手术机器人的末端工具的重力补偿方法、手术机器人与流程
本发明属于手术机器人控制领域,特别涉及一种手术机器人的末端工具的重力补偿方法、手术机器人。
背景技术:
1、对于手术机器人末端工具的重力补偿的问题,传统的手术机器人的末端工具的重力补偿方法是在机械臂末端的多个姿态下,待末端工具静止稳定后,分别读取力传感器的读数,再利用公式推导求出安装末端工具后力传感器的初始值,然后再在运动过程中,用力传感器的读数减去力传感器的初始值实现重力补偿,这一类方法并未考虑运动过程中转动惯量对六维力传感器受力的影响,且需进行复杂的运动学建模分析,存在补偿精度不高、计算复杂的缺陷。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中基于复杂的运动学建模分析进行手术机器人的末端工具的重力补偿的补偿精度不高、计算复杂的缺陷,提供一种手术机器人的末端工具的重力补偿方法、手术机器人。
2、本发明是通过下述技术方案来解决上述技术问题:
3、一种手术机器人的末端工具的重力补偿方法,包括:
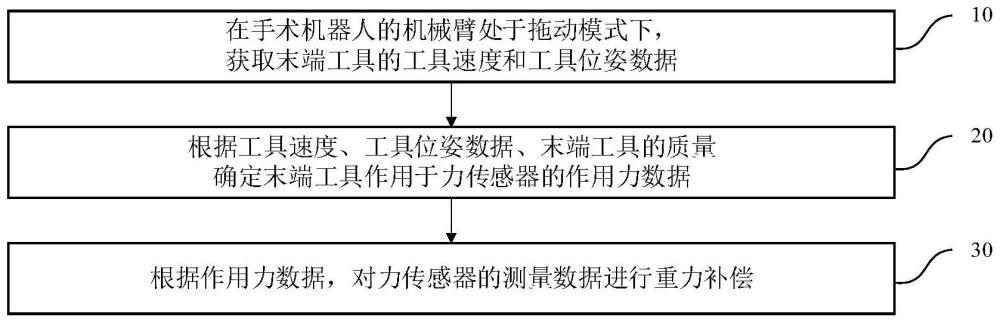
4、在所述手术机器人的机械臂处于拖动模式下,获取所述末端工具的工具速度和工具位姿数据;
5、根据所述工具速度、所述工具位姿数据和所述末端工具的质量,确定所述末端工具作用于所述手术机器人的力传感器的作用力数据;
6、根据所述作用力数据,对所述力传感器的测量数据进行重力补偿。
7、较佳地,所述根据所述工具速度、所述工具位姿数据和所述末端工具的质量,确定所述末端工具作用于所述手术机器人的力传感器的作用力数据的步骤具体包括:
8、将所述工具速度、所述工具位姿数据和所述质量输入力预测模型,获取所述力预测模型输出的所述作用力数据;
9、其中,所述力预测模型基于所述末端工具的样本运动数据训练得到,所述样本运动数据包括多个样本末端工具的样本质量,以及在所述机械臂处于独立运动模式下,每个样本末端工具在不同时刻的样本工具速度、样本工具位姿数据和力传感器的样本测量数据。
10、较佳地,所述方法获取所述样本运动数据的步骤具体包括:
11、获取所述手术机器人的样本末端工具的样本质量;
12、在所述机械臂处于独立运动模式下,在不同时刻获取所述样本末端工具的样本工具速度、样本工具位姿数据和力传感器的样本测量数据,将每个时刻对应的样本质量、样本工具速度、样本工具位姿数据和样本测量数据作为一个子样本数据;
13、更换不同样本质量的样本末端工具,并重复执行在所述机械臂处于独立运动模式下获取子样本数据的步骤,以获取多个子样本数据,并将所述多个子样本数据作为所述样本运动数据。
14、较佳地,所述方法获取所述工具位姿数据的步骤具体包括:
15、获取机械臂末端的末端位姿数据;
16、根据所述机械臂末端与所述末端工具的相对位置关系以及所述末端位姿数据,确定所述工具位姿数据。
17、较佳地,所述手术机器人的机械臂包括至少一个关节,所述方法获取所述工具速度的步骤具体包括:
18、获取每个关节的关节角和关节角速度;
19、基于所有的所述关节角确定雅可比矩阵,基于雅可比矩阵和所有的所述关节角速度确定所述工具速度。
20、较佳地,所述根据所述作用力数据,对所述力传感器的测量数据进行重力补偿的步骤具体包括:
21、将所述测量数据减去所述作用力数据得到的差值,作为重力补偿后的数据。
22、较佳地,所述工具位姿数据为欧拉角或rpy角。
