一种质子加速器治疗系统的制作方法
1.本发明涉及一种质子加速器治疗系统。
背景技术:
2.质子加速器治疗就是一种利用电磁加速的原理对质子进行加速,最终通过轰击重金属靶发生韧性辐射,以此为临床上放射治疗提供符合要求的x或e线辐射束,而x或e线对肿瘤细胞具有破坏及增殖抑制的作用,所以“放疗”就是以此达到治疗目的。
3.目前,质子加速器治疗系统一般包括支架、束流引导系统、束流配送系统、束流引导定位系统等,快速运动的质子通过轰击重金属靶发生韧性辐射,产生临床上放射治疗符合要求的x或e线辐射束,经束流引导系统、束流配送系统、束流引导定位系统,配合支架中的治疗床,将射束照射到躲在治疗床上的患者的病灶(肿瘤),实现对患者放疗。
4.但是,目前的束流引导系统中,只使用一组两个磁极相对面为竖直面的二级磁铁,它对射束的引导不能满足治疗的需要。
技术实现要素:
5.本发明的目的是为克服目前质子加速器治疗系统中束流引导系统中,只使用一组两个磁极相对面为竖直面的二级磁铁,它对射束的引导不能满足治疗的需要的不足,提供一种质子加速器治疗系统,其束流引导系统中具有两组二级磁铁。
6.本发明为实现其技术目的所采用的技术方案是:一种质子加速器治疗系统,包括:支架、束流引导系统、束流配送系统、束流引导定位系统;支架包括相对设置的两块前端加工有半圆形开孔的矩形立板;所述的束流引导系统夹在两块矩形立板中间,包括束流依次经过的二级磁铁a、二级磁铁b、偏转磁铁;
7.所述二级磁铁a的磁轭a固定夹在两块矩形立板之间,两个磁极a为在射束传播方向的竖向的矩形磁极;
8.所述的二级磁铁b可沿竖直方向上下滑动,包括两个磁极b,所述的磁极b为在射束传播方向的竖向的矩形磁极;
9.所述的偏转磁铁包括一对上下对称结构的上、下偏转磁铁,上、下偏转磁铁相对于射束传播方向的水平面镜像对称,上、下偏转磁铁各自的两个偏转磁极相对的表面与射束传播方向的竖向平面平行,上、下偏转磁铁的偏转磁轭的侧壁分别与两个矩形立板的内表面连接。
10.进一步的,上述的质子加速器治疗系统中:带动所述的二级磁铁b沿竖直方向上下滑动的是直线机构a,所述的直线机构a包括两块竖向矩形立板,两块竖向矩形立板夹着固定二级磁铁b的磁轭b;每块分别通过滑块a与竖向设置在所述的矩形立板内表面的直线导轨a滑动连接,还包括驱动滑块a在直线导轨a滑动直线驱动机构a。
11.进一步的,上述的质子加速器治疗系统中:所述的直线驱动机构a为丝杆螺母式结构。
12.进一步的,上述的质子加速器治疗系统中:所述的束流配送系统具有一个梯形框架内,所述的梯形框架挂在一个摆动机构内;
13.所述的摆动机构包括一对分别镶嵌在所述的两个矩形立板的半圆形开孔内的环形导轨座,安装在环形导轨座内的弧形导轨,设置在所述的两个弧形导轨上的滑块;所述的滑块分别与梯形框架上端u形结构两个支臂的外表面连接,实现设置在束流配送系统的梯形框架在弧形导轨内摆动。
14.进一步的,上述的质子加速器治疗系统中:所述环形导轨座的内弧面加工有弧形齿条,两个弧形齿条分别与一个齿轮活动连接,所述的齿轮分别与安装在所述的梯形框架上端u形结构横板下表面中部的旋转机构活动连接;所述的旋转机构与一个安装在u形结构横板下表面后端的带轮式联动机构活动连接。
15.进一步的,上述的质子加速器治疗系统中:所述的支架中包括治疗床,所述的治疗床包括床面、旋转机构a、摆臂a、旋转机构b、摆臂b、旋转机构c、上升机构b、底座;
16.所述的底座固定安装在水平面上;所述的上升机构b设置在底座上,其顶端设置轴心线垂直于水平面的旋转机构c;
17.所述的旋转机构c的旋转端连接所述的摆臂b,所述的摆臂b的末端设置所述的旋转机构b,所述的旋转机构b的轴心线与水平面垂直;
18.所述的旋转机构b的旋转端连接所述的摆臂a;所述的摆臂a的末端设置所述的旋转机构a,所述的旋转机构a的轴心线与水平面垂直;
