基于电磁定位的超声探头标定方法
1.本发明涉及医学影像技术领域,特别是涉及一种基于电磁定位的超声探头标定方法。
背景技术:
2.医学超声成像技术具有操作简单、价格低廉、无电离辐射、实时成像且经皮无创等优点,在临床治疗中得以广泛应用。其中,基于超声引导的手术导航系统和三维体数据重建等领域,须依靠光学、电磁等定位装置实时追踪超声成像平面的空间位姿,实现超声图像坐标系与其他坐标系间的统一。而超声探头标定是其中一个关键环节,其目的是确定固定在超声探头上的位置传感器坐标系到二维超声图像坐标系间的变换关系。
3.超声探头的标定方法中,目前应用最广泛是n线模型方法。n线模型由一层或多层尼龙线组成n形目标,当超声平面扫描过这些n形目标时,每个n形靶线在图像上产生3个亮斑特征点。拾取三个亮斑的坐标后,通过左右2个亮斑到中间亮斑的距离之比,并结合模型的设计约束,可以求解出n形目标与成像平面交点在设计坐标系中的三维坐标值。目前,拾取亮斑的坐标、判别哪些亮斑属于同一组n线等工作,是靠人工完成的,其存在一些问题。首先,识别和确定n线编号要求操作者了解n线模型的设计信息。其次,人工拾取超声图像上的亮点坐标带有主观性,会引入随机误差。再次,为获得较好的标定精度,往往需要获得多帧图像上的几十甚至几百个n形目标人工操作耗时较长,这也更增加了发生编号错误的概率。
4.因此,设计一种标定流程少、标定精度高、不依赖复杂的机械装置的超声探头标定方法是现有技术中亟待解决的问题。
技术实现要素:
5.本发明的目的是针对现有技术中存在的技术缺陷,而提供一种安全无毒且生长速度快的基于电磁定位的超声探头标定方法。
6.为实现本发明的目的所采用的技术方案是:
7.一种基于电磁定位的超声探头标定方法,包括:
8.采用标定模板进行,该标定模板包含两块间距为超声探头厚度的面板,两块面板相对布置,且两块面板的相同位置分别具有多个分布不均的小孔,用于使标定线穿过;在两块面板外侧的相同位置分别具有多个立式布置的圆柱,每个圆柱与一个所述小孔相对应,每个圆柱顶端形成有圆锥形凹槽,圆锥形凹槽最低点的高度与小孔中心高度保持一致;
9.在标定时,将标定模板放置于介质溶液中,将固定有电磁传感器的超声探头放置在两个面板之间,采集位于两个面板间的多条标定线中点的超声图像进行处理,获得多条标定线中点的各点的超声图像坐标;
10.利用标定后的电磁探针触碰标定模板两侧的圆锥形凹槽最低点以拾取圆锥形凹槽最低点在电磁发射器坐标系中的坐标,基于多条标定线中点的各点为圆锥形凹槽最低点中各镜像分布的两点间的中点,从而基于圆锥形凹槽最低点在电磁发射器坐标系中的坐标
求出多条标定线中点在电磁发射器坐标系中的坐标;
11.利用多条标定线中点的超声图像坐标和电磁发射器坐标系,求出超声图像坐标系到电磁发射器坐标系的转换矩阵,结合电磁传感器在电磁发射器坐标系下的位置信息求出电磁传感器到超声图像坐标系间的转换矩阵,完成超声探头的标定。
12.本发明为了提高标定精度并简化标定过程,设计新型标定模板。该标定模板的主体由两块间距为超声探头厚度的面板组成,可限制超声探头在标定过程的移动,确保超声图像始终采集到指定的标记点。设计与标记点高度保持一致并相互对称的锥形槽,可快速、精确的求得标记点的空间坐标。其次,使用特征提取算法自动分割和定位标记点,以获得其在超声图像中的坐标,避免了人工拾取造成的误差,并减轻操作者的负担。最后,提出标记点超声图像坐标的校正方法,以提高进一步探头标定精度。