23、一种手术机器人的末端工具的重力补偿系统,包括处理器和力传感器,其中,所述力传感器设于所述手术机器人的机械臂末端和所述手术机器人的末端工具之间,所述力传感器用于将测量数据发送给所述处理器;
24、所述处理器用于在所述机械臂处于拖动模式下,获取所述末端工具的工具速度和工具位姿数据;根据所述工具速度、所述工具位姿数据和所述末端工具的质量,确定所述末端工具作用于所述力传感器的作用力数据;根据所述作用力数据,对所述力传感器的测量数据进行重力补偿。
25、一种手术机器人,包括机械臂、末端工具以及上述的手术机器人的末端工具的重力补偿系统。
26、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的手术机器人的末端工具的重力补偿方法。
27、本发明的积极进步效果在于:本申请在机械臂的实际运动过程中,固定安装在其末端的末端工具对力传感器产生的力和力矩能够通过末端工具的质量、位姿数据和速度实时获取,使得不同质量的末端工具、不同速度下的末端工具的转动惯量大小对力传感器的测量数据的影响能够进行量化,进而对于力传感器的测量数据的重力补偿更加精准。
技术特征:
1.一种手术机器人的末端工具的重力补偿方法,其特征在于,包括:
2.如权利要求1所述的手术机器人的末端工具的重力补偿方法,其特征在于,所述根据所述工具速度、所述工具位姿数据和所述末端工具的质量,确定所述末端工具作用于所述手术机器人的力传感器的作用力数据的步骤具体包括:
3.如权利要求2所述的手术机器人的末端工具的重力补偿方法,其特征在于,所述方法获取所述样本运动数据的步骤具体包括:
4.如权利要求1所述的手术机器人的末端工具的重力补偿方法,其特征在于,所述方法获取所述工具位姿数据的步骤具体包括:
5.如权利要求1所述的手术机器人的末端工具的重力补偿方法,其特征在于,所述手术机器人的机械臂包括至少一个关节,所述方法获取所述工具速度的步骤具体包括:
6.如权利要求1所述的手术机器人的末端工具的重力补偿方法,其特征在于,所述根据所述作用力数据,对所述力传感器的测量数据进行重力补偿的步骤具体包括:
7.如权利要求1所述的手术机器人的末端工具的重力补偿方法,其特征在于,所述工具位姿数据为欧拉角或rpy角。
8.一种手术机器人的末端工具的重力补偿系统,其特征在于,包括处理器和力传感器,其中,所述力传感器设于所述手术机器人的机械臂末端和所述手术机器人的末端工具之间,所述力传感器用于将测量数据发送给所述处理器;
9.一种手术机器人,其特征在于,包括机械臂、末端工具以及如权利要求8所述的手术机器人的末端工具的重力补偿系统。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7任一项所述的手术机器人的末端工具的重力补偿方法。
技术总结
本发明公开了一种手术机器人的末端工具的重力补偿方法、手术机器人,方法包括:在手术机器人的机械臂处于拖动模式下,获取末端工具的工具速度和工具位姿数据;根据工具速度、工具位姿数据和末端工具的质量,确定末端工具作用于手术机器人的力传感器的作用力数据;根据作用力数据,对力传感器的测量数据进行重力补偿。本申请在机械臂的实际运动过程中,固定安装在其末端的末端工具对力传感器产生的力和力矩能够通过末端工具的质量、位姿数据和速度实时获取,使得不同质量的末端工具、不同速度下的末端工具的转动惯量大小对力传感器的测量数据的影响能够进行量化,进而对于力传感器的测量数据的重力补偿更加精准。
技术研发人员:高浩
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!