19.所述的床面安装在所述的旋转机构a的旋转端。
20.进一步的,上述的质子加速器治疗系统中:所述的床面包括床板,所述床板长边约三分之一处的上表面嵌入一个两个边与床板长边平行的矩形板a,所述矩形板a的上表面与床板的上表面齐平,床板的下表面与矩形板b连接,矩形板a和矩形板b床板在床板对称设置。
21.进一步的,上述的质子加速器治疗系统中:所述的旋转机构a包括一个与水平面垂直的顶上带有法兰的转轴a;
22.所述的转轴a法兰的上表面与床面连接;
23.转轴a上间隔的两个轴承a;
24.带动转轴a旋转的电机a;
25.在所述的摆臂a末端设置有圆形通孔形成安装转轴a的安装座a,转轴a上的轴承a外圆与安装座a固定,电机a通过环形压板固定安装在摆臂a的圆形通孔中,电机a的轴与转轴a连接。
26.进一步的,上述的质子加速器治疗系统中:所述的旋转机构c包括与圆板a,所述的圆板a的上表面与摆臂b端部的圆形底面连接,圆板a的下表面与轴心线与水平面垂直的回旋轴的内环连接,回旋轴的外环与圆板b连接,圆板b的上表面与电机c连接,电机c置于回旋轴的内环之中并与圆板a活动连接。
27.进一步的,上述的质子加速器治疗系统中:所述的上升机构b包含垂直的四方形立柱,四方形立柱的上表面通过圆板b与所述的旋转机构c的圆板b表面相连,支撑所述的旋转机构c;
28.四方形立柱的四个侧壁分别与垂直方向的直线导轨b连接,四个直线导轨b分别与
2-1、磁极b、3-2-1、磁轭b、3-3、直线机构a、3-3-1、竖向矩形立板、3-3-2、滑块a、3-3-3、直线导轨a、3-3-4、驱动机构a、3-4、偏转磁铁、3-4-1、偏转磁极、3-4-2、偏转磁轭;
61.301、射束a段,302、射束b段、303、射束c段、304、射束d段、305、射束e段、306、射束f段、307、射束g段、308、参考点;
62.4、摆动机构、4-1、环形导轨座、4-2、弧形导轨、4-3、配送滑块、4-4、配送齿轮、4-5、旋转机构、4-6、带轮式联动机构;
63.5、梯形框架;
64.6、环形影像引导定位系统安装框架
65.7、治疗床、7-1、床面、7-1-1、床板、7-1-2、矩形板a、7-1-3、矩形板b、7-2、旋转机构a、7-2-1、转轴a、7-2-2、轴承a、7-2-3、安装座a、7-2-4、环形压板a、7-2-5、电机a、7-3、摆臂a、7-4、旋转机构b、7-4-1、转轴b、7-4-2、轴承b、7-4-3、安装座b、7-4-4、环形压板b,7-4-5、电机b、7-5、摆臂b、7-6、旋转机构c、7-6-1、圆板a、7-6-2、回旋轴、7-6-3、圆板b、7-6-4、电机c、7-7、上升机构b、7-7-1、四方形立柱、7-7-2、直线导轨b、7-7-3、滑块b、7-7-4、三角形支架、7-7-5、直线驱动机构b、7-8、底座。
具体实施方式
66.在以下的描述中使用一个xyz坐标系统,该坐标系统以治疗等中心101为原点,以z轴为垂直轴的直角坐标系,xy平面是水平面、yz平面是观察者视线的垂直面,xz平面是观察者视线的平行面。另外后缀a、b、c等只是表示部件与其它的区别,并不能对该部件进行限制。
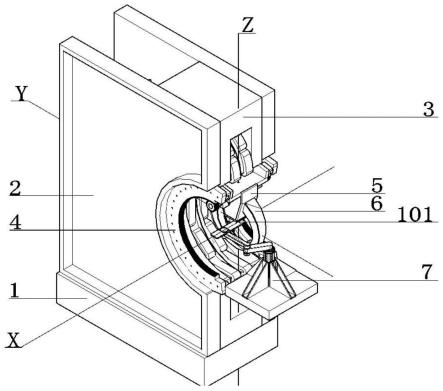
67.实施例1,本实施例是如图1所示,本实施例的一种质子加速器治疗系统包括一个矩形基座1,在一个以x轴y轴z轴原点为治疗等中心101以z轴为垂直轴的直角坐标系中,其表面与xy平面平行并处于xy平面的下方,其长边与y轴平行,在其上表面连接两个一端加工有以x轴为圆心的半圆形开孔的矩形立板2,以两个矩形立板2为支架主体,在其内表面yz平面平行,并相对于yz平面处于镜像对称的位置上,定义以xz平面为基准,矩形基座1和矩形立板2所在方向为y轴的负方向,在两个矩形立板2之间安装一个束流导引系统3,在矩形立板2前端的半圆形开孔中安装一个束流配送系统摆动机构4,摆动机构4连接一个上端为u形结构两个立面与x轴垂直两个斜面与x轴平行上宽下窄的梯形束流配送系统安装梯形框架5,梯形框架5的与x轴平行的两个斜面与一个内环圆心与x轴重合的环形影像引导定位系统安装框架6连接,在环形影像引导定位系统安装框架6沿y轴正方向的侧旁安装一个治疗床7。
