一种全向行星轮式轮组及采用该全向轮组的轮椅的制作方法
1.本发明属于电动轮椅技术领域,尤其指一种全向行星轮式轮组及采用该全向轮组的轮椅。
背景技术:
2.本发明参考了以下技术:
3.瑞典麦克纳姆公司的麦克纳姆全向轮技术
4.武汉理工大学专利申请号20160574408.9的已公开专利
5.本发明引用了以下专利技术:
6.中国人民解放军国防科学技术大学专利号200520052595的全向轮专利技术
7.麦克纳姆轮及全向轮技术在水平面的平整环境下可以完成定向运动功能,但麦克纳姆轮及全向轮技术没有涉及攀爬、跨越立面障碍物比如具有一定坡度的台阶的功能。普通三角型行星轮组(注:所述普通三角型行星轮组,此处特指行走轮为非全向轮的三角型行星轮式子轮组,如图13所示编号为7的行走轮所在轮组)虽然可以克服一定高度的台阶或者能够攀爬楼梯,但是在承载一定负重以后,其转向功能便受到轮组的两个行走轮胎与地面摩擦力的影响,带来转向困难甚至无法转向。以上技术,没有涉及同时满足在平面既能实现前进后退还可以进行横向行驶,进一步的还可具备一定攀爬翻越台阶的解决方案。
技术实现要素:
8.本发明针对以上问题,提供了一种既能实现自由转向又能实现纵向横向都能移动,进一步还具备可以攀爬跨越一定坡度的台阶等立面障碍物的解决方案:一种全向行星轮式轮组及采用该轮组的轮椅。
9.一种全向行星轮式轮组及采用该全向轮组的轮椅,所述轮椅前端两侧各配置1个三角型行星轮式子轮组,如图1所示的序号1.右前侧全向行星轮式轮子组和序号2.左前侧全向行星轮式轮子组,该2轮组对称安装于所示序号5.右前侧轮子组腿和序号6左前侧轮子组腿下部的轮组腿支架板上并做对应固定设置;所述轮组腿分上部固定部与下部旋转部,所述轮组腿固定部以螺栓固定方式与对应底盘侧翼板连接固定;所述轮组腿下部旋转部的上侧设置垂直轴向上与所述轮组腿上部下方的轴孔设置同轴配合,并穿过所述轴孔以花键配合形式与轮组腿上部设置的轮组腿旋转伺服电机轴承杆实现同轴配合,并做对应固定设置,此设置实现了轮组腿旋转部的旋转功能;所述三角型行星轮式子轮组包含3个相等的行走全向轮;进一步的,所述3个全向轮在以所述一种全向行星轮式轮组中央驱动齿轮轴心为原点的立面呈120度间隔均匀分布;所述三个全向轮子轮旋转轴心在立面连线呈等边三角形;所述轮椅后端两侧的轮组配置与前端两侧轮组配置相同;所述3个全向轮由三块相等的三角摆臂支架板承托,并由行走驱动步进电机经由齿轮组或者链条驱动自转转或者以所述三角型行星轮式子轮组的轴心进行公转。
10.所述三角型行星轮式子轮组具体结构包括但不限于如下零件:
11.如图3所示:所述三角型行星轮式子轮组包括序号100的三角摆臂支架板、序号300的三角摆臂支架板、序号500的三角摆臂支架板、序号601的行走全向轮轴承杆、序号602 的行走全向轮轴承杆
……
序号606的行走全向轮轴承杆,序号600的中央驱动轴承杆等一共7个轴承杆。
12.如图4所示:所述三角型行星轮式子轮组包括序号101的轴承、序号102的轴承
……
序号107的轴承等一共7个轴承。
13.如图5所示:所述三角型行星轮式子轮组包括序号200的行走行星齿轮、序号201 的传动行星齿轮、序号202的中央驱动齿轮、序号203的行走行星齿轮、序号204的传动行星齿轮、序号205的传动行星齿轮、序号206的行走行星齿轮等一共7个齿轮。如图6所示:所述三角型行星轮式子轮组包括序号301的轴承、序号302的轴承
……
序号 307的轴承等一共7个轴承。
