一种主从操作微创手术机器人系统
1.本发明涉及机器人技术领域,特别是涉及一种主从操作微创手术机器人系统。
背景技术:
2.目前,由于传统手术在工作环境狭窄和缓解手术医生的疲劳程度等人为因素的局限性,手术机器人系统得以发展。现代微创手术给传统手术带来了巨大的变革,手术机器人也越来越广泛地运用在现代微创手术领域。
3.作为现代医疗领域的重要组成部分,手术机器人已得到外科医生广泛认可,相比于以往的传统手术而言,手术机器人能够减少手术对病人的创伤和缩短手术恢复周期,也能让手术医生在复杂的手术环境中更好地适应,更好地完成手术,具有高度可靠性、高度精确性和高度准确性。
4.目前,微创手术机器人取得了突破性的进展,如美国直觉公司的达芬奇手术机器人,中国“妙手”腹腔微创手术机器人等。但目前,临床上应用的手术机器人体积过于庞大,且进入人体内的从手臂仍为直杆型结构,因而灵活性不足。
5.微创手术机器人系统能够较好的解决术中腹腔镜移动过程中的抖动,使其更加平稳移动,从而让图像系统反馈的影像更加清晰稳定。同时,还可以预先设定腹腔镜的运动轨迹,并在实际术中由医生实现实时调整,但灵活度有待提高。
6.在国外,以达芬奇为代表的微创手术机器人最为经典,但其缺点明显,体积过于庞大,结构居高临下;安装、调试比较复杂,术前准备过程较长;购置费用高,耗材费用高和维修费用高。
7.目前,唯一应用于甲状腺外科的达芬奇手术机器人已经能够完成头颈部病灶组织切除以及淋巴结的清扫,但存在的问题有:(1)普遍采用经双侧腋窝乳晕四孔入路,创伤点多;(2)内窥镜无法弯曲,灵活度不足,导致术野受限;(3)机器人力反馈缺失,易导致操作力度误判带来重要器官损伤。
技术实现要素:
8.本发明的目的是提供一种主从操作微创手术机器人系统,提高了操作的精确性。
9.为实现上述目的,本发明提供了如下方案:
10.一种主从操作微创手术机器人系统,包括力反馈手柄、混合现实影像3d显示器、控制器、双臂协作机器人和手术导航相机;所述双臂协作机器人包括第一腔内双孔柔性臂和第二腔内双孔柔性臂,所述第一腔内双孔柔性臂内包括第一柔性操作执行臂和第二柔性操作执行臂,所述第二腔内双孔柔性臂内包括第三柔性操作执行臂和柔性内窥臂;所述第一柔性操作执行臂、所述第二柔性操作执行臂、所述第三柔性操作执行臂和所述柔性内窥臂均为五自由度以上的串联结构;
11.所述力反馈手柄用于通过所述控制器控制所述第一柔性操作执行臂、所述第二柔性操作执行臂、所述第三柔性操作执行臂和所述柔性内窥臂;所述柔性内窥臂末端为双目
内窥镜;所述手术导航相机用于获取所述第一腔内双孔柔性臂和所述第二腔内双孔柔性臂与人体上的标记点之间的相对位姿信息;所述控制器用于根据所述双目内窥镜获取的影像信息创建三维影像模型,并将预设医学影像三维合成后配准到所述三维影像模型;所述混合现实影像3d显示器用于显示所述三维影像模型和所述相对位姿信息。
12.可选地,所述双臂协作机器人还包括协作机器人基座、第一七自由度机械臂和第二七自由度机械臂;所述第一七自由度机械臂的一端与所述协作机器人基座连接,另一端与所述第一腔内双孔柔性臂连接;所述第二七自由度机械臂的一端与所述协作机器人基座连接,另一端与所述第二腔内双孔柔性臂连接,所述协作机器人基座包括具有一个自由度的腰部关节。
13.可选地,第一七自由度机械臂和第二七自由度机械臂内部均集成力矩传感器,或第一七自由度机械臂和第二七自由度机械臂内部末端均集成六维力传感器,所述力矩传感器或所述六维力传感器采集的数据通过所述控制器反馈到所述力反馈手柄。
14.可选地,所述第一柔性操作执行臂、所述第二柔性操作执行臂和所述第三柔性操作执行臂结构相同,均包括依次连接的模块化机电快换接口、驱动装置、二自由度肩关节、二自由度腕关节、一自由度回旋关节和一自由度开合器械;所述柔性内窥臂包括依次连接的模块化机电快换接口、驱动装置、二自由度肩关节、二自由度腕关节、一自由度回旋关节和双目内窥镜;所述模块化机电快换接口用于控制对应柔性操作执行臂或柔性内窥臂的运动状态和锁定状态的切换。