68.如图2所示,本实施例中,束流导引系统3包括沿y轴正方向相对于等中心101由远及近依次排列的一个二级磁铁a3-1、一个沿z轴方向可移动的二级磁铁b3-2、一个带动二级磁铁b3-2上下移动的z轴方向直线机构a3-3和一个偏转磁铁3-4。
69.如图3所示,二级磁铁a3-1其从y轴方向看的几何中心与y轴重合,其两个磁极a3-1-1为矩形,相对的表面与yz平面平行,并相对于yz平面镜像对称,其磁轭a3-1-2与x轴垂直的两个侧壁分别与两个矩形立板2的内表面连接。图中,为看到两个磁极a3-1-1,将励磁线圈从磁轭a3-1-2中移出,画在其右边。
70.如图4所示,二级磁铁b3-2的两个磁极b3-2-1为矩形,其相对的表面与yz平面平
行,并相对于yz平面镜像对称,其前后端面与xz平面平行。图中,为看到两个磁极b3-2-1,将励磁线圈从磁轭b3-2-2中移出,画在其右边。
71.如图5所示,二级磁铁b3-2的磁轭b3-2-2与x轴垂直的两个侧壁与沿z轴方向直线机构a3-3活动相连,所述的直线机构a3-3包括两个表面与x轴垂直的竖向矩形立板3-3-1,两个竖向矩形立板3-3-1的内表面分别与磁轭b3-2-2与x轴垂直的两个侧壁连接,每个竖向矩形立板3-3-1的外表面与两组每组两个滑块a3-3-2连接,两组每组两个滑块a3-3-2分别与两根z轴方向的直线导轨a3-3-3活动连接,两根直线导轨a3-3-3与同侧的矩形立板2的内表面连接,两个竖向矩形立板3-3-1同时与一个z轴方向的直线驱动机构a3-3-4连接,直线驱动机构a3-3-4分别与两个矩形立板2的内表面连接。
72.本实施例中,直线驱动机构a3-3-4为丝杆螺母式结构,其中的四个螺母两个一组分别与两个竖向矩形立板3-3-1连接,四个丝杆通过一个带轮机构实现相互活动连接,驱动一个丝杆,可驱动二级磁铁b3-2上下移动。鉴于直线驱动机构a3-3-4有多种样式可以选择,在其它例中也可以采用其它方式。
73.如图6所示,偏转磁铁3-4为上下对称结构,并相对于xy平面镜像对称,上下偏转磁铁3-4各自的两个偏转磁极3-4-1相对的表面与yz平面平行,且相对于yz平面镜像对称,上下偏转磁铁3-4的偏转磁轭3-4-2的与x轴垂直的侧壁分别与两个矩形立板2的内表面连接。
74.为看清上方的两个偏转磁极3-4-1,图6中将上方左侧的励磁线圈向左移动了一个距离,将上方的偏转磁轭3-4-2向后移动了一个距离。
75.鉴于偏转磁极3-4-1背侧的线圈绕柱形状有多种选择,在其它实施例中可以选择不同的偏转磁铁3-4。
76.如图7所示,从x轴方向看,两对同形偏转磁极3-4-1中上方两个偏转磁极3-4-1的朝向y轴正方一侧的边缘为以等中心101为圆心的圆弧形状,朝向y轴负方一侧的边缘为不规则曲线形状,上侧边缘为圆弧形状。
77.下面对本实施例的束流引导系统的原理进行说明。
78.如图8所示,束流导引系统3导引的射束可分为7段,分别是,将要射入磁极a3-1-1的射束a段301、经磁极a3-1-1偏转的射束b段302、从磁极a3-1-1射出的射束c段303、经磁极b3-2-1偏转的射束d段304、从磁极b3-2-1射出的射束e段305、经偏转磁极3-4-1偏转的射束f段306和从偏转磁极3-4-1射出的射束g段307。