14.如图7所示:所述三角型行星轮式子轮组包括序号400的行星行走全向轮、序号401 的行星行走全向轮、序号402的行星行走全向轮。
15.如图8所示:所述三角型行星轮式子轮组包括序号501的轴承、序号502的轴承,序号503的轴承,序号504的轴承等一共4个轴承。
16.以上所述零件为本发明原理表述的必须零件,其它零件不做具体罗列。
17.所述三角型行星轮式子轮组零件的形状与位置还有作用关系如下:
18.序号100、300、500的三角摆臂支架板尺寸相等,外形相等,且分别在立面设置6个位置与尺寸一样的外围轴承孔和1个尺寸大于外围轴承孔的中央轴承孔,其中序号100、 300的三角摆臂支架板所有7个轴承孔均安装对应的轴承并做对应固定设置;序号500 的三角摆臂支架板只安装如图8所示的序号501、502、503、504等4个轴承并做对应固定设置。序号100、300、500的三角摆臂支架板位置如图3所示。序号601、603、605 的行走全向轮轴承杆贯穿序号100、300、500的三角摆臂支架板,由对应轴承固定支撑,并设置对应连接关系;序号200的行走行星齿轮位于序号100和300三角摆臂支架板之间,与序号601行走全向轮轴承杆设置键连接锁定驱动关系并做对应固定设置;序号400 的行星行走全向轮位于序号300和500三角摆臂支架板之间,与序号601行走全向轮轴承杆设置键连接锁定驱动关系,并做对应固定设置;以上设置形成序号200行走行星齿轮与序号400行星行走全向轮的同步转动关系,即200.行走行星齿轮驱动400.行星行走全向轮;图3所示序号603行走全向轮轴承杆与图5所示序号203行走行星齿轮、图7所示401行星行走全向轮之间的位置与配合关系与序号601、序号200、序号400的位置与配合关系一致;图3所示序号605行走全向轮轴承杆与图5所示序号206行走行星齿轮、图7所示402行星行走全向轮之间的位置与配合关系与序号601、序号200、序号400的位置与配合关系一致。
19.图3所示序号602传动轴承杆贯穿序号100、300的三角摆臂支架板,由图4所示序号102.轴承与图6所示序号302.轴承承托并做对应固定设置;如图5所示序号201 行星传动齿轮位于序号100、300三角摆臂板之间并与所述序号602传动轴承杆设置同轴关系配合关系并做对应固定设置。所述所示201行星传动齿轮传递来自如图5所示序号 202中央驱动齿轮的扭矩与转速给序号200的行走行星齿轮;图3所示序号604传动轴承杆与序号100、300三角摆臂支架板、图5所示204.传动行星齿轮的位置与配合关系与序号602和序号100、300、201的位置与配合关系一致。
20.图3所示序号606传动轴承杆与序号100、300三角摆臂支架板、图5所示205.传动行星齿轮的位置与配合关系与序号602和序号100、300、201的位置与配合关系一致。图3所示序号600.中央驱动轴承杆贯穿序号100、300、500的三角摆臂支架板,由序号并在序号100.三角摆臂支架板一侧探出带有键槽的一段轴承杆以与所述驱动电机转子轴承杆设置对应连接;如图5所示序号202.中央驱动齿轮,位于序号100、300三角摆臂支架板之间,并与序号600.中央驱动轴承杆形成键连接关系并做对应固定设置;所述序号600. 中央驱动轴承杆传递来自所述驱动电机的扭矩与转速给所述序号202.中央驱动齿轮;进一步的,所述序号202.