15.可选地,所述一自由度开合器械包括抓钳、分离钳、持针器、超声刀、双凝电极刀或神经探测仪。
16.可选地,还包括第一脚踏板和第二脚踏板;所述力反馈手柄的一端用于控制所述第一柔性操作执行臂和所述第二柔性操作执行臂,另一端控制所述第三柔性操作执行臂和所述柔性内窥臂;所述第一脚踏板用于通过所述控制器控制所述第一柔性操作执行臂和所述第二柔性操作执行臂之间运动状态和锁定状态的切换,所述第二脚踏板用于通过所述控制器控制所述第三柔性操作执行臂和所述柔性内窥臂之间运动状态和锁定状态的切换。
17.可选地,还包括3d眼镜,所述3d眼镜用于医生佩带后观看所述混合现实影像3d显示器。
18.可选地,所述力反馈手柄为并联-串联七自由度构型。
19.可选地,还包括反馈显示器和显示器支架,所述反馈显示器置于所述显示器支架上,所述反馈显示器用于显示所述混合现实影像3d显示器显示的内容。
20.可选地,还包括手术台。
21.根据本发明提供的具体实施例,本发明公开了以下技术效果:
22.本发明公开了一种主从操作微创手术机器人系统,双臂协作机器人包括第一腔内双孔柔性臂和第二腔内双孔柔性臂,第一腔内双孔柔性臂内包括第一柔性操作执行臂和第二柔性操作执行臂,第二腔内双孔柔性臂内包括第三柔性操作执行臂和柔性内窥臂;且第一柔性操作执行臂、第二柔性操作执行臂、第三柔性操作执行臂和柔性内窥臂均为五自由度以上的串联结构,提高了柔性内窥臂和各柔性操作执行臂操作灵活,且通过混合现实影像3d显示器用于显示所述三维影像模型和所述相对位姿信息实现了手术导航功能,从而提高了手术操作的精确性。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
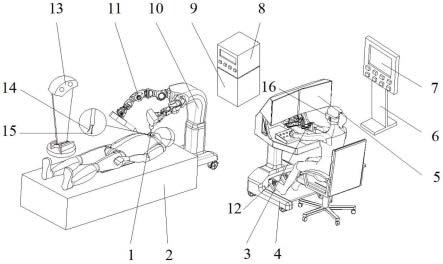
24.图1为本发明一种主从操作微创手术机器人系统结构示意图;
25.图2为本发明双臂协作机器人结构示意图;
26.图3为本发明柔性操作执行臂结构示意图;
27.图4为本发明混合现实显示交互导航系统流程图;
28.符号说明:
29.1、第二腔内双孔柔性臂;2、手术台;3、力反馈手柄;4、操作台基座;5、混合现实影像3d显示器;6、显示器支架;7、反馈显示器;8、控制器;9、控制台;10、协作机器人基座;11、第一七自由度机械臂;12、第一脚踏板;13、手术导航相机;14、第三柔性操作执行臂;15、柔性内窥臂;16、3d眼镜;101、模块化机电快换接口;102、驱动装置;103、二自由度肩关节;104、二自由度腕关节;105、一自由度回旋关节;106、机电一体化接口;107、一自由度器械开合。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.本发明的目的是提供一种主从操作微创手术机器人系统,提高了操作的精确性。
32.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
33.图1为本发明一种主从操作微创手术机器人系统结构示意图,如图1所示,一种主从操作微创手术机器人系统,包括力反馈手柄3、混合现实影像3d显示器5、手术台2、操作台、控制器8、双臂协作机器人、手术导航相机13、3d眼镜16、第一脚踏板12、第二脚踏板、反馈显示器7和显示器支架6。
34.双臂协作机器人包括第一腔内双孔柔性臂和第二腔内双孔柔性臂1。第一腔内双孔柔性臂和第二腔内双孔柔性臂1安装于双臂协作机器人末端,用于通过入路进入人体进行腔内复杂环境的手术操作。
35.第一腔内双孔柔性臂内包括第一柔性操作执行臂和第二柔性操作执行臂,第二腔内双孔柔性臂1内包括第三柔性操作执行臂14和柔性内窥臂15;第一柔性操作执行臂、第二柔性操作执行臂、第三柔性操作执行臂14和柔性内窥臂15均为五自由度以上的串联结构。