79.从磁极a3-1-1射出的射束c段303在射入偏转磁极3-4-1之前做了一次修正,如不经这次修正,从偏转磁极3-4-1射出的射束g段307便不能相较于等中心101。这是由偏转磁极3-4-1的制作规则决定的。
80.图9演示的是从磁极a3-1-1射出的射束c段303不经磁极b3-2-1的偏转直接射入偏转磁极3-4-1并经偏转后射出的情况。图中,偏转磁极3-4-1的背侧标有若干参考点308,所谓参考点是指,射束c段303如在参考点308位置处射入偏转磁极3-4-1中,则射束可安射束f段306的路径偏转,按射束g段307的路径射出,最后交于等中心101。但实施例中没有完全按参考点308规划偏转磁极3-4-1背侧的边缘,出于以下三点考虑:
81.1)如图10所示,如按参考点308规划0
°
射束g段107偏转时的偏转磁极3-4-1背侧边缘,那么偏转磁极3-4-1背侧的边缘将相交于偏转磁极3-4-1内侧边缘与y轴的连接点,这样的锐形磁极的磁场强度会发生畸变,不易调控,故将这一段的偏转磁极3-4-1背侧边缘改为
连接20
°
参考点308和10
°
参考点308并延长的直线。这是对参考点308的修正。
82.这里图10是图9的局部放大图,图中所标度数是射束g段307相对于y轴负方向的角度。
83.2)如图11所示,从射束g段307偏转70
°
开始,逐步增加了射束f段306的偏转半径。偏转半径的增加意味着偏转磁铁3-4两个相对偏转磁极3-4-1间磁场强度的降低。如不增加射束f段306的偏转半径,超过70
°
射束f段307的参考点308将落在70
°
参考点308后侧(图中的右侧),这样就无法实现超过70
°
的射束g段307。这里图11是图9的局部放大图。
84.增加射束f段306的偏转半径后,在70
°
以上如仍按参考点308规划偏转磁极3-4-1背侧的边缘形状,边缘曲线将出现凸凹变化,这也不利于磁场强度的调控,故将射束g段307偏转60
°
的参考点308和偏转90
°
的参考点308连成直线。这又是对参考点308的修正。
85.按1)和2)规则修正的偏转磁极3-4-1背侧的边缘形状不能保证从偏转磁极3-4-1射出的射束g段307与等中心101相交。
86.3)偏转磁极3-4-1背侧的边缘形状即使是连接射束g段307偏转20
°
的参考点308和偏转60
°
的参考点308的曲线形状,也不能完全保证射束g段307与等中心相交。因为偏转磁极3-4-1的磁极面很大,且其背侧励磁线圈的绕柱采用的是不规则设计,很难保证偏转磁极3-4-1间的磁场强度处处相等。如果磁场强度能做到处处相等,则偏转射束f段306就是标准的圆弧,如不能做到处处相等,偏转射线f段306就是不规则的弧线,因而不能保证从偏转磁极3-4-1射出的射束g段307与等中心101相交。
87.为在偏转磁极3-4-1的背侧边缘相对于参考点308做出修正和在不能完全保证偏转磁极3-4-1间磁场强度绝对均匀的情况下,仍保证射束g段307能与等中心101相交,有两种方法,一是对射束c段303的方向做出修正;二是对射束g段307的方向做出修正,本实施例采用对射束c段303进行修正的方法。这就是设置二级磁极b3-2的原由,也称二级磁极b3-2为修正磁铁。
88.二级磁铁b(3-2)的作用是如何发挥作用的:
89.1)射束c段303的生成
90.如图12所示,假设二级磁铁a3-1两个磁极a3-1-1之间的磁场强度是均匀的,则经磁极a3-1-1偏转的射束b段302是半径不同的弧线,每个从磁极a3-1-1射出的射束c段303与对应的弧形射束b段302相切相连。随着磁铁a3-1磁场强度连续变化,从磁极a3-1-1射出的射束c段303与y轴的夹角也是连续变化的。
91.2)倒推的射束e段305
