用于评价直线加速器等中心质量的X射线透射图像分析的制作方法
用于评价直线加速器等中心质量的x射线透射图像分析
1.相关申请的交叉引用
2.本技术要求2021年4月19日提交的美国临时专利申请序列号为no.63/176,494的优先权,其通过引用整体并入本文。
技术领域
3.本发明大体上涉及辐射疗法,其中医用直线加速器(linac)将辐射束传递到患者体内的精确点。特别地,本发明涉及分析和显示用于评估linac的辐射等中心的质量的二维x射线透射图像。
背景技术:
4.1.1.linac概述
5.辐射疗法是一种癌症疗法,其使用强高能辐射束的束来杀死癌细胞。附图说明1-3示出了包括机架(gantry)102和诊察台(couch)106的医用直线加速器(linac)100。如图4所示,机架102包括准直器头104,其限定linac 100生成的辐射束412。在治疗期间,linac 100的机架102将辐射束传送到支撑在诊察台106上的患者(未示出)体内的精确位置。为了定制辐射治疗计划,机架102可以围绕患者旋转,并且诊察台106可以相对于机架102的旋转平面改变患者的方位。
6.如图2所示,机架102能够围绕患者旋转整个360
°
,以便优化辐射束进入患者体内。如图2所示,机架102可以围绕机架旋转轴线208旋转。如图3所示,诊察台106可围绕诊察台旋转轴线310旋转。这允许相对于机架102的旋转平面调整患者的方位,以便进一步优化辐射束104进入患者体内。
7.在理想的linac 100中,当机架102旋转时,辐射束将保持聚焦在空间中的固定点上(即,在患者的肿瘤上)。类似地,当患者由于诊察台106的旋转而移动时,理想的linac 100将保持肿瘤固定在辐射束内。
8.如图4所示,linac 100可以具有成像装置416(例如,电子入口成像装置(epid)),该成像装置416用于通过测量在治疗过程期间从辐射端口透射通过患者的x射线强度来在治疗之前验证患者的位置。
9.1.2辐射等中心
10.辐射疗法的目标是向肿瘤递送最高可能的辐射剂量,同时使对周围健康组织的剂量最小化。为此,辐射疗法包括以下目标:(1)当机架102旋转时保持辐射束精确地聚焦在患者的肿瘤上,以及(2)当诊察台106旋转时保持患者的肿瘤固定在辐射束内。然而,这两个目标很少被完美地实现。机架102通常在其自身的重量下弯曲,从而有效地使辐射束模糊。诊察台106的旋转通常也不是完全圆形的和/或诊察台106的旋转轴线310通常不与机架102的旋转轴线208相交。
11.为了使这些常见的linac缺陷的影响最小化,肿瘤应该被放置在空间中使最大的束对靶误差最小化的点处。该位置被称为等中心点。
12.1.3等中心尺寸
13.对于机架和诊察台旋转的所有组合的最大束轴线错位距离(beam axis miss distance)是等中心尺寸。较小的等中心点将导致更精确的治疗。
14.1.4现有方法
15.用于分析等中心点的现有方法包括两个主要步骤:(1)利用不同的机架和诊察台旋转测量位于(或接近)等中心点处的辐射不透过标记(radiation-opaque marker)的epid x射线透射图像;以及(2)分析图像以确定等中心点的尺寸。
16.图4所示的设置通常用于完成第一步骤。在图4中,linac 100通过放置在等中心处的辐射不透过标记414传送辐射束412。成像装置416在辐射束412通过标记414时获取辐射束412的二维透射图像。
17.在图5中示出了包括不透过辐射标记414的标记组件500的详细视图。在图5中,高密度球形标记414连接到低密度支撑杆502,该低密度支撑杆502然后连接到基部504。基部504设置在诊察台106的顶部,使得标记414可位于(或接近)等中心。
18.图6示出了通过标记414的典型图像600(例如,epid图像)。在图6中,暗方形区域602由曝光成像装置410的辐射束412的方形辐射场产生,而较亮的内部圆形604由位于辐射场内的辐射不透过标记414的阴影产生。
19.用于测量等中心点的现有方法包括将机架102旋转通过一组固定机架角度,同时诊察台106保持在0
°
,并获取每个机架位置的epid图像。当机架102保持固定在0
°
并且诊察台106旋转通过一组固定诊察台角度时,获得另外的epid图像。
20.现有方法的第二步骤包括分析上述图像以确定等中心点的尺寸。该步骤可以进一步分解为两个子过程:(2a)使用图像处理技术来找到每个图像(具有确定的场和标记位置的图像700的示例在图7中示出)中的场和标记414的中心;以及(2b)为所有获取的图像计算最大标记中心与场中心的距离,并将该最大值分配给等中心尺寸。
技术实现要素:
21.现有的用于分析等中心而获取的所有epid图像的场-标记距离的使用利用二维坐标系(cs)对复杂三维过程进行建模。现有的方法维护二维图像cs中的数据,该数据从epid图像获取。通过这样做,当问题出现在linac等中心时,常常难以直观地理解问题的性质。本发明的各方面可以克服现有方法的一个或多个问题(例如,通过替换和改进现有方法的子过程步骤2b)。
22.本发明的方面可以包括(1)使用直线加速器(linac)来获取不同机架和/或诊察台旋转的等中心处或附近定位的辐射不透过标记的辐射透射图像,以及(2)分析图像以确定等中心的尺寸、标记放置误差(即,相对于当前标记位置的等中心位置)和/或诊察台走出量(couch walkout)。分析图像可以包括在图像中找到辐射场和标记的中心。
23.关于确定等中心尺寸,不是比较场和标记中心以找到最大差异并将最大距离指定为等中心尺寸,而是linac可以将场和标记中心从二维(2d)图像坐标系(cs)变换为三维(3d)(例如,真实世界)cs。从2d图像cs移动到3d cs可以提供允许在3d中更灵活的分析和直观的显示的优点,其更准确地反映了底层过程。
