一种斜视手术辅助装置
1.本发明涉及眼科手术器械领域,具体为一种斜视手术辅助装置。
背景技术:
2.斜视是指眼外肌协调运动失常导致双眼不能同时注视同一物体,由先天或后天的因素导致。眼外肌是附着于眼球外部的肌肉,眼球维持正常眼位运动是通过所有眼外肌共同协调完成,各主动肌、拮抗肌、配偶肌在左额叶眼球运动中枢支配下默契、协调地工作,眼外肌保持自身的紧张力、来自小脑及其他平衡器官的兴奋性。临床上任何原因导致的功能性眼外肌肌力不平衡,或由于中枢神经、外周神经、眼外肌肌肉或肌肉接头异常导致眼外肌器质性病变,均可引起一条或多条眼外肌麻痹不能协调运动、不能够保持正常眼位,均可造成双眼单视功能异常。
3.正常情况下双眼运动协调一致,双眼可同时注视同一目标 ,并使目标在双眼黄斑部成像,传导到大脑视觉中枢,重叠成一个完整且有立体感觉的单一物像,而斜视患者由于两眼不能同时注视目标,视轴呈分离状态,其中一眼注视目标,另一眼偏离目标,常伴随有复视、眩晕、视疲劳等症状,还可能伴有屈光不正和弱视症状,此外,部分斜视患者可能出现代偿头位(为避免产生复视或者视物模糊而调整的头位),造成颈部歪斜或头部位置不正,影响美观。
4.斜视矫正手术可用于各种斜视,特别是斜视角易变化的内斜视、较复杂的垂直性斜视、以及各种眼外肌综合征,在斜视手术中,需要用两个斜视钩往相反方向勾住眼外肌,使眼外肌充分暴露,并使得肌肉保持一定的张力,以方便进一步手术,而斜视钩的操作一般需要助手进行,通过助手的手力维持斜视钩的位置和角度,保持斜视钩的稳定,施术者无法单独完成手术,助手的存在会对施术者的操作造成阻碍。因此,如何在无需助手参与的情况下对斜视钩进行固定,以使得施术者可以单独完成斜视手术成为眼科手术器械领域亟待解决的问题。
技术实现要素:
5.本发明的目的是针对上述背景技术中存在的问题,提供一种斜视手术辅助装置,该装置可以在患者需做手术的眼睛上方位置提供操作平台,通过操作平台上的斜视钩勾住并固定眼外肌,可根据实际情况调整勾住眼外肌的位置和角度,无需助手的参与,为施术者提供较为自由的手术操作空间,解决了施术者无法单独完成手术、助手对施术者造成阻碍的问题。
6.为了实现上述发明目的,本发明采用了以下技术方案:一种斜视手术辅助装置,包括用于对头部进行定位的底座和用于定位至患眼位置的手术操作平台,所述手术操作平台通过支架连接所述底座,手术操作平台包括有环形座和至少两个斜视钩组件,所述环形座内部形成用于提供手术操作空间的圆形空腔;所述底座上设有用于限定头部枕在特定位置的头枕限位件,当患者以脸朝正上方的方式枕在头枕
限位件上时,所述环形座的圆形空腔位于患眼的正上方;所述斜视钩组件包括斜视钩、控制杆和与所述环形座滑动连接的可调滑座,所述控制杆用于控制斜视钩勾住眼外肌以环形座的径向方向运动,所述可调滑座可沿着环形座做周向运动,可调滑座与环形座之间还设有用于将可调滑座固定在环形座某一位置的紧固机构。
7.与现有技术相比,采用了上述技术方案的斜视手术辅助装置具有如下有益效果:一、环形座可以为施术者提供较为宽敞的操作空间,通过定位调整功能可以将环形座调至患者需手术的眼睛上方,使得眼睛处于环形座的圆形空腔中间位置,设于环形座上的斜视钩可以勾住眼外肌并固定,无需助手参与,减少了对施术者手术操作的妨碍,方便施术者独自完成手术。
8.二、斜视钩可以沿着环形座做周向运动,可以在360
°
范围内使斜视钩拉向任意位置,使用更加灵活,眼外肌的拉扯角度更易调节,适用于各种不同病况的患者。