13.本发明的标定流程少、标定精度高、不依赖复杂的机械装置就能实现快速准确的标定。
附图说明
14.图1是本发明实施例的标定模板一个示意图。
15.图2是本发明实施例的标定模板另一个示意图。
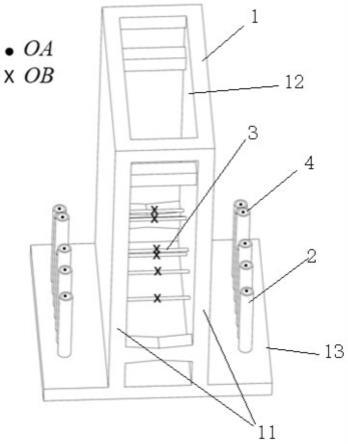
16.图3是本发明实施例标定模板与超声探头的使用示意图。
17.图4是本发明实施例超声图像处理示意图。
18.图5是本发明实施例电磁探针的示意图。
19.图6是本发明实施例电磁探针的标定示意图。
具体实施方式
20.以下结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
21.本发明实施例的基于电磁定位的超声探头标定方法,采用如图1-2所示的标定模板1进行,该标定模板可以是由3d打印制作而成,其包含两块间距为超声探头厚度的面板11,两块面板相对布置,标定模板的顶端敞口12,用于放置超声探头8,如图3所示,超声探头8的探测端竖直向下,以方便采集下方超声图像;且两块面板的相同位置分别具有6个(也可以是其它数量个,不限于此)分布不均的小孔14,高度位置不同以及间隔距离不同,用于使标定线3(如使用棉线或是其它线)穿过即可;在两块面板11外侧的底板13上的相同镜像位置分别具有6个立式布置的圆柱2(如φ4mm),每个圆柱与一个所述小孔相对应,每个圆柱顶端形成有圆锥形凹槽4,圆锥形凹槽最低点(oa)的高度与小孔中心高度保持一致;其标定步骤如下:
22.s1.将标定模板放置于介质溶液中,将带有定位用电磁传感器81的超声探头8放置在两个面板11之间的顶端,如图3所示,用于采集位于两个面板11间的多条标定线中点(ob)的超声图像。
23.s2.对采集到的多条标定线中点(ob)的超声图像进行处理,以准确获得多条标定线中点(ob)的各点的超声图像坐标。
24.首先,对获得的多条标定线中点(ob)的原始超声图像(图4中左下角标记为a的图
像)进行缩放,将像素坐标转换为空间距离坐标。其中,坐标系原点设置在图像顶部的中点,用于保证坐标系中各点的坐标不会随着超声成像宽度和深度的调节而变化。
25.其次,采用3
×
3窗口进行中值滤波处理,以消除图像噪声点,如图4中左下角标记为b的图像,之后,利用robert算子进行边缘提取,得到每个标记点的轮廓,如图4中左下角标记为c的图像。
26.最后,利用椭圆拟合函数对每个标记点轮廓进行椭圆拟合,如图4中左下角标记为d的图像;获取每个椭圆的圆心坐标,将其作为多条标定线中点(ob)的超声图像坐标,记为xi。
27.设计标定模板时,多条标定线中点(ob)相对标定模板的位置是已知的,因此可建立标定模板坐标系(k),对多条标定线中点(ob)的超声图像坐标xi进一步校正,以提高精度,如下式所示:
28.x
′i=itkxkꢀꢀꢀ
(1)
29.式中,xk是多条标定线中点(ob)在标定模板坐标系(k)中的坐标;x
′i是经校正后的多条标定线中点(ob)的超声图像坐标;itk是从标定模板坐标系(k)到超声图像坐标系的转换矩阵,可利用xi和xk求出。
30.利用经旋转标定后的电磁探针(如图5-6所示)触碰标定模板两侧的锥形槽顶点(oa)拾取锥形槽顶点(oa)在电磁发射器坐标系中的坐标。由于多条标定线中点(ob)各点为锥形槽顶点(oa)中各镜像分布的两点间的中点,故可基于锥形槽顶点(oa)在电磁发射器坐标系中的坐标求出多条标定线中点(ob)在电磁发射器坐标系中的坐标。利用多条标定线中点(ob)的超声图像坐标和电磁发射器坐标系,即可求出超声图像坐标系到电磁发射器坐标系的转换矩阵wti(可以是通过最小二乘法和奇异值分解,为现有技术算法,不再赘述),再结合电磁传感器在电磁发射器坐标系下的位置信息,即可求出电磁传感器到超声图像坐标系间的转换矩阵,完成超声探头的标定。
