的安装端固连,压紧手柄612的第一安装端通过销钉615和
安装夹613的第二端连接,压紧手柄612的第二端和垫块614的第一端连接,垫块614的第二端和伸缩内杆611的滑槽端连接,球副座622的第一安装端和第二支撑平台623的第二安装端固连,球副紧定螺钉624通过球副压紧垫片621和球副座622的固定端连接。
45.伸缩内杆611、压紧手柄612、安装夹613、垫块614、销钉615、伸缩外杆616和移动限位块617组成脚撑61,脚撑61沿着第二支撑平台623的周向均匀分布,数量为三个,可自由伸缩的脚撑61和以球副连接的可灵活调节姿态的真空腔能使注入点调节组件7很好地放置在人体背部,确保固定效果。球副压紧垫片621、球副座622、第二支撑平台623和球副紧定螺钉624组成支撑组件62。
46.注入点调节组件7,如图3所示,包括蝶形螺母71、安全档板72、滑移螺钉73、球副头74、电机座75、周向限位销76、空心孔电机77和周向限位销座78,空心孔电机77的旋转轴是空心且带螺纹。
47.球副头74的第一端和球副座622的第二安装端连接,空心孔电机77外壳的第一端通过电机座75和球副头74的第二端连接,空心孔电机77外壳的第二端和周向限位销座78的第一端固连,周向限位销座78的第二端通过过盈配合和周向限位销76连接,滑移螺钉73的第一端和蝶形螺母71连接,蝶形螺母71通过螺纹安装在滑移螺钉73上以限制安全档板72的位置,滑移螺钉73的第二端穿过安全档板72和球副头74的第三端固连。
48.注入针组件8,其包括引导管81、注入管82和第一软管83,第一软管83的第二端通过粘贴剂和注入管82的第一端连接,注入管82的第二端和引导管82连接,注入管82的外部设有轴向槽的螺纹丝杆;引导管81插入用户椎体为注入管82开辟通道,注入管82上印有指示注入管82底部露出引导管81底部长度的刻度,第一软管83两端连接有鲁尔接头。
49.注入管82上的螺纹丝杆和空心孔电机77的空心孔构成丝杆螺母机构,以此实现注入管82的上下移动甚至安装或取出,周向限位销76嵌在注入管81上的螺纹丝杆的轴向槽内,防止注入针被空心孔电机77带着旋转,整个传动机构简单紧凑,最大限度地减轻了注入点调节组件7的质量。注入管82上的螺纹丝杆底部和刻度起始线的距离固定,通过调节蝶形螺母71改变安全挡板72的位置,注入管82一直向下深入,最后其螺纹丝杆会顶到安全挡板72,此即注入管82的最大探入深度,安全挡板72限制了注入管82的最大探入深度,起到了硬件保护作用。
50.以下结合实施例对本发明一种用于椎体成形术的骨水泥远程注入装置做进一步描述:
51.首先将骨水泥粉剂和液剂倒入搅拌器32内装瓶,转动扭簧314使位于两侧的棘爪311的拨片张开,此时棘齿柱331不再卡住棘爪311,将搅拌电机组件31上提,将搅拌器32放在搅拌器座333内并固定,放好搅拌器32后,将提出的搅拌电机组件31的输出轴依次与第一联轴器315和第二联轴器321对接,准备搅拌位于搅拌器32内的骨水泥。
52.将第二个二位三通阀212设置为第一位置,将搅拌器32的搅拌腔323和微型气泵211导通,启动微型气泵211和搅拌电机312,实施负压真空搅拌骨水泥。
53.待骨水泥搅拌完成后,将推注器组件42放置于推注腔放置槽424内固定好,将电机架413旋置为工作态,用选择销416固定,并将第一个二位三通阀429设置为第一位置,依次通过第二软管428和第三软管4210将搅拌腔323和推注腔426导通,实施骨水泥的吸入。
54.在骨水泥吸入一定量后,将第一个二位三通阀429设置为第二位置,推注腔426和
注入针组件8的注入管82导通,准备实施骨水泥推注。此时搅拌器32内还存有部分的骨水泥,搅拌电机312通过搅拌棒324带动搅拌扇面325继续匀速搅拌,控制组件9监控搅拌电机312的电流,间接测量骨水泥硬度。
55.然后根据引导管81露出皮肤表面的长度,调节支撑组件7上脚撑61的高度并固定,并将第二个二位三通阀212设置为为第二位置,吸附腔51和微型气泵211导通,实施负压真空吸附。
56.通过控制组件9的监控,待骨水泥硬度合适,位于推注腔426内部的活塞开始动作,往注入管82装填骨水泥,骨水泥装填完后,将注入管82安装在注入点调节组件7上。
57.最后待骨水泥的硬度达到相关要求后,操作者手持遥控器10在避开x光照射的地方,配合x光影像远程控制装置实施椎体成形术,能够同时完成调节注入点的深度和推注骨水泥。
58.以上的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1