24.在一些方面,在分析图像以表征linac的等中心时,linac可以不同地处理机架和
诊察台旋转。当机架旋转时,场移动,但标记不移动。类似地,当诊察台旋转时,标记移动,但场保持静止。在一些方面,linac因此可以将图像分组为两个类别:(1)用于确定等中心和/或确定标记放置误差的图像,其可以在诊察台保持在固定诊察台角度(例如,0
°
)时利用机架旋转来获取,以及(2)用于确定诊察台走出量的图像,其可以在机架保持在固定机架角度(例如,0
°
)时利用诊察台旋转来获取。
25.本发明的一个方面可以提供一种方法,包括根据二维(2d)辐射投射图像来确定直线加速器(linac)的一组三维(3d)辐射束轴线,其中该组3d辐射束轴线至少包括第一和第二3d辐射束轴线。该方法可以包括至少基于该组3d辐射束轴线来确定linac的辐射等中心。
26.在一些方面,确定第一3d辐射束轴线可以包括相对于参考机架角度以第一机架角度定位linac的机架,并且定位机架可以包括使机架围绕机架旋转轴线旋转。在一些方面,确定第一3d辐射束轴线可以包括,在以第一机架角度定位机架的情况下,使用linac生成第一辐射束。在一些方面,确定第一3d辐射束轴线可以包括,在以第一机架角度定位机架的情况下,使用linac的成像装置来获取第一二维(2d)辐射透射图像,第一二维(2d)辐射透射图像指示第一辐射束通过辐射不透过标记之后的辐射场。在一些方面,确定第一3d辐射束轴线可以包括基于第一2d辐射透射图像,确定第一辐射束的束轴线的位置和第一辐射束的辐射场中的辐射不透过标记的阴影的中心。在一些方面,确定第一3d辐射束轴线可以包括基于确定的第一辐射束的束轴线的位置、确定的第一辐射束的辐射场中的辐射不透过标记的阴影的中心以及第一机架角度,构造第一3d辐射束轴线。
27.在一些方面,构造第一3d辐射束轴线可以包括,使第一2d辐射透射图像围绕第一图像旋转轴线旋转,第一图像旋转轴线与确定的第一辐射束的辐射场中的辐射不透过标记的阴影的中心一致并且与机架旋转轴线平行。在一些方面,第一2d辐射透射图像可以旋转与第一机架角度相等的量。在一些方面,第一3d辐射束轴线可以与确定的旋转的第一2d辐射透射图像中的第一辐射束的束轴线的位置一致并且与旋转的第一2d辐射透射图像的平面垂直。
28.在一些替代方面,构造所述第一3d辐射束轴线可以包括:生成初始3d辐射束轴线,初始3d辐射束轴线与确定的第一2d辐射透射图像中的第一辐射束的束轴线的位置一致并且与第一2d辐射透射图像的平面垂直;和使初始3d辐射束轴线围绕第一图像旋转轴线旋转,第一图像旋转轴线与确定的第一辐射束的辐射场中的辐射不透过标记的阴影的中心一致并且与机架旋转轴线平行;并且初始3d辐射束轴线可以旋转与第一机架角度相等的量。
29.在一些方面,确定第二3d辐射束轴线可以包括相对于参考机架角度以第二机架角度定位linac的机架。在一些方面,确定第二3d辐射束轴线可以包括,在以第二机架角度定位机架的情况下,使用linac生成第二辐射束。在一些方面,确定第二3d辐射束轴线可以包括,在以第二机架角度定位机架的情况下,使用linac的成像装置获取第二2d辐射透射图像,第二2d辐射透射图像指示第二辐射束经过辐射不透过标记之后的辐射场。在一些方面,确定第二3d辐射束轴线可以包括基于第二2d辐射透射图像,确定第二辐射束的束轴线的位置和第二辐射束的辐射场中的辐射不透过标记的阴影的中心。在一些方面,确定第二3d辐射束轴线可以包括基于确定的第二辐射束的束轴线的位置、确定的第二辐射束的辐射场中的辐射不透过标记的阴影的中心以及第二机架角度,构造第二3d辐射束轴线。
30.在一些方面中,构造第二3d辐射束轴线可以包括使所述第二2d辐射透射图像围绕
第二图像旋转轴线旋转,第二图像旋转轴线与确定的第二辐射束的辐射场中的辐射不透过标记的阴影的中心一致并且与机架旋转轴线平行。在一些方面,第二2d辐射透射图像可以旋转与第二机架角度相等的量。在一些方面,第二3d辐射束轴线可以与确定的旋转的第二2d辐射透射图像中的第二辐射束的束轴线的位置一致并且与旋转的第二2d辐射透射图像的平面垂直。
31.在一些替代方面,构造第二3d辐射束轴线可以包括:生成初始第二3d辐射束轴线,初始第二3d辐射束轴线与确定的第二2d辐射透射图像中的第二辐射束的束轴线的位置一致并且与第二2d辐射透射图像的平面垂直;和使初始第二3d辐射束轴线围绕第二图像旋转轴线旋转,第二图像旋转轴线与确定的第二辐射束的辐射场中的辐射不透过标记的阴影的中心一致并且与机架旋转轴线平行;并且初始第二3d辐射束轴线可以旋转与第二机架角度相等的量。
32.在一些方面,在linac用于生成第一辐射束和第二辐射束并且linac的成像装置用于获取第一辐射透射图像和第二2d辐射透射图像的同时,可以以固定诊察台角度定位诊察台。
33.在一些方面,确定辐射等中心可以包括,对于一组3d辐射束轴线中的每个3d辐射束轴线,确定3d空间中的位置和3d辐射束轴线之间的束轴线错位距离。在一些方面,确定辐射等中心可以包括确定对于一组3d辐射束轴线中的3d辐射束轴线确定的束轴线错位距离中哪一个最大,并且对于一组3d辐射束轴线中的3d辐射束轴线确定的束轴线错位距离中最大的可以是位置的最大束轴线错位距离。在一些方面,确定辐射等中心可以包括在3d空间中找到具有最小的最大束轴线错位距离的位置。在一些方面,3d空间中的位置和3d辐射束轴线之间的束轴线错位距离可以是该位置和3d辐射束轴线之间的最短距离。在一些方面,辐射等中心的尺寸可以是该位置的最大射束轴线错位距离。
34.在一些方面,该方法还可以包括将肿瘤定位在确定的辐射等中心。