31.需要说明的是,在标定时,首先将电磁发射器(未示出)放置于空间中远离金属的位置(可放置于木材或塑料之上),因为金属的铁磁性、导电性等其他物理特性会在一定程度上对发射器产生的电磁波产生干扰,造成定位失真,若以电磁发射器中心为球心,需保证半径为24英寸(约0.61m)的空间内无金属或电子产品。
32.示例性的,在采用亚克力板制作的方形容器内注入介质溶液
‑‑
甘油溶液(每1l蒸馏水中加入96ml甘油),使得甘油溶液中的超声声速接近人体软组织内的平均超声声速1540m/s,其原因是超声诊断仪在校准时,其显示屏上的厘米标志是根据人体平均软组织声速来设定的,若介质中的超声声速与1540m/s相差过大,则会导致超声图像中的影像深度产生偏差。
33.示例性的,在采集超声图像时,使用图像采集卡将采集的超声图像传送至笔记本电脑,并对其进行处理,以准确获得各点的超声图像坐标。
34.作为一个可选的实施例,如图5-6示出了用于标定的末端固定有电磁传感器6(该电磁传感器6与图3所示定位用电磁传感器81位于同一电磁发射器坐标系下)的电磁探针5,其所用电磁传感器为ndi公司生产的model 800传感器,并对电磁探针进行标定以得到电磁探针的针尖相对于电磁传感器坐标系的位置,从而通过电磁探针的针尖获取指定点的坐标。
35.示例性的,在电磁探针标定时,将电磁传感器固定在电磁探针的尾部,形成一个电磁探针(固定时确保电磁传感器轴线与电磁探针轴线重合),并将电磁探针的针尖置于标定块7的中心位置并做旋转运动,电磁探针旋转的同时连续采集电磁传感器在发射器坐标系o
t
下的位置数据(可以是通过电磁传感器自带软件获取)。
36.由采集得到的电磁传感器的n组位置数据,可得到一系列方程:
37.p
t
=mi·
pr+vi,i=2,3,
…nꢀꢀ
(2)
38.式中,p
t
是针尖在发射器坐标系中的坐标,pr是针尖在传感器坐标系中的坐标;mi是电磁探针旋转到第i个位置时,电磁传感器相对于发射器坐标系的3
×
3旋转矩阵;vi是电磁探针旋转到第i个位置时,电磁传感器相对于发射器坐标系的3
×
1平移向量;式(1)中不同的i位置下p
t
都是相同的,故有
39.(m
i-m1)
·
pr+v
i-v1=0,i=2,3,
…nꢀꢀ
(3)
40.将上述(n-1)个方程相加得
[0041][0042]
令式(4)简化为:
[0043]m·
pr=v
ꢀꢀ
(5)
[0044]
将式(4)两边同时乘以m的逆矩阵m-1
,可以求得pr[0045]
pr=m-1
·vꢀꢀ
(6)
[0046]
求得pr之后,将pr代入到式(1)中,就可得到电磁探针的不同针尖位置在电磁发射器坐标系下的坐标,从而实现对电磁探针的旋转标定。
[0047]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明;
[0048]
因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0049]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1