中央驱动齿轮与序号201、204、205的传动行星齿轮分别呈120度形成啮合关系;进一步的,所述序号201、204、205的传动行星齿轮又与所述序号200、 203、206行走行星齿轮形成啮合关系;进一步的,所述驱动电机把扭矩与转速传递给了三个方向上的行星行走全向轮;进一步的,在平面路况下,所述三个行星行走全向轮当中有两个与路面接触与地面发生接触滚动运动关系;进一步的,在遇到立面障碍物时,所述两个与路面接触的全向轮的前面一个由于无法继续转动将被卡死,由于全向轮与地面接触的特点是分段接触,所以其摩擦力要大于普通轮(此处的普通轮是指如附图13序号7所示),全向轮被卡死的概率远大于普通轮,进而在被立面障碍物挡住之后,全向轮打滑概率低于普通轮;进而保证了本发明所述一种全向行星轮式轮组的爬楼性能得到提升。
附图说明
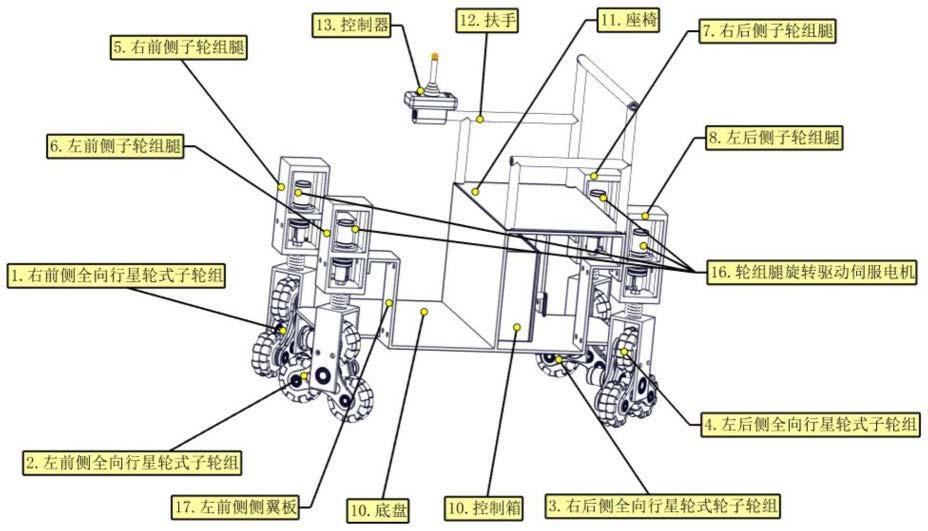
21.图1为本发明所述的轮椅概览示意图,主要组件如下:(1)右前侧全向行星轮式轮组、 (2)左前侧全向行星轮式轮组、(3)右后侧全向行星轮式轮组、(4)左后侧全向行星轮式轮组、(5)右前侧子轮组腿、(6)左前侧子轮组腿、(7)右后侧子轮组腿、(8)左后侧子轮组腿、(10)控制箱、(11)座椅、(12)扶手、(13)控制器、(16)轮组腿旋转驱动伺服电机、(17)左前侧侧翼板、(20)底盘;
22.图2为本发明所述的轮椅概览示意图补充图,主要组件如下:(9)蓄电池、(14)右前侧侧翼板、(15)行走驱动步进电机、(18)左后侧侧翼板、(19)右后侧侧翼板;
23.图3为本发明所述的三角型行星轮式子轮组示意图,主要标记的组件如下:(100)三角摆臂支架板、(200)行走行星齿轮、(300)三角摆臂支架板、(400)行走行星全向轮、(500) 三角摆臂支架板、(601)行走全向轮轴承杆、(602)行走全向轮轴承杆、(603)行走全向轮轴承杆、(604)传动轴承杆、(605)行走全向轮轴承杆、(606)传动轴承杆、(600)中央驱动轴承杆;
24.图4为本发明所述三角型行星轮式子轮组补充示意图,主要标记的组件如下:(100) 三角摆臂支架板、(101)轴承、(102)轴承、(103)轴承、(104)轴承、(105)轴承、(106) 轴承、(107)轴承、(200)行走行星齿轮、(300)三角摆臂支架板、(400)行走行星全向轮、(500)三角摆臂支架板;
25.图5为所述三角型行星轮式子轮组的一个剖视图,主要标记的组件如下:(200)行走行星齿轮、(201)传动行星齿轮、(202)中央驱动齿轮、(203)行走行星齿轮、(204)传动行星齿轮、(205)传动行星齿轮、(206)行走行星齿轮;
26.图6为所述三角型行星轮式子轮组的一个剖视图,主要标记的组件如下:(301)轴承、(302)轴承、(303)轴承、(304)轴承、(305)轴承、(306)轴承、(307)轴承;
27.图7为所述三角型行星轮式子轮组的一个剖视图,主要标记的组件如下:(400)行星行走全向轮、(401)行星行走全向轮、(402)行星行走全向轮;
28.图8为所述三角型行星轮式子轮组的一个剖视图,主要标记的组件如下:(501)轴承、(502)轴承,(503)轴承,(504)轴承;
29.图9为轮椅“==”型轮组布局侧视彩图;
30.图10为轮椅“==”型轮组布局俯视线条图;
31.图11为轮椅“o”型轮组布局侧视彩图;
32.图12为轮椅“o”型轮组布局俯视线条图;
33.图13为非全向轮的三角型行星轮式子轮组示意图,组件如下:(7)行走轮、(6)台阶。