9.三、通过控制杆可以方便地切换斜视钩的活动和固定状态,勾住眼外肌并调整目标状态后,通过操作控制杆将斜视钩固定在现位置,且在手术进行过程中,施术者可以随时通过控制杆来调整眼外肌的位置和拉伸状态,利于手术的顺利进行。优选的,控制杆与可调滑座之间设有弹性复位件,控制杆还设有可手动控制的锁定机构,在外拉控制杆时可通过锁定机构使斜视钩锁定在特定位置,弹性复位件为斜视钩提供向环形座内侧运动的力,调节斜视钩时,只需要手动施加力度向外拉扯控制杆,便可以控制眼外肌的拉出程度,并通过锁定机构将斜视钩固定在特定位置,手术结束后释放锁定机构并可使斜视钩复位至原始位置,便于斜视钩的取下。
10.优选的,锁定机构包括至少一个锯齿杆和控制钮,所述锯齿杆边缘密集排布有朝向环形座圆心方向倾斜的锯齿,可调滑座内部设有可嵌入锯齿杆边缘的齿槽中的卡块,锯齿杆活动连接在控制杆内部,锯齿杆与控制钮之间通过连动结构相连接,控制杆侧壁设有孔槽,锯齿杆在自然状态下由所述孔槽向外伸出,控制钮可控制锯齿杆完全内收至所述孔槽内部,通过锯齿杆可以梯度地控制斜视钩拉出的程度(即斜视钩可以一级一级地被拉出),便于精确控制眼外肌被拉紧的程度,避免因手力控制不当导致眼外肌拉紧过度,造成不必要的二次伤害。
11.优选的,锯齿杆的数量为三个,三个锯齿杆环绕控制杆周向等角度排列,锯齿杆的一端部通过弹性转轴与控制杆内部活动连接;所述连动结构包括主动连杆和三个被动连杆,所述主动连杆一端与控制钮连接,主动连杆另一端与三个被动连杆旋转连接,被动连杆远离主动连杆的一端与锯齿杆旋转连接,三个锯齿杆同步活动,锁定时三个锯齿杆边缘的锯齿被卡住,使得斜视钩的固定更加稳定,有效避免斜视钩滑动、偏转。
12.优选的,支架设有用于调节手术操作平台高度的升降机构。
13.优选的,底座上设有水平滑杆,支架底端设有滑座,支架通过所述滑座与水平滑杆滑动连接,滑座上还设有锁死机构。
14.通过上述的升降机构和水平滑动功能,使得手术操作平台可以在自由地在竖直和水平方向上进行调节,可以进一步提高该装置的使用灵活性、通用性和精确性。
15.优选的,环形座内侧壁、下表面或内侧壁与下表面的连接处设有一周照明灯带,周向设置的照明灯带可以在环形座内部空间中达到类似无影灯的效果,使得手术视野更加清晰,减少施术者以及手术器械本身产生的阴影。
附图说明
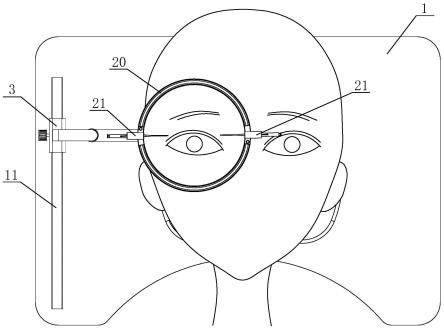
16.图1为本发明斜视手术辅助装置实施例结构示意图。
17.图2为本实施例中手术操作平台的结构示意图(上方视角)。
18.图3为本实施例中手术操作平台的结构示意图(下方视角)。
19.图4为本实施例中斜视钩组件的剖面示意图。
20.图5为本实施例中锯齿杆的分布方式示意图。
21.图6为本实施例的使用方式示意图。
22.附图标记:1、底座;10、头枕限位件;11、水平滑杆;2、手术操作平台;20、环形座;200、圆形空腔;21、斜视钩组件;210、斜视钩;211、控制杆;212、可调滑座;2120、卡块;213、锯齿杆;214、控制钮;215、连动结构;2150、主动连杆;2151、被动连杆;216、弹性复位件;22、照明灯带;3、支架;30、升降机构;31、滑座;310、锁死机构。
具体实施方式
23.下面结合附图对本发明做进一步描述。
24.如图1至图6所示的斜视手术辅助装置,包括用于对头部进行定位的底座1和用于定位至患眼位置的手术操作平台2,手术操作平台2通过支架3连接底座1,手术操作平台2包括有环形座20和两个斜视钩210组件21,两个斜视钩210组件21可滑动地设置在环形座20上。