36.力反馈手柄3用于通过控制器8控制第一柔性操作执行臂、第二柔性操作执行臂、第三柔性操作执行臂14和柔性内窥臂15;柔性内窥臂15末端为双目内窥镜;手术导航相机13用于获取第一腔内双孔柔性臂和第二腔内双孔柔性臂1与人体上的标记点之间的相对位姿信息;控制器8用于根据双目内窥镜获取的影像信息创建三维影像模型,并将预设医学影
像三维合成后配准到三维影像模型;混合现实影像3d显示器5用于显示三维影像模型和相对位姿信息,实现术区信息虚实融合的可视化。
37.手术导航相机13位于手术台2一侧,手术导航相机13测量位于第一腔内双孔柔性臂、第二腔内双孔柔性臂1与人体上的标记点,计算第一腔内双孔柔性臂、第二腔内双孔柔性臂1与人体的相对位姿关系,从而将术前核磁和ct等医学影像三维合成后注册配准到术中双目内窥镜三维重建的模型上,三维重建模型显示在混合现实影像3d显示器5上;混合现实影像3d显示器5用于提供手术导航信息和腔镜三维影像。混合现实影像3d显示器5结合混合现实显示技术,增强术区中双目内窥镜的实时视频源数据采集及其投影技术,实现术区虚实融合的可视化和主刀医生偏振环境视野下术区的虚实融合效果。
38.操作台安装在医生操作位置,操作台保持水平,操作台上装有混合现实影像3d显示器5和力反馈手柄3,操作台下方设置有操作台基座4,操作台基座4上设置有第一脚踏板12和第二脚踏板。
39.手术导航相机13、混合现实影像3d显示器5和控制器8构成手术导航系统,手术导航系统提供手术导航的定位信息,实现多个工作空间的映射,如图4所示。手术导航系统,基于多个工作空间的映射实现手术导航,工作空间包括基于术前ct数据建立的头颈部区模型空间、光学导航单元定位空间、机器人柔性操作执行臂操作空间、术中腔镜图像空间以及术中混合现实显示空间,通过手术导航系统与机械臂的结构参数,建立不同工作空间的映射关系。
40.控制台9进行对双臂协作机器人和腔内双孔柔性臂的运动学与动力学的运算,与控制器8进行通信,并提供主从操作微创手术机器人的驱动感知和控制。
41.所述双目内窥镜具有两个自由度,一个偏航自由度,一个俯仰自由度,偏航自由度和俯仰自由度通过万向节结构连接,所述双目内窥镜能够扩大腔内视野角,可调节光照,并进行自动聚焦。
42.所述双目内窥镜结合vr技术,高级立体成像技术,所述双目内窥镜与所述3d眼镜配合使用,当佩戴所述3d眼镜的医生的眼睛移动时,所述双目内窥镜同步随医生的眼睛移动对患者体内进行全方位察看,所述双目内窥镜向医生展现患者体内360度视野,并且提供的是3d可视化画面。
43.所述双目内窥镜与所述3d眼镜通过主从跟踪视觉控制算法进行位置和姿态获取,所述主从跟踪视觉控制算法为建立主从跟踪视觉映射下的位姿坐标定义,对于医生头部所述3d眼镜的姿态,设定最开始的动态零点的位置为p
m0
,动态零点的位姿为r
m0
。当医生头部运动到某一时刻时,设定所述3d眼镜当前的动态位置为p
md
,所述3d眼镜当前的动态位姿为r
md
。同理,对于所述双目内窥镜,设定最开始的动态零点的位置为p
s0
,动态零点的位姿为r
s0
,设定所述双目内窥镜当前的目标动态位置为p
sd
,所述双目内窥镜当前的目标动态位姿为r
sd
。
44.由主从跟踪视觉映射关系可以得到所述3d眼镜的位置和姿态增量变化分别为:
45.δpm=p
md-p
m0 (1)
46.δrm=r
md
·rm0-1 (2)
47.根据增量式主从位置映射关系可以建立所述3d眼镜和所述双目内窥镜的位置关系为:
48.p
sd
=p
s0
+δpmꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
49.或p
sd
=p
s0
+(p
md-p
m0