35.在一些方面,该方法可以进一步包括对于一组诊察台角度中的每个诊察台角度确定标记移动矢量(marker movement vector),并且一组诊察台角度至少可以包括相对于参考诊察台角度的第一诊察台角度和相对于参考诊察台角度的第二诊察台角度。在一些方面,该方法可以包括基于确定的标记移动矢量,对于一组诊察台角度中的诊察台角度与一组3d辐射束轴线中的3d辐射束轴线的每个组合确定标记与3d辐射束轴线误差距离,并且标记与3d辐射束轴线误差距离表示辐射不透过标记的位置和3d辐射束轴线误差之间的最短距离。
36.在一些方面中,确定用于第一诊察台角度的标记移动矢量可以包括,在以参考诊察台角度定位linac的诊察台并且以参考机架角度定位linac的机架的情况下,使用linac生成第一参考辐射束。在一些方面,在以参考诊察台角度定位诊察台并且以参考机架角度定位机架的情况下,使用linac的成像装置获取参考诊察台角度二维(2d)辐射透射图像,参考诊察台角度二维(2d)辐射透射图像指示第一参考辐射束经过辐射不透过标记之后的辐射场。在一些方面,确定用于第一诊察台角度的标记移动矢量可以包括基于参考诊察台角度2d辐射透射图像,确定第一参考辐射束的辐射场中的辐射不透过标记的阴影的中心。在一些方面,确定用于第一诊察台角度的标记移动矢量可以包括以第一诊察台角度定位诊察台。在一些方面,确定用于第一诊察台角度的标记移动矢量可以包括,在以第一诊察台角度
定位诊察台并且以参考机架角度定位机架的情况下,使用linac生成第二参考辐射束。在一些方面,确定用于第一诊察台角度的标记移动矢量可以包括,在以第一诊察台角度定位诊察台并且以参考机架角度定位机架的情况下,使用linac的成像装置获取第一诊察台角度2d辐射透射图像,第一诊察台角度2d辐射透射图像指示第二参考辐射束经过辐射不透过标记之后的辐射场。在一些方面,确定用于第一诊察台角度的标记移动矢量可以包括基于第一诊察台角度2d辐射透射图像,确定第二参考辐射束的辐射场中的辐射不透过标记的阴影的中心。在一些方面,确定用于第一诊察台角度的标记移动矢量可以包括基于第一参考辐射束的辐射场中的辐射不透过标记的阴影的中心与第二参考辐射束的辐射场中的辐射不透过标记的阴影的中心的比较,确定第一诊察台角度的标记移动矢量。
37.在一些方面,确定第二诊察台角度的标记移动矢量可以包括以第二诊察台角度定位诊察台。在一些方面,确定第二诊察台角度的标记移动矢量可以包括,在以第二诊察台角度定位诊察台并且以参考机架角度定位机架的情况下,使用linac生成第三参考辐射束。在一些方面,确定第二诊察台角度的标记移动矢量可以包括,在以第二诊察台角度定位诊察台并且以参考机架角度定位机架的情况下,使用linac的成像装置获取第二诊察台角度2d辐射透射图像,第二诊察台角度2d辐射透射图像指示第三参考辐射束经过辐射不透过标记之后的辐射场。在一些方面,确定第二诊察台角度的标记移动矢量可以包括基于第二诊察台角度2d辐射透射图像,确定第三参考辐射束的辐射场中的辐射不透过标记的阴影的中心。在一些方面,确定第二诊察台角度的标记移动矢量可以包括基于第一参考辐射束的辐射场中的辐射不透过标记的阴影的中心与第三参考辐射束的辐射场中的辐射不透过标记的阴影的中心的比较,确定第二诊察台角度的标记移动矢量。
38.在一些方面,该方法可以进一步包括确定临床等中心,其中,确定临床等中心包括确定使最大的标记与3d辐射束轴线误差距离最小化的空间位置。在一些方面,确定使最大的标记与3d辐射束轴线误差距离最小化的空间位置可以包括基于不同诊察台角度下的辐射不透过标记的阴影,预测诊察台旋转轴线。在一些方面,确定使最大的标记与3d辐射束轴线误差距离最小化的空间位置可以包括预测辐射不透过标记在新的参考位置处的一组位置,该一组位置通过围绕预测的诊察台旋转轴线的诊察台旋转而移位。在一些方面,确定使最大的标记与3d辐射束轴线误差距离最小化的空间位置可以包括基于确定的标记移动矢量,对于一组诊察台角度中的诊察台角度和一组3d辐射束轴线中的3d辐射束轴线的每个组合确定预测的标记与3d辐射束轴线误差距离,并且预测的标记与3d辐射束轴线误差距离可以表示辐射不透过标记的位置和3d辐射束轴线误差之间的最短距离。在一些方面,确定使最大的标记与3d辐射束轴线误差距离最小化的空间位置可以包括确定使最大的标记与束轴线误差距离最小化的参考标记位置。在一些方面,该方法可以进一步包括将肿瘤置于确定的临床等中心。
39.本发明的另一方面可以提供一种设备,该设备被配置为:根据二维(2d)辐射透射图像,确定直线加速器(linac)的一组三维(3d)辐射束轴线,并且一组3d辐射束轴线包括至少第一3d辐射束轴线和第二3d辐射束轴线。该设备可以被配置为至少基于一组3d辐射束轴线,确定linac的辐射等中心。
40.本发明的又一方面可以提供一种方法,该方法包括对于直线加速器(linac)的一组诊察台角度中的每个诊察台角度确定标记移动矢量,并且一组诊察台角度至少包括相对
于参考诊察台角度的第一诊察台角度和相对于参考诊察台角度的第二诊察台角度。该方法卡伊包括基于确定的标记移动矢量,对于一组诊察台角度中的诊察台角度与一组3d辐射束轴线中的3d辐射束轴线的每个组合确定标记与3d辐射束轴线误差距离,并且标记与3d辐射束轴线误差距离表示辐射不透过标记的位置和3d辐射束轴线误差之间的最短距离。
41.本发明的又一方面可以提供一种设备,该设备被配置为对于直线加速器(linac)的一组诊察台角度中的每个诊察台角度确定标记移动矢量,并且一组诊察台角度可以至少包括相对于参考诊察台角度的第一诊察台角度和相对于参考诊察台角度的第二诊察台角度。该设备可以被配置为基于确定的标记移动矢量,对于一组诊察台角度中的诊察台角度与一组3d辐射束轴线中的3d辐射束轴线的每个组合确定标记与3d辐射束轴线误差距离,并且标记与3d辐射束轴线误差距离可以表示辐射不透过标记的位置和3d辐射束轴线误差之间的最短距离。
42.本发明的又一方面可以提供一种计算机程序,其包括用于使设备适于执行上述任何方法的指令。本发明的又一方面可以提供包含计算机程序的载体,并且载体可以是电信号、光信号、无线电信号或计算机可读存储介质中的一种。