92.如图13所示,依据治疗需要,先确定由等中心倒推的射束g段307,在一定的磁场强度下可生成倒推的偏转射束f段306,射束f段306从偏转磁极3-4-1背侧射出后形成倒推的射束e段105,射束e段105从可升降的二级磁铁b3-2磁极b3-2-1的右侧壁射入。
93.3)射束304的形成
94.如图14所示,射束e段305的延长线深入到磁极b3-2-1之中,通过调整二级磁铁a3-1的磁场强度,调整直线射束c段303相对于y轴的夹角,使射束c段303在磁极b3-2-1的延长线与射束e段305在磁极b3-2-1延长线相较于o点,图中,a点为射束c段303进入磁极b3-2-1左侧边界时的位置,b点为射束e段305进入磁极b3-2-1右侧边界时的位置,要求距离oa等于距离ob。然后再做一个圆在a点和b点分别与射束c段303和射束e段305相切相连,连接a点和
4-2,环形压板b7-4-4的底面与一个电机b7-4-5连接,电机b7-4-5与转轴b7-4-1活动连接。电机b7-4-5可驱动转轴b7-4-1旋转,带动摆臂a7-3旋转。
105.轴承安装座b7-4-3一侧为弧面另一侧为与z轴平行的直面,其直面与一个上下表面与xy平面平行的摆臂b7-5一端的与z轴平行的直面连接。
106.如图22所示,摆臂b7-5另一端的圆形底面与一个轴心线与z轴平行的旋转机构c7-6连接,所述的旋转机构c7-6包括与一个圆板a7-6-1,圆板a7-6-1的上表面与摆臂b7-5另一端的圆形底面连接,圆板a7-6-1的下表面与一个轴心线与z轴平行的回旋轴7-6-2的内环连接,回旋轴7-7-2的外环与一个圆板b7-6-3连接,圆板b7-7-3的上表面与一个电机c7-7-4连接,电机c7-7-4置于回旋轴7-6-2的内环之中并与圆板a7-6-1活动连接。电机c7-7-4可驱动圆板a7-6-1旋转,带动摆臂b7-5旋转。
107.如图23所示,圆板b7-6-3的下表面与z轴方向上升机构b7-7连接,上升机构b7-7包含一个四个侧壁与z轴平行的四方形立柱7-7-1,四方形立柱7-7-1的上表面与圆板b7-6-3的下表面连接,四方形立柱7-7-1的四个侧壁分别与一个z轴方向的直线导轨b7-7-2连接,四个直线导轨b7-7-2分别与四组每组两个滑块b7-7-3连接,四组每组两个滑块b7-7-3分别与四个三角形支架7-7-4立壁的朝向方形立柱7-7-1的外侧壁连接,四个三角形支架7-7-4中一个支架立壁的内侧壁与一个z轴方向的直线驱动机构7-7-5连接,直线驱动机构7-7-5与四方形立柱7-7-1的一个侧壁活动连接;直线驱动机构7-7-5可驱动方形立柱7-7-1升降,带动旋转机构c7-6升降。
108.四个三角形支架7-7-4的底面与治疗床底座7-8的上表面连接。旋转机构a(-2)旋转机构b7-4、旋转机构c7-6和上升机构b7-7的共同作用,并通过摆臂a7-3和摆臂b7-5,可使床板7-1-1自旋、摆动和升降。
109.本实施例中,治疗床7是为环形影像引导定位系统安装框架6配做。如图24所述,治疗床7将床板7-1-1从左侧送入治疗区域,在影像引导定位系统的引导下,可使床板7-1-1承载患者体内肿瘤的靶心与等中心101重合。
110.如图25所述,治疗床7将床板7-1-1从左侧送入治疗区域。
111.如图24和图25所示,结合梯形束流配送系统安装框架5带动环形影像引导系统安装框架6以x轴为轴心的摆动,可实现围绕肿瘤的360
°
共面照射。
112.如图26所示,通过调整治疗床板7-1-1长边相对于x轴的角度,可实现非共面照射。降低治疗床板7-1-1的高度,相对地板的高度约70cm,可方便患者上下治疗床;提升治疗床板7-1-1的高度,相对地板的高度约130cm,可方便医务人员对患者的摆位。治疗床板7-1-1的升降也是影像引导定位的一个环节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1