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
50.所述3d眼镜和所述双目内窥镜的姿态关系为:
51.r
sd
=δrm·rs0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
52.或r
sd
=r
md
·rm0-1
·rs0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
53.建立3d眼镜和双目内窥镜的位姿(位置和姿态)关系使双目内窥镜和3d眼镜一致性运动,即主从视觉一致性跟踪,3d眼镜为主,双目内窥镜为从(3d眼镜怎么运动则双目内窥镜怎么运动)。其中,正运动学是将3d眼镜所运动的位姿通过公式(3)和公式(5)映射到双目内窥镜的运动位姿中,从而控制双目内窥镜臂的关节电机;逆运动学是将相机导航获取的对应的双目内窥镜映射到3d眼镜中。
54.如图2所示,双臂协作机器人还包括协作机器人基座10、第一七自由度机械臂11和第二七自由度机械臂;第一七自由度机械臂11的一端与协作机器人基座10连接,另一端与第一腔内双孔柔性臂连接;第二七自由度机械臂的一端与协作机器人基座10连接,另一端与第二腔内双孔柔性臂1连接,协作机器人基座10包括具有一个自由度的腰部关节,可在水平面回旋运动。协作机器人基座10、第一七自由度机械臂11和第二七自由度机械臂负责在体外定位腔内双孔柔性臂,腰部关节使机器人更加灵活。双臂协作机器人的末端与腔内双孔柔性臂衔接,基于双臂协作机器人的位置姿态来将第一腔内双孔柔性臂和第二腔内双孔柔性臂1送入头颈部。
55.第一柔性操作执行臂、第二柔性操作执行臂和第三柔性操作执行臂14结构相同,均包括依次连接的模块化机电快换接口101、驱动装置102、二自由度肩关节103、二自由度腕关节104、一自由度回旋关节105、机电一体化接口106和一自由度开合器械107;柔性内窥臂15包括依次连接的模块化机电快换接口101、驱动装置102、二自由度肩关节103、二自由度腕关节104、一自由度回旋关节105、机电一体化接口106和双目内窥镜;模块化机电快换接口101用于控制对应柔性操作执行臂或柔性内窥臂15的运动状态和锁定状态的切换。第一柔性操作执行臂、第二柔性操作执行臂和第三柔性操作执行臂14结构如图3所示。
56.柔性内窥臂15和每支柔性操作执行臂通过采集肩关节、腕关节和回旋关节的角度信息,结合已知的杆长、杆直径等结构参数,利用正向运动学计算柔性臂的形状以及末端位置和姿态。
57.通过驱动装置102实现各柔性操作执行臂精密运动,增强复杂环境中柔性臂的灵活度。
58.采用模块化机电快换接口101,实现腔内双孔柔性臂内的柔性内窥臂15或柔性操作执行臂与体外协作臂(七自由度机械臂)快速更换与锁定。
59.体内的柔性操作执行臂和柔性内窥臂的体外接口和体外协作臂末端接口对接。
60.腔内双孔柔性臂通过驱动装置102为丝杠驱动、连杆驱动或内置电机驱动等方式实现腔内双孔柔性臂精密运动,增强复杂环境中柔性臂的灵活度。模块化机电快换接口101,实现腔内双孔柔性臂内的柔性内窥臂15或柔性操作执行臂与体外协作臂快速更换与锁定。
61.腔内双孔柔性臂采用了位形测量方法,通过手术导航相机13采集柔性臂各个关节的状态,通过柔性臂的结构参数,计算出柔性臂的形状和末端位姿。
62.本发明手术机器人系统是主从操作,主手即医生操作的力反馈手柄3,从手即体内柔性臂,通过计算体内的柔性臂关节角度姿态和末端状态通过位姿矩阵主从映射到医生操作的主手上面(即医生操作的主手与体内柔性臂的动作和状态一致性)。
63.一自由度开合器械107包括但不限于抓钳、分离钳、持针器、超声刀、双凝电极刀或神经探测仪。通过机电一体化接口106,实现末端器械与腔内双孔柔性臂的集成。