43.本发明的又一方面可以提供一种包括处理电路和存储器的设备。该存储器可以包含可以由处理电路执行的指令,由此该设备可操作以执行上述任何方法。
44.本发明的又一方面可以提供一种适于上述任何方法的设备。
45.本发明的又一方面可以提供上述方面的任何组合。
46.在下面的本发明的详细描述中描述了包含在系统和方法内的进一步变化。
附图说明
47.结合于此并形成说明书的一部分的附图示出了本发明的各种非限制性实施例。在附图中,相同的附图标记表示相同或功能相似的元件。
48.图1示出了医用直线加速器(linac)。
49.图2示出linac的机架的旋转。
50.图3示出了linac的诊察台的旋转。
51.图4示出了linac的辐射束和成像面板。
52.图5示出了根据一些方面的标记组件。
53.图6示出了根据一些方面的未处理的辐射透射图像。
54.图7示出了根据一些方面的经处理的辐射透射图像。
55.图8示出了根据一些方面的辐射不透过标记和辐射场中心的位置的差异。
56.图9示出了根据一些方面的经处理的二维图像,其示出了找到的辐射场、辐射场的中心、标记的找到的阴影以及辐射场中心轴线。
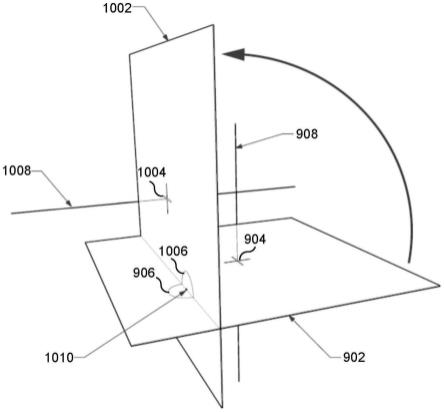
57.图10示出了根据一些方面的原始二维图像围绕标记的阴影的中心旋转到新位置的量和方向,该量和方向对应于图像采集时机架旋转的量和方向。
58.图11示出了根据一些方面的已经从二维图像坐标变换成三维真实世界坐标并限定等中心的束轴线的叠加。
59.图12示出了根据一些方面的在不同诊察台旋转角度处的诊察台标记走出位置以及用于机架和诊察台角度的组合的肿瘤束轴线错位距离的计算。
60.图13示出了根据一些方面的过程。
61.图14示出了根据一些方面的用于确定第一3d辐射束轴线的过程。
62.图15示出了根据一些方面的用于确定辐射等中心点的过程。
63.图16示出了根据一些方面的用于确定诊察台走出量的过程。
64.图17示出了根据一些方面的用于确定诊察台角度的标记移动矢量的过程。
65.图18示出了根据一些方面的linac的控制器。
66.图19示出了根据一些方面的设备。
具体实施方式
67.在本技术中,术语“束轴线”可以是表示辐射束中心的三维矢量。
68.在本技术中,术语“束轴线错位距离”可以是目标(例如,肿瘤中心)与沿着束轴线的任何点之间的最短距离。
69.在本技术中,术语“cs”或“坐标系”可以是例如二维(2d)cs,诸如图像(例如epid图像)的cs,或三维(3d)cs,诸如直线加速器(linac)(例如linac 100)的3d cs。
70.在本技术中,术语“诊察台走出量”可以是当诊察台106旋转通过其整个运动范围时,患者的肿瘤(如果位于(或接近)等中心)移动的量。
71.在本技术中,术语“诊察台”可以是支撑患者的linac(例如linac 100)的部件(例如诊察台106)。
72.在本技术中,术语“成像装置”(例如,电子射野成像装置(epid))可以是linac(例如,linac 100)的部件(例如,成像装置416),其测量从辐射端口(例如,在治疗期间)透射通过患者的x射线强度。例如,成像装置可以将辐射信号电子地转换为二维(2d)数字射线照相图像,以验证与患者的解剖结构相关的正确的束放置。
73.在本技术中,术语“机架”可以是linac(例如linac 100)的部件(例如机架102),其在传递辐射束的同时围绕患者旋转。
74.在本技术中,术语“等中心”可以是使所有机架角度的辐射束轴线错位距离最小化的空间位置。
75.在本技术中,术语“标记放置误差”可以是在获取用于分析等中心的epid图像时真实linac等中心位置和标记的放置位置之间的三维矢量。
76.在一些方面,linac 100可以(1)利用不同的机架和/或诊察台旋转获取位于(或接近)等中心处的辐射不透过标记414的辐射透射图像,以及(2)分析图像以确定等中心的尺寸、标记放置误差(即,相对于当前标记位置的等中心位置)、和/或诊察台走出量。分析图像可以包括在图像中找到辐射场和标记的中心。
77.2.1等中心
78.在一些方面,确定等中心可以涉及分析图像(例如,epid图像),其中诊察台106保持在固定诊察台角度(例如,0
°
),同时改变机架角度(例如,通过其整个运动范围)。在一些方面,确定等中心可以涉及仅分析图像,其中诊察台106保持在固定诊察台角度而机架角度变化。一些方面可以包括确定辐射束的束轴线在图像中的位置,以及在图像中找到标记414的中心(参见,例如,图6-8)。如图9和10中所示,一些方面可以包括将束轴线位置和标记中心从二维(2d)图像坐标系(cs)变换为三维(3d)cs。在一些方面,如图9和10所示,因为机架
102旋转,同时标记414保持固定在空间中,从2d图像cs到3d(例如,真实世界)cs的变换可以使用标记414的阴影906作为固定参考点(例如,所有的束轴线确定将相对于标记位置,这是空间中的固定点)。
79.在一些方面,如图9所示,表征等中心可以包括,对于由linac 100的成像装置416(例如,epid)在机架102旋转并且诊察台角度保持固定时获取的每个图像,使用图像处理技术来(i)确定使用linac 100的机架102生成的辐射束412的束轴线908的位置,以及(ii)在辐射束412的辐射场902中找到标记414的阴影906的中心。在一些方面,确定束轴线908的位置可以包括找到使用linac 100的机架102生成的辐射束412的辐射场902的中心904。在一些替代方面,确定束轴线908的位置可包括找到使用linac 100的机架102在(i)第一准直器角度和(ii)与第一准直器角度相差180度的第二准直器角度处生成的辐射场412的中心904的平均值(例如,以在辐射场未被良好校准的情况下考虑误差)。