具体实施方式
34.本发明所述一种全向行星轮式轮组及采用该轮组的轮椅之轮椅构成如下:
35.如图1图2所示:
36.序号6.左前侧轮组腿旋转部两片支架板设置有承托轴承用以连接固定左前侧全向行星轮式子轮组,配以附件做对应设置,与序号15.行走驱动步进电机相同配置的电机安装在两片支架板内测的支架板上(内侧定义:从驾驶者角度,远离轮椅方向为外侧,反之即为内侧)。序号6.左前侧轮组腿固定部以螺栓紧固方式与序号10.底盘相连的侧翼板连接固定,并设置转角驱动装置,作为优选的,本方案采用序号16.旋转腿驱动伺服电机控制旋转部的转角;所述序号6.左前侧轮组腿旋转部与固定部之间通过轴承杆与轴承连接,并做对应固定设置,所述16.旋转腿驱动伺服电机的转子轴承杆与所述轮组腿轴承杆以联轴器连接,并做对应固定设置。所述序号6.左前侧轮组腿旋转部设置有纵向震动缓冲装置,作为优选的,本方案采用缓冲弹簧。
37.序号5、7、8轮组腿与对应的序号1、3、4轮组及对应驱动电机及序号10.底盘的侧翼板连接与配置同序号6.左前侧轮组腿。与所述14.驱动电机同型号的驱动电机均安装于轮组腿内测支架板上。
38.序号10.底盘上部安装轮椅座椅,作为优选的,本方案以焊接方式连接固定轮椅底盘和座椅;所述12.扶手位于座椅上方,13.控制器安装于轮椅扶手延长杆上。所述10.控制箱,设置于地盘上方,座椅下方,并做对应固定设置;所述蓄电池,安装于地盘上方,座椅下方,控制箱侧,并做对应固定设置。
39.该轮椅具备的独特性能:
40.1.在平整路况下或者平面空间内,通过图1所示13.控制器按钮控制轮椅的4个全向行星轮式子轮组旋转构成“o”型布局如图11、图12所示:此种情况下拨动13.控制器手柄“前推”保持1秒钟以上,轮椅即向前行进;拨动13.控制器手柄“后拉”保持1秒钟以上,轮椅即向后倒退;拨动13.控制器手柄“左摆”保持1秒钟以上,轮椅在不调整自身方向的情况下向左侧横移;拨动13.控制器手柄“右摆”保持1秒钟以上,轮椅在不调整自身方向的情况下向右侧横移;在俯视轮椅视角下,持续顺时针摇动控制器手柄,轮椅即在原地以自身水平面中心点为圆心的平面内进行顺时针旋转;在俯视轮椅视角下,持续逆时针摇动控制器手柄,轮椅即在原地以自身水平面中心点为圆心的平面内进行逆时针旋转。本发明所述一种全向
行星轮式轮组及采用该轮组的轮椅能够实现在原地不进行旋转调整自身方向的条件下实现前进、后退、左横移、由横移,给使用者灵活移动增加了便利。
41.2.当遇到台阶等立面障碍物时,通过图1所示13.控制器按钮控制轮椅的4个全向行星轮式子轮组旋转构成“==”型布局如图9、图10所示:此种状态下拨动13.控制器手柄“前推”,轮椅即向前行进,当遇到台阶时所述全向行星轮式子轮组的与地面接触的行走全向轮的前侧轮将与地面和台阶立面同时接触,在轮椅驾驶者与轮椅自身双重压力情况下该前侧轮同时受到来自台阶立面的阻力,这种情况下该全向轮将被卡住,进而停止自转,由于所述全向行星轮式子轮组的齿轮啮合关系,会导致其余两行走全向轮同时停止自转,进一步的,由于所述行走驱动步进电机会持续输出转矩,进而会驱动所述子轮组以中央驱动轴承杆的轴线为中心线进行自转,从而攀爬台阶或者或者翻越台阶。由于所述一种全向行星轮式轮组自身尺寸固定,其固有尺寸决定自身所能攀爬与翻越的台阶等障碍物的能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1