25.底座1上设有用于限定头部枕在特定位置的头枕限位件10,头枕限位件10中部留有凹陷部,当患者以脸朝正上方的方式枕在头枕限位件10上时,患者的枕骨部位嵌入于头枕限位件10的凹陷部中。
26.支架3设有用于调节手术操作平台2高度的升降机构30,底座1上设有水平滑杆11,支架3底端设有滑座31,支架3通过滑座31与水平滑杆11滑动连接,滑座31上还设有锁死机构310,通过控制升降机构30和控制支架3水平滑动,以在竖直和水平方向上调节手术操作平台2,使得环形座20的圆形空腔200正位于患眼的正上方,此位置是斜视钩210勾住眼外肌的适宜位置,且便于施术者的操作。
27.环形座20内部形成用于提供手术操作空间的圆形空腔200,环形座20内侧壁与下表面的连接处设有一周照明灯带22,该照明灯带22可以在环形座20内部空间中达到类似无影灯的效果,使得手术视野更加清晰,减少施术者以及手术器械本身产生的阴影。
28.斜视钩210组件21包括斜视钩210、控制杆211和与环形座20滑动连接的可调滑座212,控制杆211用于控制斜视钩210勾住眼外肌以环形座20的径向方向运动,当眼外肌被拉至目标状态后,控制杆211可以以此时的位置和角度固定。
29.可调滑座212可沿着环形座20做周向运动,可以在360
°
范围内使斜视钩210拉向任意位置,眼外肌的拉扯角度可以根据实际需要调节,适用于各种不同病况的患者,可调滑座212与环形座20之间还设有用于将可调滑座212固定在环形座20某一位置的紧固机构。
30.如图4和图5所示,控制杆211与可调滑座212之间设有弹性复位件216,控制杆211还设有可手动控制的锁定机构,在外拉控制杆211时可通过锁定机构使斜视钩210锁定在特定位置,锁定机构包括锯齿杆213和控制钮214,控制钮214设于控制杆211的尾端。
31.锯齿杆213的数量为三个,三个锯齿杆213环绕控制杆211周向等角度排列,锯齿杆
213边缘密集排布有朝向环形座20圆心方向倾斜的锯齿,可调滑座212内部设有可嵌入锯齿杆213边缘的齿槽中的卡块2120,锯齿杆213活动连接在控制杆211内部,锯齿杆213与控制钮214之间通过连动结构215相连接,控制杆211侧壁设有孔槽,锯齿杆213在自然状态下由孔槽向外伸出。
32.锯齿杆213的远离斜视钩210的一端部通过弹性转轴与控制杆211内部活动连接,连动结构215包括主动连杆2150和三个被动连杆2151,主动连杆2150一端与控制钮214连接,主动连杆2150另一端与三个被动连杆2151旋转连接,被动连杆2151远离主动连杆2150的一端与锯齿杆213旋转连接。自然状态下,由于弹性转轴的作用,三个锯齿杆213均由孔槽向外伸出,此时卡块2120可陷入至锯齿杆213的齿槽中,按压控制钮214可以控制锯齿杆213完全内收至孔槽内,此时锯齿杆213完全脱离卡块2120。
33.弹性复位件216为斜视钩210提供向环形座20内侧运动的力,调节斜视钩210时,只需要手动施加力度向外拉扯控制杆211,便可以控制眼外肌的拉出程度,并通过锁定机构将斜视钩210固定在特定位置,手术结束后释放锁定机构并可使斜视钩210复位至原始位置,便于斜视钩210的取下。
34.以上所述是本发明的优选实施方式,对于本领域的普通技术人员来说不脱离本发明原理的前提下,还可以做出若干变型和改进,这些也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1