80.在一些方面,如图10所示,表征等中心可以包括,对于由成像装置416在机架102旋转并且诊察台角度保持固定时获取的每个图像,构造与确定的图像中的束轴线908的位置一致并且垂直于成像平面的束轴线908。如图10所示,一些方面可以包括,对于由成像装置416在机架102旋转并且诊察台角度保持固定时获取的每个图像(除了以0
°
的机架角度获取的图像,对于0
°
的机架角度将不需要旋转),围绕标记414的阴影906的中心1010将构造的束轴线908旋转到新的位置,旋转的量和方向等于在获取图像时使用的机架旋转。如图10所示,一些替代方面可以包括,对于由成像装置416在机架102旋转并且诊察台角度保持固定时获取的每个图像(除了以0
°
的机架角度获取的图像,对于0
°
的机架角度将不需要旋转),围绕第一图像旋转轴线旋转第一2d辐射透射图像,该第一图像旋转轴线与确定的第一辐射束的辐射场中的辐射不透过标记的阴影的中心一致并且与机架旋转轴线线平行,第一2d辐射透射图像可以以等于机架旋转角度的量旋转,并且第一3d辐射束轴线可以与确定的旋转的第一2d辐射透射图像中的第一辐射束的束轴线的位置一致,并且垂直于旋转的第一2d辐射透射图像的平面。图10示出了根据一些方面的旋转辐射场1002、旋转辐射场1002的中心1004、旋转辐射场1002中的标记414的阴影1006、以及旋转束轴线1008。
81.在一些方面,如图11所示,以等于机架旋转角度的量旋转构造的束轴线(或者以等于机架旋转角度的量旋转图像并且使用旋转的图像构造束轴线)可以在辐射束412的辐射场1102中创建标记414的公共阴影1106的一组三维束轴线(例如,包括旋转的束轴线1008、1110和1112,以及以0
°
的机架旋转角度构造的束轴线1108),其中机架102处于0
°
的机架旋转角度(以及诊察台106处于固定的诊察台角度)作为参考点(例如,用于计算等中心1114)。一些方面可以包括使用三维束轴线(例如,包括3d束轴线1008、1108、1110和1112)来计算等中心1114。一些方面可以包括通过在空间中找到最小化该点与所有三维束轴线之间的最大束轴线错位距离的点来计算等中心1114。一些方面可以包括将等中心的尺寸确定为等中心1114的中心与所考虑的所有三维束轴线之间的最大错位距离。
82.2.2标记放置误差
83.在一些方面,在上面2.1节中描述的三维等中心分析可以具有将任何标记放置误差与所得到的等中心尺寸去耦的额外益处。例如,如图11所示,标记定位误差可以被确定为矢量1116,该矢量1116从(a)在辐射束412的辐射场1102中的标记414的阴影1106的中心,其中机架102处于0
°
的机架旋转角度(以及诊察台106处于固定的诊察台角度)到(b)找到的等
中心1114的位置。
84.2.3诊察台走出量
85.一些方面可以包括执行诊察台走出量确定,以确定当诊察台106旋转时放置在等中心1114处的肿瘤将移动多少。在一些方面中,与其中标记414保持固定且辐射场随着机架102旋转而变化的等中心确定相反,linac 100可利用固定辐射场(例如,机架102以固定机架角度定位)和(潜在地)随着诊察台106旋转而移动的标记414进行诊察台走出量测量。
86.在一些方面中,测量诊察台走出量可包括,对于由linac 100的成像装置416(例如,epid)在诊察台106旋转且机架角度保持固定时获取的每个图像,使用图像处理技术来在使用机架102生成的辐射束的辐射场中找到标记414的阴影的中心。例如,如图12所示,其中机架102处于固定机架角度(例如,0
°
),标记414的阴影1106的中心与诊察台106处于0
°
的诊察台角度,并且标记414的阴影(例如,阴影1202,1204,1206和1208)的中心可以在诊察台106处于不同的非零诊察台角度的情况下找到。
87.一些方面可以包括使用标记414的阴影1106在辐射场中的位置,其中诊察台106处于0
°
诊察台角度作为基线,并且利用非零诊察台旋转从每个图像计算标记414的阴影的移动矢量。图12用虚线示出了从诊察台106处于0
°
诊察台角度的标记414的阴影1106的中心到诊察台106处于非零诊察台角度的标记414的每个阴影1202,1204,1206和1208的中心的移动矢量。
88.对于机架旋转和诊察台旋转的不同组合,一些方面可以包括计算在诊察台角度处的标记414和在机架角度处的三维束轴线之间的误差距离。例如,如图12所示,可以计算在特定非零诊察台角度的标记414的阴影1208和在特定非零机架角度的三维束轴线1112之间的标记与束轴线距离1210。
89.在一些方面,计算对于机架旋转和诊察台旋转的所有组合的标记与束轴线距离可以允许理解对于机架和诊察台角度的所有组合,辐射束将错位肿瘤多少(即使对于诊察台旋转的图像可能已经全部获得,其中机架106固定在一个角度)。
90.2.4流程图
91.图13示出了根据一些方面的过程1300。在一些方面,过程1300的一个或多个步骤可以由linac 100(例如,linac 100的控制器)执行。在一些方面中,过程1300的一个或多个步骤可附加地或替代地由设备(例如,图19的设备1900)执行。在一些方面中,过程1300可包括确定一组三维(3d)辐射束轴线(例如,辐射束轴线1008,1108,1112和1114)的步骤1302。在一些方面,该一组3d辐射束轴线可以包括至少第一和第二3d辐射束轴线1008和1110。在一些方面,过程1300可以包括步骤1304,其基于至少一组3d辐射束轴线来确定辐射等中心1114。
92.图14示出了根据一些方面的用于确定第一3d辐射束轴线1008的过程1400。在一些方面,过程1400的一个或多个步骤可以由linac 100(例如,linac 100的控制器)执行。在一些方面中,过程1400的一个或多个步骤可额外地或替代地由设备(例如,图19的设备1900)执行。在一些方面中,过程1400可以在图13所示的过程1300的步骤1302中执行。