64.力反馈手柄3的一端用于控制第一柔性操作执行臂和第二柔性操作执行臂,另一端控制第三柔性操作执行臂14和柔性内窥臂15;第一脚踏板12用于通过控制器8控制第一柔性操作执行臂和第二柔性操作执行臂之间运动状态和锁定状态的切换,第二脚踏板用于通过控制器8控制第三柔性操作执行臂14和柔性内窥臂15之间运动状态和锁定状态的切换。
65.3d眼镜16用于医生佩带后观看混合现实影像3d显示器5。
66.第一七自由度机械臂11和第二七自由度机械臂内部均集成力矩传感器,或第一七自由度机械臂11和第二七自由度机械臂内部末端均集成六维力传感器,力矩传感器或六维力传感器采集的数据通过控制器8反馈到力反馈手柄3。
67.反馈显示器7置于显示器支架6上,反馈显示器7用于显示混合现实影像3d显示器5显示的内容。
68.双臂协作机器人采用串联冗余自由度双臂的构型,具有腰关节,自由度分配为一个自由度的腰部关节与两个七自由度的机械臂,两个机械臂的关节内部集成力矩传感器或者在末端集成六维力传感器,机械臂采用动力学前馈补偿的控制方法,各个关节的驱动控制器8通过ether cat总线连接。
69.本发明一种主从操作微创手术机器人系统,位于主端的力反馈手柄3为并联-串联七自由度构型,从端配置为力传感器(力矩传感器或六维力传感器),可在解算出空间六维力,提供医生力反馈控制,同时实现双臂协作机器人的力控。带有力反馈手柄3的主从操作方式控制双臂协作机器人完成手术任务,同时双臂协作机器人利用七自由度的冗余自由度在零空间内实现协作避碰技术。
70.本发明通过力反馈控制台9操作一对七自由度力反馈手柄3,医生佩戴3d眼镜16观察混合现实影像3d显示器5,控制腔内双孔柔性臂开展手术。本发明操作主从操作微创手术机器人系统可适用于头颈部手术操作。
71.本发明一种主从操作微创手术机器人系统的使用方法如下:主刀医生用双手操作力反馈手柄3,用脚踩脚踏板(左脚踩第一脚踏板12,右脚踩第二脚踏板)来调整焦距和控制运转腔内双孔柔性臂。具体为医生在3d眼镜16中看到手术视野,手术器械尖端(内窥镜、抓钳、分离钳、持针器等)与外科医生的双手握持的力反馈手柄3同步运动。通过控制器8控制双臂协作机器人和腔内双孔柔性臂带动柔性操作执行臂及其上安装的手术器械到指定位置后,通过控制双臂协作机器人的各个关节实现对腔内双孔柔性臂和柔性操作执行臂的控制。基于临床术式和入路方式,双臂协作机器人和手术导航相机13根据病人手术台2相对于病人的位置来进行病人体位坐标的适当调整,以提供手术导航。通过双臂协作机器人到达预定入路位置使腔内双孔柔性臂从病人身体入路以进入手术区,在复杂的手术环境下,反馈显示器7是手术机器人的图像处理设备,柔性内窥臂15装备双目3d镜头,能放大手术视野,并且获取的图像是三维立体的,解剖结构更大更清晰,提高手术精准度。手术导航相机
13为主刀医生提供了一个影像导航,能集成频道信号给出连续的三维图像。主刀医生佩戴3d眼镜16观察混合现实影像3d显示器5。末端执行器的位姿跟踪是实时获得手术器械在某一已知空间中的位姿,位姿信号从机器人控制器8获得,在成像系统上实时显示出手术器械的位姿,提供手术时地可视化监视功能。通过操作具有力反馈手柄3来间接控制安装于双臂协作机器人末端的腔内双孔柔性臂进行头颈部手术。本发明即可实现头颈部手术。
72.本发明采用柔性臂位形测量方法,精确感知柔性臂的形状和末端位姿,扩大术野和器械运动范围,使其具有较好的柔顺性及较高的运动分辨率。利用双力反馈手柄对冗余串联双臂进行协作控制,采用主被动重力补偿策略,提升操作手感,消除操作疲劳,具有反馈校正、与自适应运动控制能力,能够进行良好的主从控制,直观地控制机械臂和末端执行机构完成精细的作业任务。
73.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
74.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1