93.在一些方面中,过程1400可包括步骤1402,其将linac 100的机架102相对于参考机架角度(例如,0
°
)以第一机架角度(例如,90
°
)定位。在一些方面,定位机架102可包括围绕机架旋转轴线208旋转机架102。
94.在一些方面中,过程1400可包括步骤1404,在机架102以第一机架角度定位的情况下,使用linac 100来产生第一辐射束。在一些方面中,过程1400可包括步骤1406,在机架102以第一机架角度定位的情况下,使用linac 100的成像装置416来获取第一二维(2d)辐射透射图像,所述第一二维(2d)辐射透射图像指示第一辐射束在通过辐射不透过标记414之后的辐射场902。在一些方面,如图9所示,过程1400可以包括步骤1408,其基于第一2d辐射透射图像来确定第一辐射束的束轴线908的位置和第一辐射束的辐射场902中的辐射不透过标记414的阴影906的中心。
95.在一些方面,过程1400可以包括步骤1410,其基于确定的第一辐射束的束轴线908的位置、确定的第一辐射束的辐射场902中的辐射不透过标记414的阴影906的中心、以及第一机架角度,来构造第一3d辐射束轴线1008。在一些方面,如图10所示,构造第一3d辐射束轴线1008的步骤1410可以包括围绕第一图像旋转轴线旋转第一2d辐射透射图像,该第一图像旋转轴线与确定的第一辐射束的辐射场902中的辐射不透过标记414的阴影906的中心一致,并且与机架旋转轴线208平行。在一些方面,第一2d辐射透射图像可以以等于第一机架角度的量旋转。在一些方面,如图10所示,第一3d辐射束轴线1008可以与确定的旋转的第一2d辐射透射图像中的第一辐射束的束轴线的位置一致,并且垂直于旋转的2d第一辐射透射图像的平面。
96.在一些替代方面,如图10所示,构造第一3d辐射束轴线1008的步骤1410可以包括:(i)生成初始3d辐射束轴线908,其与与确定的第一2d辐射透射图像中的第一辐射束的束轴线908的位置一致,并且垂直于第一2d辐射透射图像的平面;以及(ii)围绕第一图像旋转轴线旋转初始3d辐射束轴线,第一图像旋转轴线与确定的第一辐射束的辐射场中的辐射不透过标记414的阴影906的中心一致并且平行于机架旋转轴线。在一些方面,初始3d辐射束轴线可以以等于第一机架角度的量旋转。
97.在一些方面中,确定第二3d辐射束轴线1110(例如,在过程1300的步骤1302中)可包括将linac 100的机架102相对于参考机架角度(例如,0
°
)以第二机架角度(例如,180
°
)定位。在一些方面中,确定第二3d辐射束轴线1110可包括,在机架102以第二机架角度定位的情况下,使用linac 100来产生第二辐射束。在一些方面中,确定第二3d辐射束轴线1110可包括,在机架102以第二机架角度定位的情况下,使用linac 100的成像装置416来获取第二2d辐射透射图像,所述第二2d辐射透射图像指示第二辐射束在通过辐射不透过标记414之后的辐射场。在一些方面,确定第二3d辐射束轴线1110可以包括基于第二2d辐射透射图像来确定第二辐射束的束轴线的位置和第二辐射束的辐射场中的辐射不透过标记414的阴影的中心。在一些方面中,确定第二3d辐射束轴线1110可包括基于确定的第二辐射束的束轴线的位置、确定的辐射不透过标记414的阴影在第二辐射束的辐射场中的中心、以及第二机架角度,来构造第二3d辐射束轴线1110。
98.在一些方面中,构造第二3d辐射束轴线1110(例如,在过程1300的步骤1302中)可包括围绕第二图像旋转轴线旋转第二2d辐射透射图像,所述第二图像旋转轴线与确定的第二辐射束的辐射场中的辐射不透过标记414的阴影的中心一致并平行于机架旋转轴线208。在一些方面,第二2d辐射透射图像可以以等于第二机架角度的量旋转。在一些方面,第二3d辐射束轴线可以与与确定的旋转的第二2d辐射透射图像中的第二辐射束的束轴线的位置一致,并且垂直于旋转的第二2d辐射透射图像的平面。
99.在一些方面中,构建第二3d辐射束轴线1110(例如,在过程1300的步骤1302中)可包括(i)产生初始第二3d辐射束轴线,其与与确定的第二2d辐射透射图像中的第二辐射束的束轴线的位置一致,且垂直于第二2d辐射透射图像的平面,和(ii)围绕第二图像旋转轴线旋转初始第二3d辐射束轴线,第二图像旋转轴线与确定的第二辐射束的辐射场中的辐射不透过标记的阴影的中心一致并且与机架旋转轴线平行。在一些方面,初始第二3d辐射束轴线可以以等于第二机架角度的量旋转。
100.在一些方面,诊察台106可以以固定的诊察台角度(例如,0
°
)定位,同时linac 100用于产生第一和第二辐射束,并且linac的成像装置用于获取第一和第二2d辐射透射图像(例如,在过程1300的步骤1302中和/或至少在过程1400的步骤1402,1404和1406中)。
101.图15示出了根据一些方面的用于确定辐射等中心1114的过程1500。在一些方面,过程1500的一个或多个步骤可以由linac 100(例如,linac 100的控制器)执行。在一些方面中,过程1500的一个或多个步骤可附加地或替代地由设备(例如,图19的设备1900)执行。在一些方面,过程1500可在图13所示的过程1300的步骤1304中执行。
102.在一些方面中,过程1500可包括步骤1502,其针对一组3d辐射束轴线(例如,包括3d辐射束轴线1008,1108,1112和1114)中的每个3d辐射束轴线,确定3d空间中的位置与3d辐射束轴线之间的束轴线错位距离。在一些方面,3d空间中的位置与3d辐射束轴线之间的束轴线错位距离可以是该位置与3d辐射束轴线之间的最短距离。在一些方面中,过程1500可包括步骤1504,其确定对于一组3d辐射束轴线的3d辐射束轴线确定的束轴线错位距离中哪一个最大。在一些方面,对于一组3d辐射束轴线中的3d辐射束轴线确定的束轴线错位距离中最大的是该位置的最大束轴线错位距离。在一些方面中,过程1500可包括步骤1506,其在3d空间中找到具有最小的最大束轴线错位距离的位置。在一些方面,辐射等中心1114的尺寸可以是该位置的最大束轴线错位距离。在一些替代方面中,代替找到使最大束轴线距离最小化的位置,可使用其它度量(例如,使束轴线错位距离的平均值最小化,使束轴线错位距离的均方根误差最小化,或其组合)。
103.在一些方面,如图13所示,过程1300可以包括确定标记放置误差的可选步骤1306。一些方面可以包括将标记放置误差确定为矢量,该矢量从辐射场中的辐射不透过标记414的阴影中心到所确定的辐射等中心1114。在一些方面中,过程1300可包括使用所确定的标记放置误差来将辐射不透过标记414移动到所确定的辐射等中心1114。
104.在一些方面,如图13所示,过程1300可以包括确定诊察台走出量的可选步骤1308。
105.在一些方面,如图13所示,过程1300可以包括将肿瘤定位在所确定的辐射等中心1114处的可选步骤1310。
106.图16示出了根据一些方面的用于确定诊察台走出量的过程1600。在一些方面,过程1600的一个或多个步骤可以由linac 100(例如,linac 100的控制器)执行。在一些方面中,过程1600的一个或多个步骤可额外地或替代地由设备(例如,图19的设备1900)执行。在一些方面,过程1600可在图13所示的过程1300的步骤1308中执行。
107.在一些方面中,过程1600可包括步骤1602,其确定一组诊察台角度中的每一诊察台角度的标记移动矢量。在一些方面,该一组诊察台角度可以包括相对于基准诊察台角度(例如,0
°
)的至少第一诊察台角度和相对于参考诊察台角度的第二诊察台角度。在一些方面,过程1600可包括步骤1604,其基于所确定的标记移动矢量,对于一组诊察台角度的诊察
台角度与一组3d辐射束轴线的3d辐射束轴线的每个组合的来确定标记与3d辐射束轴线误差距离(例如,标记与3d辐射束轴线误差距离1210)。在一些方面,标记与3d辐射束轴线误差距离可以表示辐射不透过标记的位置和3d辐射束轴线误差之间的最短距离。
108.图17示出了用于针对一些方面确定诊察台角度(例如,第一诊察台角度)的标记移动矢量的过程1700。在一些方面,过程1700的一个或多个步骤可以由linac 100(例如,linac100的控制器)执行。在一些方面中,过程1700的一个或多个步骤可附加地或替代地由设备(例如,图19的设备置1900)执行。在一些方面,过程1700可以在过程1600的步骤1602和/或在图13所示的过程1300的步骤1308中执行。
109.在一些方面中,过程1700可包括步骤1702,其中linac 100的诊察台106以参考诊察台角度定位且linac 100的机架102以参考机架角度(例如,0
°
)定位,使用linac 100产生第一参考辐射束。在一些方面中,过程1700可包括步骤1704,在诊察台106以参考诊察台角度定位且机架102以参考机架角度定位的情况下,使用linac 100的成像装置416来获取参考诊察台角度二维(2d)辐射透射图像,所述参考诊察台角度二维(2d)辐射透射图像指示第一参考辐射束在通过辐射不透过标记414之后的辐射场1102。在一些方面,过程1700可以包括步骤1706,其基于参考诊察台角度2d辐射透射图像,来确定第一参考辐射束的辐射场1102中的辐射不透过标记414的阴影1106的中心。
110.在一些方面,过程1700可包括以第一诊察台角度定位诊察台的步骤1708。在一些方面中,过程1700可包括步骤1710,在诊察台106以第一诊察台角度定位且机架102以参考机架角度定位的情况下,使用linac 100来产生第二参考辐射束。在一些方面中,过程1700可包括步骤1712:在诊察台106以第一诊察台角度定位且机架102以参考机架角度定位的情况下,使用linac 100的成像装置416来获取第一诊察台角度2d辐射透射图像,所述第一诊察台角度2d辐射透射图像指示第二参考辐射束在通过辐射不透过标记之后的辐射场。在一些方面,过程1700可以包括步骤1714,其基于第一诊察台角度2d辐射透射图像来确定第二参考辐射束的辐射场中的辐射不透过标记414的阴影1208的中心。在一些方面,过程1700可以包括步骤1716,其基于第一参考辐射束的辐射场1102中的辐射不透过标记414的阴影1106的中心与第二参考辐射束的辐射场中的辐射不透过标记的阴影1208的中心的比较,来确定第一诊察台角度的标记移动矢量。
111.在一些方面,在步骤1602中确定第二诊察台角度的标记移动矢量可以包括将诊察台106定位在第二诊察台角度。在一些方面中,在步骤1602中确定第二诊察台角度的标记移动矢量可包括,在诊察台106位于第二诊察台角度且机架102位于参考机架角度的情况下,使用linac 100来产生第三参考辐射束。在一些方面,在步骤1602中确定第二诊察台角度的标记移动矢量可以包括,在诊察台106位于第二诊察台角度并且机架102位于参考机架角度的情况下,使用linac 100的成像装置416来获取第二诊察台角度2d辐射透射图像,该图像指示在通过辐射不透过标记414之后第三参考辐射束的辐射场。在一些方面,在步骤1602中确定第二诊察台角度的标记移动矢量可以包括基于第二诊察台角度2d辐射透射图像,确定第三参考辐射束的辐射场中的辐射不透过标记414的阴影1206的中心。在一些方面,在步骤1602中确定第二诊察台角度的标记移动矢量可以包括基于第一参考辐射束的辐射场1102中的辐射不透过标记414的阴影1106的中心与第三参考辐射束的辐射场中的辐射不透过标记的阴影1206的中心的比较,来确定第二诊察台角度的标记移动矢量。
112.在一些方面中,过程1600可进一步包括确定临诊察台等中心。在一些方面,确定临诊察台等中心可以包括确定使最大标记与射束轴线误差距离最小化的空间位置。在一些方面中,确定使最大标记与3d辐射束轴线误差距离最小化的空间位置可包括基于辐射不透过标记在不同诊察台角度下的阴影,来预测诊察台旋转轴线。在一些方面中,确定使最大标记与3d辐射束轴线误差距离最小化的空间位置可包括预测辐射不透过标记414在新的参考位置处的一组位置,该一组位置通过围绕预测的诊察台旋转轴线的诊察台旋转而移位。在一些方面中,确定使最大标记与束轴线误差距离最小化的空间位置可包含基于所确定的标记移动矢量,对一组诊察台角度的诊察台角度与一组3d辐射束轴线的3d辐射束轴线的每个组合来确定预测的标记与3d辐射束轴线误差距离,且预测的标记与3d辐射束轴线误差距离可表示辐射不透过标记的位置与3d辐射束轴线误差之间的最短距离。在一些方面,确定使最大标记与束轴线误差距离最小化的空间位置可以包括确定使最大标记与束轴线误差距离最小化的参考标记位置。在一些方面中,过程1600可进一步包括将肿瘤置于所确定的临诊察台等中心的步骤。
113.2.5直线加速器控制器
114.图18是根据一些方面的linac 100的控制器1800的框图。如图18所示,控制器1800可以包括:处理电路(pc)1802,其可以包括一个或多个处理器(p)1855(例如,一个或多个通用微处理器和/或一个或多个其他处理器,诸如专用集成电路(asic)、现场可编程门阵列(fpga)等),这些处理器可以共同位于单个外壳中或单个数据中心中,或者可以是地理分布的(即,系统可以是分布式计算设备);网络接口1868,包括发射机(tx)1865和接收机(rx)1867,用于使控制器1800能够向连接到网络1810(例如,因特网协议(ip)网络)的其他节点发送数据并从其接收数据,网络接口1868连接到该网络1810;机架旋转器1850,其被配置为围绕机架旋转轴线208旋转机架102;诊察台旋转器1852,其被构造成使诊察台106绕诊察台旋转轴线310旋转;辐射束发生器1854,其被配置为在linac 100的波导中产生电子束;以及本地存储单元(又名“数据存储系统”)1808,其可包括一个或多个非易失性存储装置和/或一个或多个易失性存储装置。在pc 1802包括可编程处理器的方面,可以提供计算机程序产品(cpp)1841。在一些方面,cpp 1841可以包括存储计算机程序(cp)1843的计算机可读介质(crm)1842,该计算机程序(cp)1843包括计算机可读指令(cri)1844。在一些方面,crm 1842可以是非暂时性计算机可读介质,例如磁介质(例如硬盘)、光介质、存储器装置(例如随机存取存储器,闪存)等。在一些方面中,计算机程序1843的cri 1844可经配置以使得当由pc 1802执行时,cri致使linac 100执行本文所描述的步骤(例如,本文参考本文的流程图所描述的一个或多个步骤)。在其它方面中,控制器1800可经配置以在不需要代码的情况下执行本文所述的步骤。即,例如,pc 1802可以仅由一个或多个asic组成。因此,这里描述的方面的特征可以用硬件和/或软件来实现。
115.2.6设备
116.图19是根据一些方面的设备1900的框图。如图19所示,设备1900可以包括:处理电路(pc)1902,其可以包括一个或多个处理器(p)1955(例如,一个或多个通用微处理器和/或一个或多个其它处理器,诸如专用集成电路(asic),现场可编程门阵列(fpga)等),所述处理器可以共同位于单个外壳中或单个数据中心中,或者可以是地理分布的(即,系统可以是分布式计算设备);网络接口1968,包括发射机(tx)1965和接收机(rx)1967,用于使设备
1900能够向连接到网络1910(例如,因特网协议(ip)网络)的其他节点发送数据并从其接收数据,网络接口1968连接到该网络1910;和本地存储单元(又名“数据存储系统”)1908,其可包括一个或多个非易失性存储装置和/或一个或多个易失性存储装置。在pc 1902包括可编程处理器的方面,可以提供计算机程序产品(cpp)1941。在一些方面,cpp 1941可包括存储计算机程序(cp)1943的计算机可读介质(crm)1942,该计算机程序(cp)1943包括计算机可读指令(cri)1944。在一些方面,crm 1942可以是非暂时性计算机可读介质,例如磁介质(例如硬盘)、光介质、存储器装置(例如随机存取存储器,闪存)等。在一些方面中,计算机程序1943的cri 1944可经配置以使得当由pc 1902执行时,cri致使设备1900执行本文描述的步骤(例如,本文参考本文的流程图描述的一个或多个步骤)。在其它方面中,设备1900可经配置以在不需要代码的情况下执行本文所述的步骤。即,例如,pc 1902可以仅由一个或多个asic组成。因此,这里描述的方面的特征可以用硬件和/或软件来实现。
117.虽然在这里描述了各种实施例,但是应当理解,它们仅以示例的方式给出,而不是限制。因此,本公开的广度和范围不应受上述示例性实施例中的任何一个的限制。此外,除非本文另有说明或与上下文明显矛盾,否则上述要素在其所有可能变化中的任何组合都被本公开涵盖。
118.另外,虽然上述和附图中所示的过程被示为一系列步骤,但是这仅仅是为了说明的目的而完成的。因此,可以设想可以添加一些步骤,可以省略一些步骤,可以重新安排步骤的顺序,并且可以并行地执行一些步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1